車輛碰撞中駕駛員手部主動響應對人體損傷的特性
2023-04-29 16:36:16楊欣秦豪毅馬帥宋家鋒朱勇王瑞祥許述財
汽車安全與節能學報 2023年5期
楊欣 秦豪毅 馬帥 宋家鋒 朱勇 王瑞祥 許述財
摘 要: 研究了車輛碰撞環境下駕駛員手部在方向盤上的主動響應及對人體損傷的影響,以便對于人體損傷標準完善及車輛安全防護設計,提供參考數據。將假人手部結構重建,使手部具備抓握能力。利用關節約束力矩模擬抓握力,設置手部具有抓握力及抓握方向盤不同位置的仿真模型,計算獲得假人各部位損傷數值,與標準假人損傷對比。結果顯示:抓握狀態下,頭部傷害指標(HIC)峰值增加37.5%,頸部伸張力矩最大值減少22.3%,胸部壓縮量最大值減少3%,大腿壓縮力峰值減少36.5%。將方向盤劃分為表盤的位置方位,手部位置在11 點和4 點方位時,頭部HIC 峰值最大;手部位置在8點和4點方位時,胸部壓縮量和大腿壓縮力峰值最大。碰撞中駕駛員手部主動響應對人體損傷影響較大。
關鍵詞: 汽車碰撞;中國體征假人;手部主動響應;人體損傷;頭部傷害指標(HIC);胸部壓縮量;大腿壓縮力
中圖分類號: U 467.14 文獻標識碼: A DOI: 10.3969/j.issn.1674-8484.2023.05.003
汽車行業是我國的主導產業之一[1],交通事故隨汽車銷量增長日益增多。在汽車碰撞事故中,發生正面碰撞的概率為59 %,側面碰撞的發生概率為27 %[2]。正面碰撞工況下的車輛行駛安全是汽車制造與安全測試研究中尤為重要的課題。在汽車被動安全領域,假人常被用來作為評估汽車安全性能以及各種保護成員設備性能的工具。利用數字假人以及物理假人代替真人做測試試驗,通過分析汽車碰撞時假人所承載的力、加速度、位移等物理量來量化人體的傷害程度,因此,碰撞試驗假人成為汽車安全性能測試中的核心技術[3-6]。
在事故發生前即預碰撞階段,人的大腦發出生物信號,使身體各部位迅速做出響應動作,不同駕駛員在碰撞前的駕駛行為對交通事故的影響較大[7],手部抓握方向盤是十分常見的應急響應。然而,目前大多數汽車安全試驗中假人被安裝在固定位置,在當前碰撞測試中忽略了人的主觀意識行為,假人的手放在方向盤上處于自由姿態沒有考慮駕駛員在面對事故發生前的應急反應。
基于此問題國內外學者開展了相關的研究,例如李鏘強[8] 等人利用Madymo 軟件建立大客車與假人模型,建立大客車駕駛員手部有無抓握力的正面碰撞模擬仿真環境,研究得出手部存在抓握力狀態下假人的損傷程度小于手部沒有抓握力狀態下的假人。魏玉釗[9] 等人利用LS-PREPOST 和Oasys PRIMER 軟件建立手部具有抓握力的數字假人并對在自由狀態下以及手部抓握頂棚扶手狀態下的假人損傷程度進行對比分析,仿真結果表明存在手部抓握力狀態下假人主要部位的損傷不同程度的小于自由坐姿姿態下的假人。H. Morvan[10] 等人基于模擬駕駛器分析碰撞前駕駛員手部的行為,利用Madymo 軟件搭建駕駛員手部處于不同位置姿態下的仿真模型分析仿真結果得出結論,手部處于不同位置姿態下假人頭部以及頸部的損害程度存在差異。因此,駕駛員手部對方向盤的抓握和保持能力對于人體損傷評價是不可忽視的一個重要因素,但以上研究未能全面準確的反映碰撞測試中人的主觀意識行為以及在碰撞環境下手部的反射反應對人體損傷程度的影響。
