基于機(jī)載LiDAR點(diǎn)云的電力線提取與三維重建
2023-04-06 10:10:50宋向榮
北京測繪 2023年2期
宋向榮
(中交第三航務(wù)工程局有限公司寧波分公司, 浙江 杭州 315200)
0 引言
近年來,以電力行業(yè)為代表的我國各類民生類基礎(chǔ)設(shè)施也在不斷建設(shè),規(guī)模日益壯大。為了保障人民用電供應(yīng),針對電網(wǎng)結(jié)構(gòu)的電力線周期性安全巡檢具有重要意義。傳統(tǒng)的電力線周期性安全巡檢主要有兩種方式,一是通過地面人員肉眼觀測,二是搭載直升機(jī)平臺通過設(shè)備進(jìn)行觀測[1-2]。傳統(tǒng)的電力線周期性安全巡檢存在成本高、作業(yè)難度大、巡檢結(jié)果不可靠等現(xiàn)實(shí)性問題、機(jī)載激光(light detection and ranging,LiDAR)系統(tǒng)作為一種新型的空間數(shù)據(jù)采集手段,集成了激光測距系統(tǒng)等多種子系統(tǒng)[3],能夠在短時間內(nèi)快捷、高效獲取目標(biāo)地物表面高精度三維坐標(biāo)信息[4],對于復(fù)雜區(qū)域電力線巡檢的優(yōu)勢巨大。然而,電力線周圍通常生長高大樹木以及人工建設(shè)建、構(gòu)筑物,機(jī)載LiDAR點(diǎn)云數(shù)據(jù)中包含上述地物點(diǎn)云,若要實(shí)現(xiàn)基于機(jī)載LiDAR掃描技術(shù)的電力線巡檢,研究如何區(qū)分電力線點(diǎn)與其他地物點(diǎn)具有重要的現(xiàn)實(shí)意義。
針對基于機(jī)載LiDAR點(diǎn)云數(shù)據(jù)的電力線提取與三維重建,眾多學(xué)者進(jìn)行了研究。程宇航等[5]利用深度學(xué)習(xí)實(shí)現(xiàn)電力線提取,但是該方法使用訓(xùn)練樣本少、訓(xùn)練過程復(fù)雜,提取效果一般;朱依民等[6]通過局部高程直方圖模式進(jìn)行塔桿點(diǎn)、電力線點(diǎn)分類,但是該方法受區(qū)域大小影響大,具有較大的局限性;蔡岐彬等[7]通過高程閾值分割算法實(shí)現(xiàn)電力線點(diǎn)、其他地物點(diǎn)分類,避免單一高程閾值對分類結(jié)果的影響,但是算法復(fù)雜性較大;考慮地形起伏的特征的自適應(yīng)的點(diǎn)云濾波方法,在濾波結(jié)果的基礎(chǔ)上利用維度特征剔除非電力線點(diǎn),再基于Hough變換實(shí)現(xiàn)單根電力線提取的方法在提取電力線點(diǎn)過程中涉及圖像轉(zhuǎn)換,一方面降低分辨率,另一方面無法避免噪聲對提取結(jié)果的影響;MCLAUGHLIN R A[8]結(jié)合統(tǒng)計分析法和電力線的懸線模型實(shí)現(xiàn)電力線三維重建,但是再確定電力線走向時會受粗差點(diǎn)影響;BAMIGBOLA O M等[9]基于點(diǎn)云的三維尺度鄰域特征使用支持向量機(jī)對電力線走廊點(diǎn)云進(jìn)行分類,但是該方法需要過多的人工干預(yù),且方法的分類準(zhǔn)確率、魯棒性都較低。
