神經網絡識別和Markov鏈預測的商用車APU控制策略
2023-04-29 16:36:16王君琦李勇滔鄭偉光張彥會陳子郵許恩永李育方王善超
汽車安全與節能學報 2023年5期
王君琦 李勇滔 鄭偉光 張彥會 陳子郵 許恩永 李育方 王善超
摘 要: 為改善商用車空氣處理系統的燃油經濟性,提出一種以基于電磁閥控制的電控空氣處理單元(APU)控制策略,進行了Simulink 系統仿真實驗。該策略具有基礎、低壓和高壓等3 種工作模式;基于發動機工況識別和預測方法;利用Matlab/Simulink 搭建車輛模型和空氣處理系統模型;并構建了神經網絡模式識別和Markov 鏈預測控制模型對發動機的運行工況進行識別分類和需求扭矩百分比預測。結果表明:仿真實驗驗證了工況分類和電磁閥控制策略的有效性。在中國重型商用車瞬態工況(C-WTVC)下,與相同儲氣筒初始氣壓條件的機械APU 相比較,應用該控制策略的電控APU 的功率消耗下降480 Wh,下降比率34.7%,燃油經濟性顯著改善。
關鍵詞: 商用車;燃油經濟性;空氣處理單元(APU);電磁閥控制;控制策略;模式識別;Markov 鏈
中圖分類號: U 463.55 ;TP 212 文獻標識碼: A DOI: 10.3969/j.issn.1674-8484.2023.05.009