為了探究手部抓握方向盤以及不同抓握位置姿態與人體碰撞損傷之間的關系,本文基于現有的假人模型重構手部結構模型,使其各關節具有一定的自由度,實現對方向盤的抓握,并通過相關軟件對各關節設計鉸鏈實現手部抓握保持力和不同抓握位置姿態的調節,進一步研究碰撞時駕駛員手部主動響應對人體損傷特性的影響,從而與手部在自由狀態下的人體損傷進行對比分析。研究結果將對完善人體損傷評價標準和車輛安全防護設計具有重要的參考意義。
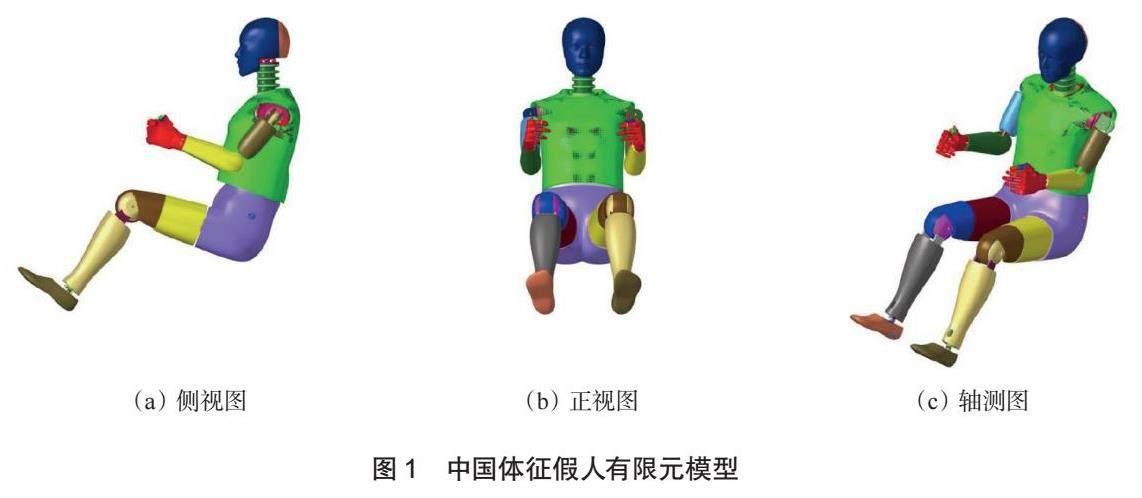
1 中國體征假人有限元模型
本實驗所使用的碰撞假人模型如圖1 所示,該模型是根據中國人體特征尺寸數據[11](GB10000-88)所建立的。
1.1 假人上肢模型
建立假人上肢有限元模型,需參考人體真實的上肢結構。各骨骼間的運動是由各上肢關節決定的,由于實際的人體上肢組織結構復雜,在建立上肢的有限元模型時往往將其進行簡化。關節處通過鉸鏈定義運動,由于上肢各部分的基本屬性不同,所以在導入HyperMesh 2019 后,需要對各部分進行不同的有限元劃分處理[12-13]。原有假人的手部結構經過簡化后,忽略了手指關節運動影響,僅僅保留了手部某個形態,如圖2 所示,在仿真試驗中手部無法發生動作,往往處于被動運動狀態,很容易與方向盤脫離。
1.2 手部模型重建
設計手部總體的結構,從而實現在碰撞過程中能夠抓握方向盤的功能需要參考人手的骨骼結構、運動機理以及主要功能。由于人手非常靈活,約21 個自由度[14],且骨骼復雜,所以根據仿真實驗環境,對手部結構設計進行簡化。因為人手的靈活性是通過手腕和手之間的相互配合來實現的,所以手部的抓握功能需要分析抓握過程中手部與腕部作用,手對應的功能是抓握,而手腕對應的作用是手部在執行抓握運動時對手部姿態進行調整。基于對人手的運動研究,僅保留各指節間的轉動以及大拇指翻轉共15 個自由度。根據中國體征假人手部模型,對各指節數據進行測量,詳細的數據如表1 所示。指節的運動狀態都可近似看作一個自由度,可以由一個旋轉鉸鏈進行模擬。
根據中國男性飛行員人體尺寸(GJB4856-2003) [15]提取的手指數據,并利用SolidWorks 軟件,建立三維模型;利用有限元前處理軟件HyperMesh,對手指各部分進行網格劃分,并利用HyperMesh 1D 面板中的fejoints,建立鉸鏈模型。手的材料為*MAT7 橡膠材料,設置密度ρ= 0.9 g/cm3,剪切模量設置為0.19 GPa。結構模型和處理完成的有限元模型如圖3 所示。
2 碰撞仿真模型構建
2.1 碰撞駕駛環境
為了便于觀察假人的運動姿態和縮短仿真計算時間,對車輛模型進行簡化,僅保留汽車駕駛室的模型,并將整車其他部分簡化成一個質點,將模型的質量以及轉動慣量等數值賦予質點。根據假人在正面碰撞情況時損傷部位所接觸的模型,簡化駕駛室的模型如圖4所示。