本文根據(jù)電力線點(diǎn)在機(jī)載激光LiDAR點(diǎn)云數(shù)據(jù)中與其他地物點(diǎn)分布差異性,提出一種高效、高精度電力線點(diǎn)提取與三維重建方法,通過電力線點(diǎn)粗提取、單根電力線點(diǎn)精提取以及電力線三維重建這三個步驟實(shí)現(xiàn)本文技術(shù)方法。首先,使用改進(jìn)的點(diǎn)云濾波方法對原始機(jī)載LiDAR點(diǎn)云進(jìn)行濾波處理,其次通過改進(jìn)幾何特征計算方法提取電力線點(diǎn)得到電力線粗提取成果,并引入密度聚類原理精確提取單根電力線,最后通過最小二乘原理實(shí)現(xiàn)電力線三維重建,構(gòu)建完整的電力線提取與三維重建流程。
1 技術(shù)流程
1.1 點(diǎn)云數(shù)據(jù)預(yù)處理
對于原始無人機(jī)載LiDAR點(diǎn)云數(shù)據(jù),為了避免噪聲點(diǎn)、多次回波現(xiàn)象產(chǎn)生多余點(diǎn)對后續(xù)電力線點(diǎn)提取產(chǎn)生影響,需要對原始機(jī)載LiDAR點(diǎn)云數(shù)據(jù)進(jìn)行處理,包括噪聲點(diǎn)剔除與回波次數(shù)判斷[10-11]。機(jī)載激光LiDAR掃描系統(tǒng)作業(yè)時,由于空氣中存在懸浮點(diǎn)、飛鳥等,造成掃描點(diǎn)云數(shù)據(jù)中包含噪聲點(diǎn),本文結(jié)合高程分布直方圖與k維樹的方法剔除噪聲點(diǎn)。激光LiDAR掃描系統(tǒng)進(jìn)行數(shù)據(jù)采集時,由于激光脈沖具有穿透力,對于多類地物會產(chǎn)生多次回波現(xiàn)象,可根據(jù)回波次數(shù)的差異性剔除部分非地面點(diǎn)。
1.2 改進(jìn)電力線點(diǎn)云濾波算法
目前常用的機(jī)載LiDAR點(diǎn)云濾波算法主要有基于曲面擬合、基于形態(tài)學(xué)等濾波算法[12-13],本文考慮基于曲面擬合的點(diǎn)云濾波算法在地形起伏較大區(qū)域具有良好性能的優(yōu)勢,將該濾波算法用于本文機(jī)載LiDAR點(diǎn)云濾波中,同時為進(jìn)一步提高點(diǎn)云濾波效果,在該算法的基礎(chǔ)上引入格網(wǎng)劃分的概念,提出一種改進(jìn)曲面擬合濾波算法,技術(shù)路線如圖1所示。
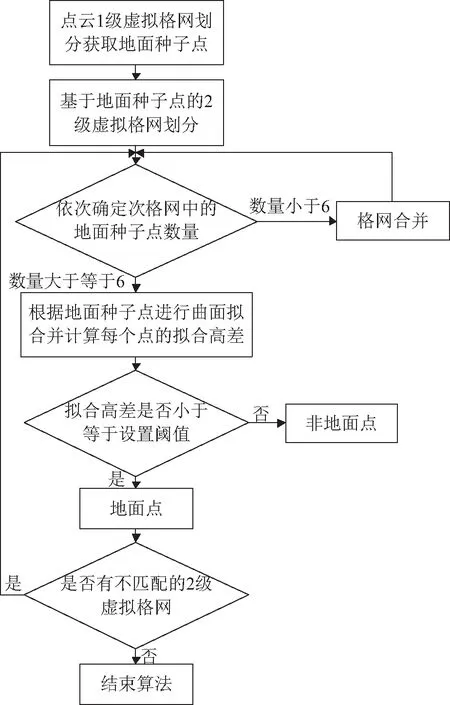