使用電子控制并優化其控制策略從而提升商用車輛的燃油經濟性、安全性和駕駛體驗成為了不可阻擋的趨勢[1-3]。因為電子控制的汽車零部件有著更加智能化、精確化和響應快等優勢[4],且合理的車輛電子電氣架構可以實現車輛信息共享、滿足功能分配、滿足成本控制等特點[5],對機械零部件實現電子控制或將現有的機械零部件更換為電子控制的零部件是滿足提升燃油經濟性的有效方法。
空氣處理單元(air processing unit,APU)是商用車空氣處理系統中處理干燥壓縮空氣的重要部件,其主要作用是干燥和清潔空氣壓縮機輸入的壓縮空氣。因空氣處理系統涉及的空氣壓縮機對燃油消耗存在一定影響,近年來該系統的性能優化問題受到了國內外學者的高度重視。
楊長偉[6-7] 等人明確了空氣壓縮機的占空比和實際工作時間為評價APU 性能的重要指標,并提出了更改空氣處理系統零件的機械結構以實現減少能量消耗的方法。項小雷[8] 等人將鍵合圖理論用于分析空氣處理系統,以提升系統的響應性能。傳統APU 由于采用的是氣壓控制的調壓閥,固定的氣壓值控制調壓閥換向只能為APU 提供單一的工作模式,未能滿足日益復雜的行駛工況和駕駛需求。電子控制的汽車零部件能夠實現更高的控制精度和更復雜的控制任務,不僅可以通過合適的模式工作閾值和合理的模式切換策略,兼顧不同的駕駛工況,以達到節省燃油和提高動力性的需求[9],還可利用先進的控制算法對車輛或發動機的運行工況進行預判斷,使其工作狀態更加安全穩定[10-12]。電子控制的APU 能夠通過不同的工作模式匹配對應的工況形式,相比于傳統的機械式APU,其在燃油經濟性、零部件使用壽命方面具有一定的提升[13-14]。