駕駛室的模型主要有頂棚、車門、前窗、地板、安全帶和儀表盤等。根據(China-New Car AssessmentProgram, C-NCAP)實驗規定,提取整車碰撞試驗的加速度曲線將模型賦予加速度曲線,來模擬實車碰撞的過程。其加速度曲線如圖5 所示。
2.2 假人手部模型替換
在已有中國體征坐姿假人的模型基礎上,只對假人的手部進行替換。保持原有的手部和腕部的接觸關系, 利用關鍵字*CONTACT_TIED_NODES_TO_SURFACE 定義手部和腕部的接觸,用旋轉鉸鏈定義兩者轉動關系。為防止碰撞過程中由于速度過高網格出現大變形,賦予整個手部一層NULL 面,材料為*MAT9,Poisson 比為0.3。通常在有限元仿真過程中不能出現各COMPONENT 之間相互穿透以及自穿透,因此根據標準和規范調整手部與方向盤、手部與假人其他部位之間為*CONTACT_TIED_SURFACE_TO_SURFACE。替換前后的假人姿態如圖6 所示。
2.3 手部抓握保持力設置
將劃分網格后的人手,導入軟件Primer 11 中進行鉸鏈的旋轉角度參數設置,根據假人各部位間的連接關系,設置手指和手掌,手掌和手臂之間的子母關系,實現手部抓握方向盤的動作姿態。
據密歇根大學的統計,汽車高速狀態下人手抓握方向盤的力平均值為189.6 N [16]。基于已有研究對此方向的探討,以坐姿狀態下駕駛員手部握緊方向盤的190 N握力為例。在HyperMesh 中,通過設置鉸鏈屬性利用關鍵字*JOLINT_STIFFNESS_GENERLIZED 對剛度和約束力矩進行調整以此來模擬駕駛員握緊方向盤的保持力[8-9]。參照相關文獻并對照相關方面的數據[12],可以確定拇指關節的約束力矩為53.2 mNm,四指關節約束力矩值為1.143 Nm。
2.4 手部抓握位置設置
在碰撞過程中,駕駛員手部主要與方向盤進行交互。為便于探究駕駛員抓握方向盤不同位置對人體損傷狀況的影響,將方向盤按表盤分布劃分成不同方位。參考相關文獻對駕駛員駕駛習慣的研究,左手在方向盤上的位置概率如圖7 所示[10]。
由于雙手抓握方向盤可以更好的控制車輛,右手的位置分布與左手對稱,因此根據圖中手部對應的抓握幾率,選擇3 種不同的雙手抓握位置(如圖8a—8c所示)。同時考慮到碰撞過程中,駕駛員的手部會出現應激反應而發生急打方向盤的動作,設置如圖8d 所示手部抓握動作。
3 碰撞結果分析
對替換手部模型后的中國體征假人有限元模型導入LS-DYNA SMP 13.0 進行碰撞仿真實驗,通過與無手部抓握力碰撞情況下得出的數據進行對比,分析重建模型后駕駛員各部位的損傷數值,同時設置不同駕駛姿態,研究手部在方向盤不同位置時對自身損傷數值的影響。
3.1 假人姿態響應對比分析
碰撞過程中車內駕駛員在慣性的作用下身體會向前傾,而不同的姿態變化可能會導致安全氣囊、安全帶等保護裝置不能提供駕駛員最有效地保護,從而造成身體各部位損傷程度不同[17]。仿真試驗2 種狀態下的假人運動姿態如圖9 所示,圖中α、β 分別表示碰撞中無手部抓握與存在手部抓握情況下假人上下臂之間的夾角。
