可穿戴式三維激光掃描系統在大比例尺測圖中的應用
2023-04-06 10:10:48邱世聰陳遠鴻汪國宏雷遠建
北京測繪 2023年2期
邱世聰 陳遠鴻 汪國宏 雷遠建
(深圳市勘察研究院有限公司, 廣東 深圳 518000)
0 引言
隨著同步定位與地圖構建(simultaneous localization and mapping,SLAM)技術的快速發展,背包式的三維(three-dimensional,3D)激光掃描系統日趨成熟,從背包式發展到可穿戴式,無須全球導航衛星系統(global navigation satellite system,GNSS)的支持就能實時獲取周邊地物的高精度三維點云數據及影像信息[1]。由于無人機航空攝影測量具有效率高、生產成本低等優點,同時也存在成圖精度相對較低、受環境影響較大、空中飛行安全性低等缺點,目前在實際大比例尺測圖生產中,主要還是以GNSS-RTK測量和全站儀全野外數據采集等傳統測量手段為主,其中,RTK是指實時動態載波相位差分技術(real-time kinematic)。傳統測量對儀器、人員等方面要求較高,同時還受地形條件、通視條件、衛星信號等外界因素影響較大,費時費力,通過移動三維激光掃描系統快速獲取三維空間信息能大大減少外業工作量,獲取高精度的成果的同時提高了生產效率[2-3]。可穿戴式三維激光掃描系統不同于機載、車載測量系統,由外業數據采集人員承載進行測量,可應對復雜的測量環境[4]。三維激光掃描系統主要分為激光測距系統、控制系統、顯示系統、數據傳輸系統和電源供應系統5部分構成,其核心是激光發射器、激光反射鏡、激光自適應聚焦控制單元、電荷耦合器件(charge coupled device, CCD)技術和光機電自動傳感裝置[5]。
可穿戴式三維激光掃描系統作為新興的測繪設備,目前在國內外的應用研究還處于起步階段,相關的應用研究較少。李照永等[2]研究了背包式三維激光掃描系統的pure SlAM和fused SLAM作業方法共4種模式在軌道交通工程竣工測量中的應用,分析出實現快速的、高精度的點云數據獲取的最佳作業方法及模式為pure SlAM。楊銘[6]研究了3種背包式掃描儀數據采集精度和效率。
本文利用NavVis VLX可穿戴式三維激光掃描系統對某公寓小區進行比例尺為1∶500的測圖實驗,并將三維激光掃描系統測圖成果與全站儀測圖成果進行對比分析。
1 可穿戴式移動三維激光掃描系統
NavVis VLX是一款可穿戴式移動三維激光掃描系統,VLX通過兩個多層激光雷達和四個工業相機快速捕獲360°高分辨率圖像和高精度點云,如圖1所示。它使用NavVis專有的6D及時定位和地圖創建(SLAM)技術進行高質量的現實空間數據捕獲,緊湊的設計使其非常適合在有障礙物和不平的地面以及狹窄空間中使用。在實際工程應用中,需將采集到的原始點云數據進行整體配準轉換到工程坐標系中以提高數據精度[7-8],此系統具有添加控制點功能,控制點可以提高數據的準確性,實現多個數據集的自動拼接,并能夠將點云坐標自動轉換到測量工程測量坐標系下。
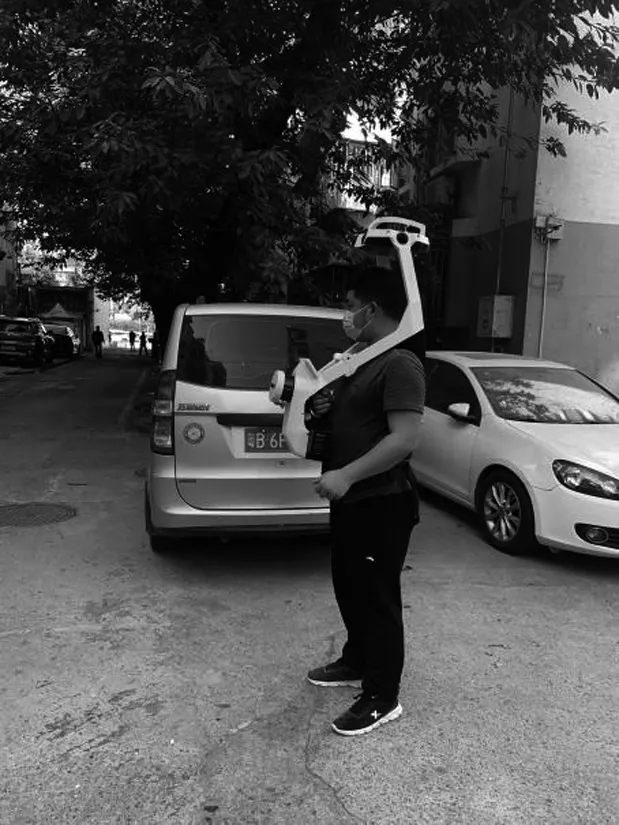
圖1 NavVis VLX
2 數據采集及內業數據處理
2.1 試驗區選擇
本文選取深圳市某小區,此小區涵蓋常規大比例尺地形圖需測的大部分地理要素,具有一定的代表性[9]。
2.2 控制測量
本文利用深圳市北斗地基增強系統(SZBDCORS)建立一級首級控制網,每隔25 m加密一個控制點,采用全站儀對加密控制點進行施測,得到各控制點的高精度三維坐標。
2.3 外業數據采集
作業前校準加速度計,掃描時以緩慢而穩定的速度行走,并保證VLX盡可能保持直立,避免突然或急促的動作,盡量距離被掃描地物1~10 m以獲取最佳質量的點云。由于整個點云數據量較大,在立體采集的過程中,特別是桿狀地物會相互遮擋,因此,將桿狀地物、線狀地物及面狀地物分開采集,可以保證地物完整采集[10]。對于樹林等不易到達的區域及需重點掃描的地物,加長數據采集時間,繞著重點地物多次進行掃描,確保獲得完整的點云數據。經過控制點,通過掃描儀的添加錨點功能進行控制點的添加。
2.4 內業數據處理及數字成圖
將外業掃描數據導出,采用配套軟件SiteMaker對掃描數據做預處理,處理內容包括解算點云、去噪、點云著色、生成全景照片,所有數據集通過控制點自動拼接,點云處理成果如圖2所示。采用Autodesk ReCap將LAS點云格式轉換成南方CASS 10.1支持的PCG點云格式,利用CASS 10.1進行數字成圖。