圖1 改進(jìn)曲面擬合濾波算法技術(shù)路線
具體步驟為:
1)將點(diǎn)云場景中建筑物最大尺寸作為格網(wǎng)大小進(jìn)行1級虛擬格網(wǎng)劃分,取各格網(wǎng)內(nèi)最低點(diǎn)為地面種子點(diǎn)。
2)對地面種子點(diǎn)進(jìn)行2級虛擬格網(wǎng)劃分,統(tǒng)計落入每個格網(wǎng)內(nèi)地面種子點(diǎn)數(shù),若地面種子點(diǎn)個數(shù)不少于6,則進(jìn)入步驟4),若地面種子點(diǎn)個數(shù)小于6,則進(jìn)入步驟3)。
3)將當(dāng)前格網(wǎng)內(nèi)種子點(diǎn)與下一格網(wǎng)內(nèi)種子點(diǎn)合并,直至地面種子點(diǎn)個數(shù)不少于6。
4)利用地面種子點(diǎn)進(jìn)行最小二乘曲面擬合,計算待判斷點(diǎn)擬合高程與實(shí)際高程差值得到擬合高程差。
5)設(shè)置高差閾值,若擬合高程差小于閾值,標(biāo)記待判斷點(diǎn)為地面點(diǎn)。
1.3 電力線點(diǎn)云提取
完成地面點(diǎn)濾波處理后,得到包含電力線點(diǎn)以及部分塔桿點(diǎn)與高植被點(diǎn)的非地面點(diǎn),其中高植被點(diǎn)呈不規(guī)則散亂點(diǎn)分布,桿塔點(diǎn)局部范圍內(nèi)呈規(guī)則面狀分布,根據(jù)電力線點(diǎn)、高植被點(diǎn)以及桿塔點(diǎn)的空間分布特征差異進(jìn)行電力線點(diǎn)提取。對于激光點(diǎn)的空間分布特征,可通過鄰域內(nèi)點(diǎn)集協(xié)方差陣對應(yīng)特征值λ1、λ2、λ3進(jìn)行表現(xiàn),如果滿足λ1?λ2?λ3,表明目標(biāo)點(diǎn)為植被等分布不規(guī)則的點(diǎn);如果滿足λ1?λ2≥λ3,表明目標(biāo)點(diǎn)為桿塔或道路等呈面狀分布的點(diǎn);如果滿足λ1≥λ2?λ3,表明目標(biāo)點(diǎn)為道路邊線或電力線等呈線性分布的點(diǎn)。
受點(diǎn)云分布密度影響,若通過固定鄰域半徑進(jìn)行特征估計增加點(diǎn)云分割誤差,本文引入熵函數(shù)最小化原則[14],通過計算激光點(diǎn)特征值并確定激光點(diǎn)3種維數(shù)的概率維度特征
(1)
根據(jù)香農(nóng)熵定義得到激光點(diǎn)鄰域包含信息為[15]
Ef=-a1DLn(a1D)-a2DLn(a2D)-a3DLn(a3D)
(2)
式中,Ef表示該激光點(diǎn)鄰域所含信息,在Ef最小值時取得最佳鄰域半徑。計算特征值以及判斷激光點(diǎn)特征值之間的相互關(guān)系進(jìn)行電力線提取。其中半徑增量、鄰域半徑區(qū)間與計算機(jī)性能與點(diǎn)云數(shù)據(jù)量有關(guān)。