從圖9 可得:碰撞發生后,車體減速,假人身體保持向前運動,受安全帶限制,假人的頭頸部先于上半身前傾。0~60 ms 內,2 種狀態下的假人運動姿態相同。在60 ms 時,2 種狀態下的假人頭部開始接觸安全氣囊,無手部抓握力的假人手部已經脫離方向盤。在80 ms 時,無抓握力的手部已經完全脫離方向盤,在80~120 ms 之間,手部由于慣性向上運動,存在手部抓握力的假人上肢運動姿態基本保持一致。
在整個碰撞過程中,存在手部抓握力的假人,由于手部與方向盤存在接觸和力的關系,導致假人在向前運動的同時受到向后的作用力,所以相較于無手部抓握力的假人,頭部與安全氣囊接觸的時間短,在100 ms時圖中可以看出存在手部抓握力假人的頭部已經脫離安全氣囊。在無手部抓握力情況下假人手部被氣囊彈飛,在碰撞過程中α 角的角度變化范圍很小,因此整個上臂的姿態變化受限,而有手部抓握力作用的模型由于存在肘部、腕部等相關關節的變化,使β 角的角度變化范圍相對較大則更顯真實。
如圖10 所示:2 種姿態下假人頭部與肩部在X 和Z 方向的位移存在差異,存在手部抓握力假人的頭部在X 與Z 方向的位移峰值小于無抓握力姿態下的假人,峰值相對減小了40.3% 和39.7%。無抓握力姿態下的假人肩部在X 方向上的位移峰值相對存在手部抓握力的假人上升了42.6%,但在Z 方向上存在手部抓握力的假人位移峰值要高于無手部抓握力姿態下的假人。由于手部與方向盤之間存在力的關系導致存在手部抓握力假人的肘部力峰值和無手部抓握力假人相比增大了49.4%,而肩部力峰值相對減小了29.7%。假人頭部與安全氣囊接觸時間存在10 ms 的差值,下肢與儀表盤的接觸時間也同樣存在差異,如表2 所示。
由2 種不同狀態下的假人姿態分析可得,通過設置手部抓握力,會對碰撞環境下假人的運動姿態,有較為明顯的影響。
3.2 假人損傷對比分析
根據美國國家事故中心提供的數據以及結合2021年C-NCAP 管理規則。為更加全面、準確分析不同抓握力以及姿態之間假人損傷的差異性,本文對假人的頭部、頸部、胸部及下肢等各部位進行損傷的對比分析。
3.2.1 頭部損傷結果對比
仿真實驗中模擬駕駛員頭部的損傷,主要考慮在碰撞過程中駕駛員與汽車之間發生相對運動,頭部產生加速度而導致頭部受傷。根據C-NCAP,頭部的主要損傷判斷指標為頭部傷害指標(head injury criterion,HIC)定義為
從圖11 可知:存在手部抓握力的假人頭部合成加速度峰值要高于無抓握力狀態下的假人,且到達峰值的時間晚于無抓握力的假人。分析產生差別的原因:碰撞過程中手部存在抓握力的情況下,假人的手部力會傳遞給腕部從而帶動肘關節運動,上肢彎曲,上臂與下臂之間的夾角減小會導致加速度增大,從而導致駕駛員頭部合成加速度值變大。
從假人的運動姿態上也能明顯看出。在60 ms 無手部抓握力的假人頭部開始接觸安全氣囊的瞬間,上肢受力而發生姿態變化。隨之手部被氣囊力彈飛而脫離方向盤,之后運動中上臂與下臂的夾角基本上沒有變化。而存在手部抓握力的假人,在整個碰撞過程中上肢姿態都在變化。由于無手部抓握力的假人手部與方向盤脫離,手部與方向盤之間無作用力,所以假人頭部與安全氣囊接觸時間較長,在X 方向上的運動速度增大,因此導致到達峰值的點也相對提前。
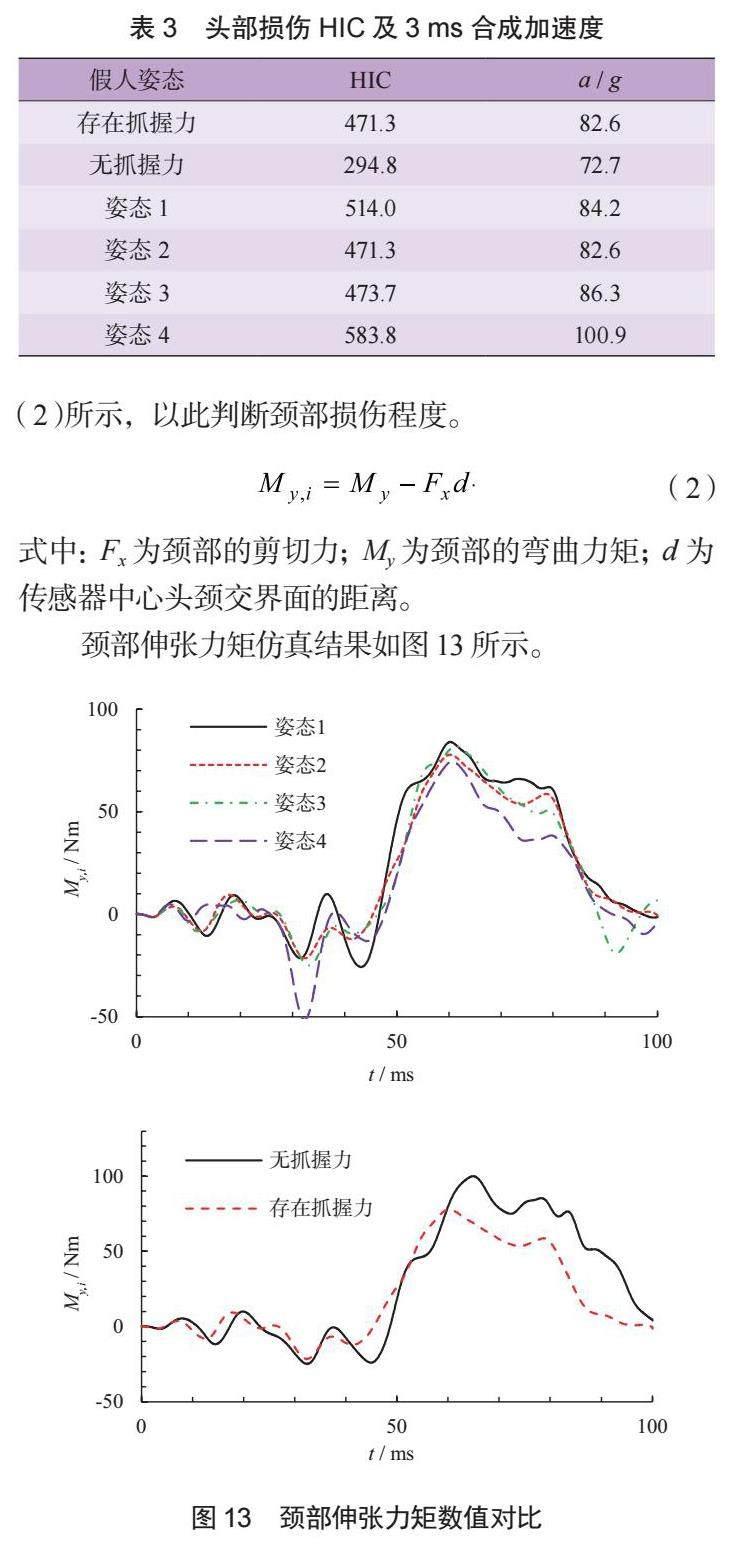