為此,本文以電控空氣處理單元APU 的占空比和能量消耗為研究對象,基于發動機工況識別和預測,提出的一種具有多工作模式的商用車APU 控制策略。將利用Matlab/Simulink 搭建駕駛員、車輛和APU 的仿真模型。通過對實車行駛數據進行訓練,由神經網絡完成發動機工況的分類識別,并使用Markov 鏈預測未來短時間內的發動機需求扭矩輔助工況識別,根據識別分類和預測發動機工況對APU 的模式進行控制。可望進一步優化模式識別和預測算法,提升商用車空氣處理系統的能耗表現。
1 商用車電控APU 模式
1.1 電控APU 工作模式
空氣處理單元APU. 包含空氣壓縮機、干燥罐和儲氣筒等主要零部件。電控APU 可以控制入口壓力,從而控制空氣壓縮機的功率消耗。在對電控APU 工作模式設計時,應考慮車輛的發動機運行工況,并將發動機運行工況和APU 工作模式進行匹配。在應對加速或爬坡等對發動機功率需求較大的工況時,空氣壓縮機應減少對發動機的功率和扭矩消耗;而應對減速或下坡等工況時,車輪可以對發動機進行反拖,空氣壓縮機應充分利用反拖能量進行泵氣。通過分析上述發動機工況并對各運行工況進行匹配,設計基礎模式、低壓模式和高壓模式3 種APU 工作模式。
商用車電控APU 的3 