無人機大場景模型在鐵路地形圖測繪中的應用
2023-03-27 06:35:16趙一方
科技創(chuàng)新與應用 2023年8期
趙一方
(中鐵第一勘察設(shè)計院集團有限公司,西安 710043)
無人機航空攝影測量具有機動靈活、影像清晰和成本低廉等優(yōu)勢,可以便捷地獲取地物地貌信息,彌補了既有手段效率低、成本高、周期長的短板,已成為傳統(tǒng)攝影測量技術(shù)的有效補充[1-3]。但無人機攝影測量使用的立體模型仍是單個像對,觀測范圍有限,需要頻繁切換像對來進行大范圍場景瀏覽,嚴重影響生產(chǎn)效率[4]。
為充分發(fā)揮無人機航測技術(shù)優(yōu)勢,進一步提高鐵路無人機航測制圖生產(chǎn)效率,基于李德仁等[4-5]提出的航空影像大場景立體模型理論,本院自主研發(fā)了基于無人機影像大場景立體模型的數(shù)字化測圖軟件[6-8]。無人機大場景能夠大范圍地再現(xiàn)地形地物三維信息,彌補了單像對立體模型觀測范圍受限的缺點,在大場景模型上進行測圖能夠極大地提高無人機航測制圖效率。
1 大場景立體模型
1.1 基本原理
大場景立體模型是由數(shù)字微分糾正鑲嵌后的大范圍無縫正射影像(左片)與引入左右視差后生成的立體輔助影像(右片)構(gòu)成的,可以看作是一個大范圍的單像對立體模型,其核心技術(shù)包括數(shù)字微分糾正鑲嵌與人為視差引入。數(shù)字微分糾正鑲嵌的目的是把大量離散的航攝像片制作成為大范圍無縫正射影像,但由于消除了地形投影差,大場景立體模型的地形理論上是一個平面,沒有起伏,僅地物保留了立體效果。因此需要人為在大場景右片上引入左右視差,來模擬消除了的地形投影差,達到恢復地形起伏的目的。
1.2 制作流程
無人機影像大場景立體模型的制作流程主要包括影像勻光勻色、DEM 生成、拼接線編輯和大場景立體模型生成4 個步驟,如圖1 所示。
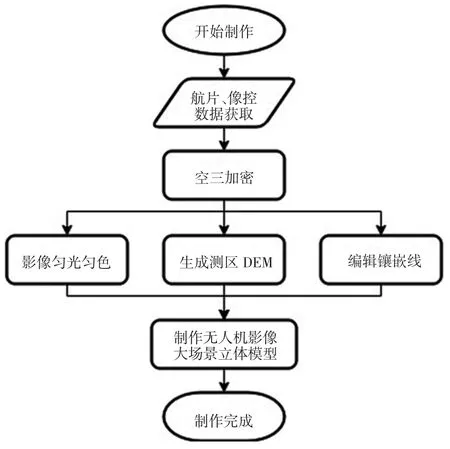
圖1 無人機影像大場景立體模型制作流程圖