不同抓握位置姿態下所對應的頭部合成加速度峰值也不相同。與其他3 種姿態相比,姿態4 的峰值最大,比最小的姿態2 頭部合成加速度峰值增大了18.1%,HIC 值增大了19.3%。分析原因:在峰值前后,由于上肢姿態變化的不同,導致姿態4 狀態下的假人頭部旋轉角度增大如圖12 所示,造成頭部合成加速度值增大。4 種姿態、有無手部抓握力的頭部損傷HIC 及3 ms 合成加速度見表3。
3.2.2 頸部損傷結果對比
頸部損傷通過測量在碰撞過程中駕駛員頸部所受到的力與力矩[18-20],C-NCAP 假人頸部損傷準則如式(2)所示,以此判斷頸部損傷程度。
式中: Fx 為頸部的剪切力; My 為頸部的彎曲力矩; d 為傳感器中心頭頸交界面的距離。
頸部伸張力矩仿真結果如圖13 所示。
由圖13 可知:無手部抓握力假人頸部伸張力矩峰值最高,為99.99 Nm,平均值為28 Nm。相較于手部存在抓握力假人的頸部伸張力矩峰值升高了22.3%,平均值升高了29.5%。分析原因:在碰撞瞬間,汽車速度降低,假人受慣性影響繼續向前運動。此時,安全帶起到了約束作用使頭頸部以較快的速度向前運動,頸部伸張力矩開始增大。在40~50 ms 頭部接觸安全氣囊的瞬間開始反向增大。手部有抓握力假人的上下臂夾角變小,假人的頭頸部位與未完全充氣的安全氣囊接觸因此提前進入減速階段,頸部損傷曲線到達峰值的時間點提前,因此相對受到的沖擊力小,頸部伸張力矩的峰值與平均值相對沒有手部抓握力的假人數值有所降低。
手部處于方向盤不同位置姿態下的假人,頸部伸張力矩曲線基本保持一致。最大值為姿態1 對應的84.02 Nm,與姿態4 對應的最小值相比增大了12.6%。在30 ms 左右,處于姿態3 狀態下的假人由于手臂受安全氣囊擠壓導致身體上半身向前運動速度變小,因此頸部向前運動的速度對應變大,所以頸部伸張力矩數值較大。結果顯示4 種姿態下的假人對頸部損傷數值影響較小。
3.2.3 胸部損傷結果對比
在正面碰撞中,胸部損傷主要來源于安全帶束縛力、汽車內飾部件以及與方向盤之間的撞擊[21]。通過胸部壓縮量來判斷損傷概率,粘性指數VC 來衡量碰撞中的非穿透傷。仿真結果如圖14 所示。
由圖14 可知:在60 ms 左右4 種不同抓握位置情況下假人的胸部壓縮量出現峰值,曲線變化趨勢基本一致。無抓握力狀態下假人最大壓縮量為39.93 mm,相對于存在手部抓握力曲線峰值升高了3%,在50 ms之前兩條曲線變化幅度差別不大,存在手部抓握力狀態下的假人數值曲線略高于無手部抓握力假人的數值曲線,在之后的時間無抓握力的曲線明顯較高。
分析原因,在正面碰撞中,假人胸部壓力來源于胸前的物品,兩者之間發生擠壓動作形成胸部壓縮量。在碰撞初期假人受慣性而向前運動,受安全帶束縛作用的影響,胸部壓縮量逐漸增大,存在抓握力的假人手部與方向盤之間有接觸力,導致假人上肢姿態變化,從而向前的加速度也相對增大,因此胸部壓縮量略大。但在50 ms 之后存在手部抓握力的假人與充氣階段的安全氣囊接觸胸部壓縮量數值開始小于手部處于自由狀態下的假人,受安全氣囊的影響,胸部壓縮量開始逐漸減小,存在手部抓握力的假人提前向后運動,因此胸部壓縮量較無手部抓握力的假人小。
