基于柔性水翼的波浪滑翔器設計
2023-03-27 06:34:34劉莘怡林愛梅吳思淇尹新彥
科技創新與應用 2023年8期
劉莘怡,劉 穎,林愛梅,吳思淇,尹新彥
(北京理工大學珠海學院,廣東 珠海 519800)
波浪滑翔器是一種依靠波浪能驅動的新型水面無人航行器,作為一種新型的可持續的海洋觀測平臺,其通過海洋中源源不斷的波浪能獲取前進動力[1-3]。利用母船上自帶的太陽能電池板不斷地補充能量,為控制系統、導航系統、通信系統以及各種海洋監測設施提供能量,續航能力得到了極大的保障,使其作用范圍和作業時間要比其他海洋觀測裝備高[4-8]。另外,應用這2 種可再生的清潔能源,不僅遵循新發展理念,可以更好地去保護生態環境,還可以實現長時間遠距離地在寬大的海域上航行,彌補了現有海洋監測設備的不足,開發出完全利用自然能源即可實現自主航行的新型海洋監測器[9]。美國Liquid Robot 公司開發了利用波浪能垂蕩運動提供運動能量的機動浮標產品Wave Glider,完成多次海試任務,已在水體和洋流的測量、海洋氣象、溢油泄漏檢測、海洋生物監測和海洋環境生態研究等多領域得到應用,并且在橫穿太平洋的PACX 活動中,打破了無人海洋機器人行駛最遠距離的世界記錄[1]。
簡單來說,波浪滑翔器作為一種新型的自主海洋觀測平臺,具有航行時間長、自主性強、零排放和經濟性高等突出優點。與傳統的需自帶電源動力的海洋觀測設備相比,波浪滑翔器只需依靠自然能源驅動便可航行,具有強大的環境適應性。其能長期、自主地執行環境監測、水文調查、氣象預報、生物追蹤、遠程預警和通信中繼等作業,且能在不同海況下進行觀測,觀測性能良好,在海洋領域呈現廣闊的應用前景[10]。
1 機械結構設計
1.1 總體結構
波浪滑翔器主要由3 部分組成,分別是水上母船、柔性纜繩及水下滑翔體。水面母船主要由太陽能電池板、螺旋槳及漂浮材料包圍起來的密封艙室、天線、控制系統及各種傳感器等組成。水下滑翔體采用純機械的方式,不需要外界能量供給,只需要從波浪的上下運動中獲取能量,將波浪能轉化為機械能,便可以驅動機構的前行,其主要由可轉動的翼板、轉向舵輪、彈簧及身體支撐架等組成。柔性纜繩連接著水上母船和水下滑翔體,保證其整體運動姿態。該類型的機構能夠實現長時間、大范圍、零排放、靈活自主和經濟性高等優勢的海洋觀測作業,避免反復回收更換電池,有效節約能源,通過PID 技術在某一位置固定觀測,具有廣泛應用前景。
水上母船的結構基本對稱,底面寬,且在母船前進方向側設置了整流的造型,使水上母船能更好地在水面漂浮,后面的推進器是輔助動力源,一旦需要輔助動力驅動,推進器會開始工作。天線負責與岸基基站的信號接收天線通信,太陽能電池板輔助發電。太陽能電池板捕獲的電能儲存在蓄電池中,為整個平臺的電力系統提供穩定的能源。