影像勻光勻色是指將輸入影像調(diào)整成為亮度適中、反差均勻、色彩一致的影像。由于航空攝影過程中時相、環(huán)境、姿態(tài)和對象等客觀因素的差異,不同測段、不同航線之間的影像容易出現(xiàn)過亮過暗、色彩不一致、噪聲過大和反差不均勻等現(xiàn)象。使用這樣的影像進行數(shù)字鑲嵌會導致大場景立體模型接邊痕跡明顯,視覺效果差,給后續(xù)工作如影像判讀、數(shù)字化測圖等帶來不便[9]。為了保證無人機影像大場景立體模型的色彩一致性,對于色彩不均衡、反差不均勻的原始無人機影像,可以選擇進行勻光勻色處理。
測區(qū)DEM 生成首先依靠嚴密的空三加密成果匹配和解算出海量加密點,其次通過點云分類技術(shù)篩選出位于地面的加密點,最后對地面點進行重采樣生成測區(qū)DEM。由于點云自動分類出的地面點含有錯點,測區(qū)DEM 不可避免地含有誤差,但實際上對大場景立體模型量測精度影響較小[8]。DEM 的分辨率宜為無人機大場景模型的50 倍,如制作0.1 m 分辨率的大場景模型,DEM 格網(wǎng)間距為5 m 較為合適[7]。
由于正射影像無法消除地物投影差,如果在投影差大的地方(如高層建筑)進行影像鑲嵌,那地物的一部分就會被裁切掉。通過對鑲嵌線進行人工編輯,使之盡量避開建筑物,讓影像在沒有地物的區(qū)域進行拼接,可以減少因鑲嵌造成的影像重要信息丟失。
2 項目實例
2.1 測區(qū)概況
項目位于山地丘陵地區(qū),屬構(gòu)造侵蝕溶蝕中低山地貌,本文研究區(qū)域面積約12 km2,測區(qū)內(nèi)相對高差最大約400 m。
2.2 數(shù)據(jù)獲取
2.2.1 航空攝影
采用大白II 無人機搭載飛思IXU-RS1000 數(shù)碼航攝儀進行測區(qū)范圍的航攝數(shù)據(jù)獲取,主要相機參數(shù)見表1。該系統(tǒng)配備GNSS RTK、減震云臺及高精度IMU,實現(xiàn)直接傳感器定向或輔助定向測量,可準確獲取航攝儀曝光時刻的外方位元素。