手部處于方向盤上不同位置姿態下的假人,姿態3 對應的胸部壓縮量值最大,這是因為碰撞時手臂向內彎曲導致假人運動加速度過大。而姿態4 狀態下的假人由于手臂在腹部與安全氣囊產生相對運動,導致假人上半身運動速度變小從而使損傷值較小。結合粘性指數曲線得出,碰撞過程中手部抓握位置在8 點和4點方位時胸部損傷相對較大。
3.2.4 下肢損傷結果對比
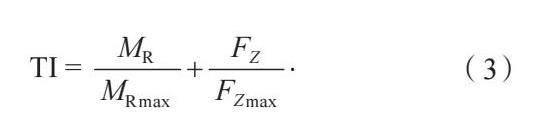
在汽車發生碰撞時,對腿部的損傷主要來源于人體腿部與儀表盤的接觸[22-24]。大腿壓縮力和脛骨指數TI分別用來評估大腿和小腿的損傷,TI 的計算公式為:
式中: MR 表示合成彎矩; FZ 表示小腿骨軸向力; MR max表示合成彎矩閥值; FZ max 表示小腿骨軸向力閥值。仿真結果如圖15 所示。
由圖15 可知:無手部抓握力假人的大腿壓縮力最大值為2.58 kN,存在手部抓握力的假人大腿壓縮力曲線基本一致,上下波動較小,其最大值為1.64 kN,相比于無手部抓握力的假人大腿壓縮力最大值降低了36.5%。存在手部抓握力假人大腿的損傷風險比無手部抓握力假人小。在碰撞初期,受安全帶的限制,假人的軀干被束縛在座椅上。碰撞中,存在手部抓握力假人的上肢姿態變化導致假人腿部接觸儀表盤的時間點提前,假人提前向后運動;因此存在手部抓握力假人的大腿壓縮力相對無手部抓握力的峰值小。但從圖15a脛骨指數TI 值可以看出,2 條曲線的峰值和變化趨勢差別較小;因此,有無抓握力對假人小腿的損傷影響較小。
手部處于方向盤上不同位置姿態下的假人,姿態3 對應的大腿壓縮力最大。這是由于碰撞時手臂向內彎曲假人運動速度過大導致的。結合脛骨指數曲線得出:碰撞過程中手部抓握位置在8 點和4 點方位,下肢損傷相對較大。
4 結 論
通過研究重建中國體征測試假人手部模型的方法,設置手指關節的約束力矩以此實現駕駛員手部抓握保持力。利用LS-DYNA 軟件構建仿真環境,依據仿真結果分析駕駛員手部對于方向盤有無抓握姿態以及抓握位置對自身的損傷。結論如下:
1) 正面碰撞仿真環境下,假人手部有無抓握力對其運動姿態有顯著影響,主要表現在假人上肢,存在手部抓握力的假人其手部在運動過程中沒有出現脫離方向盤的現象,且對比無手部抓握力的假人,下肢姿態變化也存在差異。
2) 存在手部抓握力的假人相比自由狀態下的假人,其頭部損傷HIC 峰值增大了37.5%,頸部伸張力矩最大值減小了22.3%,胸部壓縮量峰值減小了3%,大腿壓縮力最大值減小了36.5%。結果表明在碰撞過程中,存在手部抓握力對人體各部位的損傷數值有顯著差異。
3) 經過對手部處于方向盤不同位置時的假人損傷數值對比,碰撞時抓握位置在9 點和3 點方位時,頭部損傷相對較輕,在11 點和4 點方位時,頸部損傷相對較輕而在8 點和4 點方位時,胸部和下肢損傷相對較為嚴重。因此抓握位置的不同,也對汽車碰撞實驗中人體損傷評價有很大的影響,是不可忽視的因素。
參考文獻(References)
[1] 王婷. 我國汽車行業發展現狀與趨勢[J]. 企業改革與管理, 2020(16): 214-215.