1.4 單根電力線分離
密度聚類算法(density-based spatial clustering of application with noise,DBSCAN)是一種高密度聯(lián)通區(qū)域聚類方法[16],該算法能夠在噪聲分布與數(shù)量未知的情況下實(shí)現(xiàn)任意形狀簇類的搜索,高算法的主要定義為:①輸入?yún)?shù)一pMinPts為密度閾值,輸入?yún)?shù)二rEps為球鄰域半徑。②對比當(dāng)前點(diǎn)rEps鄰域范圍內(nèi)包含點(diǎn)的數(shù)量與pMinPts判斷當(dāng)前點(diǎn)屬性,點(diǎn)屬性包括噪聲點(diǎn)、邊界點(diǎn)、核心點(diǎn)。③密度可達(dá),若p為核心點(diǎn)且點(diǎn)p的rEps鄰域中包含點(diǎn)q,稱q為p直接密度可達(dá)。
DBSCAN算法原理如圖2所示,當(dāng)pMinPts為3、rEps為4時,黑色填充圓為噪聲點(diǎn)、白色填充圓為邊界點(diǎn)、灰色填充圓為核心點(diǎn)。
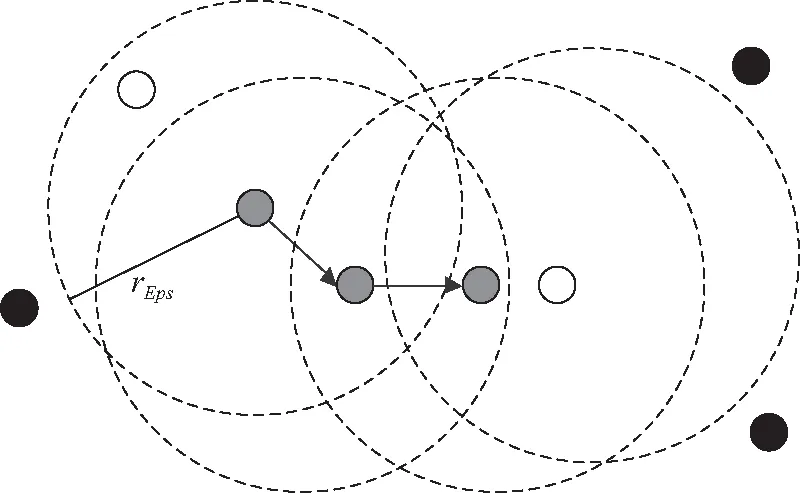
圖2 DBSCAN算法原理圖
DBSCAN算法通過判斷核心點(diǎn)實(shí)現(xiàn)簇列的搜索,將滿足條件的點(diǎn)不斷加入簇列中,基本描述如圖3所示。

圖3 DBSCAN算法流程圖
DBSCAN算法的具體實(shí)現(xiàn)步驟為:
1)初始化參數(shù)pMinPts、rEps,將點(diǎn)云Flag屬性賦值為unvisited,CCluster賦值為0。
2)選擇某點(diǎn)p并確定其Flag值,若Flag值為unvisited,判斷其是否為核心點(diǎn),若Flag值為visited,選擇下一點(diǎn)。
3)對比目標(biāo)點(diǎn)rEps鄰域內(nèi)對象點(diǎn)數(shù)與閾值pMinPts大小,若小于閾值pMinPts,則目標(biāo)點(diǎn)為噪聲點(diǎn),若大于閾值pMinPts,則目標(biāo)點(diǎn)為核心點(diǎn),通過目標(biāo)點(diǎn)密度可達(dá)點(diǎn)建立密度連通集并將點(diǎn)集內(nèi)點(diǎn)Flag賦值為visited。
4)重復(fù)上述步驟直至所有點(diǎn)Flag值為visited。
5)聚類完成并輸出簇集合。
完成聚類后,原始電力線點(diǎn)云被分類為若干根獨(dú)立電力線點(diǎn)云。
1.5 電力線三維重建