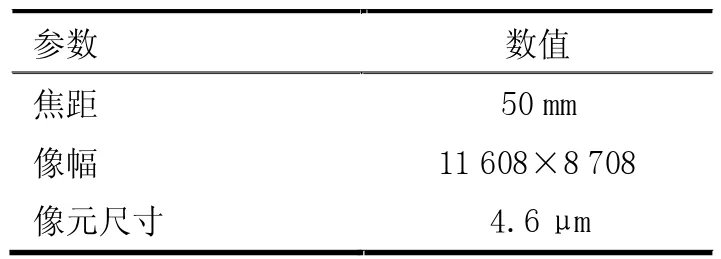
表1 飛思IXU-RS1000 數(shù)碼航攝儀主要參數(shù)
2.2.2 像控選刺
像控點布設(shè)采用區(qū)域網(wǎng)布點,像控點的密度和位置依據(jù)CH/T 3003—2021《低空數(shù)字航空攝影測量外業(yè)規(guī)范》要求確定。以正射影像和像控點布設(shè)結(jié)合圖為參考,采用網(wǎng)絡(luò)RTK 定位技術(shù)完成像控點選刺與測量。
2.3 數(shù)據(jù)處理
2.3.1 空三加密
空三加密作業(yè)采用GodWork 軟件,依次進行連接點自動提取、自由網(wǎng)平差與漸次刪點、像控點量測和光束法區(qū)域網(wǎng)平差等工作。通過漸次刪點,將內(nèi)業(yè)加密點重投影誤差控制在1.5 個像素以內(nèi),保證模型連接質(zhì)量。本項目像控點多為房角等具有一定高度的特征點,因此采用雙像立體量測,以減小控制點量測誤差。不斷優(yōu)化像控點量測位置,直至區(qū)域網(wǎng)平差后像控點平面和高程殘差滿足相應規(guī)范為止[10],最終像控點平面和高程殘差分別為0.084、0.070 m。空三加密完成后輸出Inpho 和Smart3D 格式成果,分別供DEM 和大場景制作使用。
2.3.2 影像勻光勻色
影像勻光勻色采用GeoDodging 軟件的批處理功能,處理模式選擇“整體自適應”,處理方法為“濾波法”,對航攝像片進行批量處理。利用原始影像與勻光勻色后的影像分別制作大場景立體模型,對比處理前后大場景視覺效果如圖2 所示。
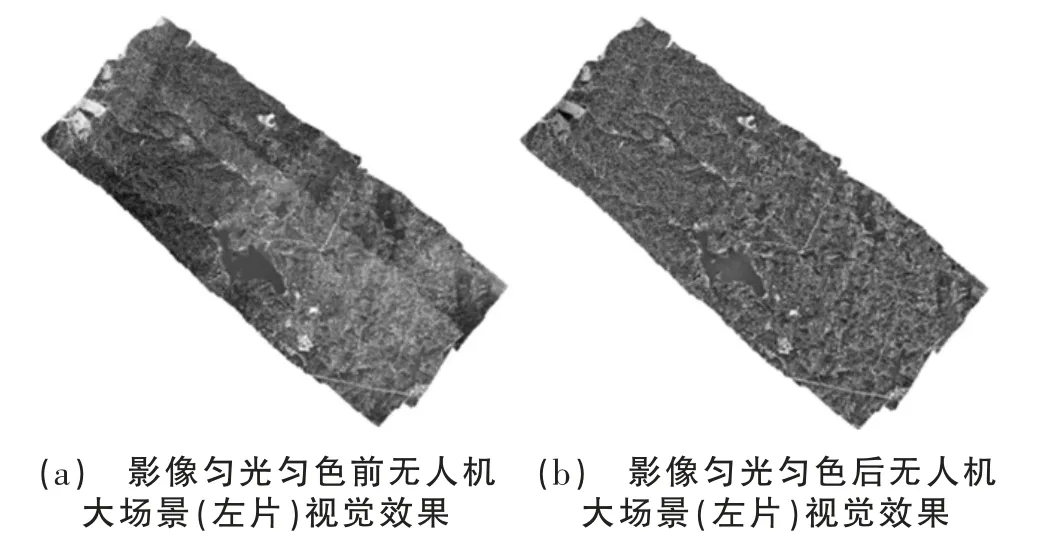
圖2 影像勻光勻色前后無人機大場景(左片)視覺效果對比
2.3.3 生成測區(qū)DEM