WANG Ting. Development status and trend of Chinasautomobile industry [J]. Enterprise Reform Manag,2020(16): 214-215. (in Chinese)
[2] 呼慧敏, 李先學, 丁立, 等. 汽車碰撞假人研究綜述[J].標準科學, 2015(7): 6-9.
HU Huimin, LI Xianxue, DING Li, et al. Review ofresearch on automobile crash dummies [J]. Standard Sci,2015(7): 6-9. (in Chinese)
[3] Denninger M, Huppe N, Gou M, et al. A tunable handbiofidelity-enhancing device for Hybrid III dummies [J].Intl J Crashworthiness, 2012, 17(4): 377-383.
[4] 劉志新, 武永強, 馬偉杰. 中國體征碰撞測試假人開發路徑研究[J]. 中國工程科學, 2019, 21(3): 103-107.
LIU Zhixin, WU Yongqiang, MA Weijie. Research on thedevelopment path of Chinese physical crash test dummy[J]. Eng Sci, 2019, 21(3): 103-107. (in Chinese)
[5] XU Tao, SHENG Xiaoming, ZHANG Tianyi, et al.Development and validation of dummies and humanmodels used in crash test [J]. Appl Bionics Biomech, 2018,2018: 1-12.
[6] 陳嘉鑫. 基于中國體征的正碰假人仿真研究與應用[D].長春: 吉林大學, 2021.
CHEN Jiaxin. Research and application of simulation ofpositive congenerative dummy based on Chinese signs [D].Changchun: Jilin University, 2021. (in Chinese)
[7] 于海. 汽車駕駛人事故前應急操作行為探討[J]. 汽車與駕駛維修( 維修版), 2018(5): 104+106.
YU Hai. Discussion on emergency operation behavior ofautomobile driver before accident [J]. Auto Driv Maint(Maint Ed), 2018(5): 104+106. (in Chinese)
[8] 李鏘強, 李麗君, 胡寶洋. 大客車駕駛員有無手部抓握力的傷害對比數值分析[J]. 農業裝備與車輛工程, 2013,51(4): 37-39.
LI Qiangqiang, LI Lijun, HU Baoyang. Comparativenumerical analysis of injuries with or without hand gripforce in bus drivers [J]. Agri Equi Vehi Eng, 2013, 51(4):37-39. (in Chinese)
[9] 魏玉釗, 任傳波, 呂浩, 等. 碰撞中乘員有無抓握頂棚扶手下的傷害對比分析[J]. 科學技術與工程, 2020, 20(11):4566-4571.
WEI Yuzhao, REN Chuanbo, L? Hao, et al. Comparativeanalysis of injuries under the roof armrest in collision [J].Sci Tech Eng, 2020, 20(11): 4566-4571. (in Chinese)
[10] Morvan H, Tan K H, Robache F, et al. Pre-crashinvestigation using a driving simulator and numericalanalyses to determine the influence of the arms positions[J]. Intl J Crashworthiness, 2007, 12(5): 531-539.
[11] 中國國家質量監督檢驗檢疫總局. 中國成年人人體尺寸:GB10000-88 [S]. 北京: 中國標準出版社, 1998.
General Administration of Quality Supervision, Inspectionand Quarantine of China. Chinese adult body size:GB10000-88 [S]. Beijing: China Standard Press, 1998. (inChinese)
[12] 郭磊. 汽車與兩輪車碰撞事故的仿真研究及應用[D]. 上海: 上海交通大學, 2008.