水下滑翔體尾部的轉向舵輪采用左右對稱的結構,中間鏤空,使水流通過時水壓力相等,從而能直立靠自身重力向下運動。左右兩側的翼板通過翻轉產生推力,彈簧式翼板受到下限位角的約束。
1.2 運動機理
波浪滑翔器主要以波浪滑翔器捕獲的波浪能作為前行動力,而水上母船搭載的太陽能電池板吸收的能量主要供應給其上搭載的控制系統、通信系統和各類傳感器等進行驅動。通過使用該2 種清潔能源,解決了海洋航行器動力源及搭載設備用電的難題。
波浪滑行器的運動以波浪理論和水下動力學為基礎。通過計算分析可知,當波浪滑翔器沿著波面爬升時,柔性纜繩處于緊繃狀態,此時水上母船上浮并通過柔性纜繩拉動波浪滑翔器向上爬升,但是此時水翼又受到水動力的影響向后下方轉動,滑翔器在這二者的共同作用下產生了一個向前的水平推力,帶動波浪滑翔器向前運動;當波浪滑翔器隨著波面下降的時候,柔性纜繩處于松弛狀態,波浪滑翔器受重力影響向下運動,同時拉動水上母船向下運動,與此同時,水翼還受到了水動力的影響向后上方轉動,滑翔器在這二者的約束下產生水平向前的推力,于是整機向前推進。綜上所述,不難發現,波浪滑翔器在工作過程中,無論是沿著海浪向上浮動還是向下沉墜,波浪滑翔器的側翼板都會產生向前的推力,波浪滑翔器正式利用該推力向前運動,同時通過柔性纜繩的作用,帶動水上母船向前運動,從而實現了整機前進,很好地利用了由波浪能轉換而來的機械能,如圖1 所示。
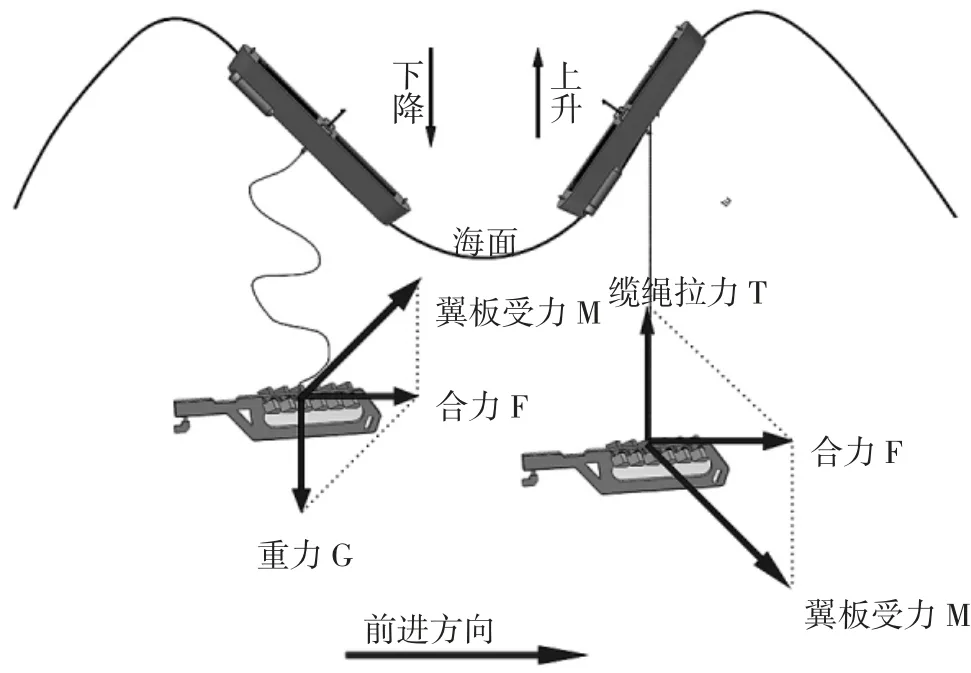
圖1 波浪滑翔器的水動力分析
由上述可知,只要存在波浪,就能帶動母船上浮或者下潛,水下翼板就會產生向前的推力,帶動波浪滑翔器整體向前運動。此外,由于波浪滑翔器上帶有轉向舵機,可以控制波浪滑翔器的航行方向,而且該方向不受海浪方向影響。可以說,巧妙的結構設計保證其能依靠波浪能一直向前航行,而轉向舵機的加入很好地解決了方向掌控上的一大難題。
1.3 基于柔性水翼的機械結構設計
波浪滑翔器主要由身體支架、6 組平行對稱的柔性水翼、彈簧、轉向舵輪和萬向節吊鉤等組成。由于整機的前進動力能源基本都來自波浪能,因此波浪滑翔器的結構設計就顯得尤為重要。受波浪、重力和加速度等因素的影響,水翼所獲得的推力并不高,而且推進效率也較低,為了整機能夠更理想最大限度地發揮其預設作用,需要對波浪滑翔器整機進行結構設計優化,同時優化整體結構的穩定性。
水翼翼板是波浪滑翔器捕獲波浪能并將其轉為前進動力的關鍵結構,水翼翼板的設計和選型決定著波浪滑翔器的推進效率和穩定性。根據水下環境情況及作業要求,在設計水翼翼板時主要參考了低速翼的設計方法,要求側翼板的尺寸和側翼板的翼型及尺寸適應實際的海洋水流沖刷,在運動過程中盡量避免在側翼板發生流動分離現象,進而提高推進效率增加側翼板往復運動的頻率。另外,側翼板之間的分布間距設計,以及翼板展弦比、后掠角和翼板的擺動角度也需要適應實際的洋流海況,防止發生干涉或交叉,減少對升阻比的影響,保證推進效率,提高穩定性。