電力線三維重建即通過矢量形式表現(xiàn)電力線點(diǎn),利用拋物線方程可近似地表示電力線數(shù)學(xué)模型[17],常用的擬合方法有RANSAC算法擬合、最小二乘原理擬合等[18-19],其中RANSAC算法擬合需消耗大量內(nèi)存,擬合結(jié)果具有較大的偶然性;最小二乘原理擬合算法擬合結(jié)果穩(wěn)定性高,本文選擇使用該方法進(jìn)行擬合,實(shí)現(xiàn)電力線三維重建。
空間直線的點(diǎn)向式方程為
(3)
式(3)中,x0、y0、z0為直線已知點(diǎn);m、n、p為直線方向向量。
通過空間點(diǎn)Q1(x1,y1,z1)與空間點(diǎn)Q2(x2,y2,z2)組成空間直線,任意一點(diǎn)P(x,y,z)與該空間直線的距離為
(4)
式(3)可轉(zhuǎn)換形式為
(5)


(6)
通過式(4)可以將空間直線投影至XOY、YOZ、XOZ平面中,將6個幾何參數(shù)轉(zhuǎn)換為4個幾何參數(shù)。

(7)

(8)

(9)
令
(10)
那么式(9)可簡化為
MMTA=MX,MMTB=MY
(11)
式中,A=[ab]T;X=[x1…xm]T;B=[cd]T;Y=[y1…ym]T。
2 實(shí)驗(yàn)驗(yàn)證
2.1 實(shí)驗(yàn)數(shù)據(jù)
為了檢驗(yàn)本文提出基于機(jī)載LiDAR點(diǎn)云數(shù)據(jù)的電力線點(diǎn)提取與重建方法,選擇寧波市某高壓交流輸變電工程中部分實(shí)測機(jī)載LiDAR點(diǎn)云數(shù)據(jù)進(jìn)行實(shí)驗(yàn)。實(shí)驗(yàn)數(shù)據(jù)由D300L機(jī)載激光LiDAR系統(tǒng)采集得到,該系統(tǒng)搭載Riegl mini VUX-1UAV激光LiDAR掃描儀,水平分辨率為0.05°~0.5°,測量距離為250 m。本文實(shí)驗(yàn)數(shù)據(jù)共包括6個電塔,28根電力線,同時包含植被、樹木等地物,如圖4所示。

圖4 原始點(diǎn)云數(shù)據(jù)
2.2 實(shí)驗(yàn)結(jié)果與分析
對預(yù)處理后點(diǎn)云數(shù)據(jù)進(jìn)行兩次濾波,改進(jìn)曲面擬合濾波算法濾波過程中,設(shè)置1級格網(wǎng)邊長為10.5 m,根據(jù)地面種子點(diǎn)數(shù)以及式(1)設(shè)置2級格網(wǎng)邊長為26 m,設(shè)置高差閾值為0.5 m,經(jīng)兩次濾波得到非地面點(diǎn)如圖5所示。
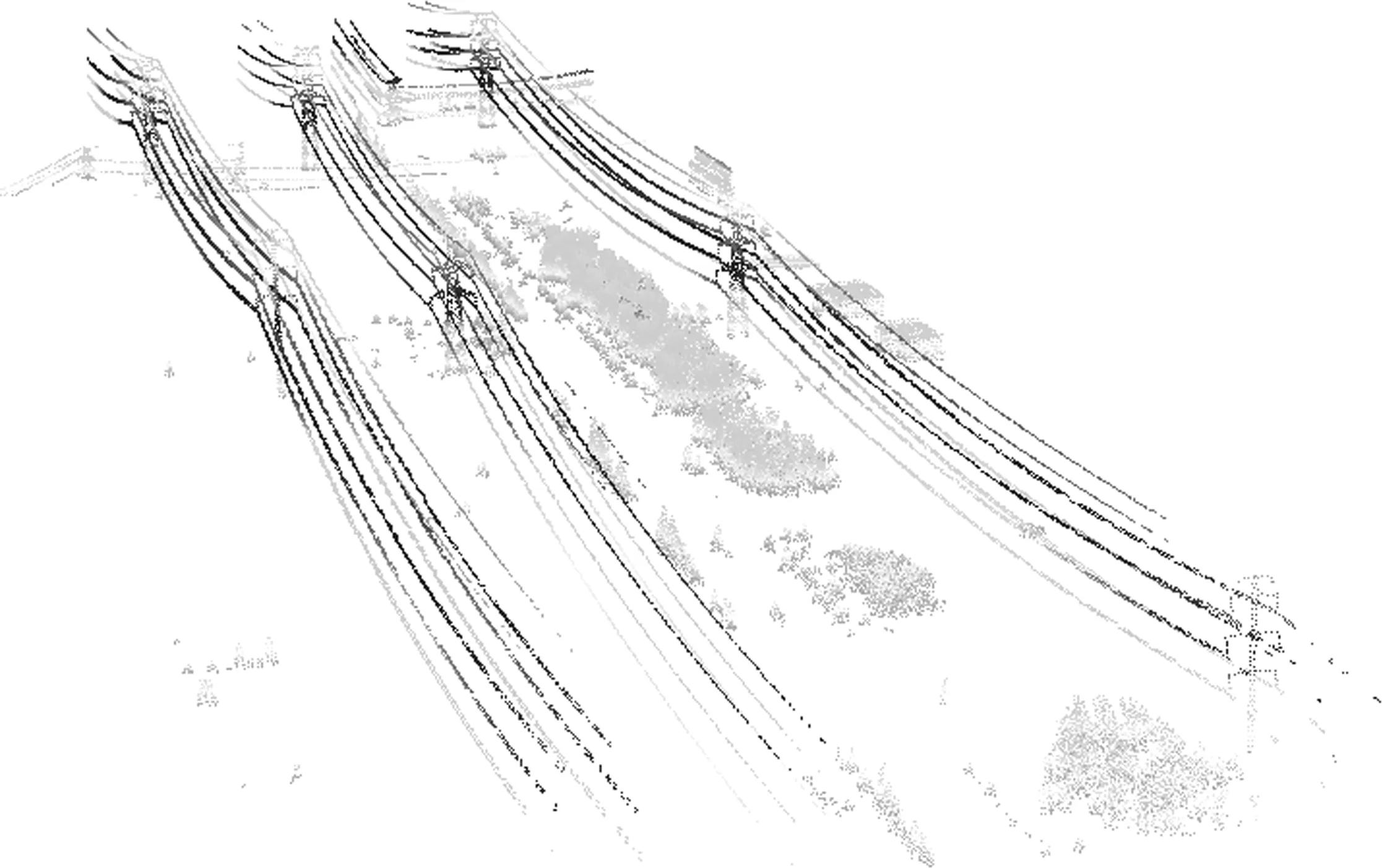
圖5 點(diǎn)云濾波結(jié)果
通過圖5可知,經(jīng)兩次濾波后,大量的地面點(diǎn)、道路點(diǎn)、低矮植被以及與地面連接的塔桿點(diǎn)被剔除,保留了完整的電力線點(diǎn),取得了很好的點(diǎn)云預(yù)處理效果。