測區(qū)DEM 采用Inpho 軟件的Match-T DSM 模塊制作,主要考慮到該模塊具有DEM 平滑功能,使用平滑后的DEM 進行數(shù)字微分糾正可以避免正射影像出現(xiàn)扭曲拉花的現(xiàn)象,優(yōu)化大場景模型的視覺效果。在Match-T DSM 中定義格網(wǎng)大小為10 m,設(shè)置平滑選項為中度,運行后生成成果為GRD 格式,需要轉(zhuǎn)換為TIF 格式,供大場景制作使用。
2.3.4 編輯鑲嵌線
在ArcGIS 中對鑲嵌線進行編輯,以原始鑲嵌線制作的大場景左片為底圖,移動頂點位置使鑲嵌線繞避房屋等拼接有問題的區(qū)域,讓影像在草木區(qū)進行拼接,利用編輯過后的鑲嵌線重新制作大場景,恢復圖面建筑完整信息。鑲嵌線編輯前后無人機大場景模型拼接效果如圖3 所示。
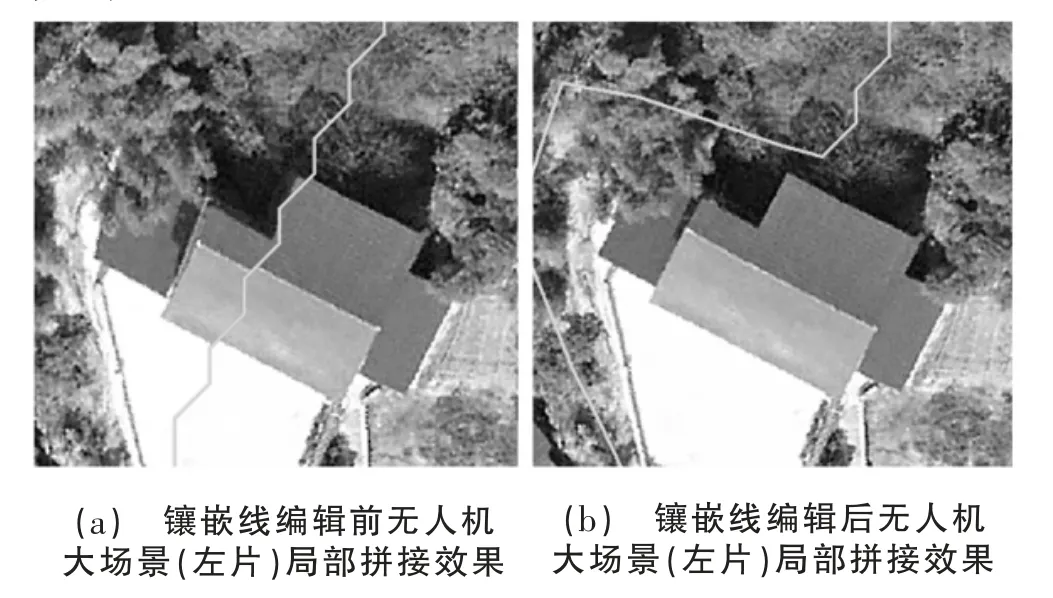
圖3 鑲嵌線編輯前后無人機大場景(左片)局部拼接效果對比
2.3.5 無人機大場景模型制作
基于前述的Smart3D 格式空三加密成果、勻光勻色影像、測區(qū)平滑DEM 和編輯后的鑲嵌線,分別在中鐵第一勘察設(shè)計院(以下簡稱“我院”)自主研發(fā)軟件SAT_UAV_APP 和ImageStereo 中進行無人機影像大場景立體模型制作與地貌地物數(shù)據(jù)采集,生成滿足項目技術(shù)質(zhì)量要求的1∶2000 比例尺地形圖,如圖4、圖5 所示。
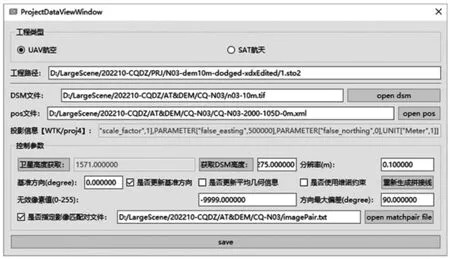
圖4 我院自主研發(fā)的大場景生成軟件SAT_UAV_APP
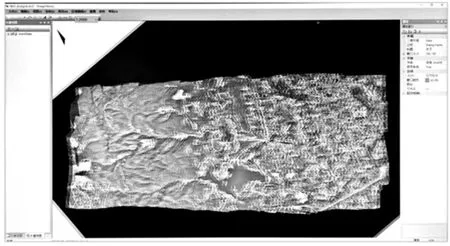
圖5 我院自主研發(fā)的大場景立體測圖軟件ImageStereo
2.4 精度分析
2.4.1 統(tǒng)計方法
完成本項目地形圖測繪工作后,對地形圖成圖精度進行驗證,以測區(qū)內(nèi)像控點RTK 測量坐標值為參考,統(tǒng)計地形圖成果中對應點位相對于參考值的偏差,并計算平面位置中誤差和高程中誤差,驗證基于無人機大場景技術(shù)測繪鐵路地形圖的數(shù)學精度,相應計算公式如下
