煤礦掘進工作面自動化智能化改造研究
2023-03-29 02:40:50安鵬飛
西部探礦工程 2023年1期
關鍵詞:設備
安鵬飛
(晉能控股煤業集團安全生產指揮中心,山西 大同 037000)
礦井內采用連續掘進機以及錨桿鉆機交替進行掘進配合支護作業的方式進行掘進工作面生產。循環進度依照礦井實際地質情況進行調整,通常為11m 以內。工作流程為連續掘進機割煤,通過運煤車運送至給料破碎機,給料破碎機負責將切割的煤塊破碎均勻由運煤車運送至膠帶輸送機,膠帶輸送機同地面煤倉相連接實現煤塊的傳遞,洗選加工中心負責煤塊的洗選,保證煤質滿足相關要求后裝車銷售。連續掘進機的掘進過程能夠被分成“切槽”和“采垛”兩道工序,“切槽”工序指的是連續掘進機司機根據施工圖紙要求以及地質測繪情況,在開采面調整連續掘進機的進刀位置,從巷道的一側進行掘進,切割煤層至長度滿足循環進度,之后連續掘進機退出巷道。“采垛”工序指的是連續掘進機從巷道的另一側開始切割剩余煤壁,直到巷道的寬度以及循環進度達到要求進而停止連續掘進作業,調轉方向對巷道的另一側進行煤壁截割,直到截割的寬度以及循環次數滿足相關需求。
1 掘進工作面自動化發展現狀與改進方向
1.1 掘進工作面自動化發展現狀
現如今,大多數煤礦都引進了多種自動化設備輔助開采作業,礦井整體自動化水平顯著提升,但是掘進工作面并未有實質上的改變,自動化程度較低。主要是因為掘進工作面對于長度寬度和循環進度都有嚴格要求,使得工作設備排布分散、間距較大,并且需要根據掘進進度不斷進行位置的搬移,難以通過從根本上實現自動化控制。
隨著掘進工作的開展,掘進工作面不斷深入,工作中所需的膠帶輸送機數量也在不斷增加,每部膠帶輸送機都需要有司機操控,保證膠帶輸送機的模式切換以及設備周邊環境的監測;一旦發現掘進工作面的深度達到1km,則說明局部通風機以及配電硐室和工作面三者間的距離超過要求,為了保證工作安全,需要安排專人巡視局部通風機以及配電硐室,保證局部通風機的實時監測以及模式切換,保證配電設備的維護修理。因此,現如今多數企業都采取遠程監控的形式進行設備的監測,把膠帶輸送機、局部通風機和配電設備放置在同一監控系統中,實現集中監控,提升監控效率。
掘進工作面的生產過程是由連續掘進機在巷道內掘進,切割的煤塊由梭車運送至給料破碎機,給料破碎機將煤塊破碎至指定大小后傳輸至膠帶輸送機處,由膠帶輸送機帶動煤塊到達指定煤倉中。當前煤礦企業的自動化難點主要集中在:連續掘進機難以實現遠程控制、無人駕駛梭車技術為完全落實給料破碎機和梭車二者間難以形成有效的聯動配合,上述操作大都通過人工的方式進行。
1.2 掘進工作面自動化改進方向
要提升礦井的智能化現代化程度,需要從以下方面進行工作:安全水平的提升、工作效率的提升以及經濟成本的控制等,達到減員增效的目標,掘進工作面自動化程度的提升也需要上述方面開展工作。第一,充分使用計算機、攝像頭以及傳感器等監測反饋設備代替當前低技能的人工崗位,實現輸送膠帶機、局部通風機以及配電設備的集中監控,實現減員增效的要求。第二,提升給料破碎機以及梭車的自動化程度,通過無人駕駛去梭車實現給料破碎機、梭車和連續掘進機三者間的聯動作業,實現減員節能的要求。第三,加強連續掘進機的智能化水平,對現有功能進行完善,集成自主導航以及掘進控制等相關功能,連續掘進機司機可以通過遠程操控的方式調整機器在巷道中的工作狀態,使得連續掘進機能夠適應各種復雜的地質條件,司機也無需在惡劣的環境中工作,保證了司機的工作安全[1]。
2 掘進工作面自動化改造方案
2.1 連續掘進機自動化改造
2.1.1 連掘機導航