當母船受到波浪沖上浮時,波浪滑翔器向前移動,水翼向上翻轉的速度遠低于向下翻轉的速度。假設當海浪浪高較大時,由于波浪滑翔器的工作波高較大,水翼向下旋轉運動時,容易在下限位角的固定部件之間產生強烈的剛性碰撞,導致部件疲勞損壞及能量損耗,無法前行。反之,當波浪滑翔器母船工作時遇到波浪的波高較小時,水翼極有可能無法達到其最大下限位角,進而導致翼板無法實現上下正常翻動。因此在這里提出將水翼改進為彈性水翼的設想,通過固定其上限位角,并用彈簧約束其下限位角。如果遇到波浪波高較大時,彈簧機構可以避免在水翼與下限位角固定部件之間產生剛性碰撞,這部分額外能量將被以彈性勢能的方式儲存在彈簧中,避免翼板結構被破壞; 如果波浪波高比較小,那么儲存的彈簧勢能將釋放給翼板回復力,為波浪滑翔器提供前進的動力。
在波浪滑翔器的運行過程中,期望能盡量實現水上母船的吃水深度在一個穩定范圍內波動,同時在這個區間的范圍內要兼顧提高波浪傳遞效率,這就要求母船的面積要大、質量要小且材質要好,以均攤影響;另外與海面接觸的下表面應采取流線型設計,以減少前進阻力。由能量守恒定律可得,水上母船的質量減少了,那么波浪滑翔器的重量就要增大。為了保證運動過程當中整機姿態的穩定,要求波浪滑翔器的重心、浮心、吊點及水動力中心保持在同一條豎直線上。
2 硬件設計
2.1 控制系統設計
本設計采用LPC2478 作為Mini ARM 嵌入式核心板的微處理器,中央處理器采用ARM7TDMI 芯片,選用XW540-T260-R 型防水舵機,外圍留有端口,用于連接傳感器、通信系統和供電系統等,系統框架圖如圖2 所示。傳感器主要用于感知周圍環境信息,提供波浪滑翔器的姿態信息、周圍噪音、水溫、風速和濕度等。GPS 模塊的經緯度由LPC2478 接收,航向角數據則由位置保持控制算法處理,進而控制舵機打舵偏角,保證波浪滑翔器的航向控制,完成自主航行。
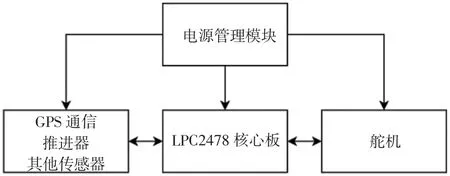
圖2 總體控制框圖
無線通信電路通過與遠端連接以監測設備正常運行。采取中繼通信,在岸基基站建信號接收天線,與波浪滑翔器的天線建立聯系取得通信,將發現作業目標蹤跡時的監測數據回傳給岸基基站。
2.2 電源管理模塊設計
波浪滑翔器電源要分別為主控芯片、通信模塊和攜帶的監測設備等供電,而電能持續來源于太陽能板,不同于其他供電方式。因此,電源管理模塊采用低功耗單片機,通過外設繼電器控制電路,增加太陽能智能控制系統進行電源使用管理,其原理框圖如圖3 所示。
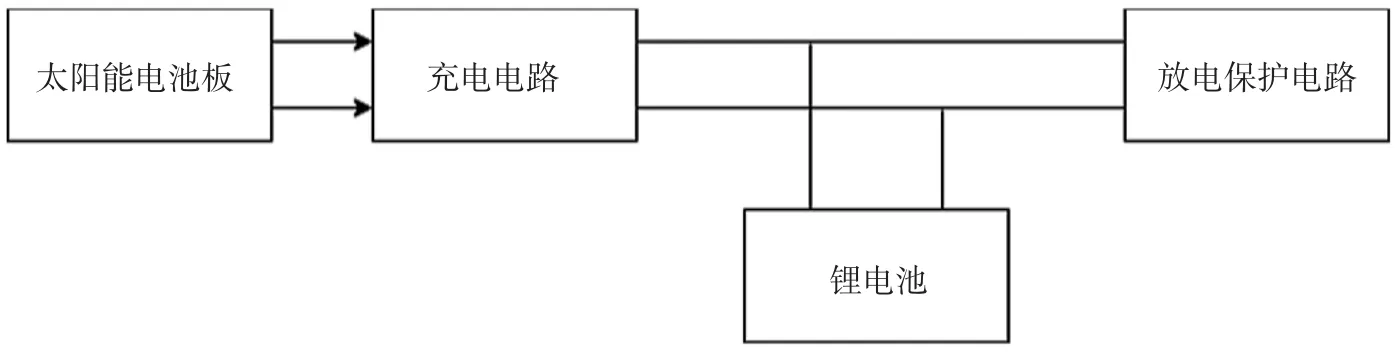