式中:x、y、h 分別為東、北、高坐標值;mxy和mh分別為像控點平面位置中誤差和高程中誤差;Δ 為像控點各方向上大場景測量值與RTK 測量值之間的偏差;n 為測區(qū)像控點總數(shù)。
2.4.2 統(tǒng)計結(jié)果
在無人機影像大場景立體模型上測量所有像控點坐標,與RTK 測量成果進行比較,驗證無人機大場景模型測繪鐵路地形圖的平面和高程數(shù)學精度,結(jié)果如圖6 所示。
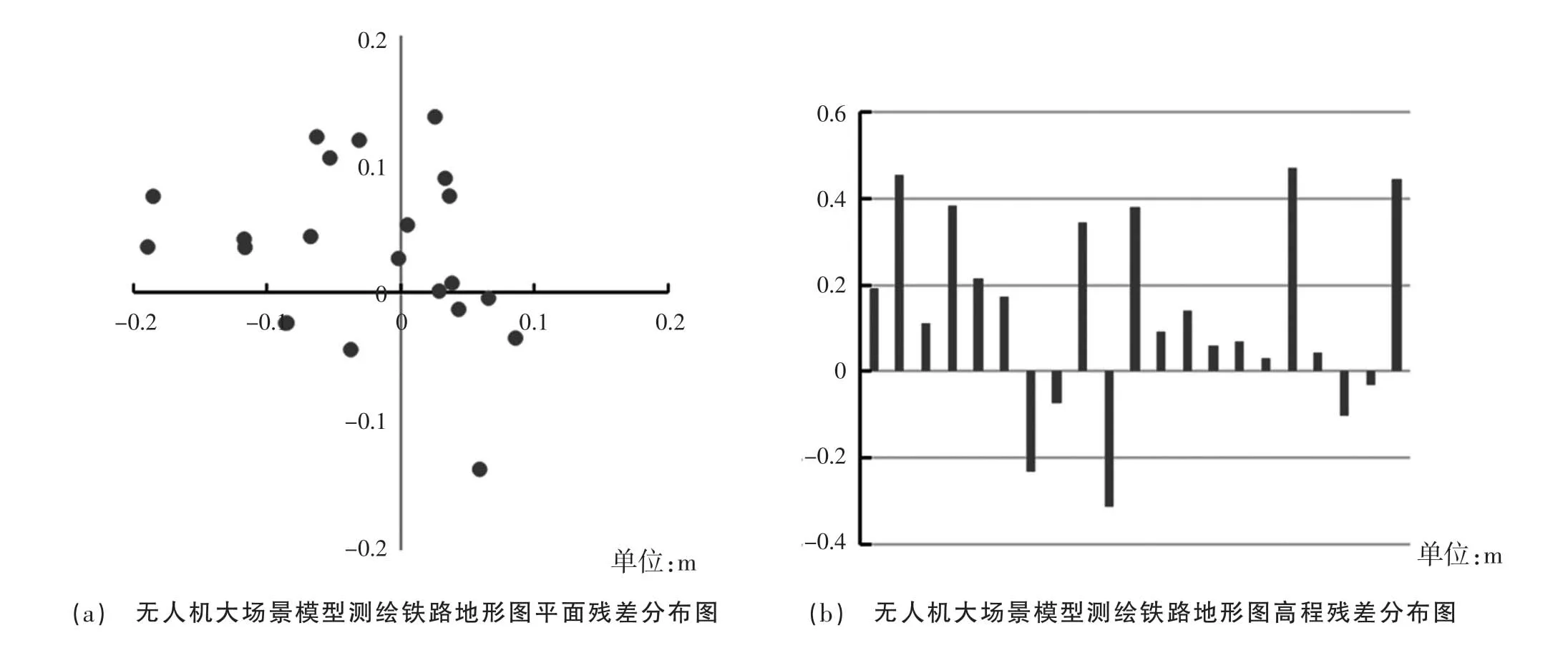
圖6 無人機大場景模型測繪鐵路地形圖平面(左)和高程(右)殘差分布圖
統(tǒng)計可得,以RTK 測量坐標值為參考,研究區(qū)域內(nèi)像控點的平面位置中誤差為0.109 m,高程中誤差為0.255 m,滿足國家標準中對于二級地形、1∶2000 比例尺地形圖地物平面中誤差0.6 m、高程中誤差0.5 m 的要求[11]。
3 結(jié)論
無人機大場景模型利用數(shù)字微分糾正鑲嵌技術(shù)彌補了單個無人機立體像對可視范圍窄小的缺點,極大地提高了三維場景的瀏覽和量測效率。本文借助某山地丘陵鐵路地形圖測繪項目,對無人機大場景模型的數(shù)學精度進行驗證,得出其滿足二級地形、1∶2000 比例尺地形圖國家標準精度要求的結(jié)論,為鐵路行業(yè)大比例尺地形圖測繪提供了新的解決方案。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
中學生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
光學精密工程(2016年6期)2016-11-07 09:07:19
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
核科學與工程(2015年4期)2015-09-26 11:59:03