激光駕束制導也就是通過導航設備中集成的激光接收器,持續不斷地向前方發射激光,設備根據激光的反射結果進行運行方向的調整。由于激光本身具有方向誤差小、散角小以及制導性能優良等特點,激光制導能夠有效降低制導誤差,提升煤層的截割質量。在連續掘進機的“切槽”以及“采垛”兩道工序的進刀位置都配備激光發射器,連續掘進機自身配備激光導航裝置,司機通過模式的切換根據需要進行“切槽”或“采垛”進刀位置的調整,連續掘進機調用該模式下存儲的記憶進行自動割煤。目前連續掘進機的動力大都由變頻器驅動行走牽引電機提供,設備相互之間的信號轉換存在一定難度,需要先將連續掘進機的偏移量轉化成調頻信號,在經由PID 控制技術反饋給操作系統從而達到糾正偏移的目的。加設雙軸水平傾角傳感器,能夠對連續掘進機的各個方位進行全面的水平傾斜角度實時監測,配備的控制計算機對機身水平傾斜量和激光導航偏移量進行實時監測,如果在工作過程中連續掘進機出現超偏的情況,控制設備能夠及時向連續掘進機發出超偏信號,連續掘進機收到信號后在一定時間內自動停止工作,相關人員進入現場進行故障處理。
2.1.2 連掘機記憶割煤
記憶割煤是當前絕大多數煤礦為了提升礦井開采自動化程度常用的一種手段。煤礦礦井自身的地質條件通常較為復雜,僅僅依靠傳感器無法實現自動化生產,采用人工干預下輔助傳感器的方式能夠達到記憶割煤的目的,完成減員增效的既定目標。如圖1所示,依照連掘機生產工藝將記憶割煤的流程歸為以下5個工步。第1步,根據巷道高度計算出連續掘進機的起截割頭參數,操控截割頭提升至選定高度;第2步,根據煤礦實際地質情況確定適當的進刀距離,由連續掘進機進行進刀;第3步,選取連續掘進機截割頭下降高度參數,連續掘進機降截割頭割煤;第4步,選取進刀拉底距離參數,連續掘進機進刀拉底;第5步,退機,退機距離同第4 步拉底距離保持一致。上述5 個工步為循環掘進的一個流程,連續掘進機的最遠無支護掘進距離能夠根據巷道的實際長度所確定,用這一距離和工步2的參數相除即可得到單次記憶割煤的循環次數,連續掘進機的循環數達到該值后停止作業,等待人工干預。

圖1 連掘機自動割煤工步
連掘機在記憶割煤模式下工作需要同梭車聯動,因此上述工步在梭車運煤過程中需要停止避免發生干涉,在程序編寫過程中需要將上述因素考慮在內,通過程序設定實現連掘機記憶割煤的連續運行。
2.2 梭車無人駕駛改造
2.2.1 梭車自動行駛
自主導航領域中常見技術為基于預設磁軌跡的磁導航技術,這種技術通常用于短距離無軌設備導航,能夠實現自主導航設備的預定運行路線導航和定位。磁導航的優勢在于抗干擾能力較強、結構簡單、成本較低以及適用場合廣泛。磁導航感知系統主要組成部分包括:地標傳感器、多點位磁導航傳感器和磁條,所以,為了實現運行過程中的傳感器感應,需要在指定位置布置磁條軌道以及磁釘,同時在梭車機身指定位置布置磁導航傳感器,梭車運行過程中不間斷地獲取磁場的相關參數和同磁軌道預設位置的偏移量,通過信號轉換的方式將偏移量轉換為電信號,根據偏移量進行梭車轉向調節;磁導航傳感器感知磁釘極性使得梭車能夠依照既定的路線行進[2]。
定量閥屬于新型閥體的一種,其特點為能夠實現定時、定量注油、抗干擾能力強以及自動化程度高等。在梭車上配備定量閥,使用電磁控制的方式控制定量閥的啟停。在梭車運行過程中,如果發生偏移量超出等現象,即刻向定量閥發送指令達到糾正偏移的目的,保證梭車依照預定路線運行。
2.2.2 梭車自動接煤