圖2 彩色點云數據
3 精度對比分析
隨機選取均勻分布、特征明顯的特征點、特征邊,并采用高精度全站儀進行實測[17],將掃描儀成果與全站儀實測成果精度對比分析。
選取35個點位進行平面點位精度分析,經計算最小較差為1.5 cm,最大較差為12.5 cm,平面點位中誤差為6.5 cm,平面點位較差分布如圖3所示。

圖3 平面點位較差分布
選取40個高程點進行高程精度分析,經計算最小較差為0.8 cm,最大較差為11.2 cm,高程中誤差為7.7 cm,高程較差分布如圖4所示。
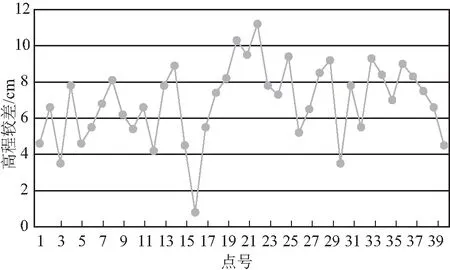
圖4 高程較差分布
選取30條邊進行邊長精度分析,經計算最小較差為1.3 cm,最大較差為8.6 cm,邊長中誤差為5.5 cm,高程較差分布如圖5所示。

圖5 邊長較差分布
4 結束語
本文通過NavVis VLX可穿戴式三維激光掃描系統進行1∶500比例尺測圖,并對其測量精度進行了驗證,由上述分析可以看出,平面點位精度、高程精度、邊長精度均符合城市測量規范要求,完全可以運用到大比例尺測圖項目中。目前內業成圖自動化程度較低,對于地物的自動特征識別、提高內業成圖自動化程度的算法有待進一步研究。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:37:18
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
工程與建設(2019年3期)2019-10-10 01:40:18
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
電測與儀表(2016年9期)2016-04-12 00:29:52