種工作模式主要特點如下:基礎模式,儲氣筒的氣壓適中,空氣壓縮機負荷適中,發動機做功直接帶動空氣壓縮機,有一定的燃油消耗;低壓模式,儲氣筒的氣壓較低,空氣壓縮機負荷低,發動機在進入該模式一段時間內不帶動空氣壓縮機,空氣壓縮機不消耗發動機功率;高壓模式,儲氣筒的氣壓較高,空氣壓縮機負荷較高,燃油消耗大,若發動機靠車輛滑行或下坡反拖的能量對空氣壓縮機做功,可以減少燃油消耗。
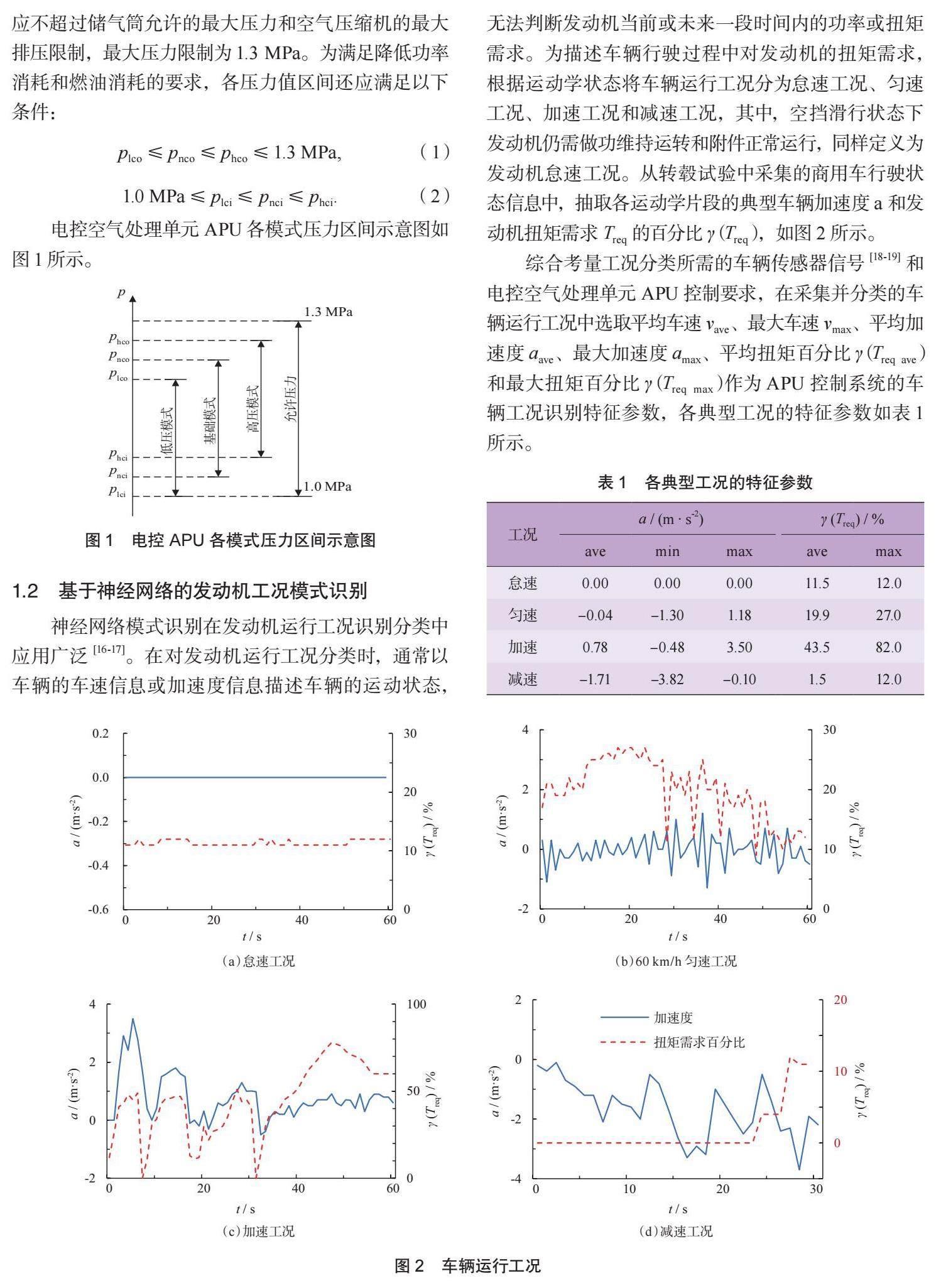
在基礎模式、低壓模式和高壓模式下,轉入泵氣狀態的切進壓力分別為pnci、plci、phci ;轉入卸荷模式的切斷壓力分別為pnco、plco、phco。其中,最低壓plci 應滿足國標[15] 最低額定工作氣壓1.0 MPa ;最大壓力phco應不超過儲氣筒允許的最大壓力和空氣壓縮機的最大排壓限制,最大壓力限制為1.3 MPa。為滿足降低功率消耗和燃油消耗的要求,各壓力值區間還應滿足以下條件:
電控空氣處理單元APU 各模式壓力區間示意圖如圖1 所示。
1.2 基于神經網絡的發動機工況模式識別
神經網絡模式識別在發動機運行工況識別分類中應用廣泛[16-17]。在對發動機運行工況分類時,通常以車輛的車速信息或加速度信息描述車輛的運動狀態,無法判斷發動機當前或未來一段時間內的功率或扭矩需求。為描述車輛行駛過程中對發動機的扭矩需求,根據運動學狀態將車輛運行工況分為怠速工況、勻速工況、加速工況和減速工況,其中,空擋滑行狀態下發動機仍需做功維持運轉和附件正常運行,同樣定義為發動機怠速工況。從轉轂試驗中采集的商用車行駛狀態信息中,抽取各運動學片段的典型車輛加速度a 和發動機扭矩需求Treq 的百分比γ(Treq),如圖2 所示。