梭車前端安裝限位磁鐵,連掘機的刮板運輸機末端安裝磁信號接收器,梭車同連掘機間距到達一定范圍內,連掘機接受到磁信號,啟動刮板運輸機準備裝煤;梭車料斗上部安裝料位傳感器,煤堆到達指定高度后啟動梭車的刮板運輸機,煤堆高度下降后停止;梭車刮板運輸機卸料部安裝料位傳感器,煤堆觸發傳感器后刮板運輸機停止工作,梭車開始退機;連掘機無法收到梭車信號進而停止裝煤工作。
2.2.3 梭車自動卸煤
給料破碎機料斗內設置有限位磁鐵,同時在梭車刮板運輸機尾部設置磁信號接收器,梭車刮板運輸機控制回路安裝時間繼電器,磁信號接收器接收到破碎機料斗的信號后梭車停止退機,刮板運輸機開始卸煤,通過刮板輸送機的卸煤速度和梭車的裝載量得出卸煤時間,根據卸煤時間進行繼電器延時設置,到達指定時間后刮板輸送機停止工作,梭車返回。
2.3 給料破碎機自動化改造
由于梭車的運煤過程是無固定周期的,因此掘進工作面的煤流屬于非連續性煤流,如果不對刮板輸送機的工作頻率進行一定的控制,則會造成能源的浪費以及經濟成本的提升。因此使用電磁閥進行刮板運輸機的控制,通過電氣控制的形式,加設超聲波探測器對于梭車和給料破碎機間的間距進行監測,一旦發現二者間的間距小于1m,通過電磁閥控制給料破碎機工作,一旦二者間的間距超過1m,通過延時控制的方式使得電磁閥電路在3min 后切斷,刮板輸送機停止工作[3]。
2.4 掘進工作面網絡架構
膠帶機設備以及配電硐室設備根據各自的通信協議接入數據采集箱,數據采集箱通過以太網和交換機相連接,連掘機和梭車的相關參數通過無線網絡進入交換機,集控計算機通過交換機實現同設備間的通信,使得整個掘進工作面網絡構架形成;交換機通過井下工業環網實現掘進工作面和地面之間數據的傳遞,使得遠程指揮中心能夠實時獲取掘進面的情況,具體結構如圖2所示。
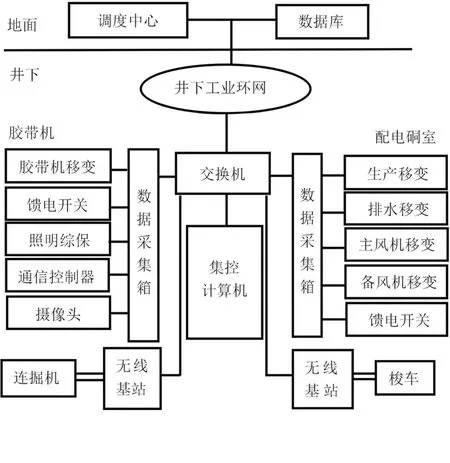
圖2 掘進工作面網絡拓撲圖
3 結語
長期以來,煤礦行業都被冠以“高危”、“艱苦”、“落后”等詞匯,因此要使得礦井從業人員的工作環境有所改善,掘進工作面自動化發展是必不可少的。未來連掘機司機能夠通過地面工作室中的VR 視頻監控技術進行設備的控制,調度指揮人員同連掘機司機距離較近,二者間溝通的實時性有所保障,命令的執行效率顯著提升,加之大數據以及人工智能等技術的應用,煤礦最終將會實現全自動生產,切實保障礦井工作人員的安全。提升掘進工作面的自動化程度,能夠減少礦井內部所需的工作人員數量,使得采煤機司機以及梭車司機等脫離惡劣的工作環境,保障相關人員的工作安全。通過設備聯動運行的方式,減少了設備不必要的能耗,節約了礦井的生產升本。未來煤礦企業將會全面普及智慧礦山的生產模式,全自動無人化的礦山生產將會全面覆蓋,這一目標的實現需要以掘進工作面的自動化程度提升為前提,掘進工作面自動化程度的提升將會給智慧礦山模式的推廣培養相應的技術人才,為智慧礦山的運營管理提供經驗參考。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
當代工人(2020年13期)2020-09-27 23:04:20
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
電子制作(2018年10期)2018-08-04 03:24:48
家庭影院技術(2017年11期)2017-12-20 08:10:57
工業設計(2016年12期)2016-04-16 02:52:00
IT時代周刊(2015年8期)2015-11-11 05:50:37
汽車維修與保養(2015年1期)2015-04-17 03:25:28
設備管理與維修(2015年12期)2015-04-09 06:57:00