GUO Lei. Simulation research and application ofautomobile and two-wheeler collision accident [D].Shanghai: Shanghai Jiao Tong University, 2008. (inChinese)
[13] 陳吉清, 劉朝陽, 蘭鳳崇. 中國人體上肢碰撞損傷有限元模型的開發[J]. 華南理工大學學報( 自然科學版), 2017,45(8): 21-27.
CHEN Jiqing, LIU Chaoyang, LAN Fengchong.Development of finite element model for collision damageof Chinese upper limb [J]. J South China Univ Tech (NatSci Ed), 2017, 45(8): 21-27. (in Chinese)
[14] 趙小歡. 仿生手的結構設計和抓握控制研究[D]. 秦皇島:燕山大學, 2017.
ZHAO Xiaohuan. Research on structure design andgrip control of bionic hand [D]. Qinhuangdao: YanshanUniversity, 2017. (in Chinese)
[15] 中國人民解放軍總裝備部. 中國男性飛行員人體尺寸:GJB4856-2003 [S]. 北京:中國標準出版社, 2003.
General Armament Department of the Chinese PeoplesLiberation Army. Chinese male pilot body size: GJB4856-2003 [S]. Beijing: China Standard Press, 2003. (inChinese)
[16] Eksioglu M, Kizilaslan K. Steering-wheel grip forcecharacteristics of drivers as a function of gender, speed,and road condition [J]. Intl J Indu Ergonomics, 2008,38(3-4): 354-361.
[17] 崔東, 祁志楠, 張慧. 緊急制動下的駕駛員運動姿態變化與碰撞損傷研究[J]. 汽車工程, 2020, 42(8): 1060-1065.
CUI Dong, QI Zhinan, ZHANG Hui. Study on drivermotion attitude change and collision damage underemergency braking [J]. Autom Engineering, 2020, 42(8):1060-1065. (in Chinese)
[18] 丁冉冉, 胡經國, 朱曉勇, 等. 碰撞假人頸部評價研究[J].汽車實用技術, 2020(1): 54-58.
DING Ranran, HU Jingguo, ZHU Xiaoyong, et al.Evaluation of colliding dummy neck [J]. Auto Prac Tech,2020(1): 54-58. (in Chinese)
[19] 李海巖, 李廣明, 賀麗娟, 等. 汽車追尾碰撞中頸部姿態對生物力學響應的影響[J]. 汽車安全與節能學報, 2022,13(1): 55-62.
LI Haiyan, LI Guangming, HE Lijuan, et al. Effect of neckattitude on biomechanical response in rear-end collision [J].J Auto Safe Energy, 2022, 13(1): 55-62. (in Chinese)
[20] Jakobsson L, Norin H, Svensson M Y. Parametersinfluencing AIS 1 neck injury outcome in frontal impacts[J]. Traf Inju Prev, 2004, 5(2): 156-163.
[21] 肖森, 楊濟匡, 肖志, 等. 基于正面碰撞實驗的胸部損傷有限元分析[J]. 力學學報, 2017, 49(1): 191-201.
XIAO Sen, YANG Jikuang, XIAO Zhi, et al. Finiteelement analysis of chest injury based on frontal collisionexperiment [J]. Chin J Theor Appl Mechanics, 2017,49(1): 191-201. (in Chinese)
[22] 黃偉, 蘭鳳崇, 陳吉清, 等. 乘員下肢生物力學模型與KTH 正面碰撞損傷分析[J]. 汽車工程學報, 2016, 6(2):106-114.
HUANG Wei, LAN Fengchong, CHEN Jiqing, et al.Biomechanical model of occupant lower extremity andfrontal collision damage analysis of KTH [J]. J Auto Eng,2016, 6(2): 106-114. (in Chinese)
[23] Ammori MB, Abu-Zidan FM. The biomechanics of lowerlimb injuries in frontal-impact road traffic collisions [J].Afri Health Sci, 2018, 18(2): 321-332.
[24] XIAO Sen, SHI Xuewei, SUN Xiuxiu, et al. ImpactOverlaps on occupant lower limb injuries under car frontalcrash [J]. Intl J Auto Tech, 2022, 23(3): 659-665.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年7期)2022-04-20 11:44:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
汽車電器(2018年1期)2018-06-05 01:22:54
光學精密工程(2016年6期)2016-11-07 09:07:19
公民與法治(2016年4期)2016-05-17 04:09:26
核科學與工程(2015年4期)2015-09-26 11:59:03