圖3 電源管理示意圖
充放電保護電路如圖4 所示,左側為太陽能充電電路的主控芯片CN3065,該充電電路可以將太陽能板轉換的電能為鋰電池進行充電。如果太陽能板產生的輸入電壓大于設定的閾值電壓及鋰電池的端電壓,那么主控芯片將開始對鋰電池充電,此時紅色LED 點亮,當綠色LED 亮起時,則表示鋰電池充滿。右側放電保護電路的主控芯片CN301 用于檢測鋰電池極端的電壓。如果太陽能板兩端充電電壓高于設定的高電壓警戒閾值,此時NMOS 管和PMOS 管將被導通,放電回路開始工作。如果鋰電池兩端電壓持續下降到低于設定的過低電壓警戒閾值時,那么NMOS 管和PMOS 管將被截止,此時切斷放電回路,實現鋰電池低電量保護功能。

圖4 充電放電保護電路設計原理圖
3 位置保持控制算法
波浪滑翔器有效地利用了波浪能在海面上隨波逐流,在發現某特定目標時,需要波浪滑翔器在某一區域停駐監測。因此,為了讓波浪滑翔器能夠在某一區域保持穩定懸停,本文采用了一種位置保持控制算法,來使波浪滑翔器在某一區域穩定保持。該算法基于分區控制和約束圓理論,如圖5 所示。一個圓是由一個只有圓心的位置保持點構成的,這個位置保持點稱為約束圓區域。根據坐標系的象限分割法,約束圓分為4 個區域,即區域I、區域II、區域III 和區域IV。在約束圓中,波浪滑翔器的預期航向根據其位置設置為一個常數值,即I 區預期航向為-3π/4、II 區預期航向為3π/4、III區預期航向為π/4 和IV 區的預期航向為-π/4。當波浪滑翔器脫離約束圓時,根據其當前位置和期望保持點計算其期望航向,然后利用模糊PID 控制器計算所需的舵角,使波浪滑翔器移動到位置保持點。由于波浪滑翔器機動性較差,而位置保持控制算法能減少波浪滑翔器在保持位置點附近期望航向的變化次數,將運動區域約束在約束圓區域內,提高了導航穩定性,減少了不必要的能量消耗,實現了保持位置的功能。當波浪滑翔器進入約束區域時,預期航向不會改變,只有當其離開約束區域時,預期航向才會改變。
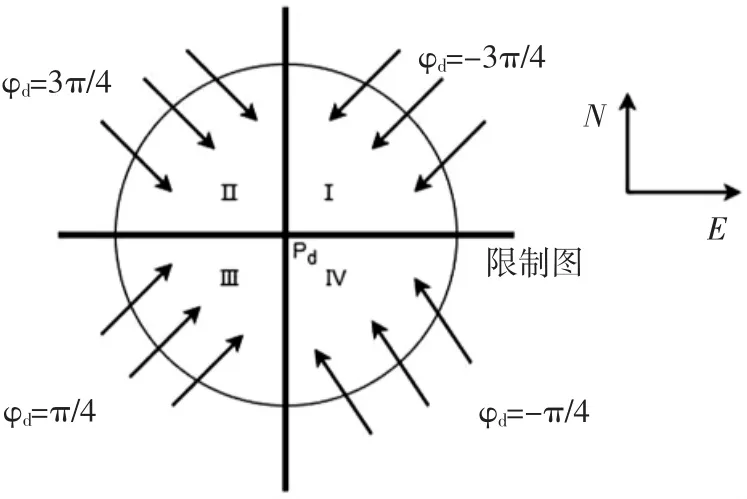
圖5 位置保持控制算法
4 結論
本文設計了一種基于柔性水翼的波浪動力無人航行器,該設備是一種利用海洋波浪能即可實現自主航行的新型海洋監測平臺,該設備將海浪的能量轉化機械能,將波浪能轉化為正向能量推力,與波浪方向無關,其主體結構有水面母船、水下滑翔體和柔性纜繩3大部分組成。通過采用一種柔性水翼設計,以實現有效緩解了水下滑翔體翼板應力損傷以及增加翼板在驅動中的作用。本文采用了一種位置保持控制算法來實現波浪滑翔器能夠長時間在某一特定海域保持位置穩定,以便實現特定區域的監測。采用以上設計可以實現波浪滑翔器長時、定點監測任務,以更好地利用和開發海洋資源,保護生態系統多樣性。