基于維度特征進(jìn)行點(diǎn)云分割,并通過密度聚類方法進(jìn)行單根電力線提取。單根電力線分離算法對于參數(shù)的選擇較為敏感,根據(jù)電力線分布情況確定最優(yōu)參數(shù),通常的取值范圍為12~18,取值略小于相鄰電線間的最小距離。通過試驗(yàn)可知,當(dāng)取值15、取值2時得到正確的聚類結(jié)果,此時聚類數(shù)目CCluster=9。單根電力線提取結(jié)果如圖6所示。通過圖6可知,本文提出的改進(jìn)自適應(yīng)鄰域搜索特征值計算方法能夠?qū)c(diǎn)的維度特征進(jìn)行準(zhǔn)確表達(dá),實(shí)現(xiàn)電力線的有效提取,并且通過密度聚類方法提取到完整的單根電力線結(jié)果。

圖6 單根電力線提取結(jié)果
通過最小二乘原理對單根電力線點(diǎn)進(jìn)行曲線擬合,實(shí)現(xiàn)電力線三維模型重建,結(jié)果如圖7所示。

圖7 單根電力線三維重建結(jié)果
為定量分析本文提出電力線點(diǎn)提取的有效性與準(zhǔn)確度,通過第三方點(diǎn)云數(shù)據(jù)處理軟件手動提取電力線點(diǎn)結(jié)果作為參考值,統(tǒng)計電力線點(diǎn)提取誤差率、擬合殘差最大值[20-21]作為指標(biāo)進(jìn)行精度評價,統(tǒng)計結(jié)果如表1所示。

表1 電力線提取與擬合精度統(tǒng)計
通過表1可知,本文方法提取電力線結(jié)果的誤差率幾乎為0,擬合殘差最大值為0.254 m,電力線點(diǎn)分布在擬合對象所在半徑范圍內(nèi),曲線擬合殘差越小,表明模型重建精度越高。
3 結(jié)束語
本文根據(jù)電力線點(diǎn)在機(jī)載LiDAR點(diǎn)云數(shù)據(jù)中的空間分布特征,設(shè)計并實(shí)現(xiàn)了一套電力提取與三維重建方法。首先使用兩種濾波方法對原始點(diǎn)云數(shù)據(jù)進(jìn)行濾波處理,并利用維度特性進(jìn)行電力線提取以及使用密度聚類算法實(shí)現(xiàn)單根電力線分離。利用實(shí)際輸電線路點(diǎn)云數(shù)據(jù)進(jìn)行算法實(shí)驗(yàn),結(jié)果表明本文方法能夠提取完整電力線結(jié)果,并實(shí)現(xiàn)單根電力線的有效分離與三維重建,自動化程度高。對實(shí)驗(yàn)結(jié)果進(jìn)行精度評價,驗(yàn)證了本文算法在電力線點(diǎn)提取與重建方面的準(zhǔn)確性與穩(wěn)健性,能夠滿足實(shí)際工程需要。本文的研究成果可用于大規(guī)模復(fù)雜環(huán)境的輸電線機(jī)載LiDAR點(diǎn)云數(shù)據(jù)處理中,對于電力巡檢等項(xiàng)目工程具有一定的實(shí)用價值。