綜合考量工況分類所需的車輛傳感器信號[18-19] 和電控空氣處理單元APU 控制要求,在采集并分類的車輛運行工況中選取平均車速vave、最大車速vmax、平均加速度aave、最大加速度amax、平均扭矩百分比γ(Treq ave)和最大扭矩百分比γ(Treq max)作為APU 控制系統的車輛工況識別特征參數,各典型工況的特征參數如表1所示。
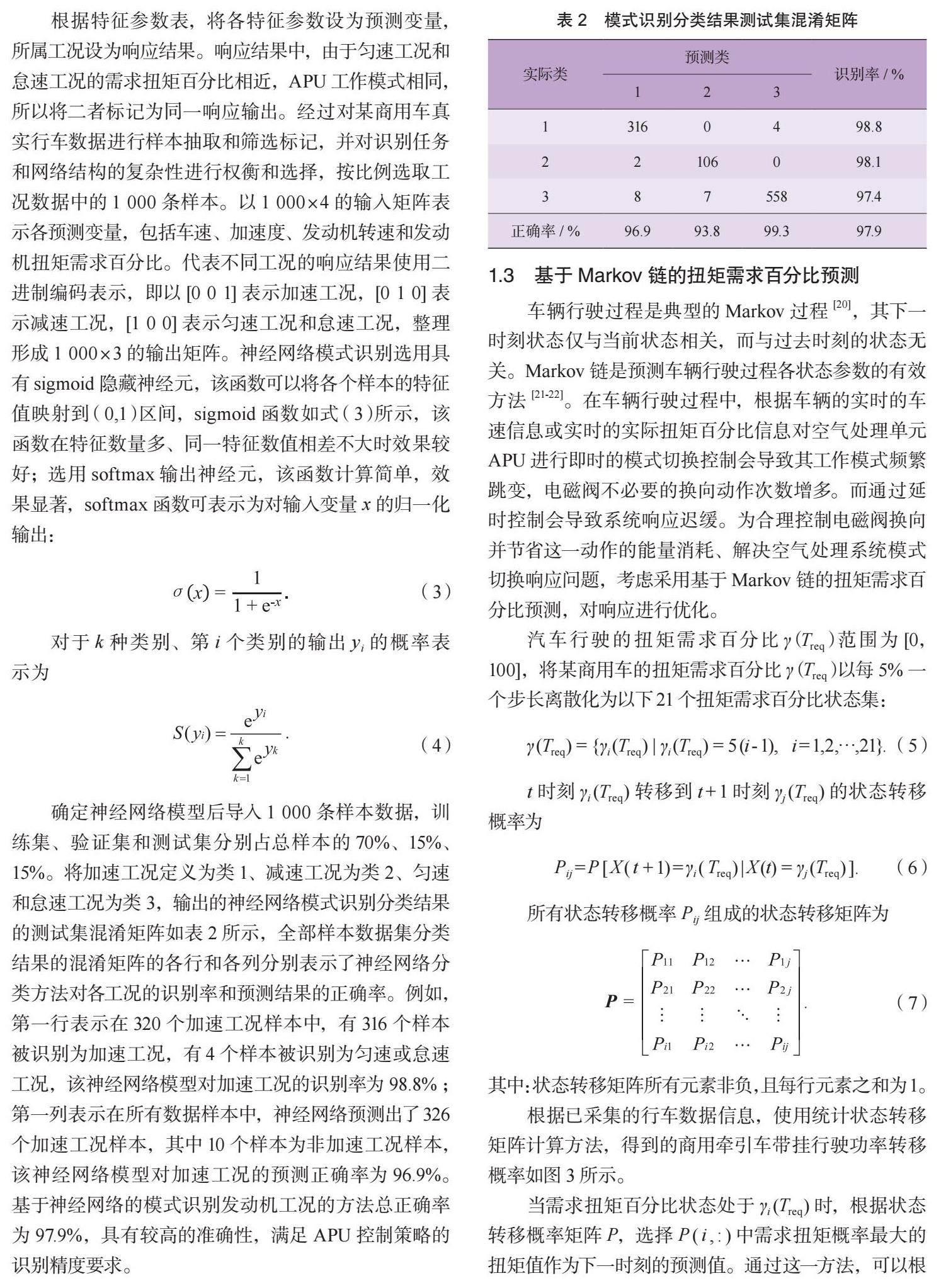
根據已采集的行車數據信息,使用統計狀態轉移矩陣計算方法,得到的商用牽引車帶掛行駛功率轉移概率如圖3 所示。
當需求扭矩百分比狀態處于γi (Treq) 時,根據狀態轉移概率矩陣P,選擇P ( i , : ) 中需求扭矩概率最大的扭矩值作為下一時刻的預測值。通過這一方法,可以根據狀態轉移概率Pij 的k 階概率確定未來k 步的加速度狀態。若車輛在同一工況下,車輛需求扭矩百分比狀態分布概率穩定,可按照上述Markov 預測方法獲得理想的預測結果,為防止概率矩陣隨車輛運行數據更新或駕駛員駕駛風格不同而發生變化,導致預測結果出現誤差,還應對狀態轉移矩陣進行實時更新,其更新過程如圖4 所示。
2 車輛關鍵部件參數及其建模
2.1 車輛關鍵參數
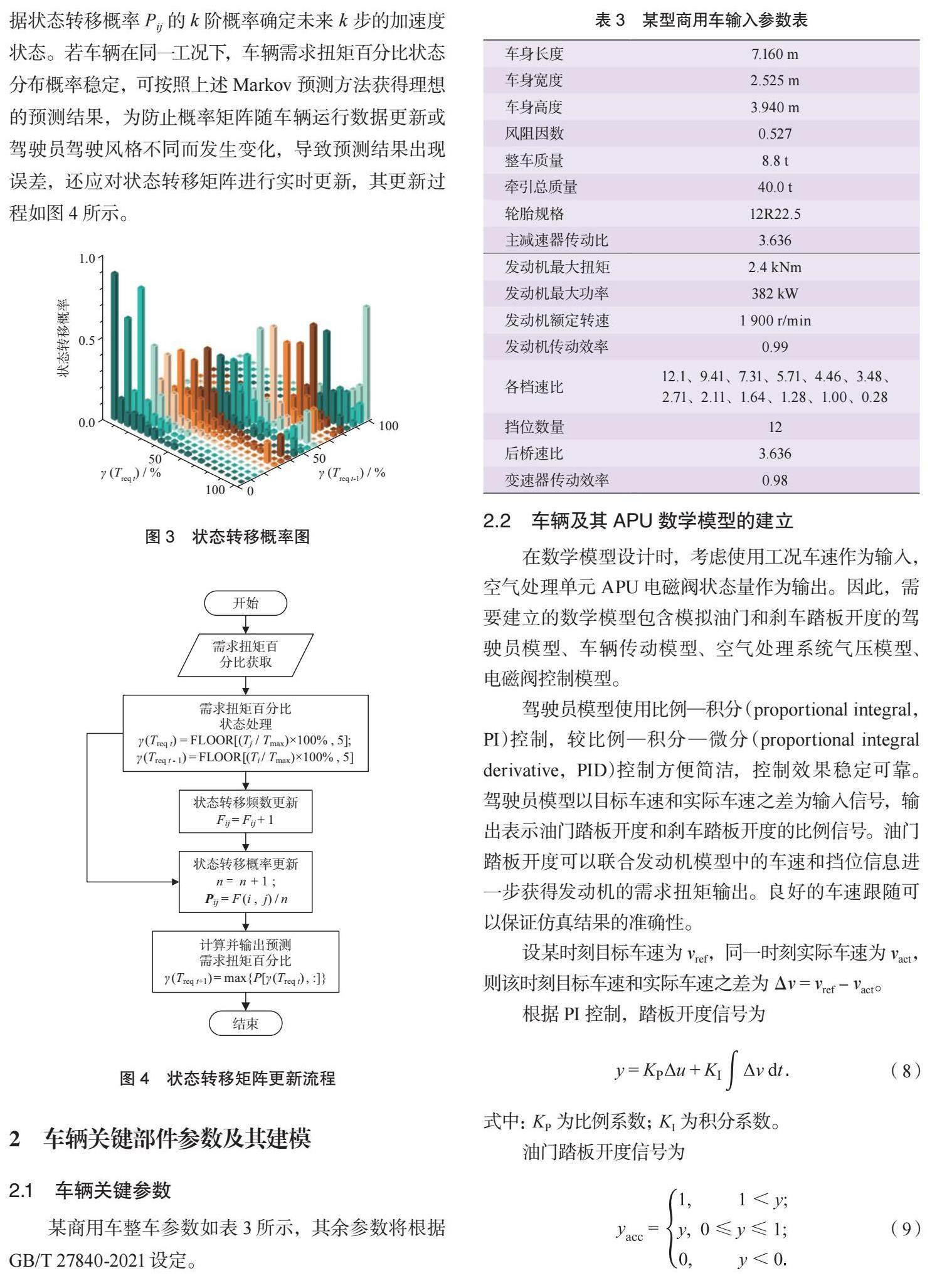
某商用車整車參數如表3 所示,其余參數將根據GB/T 27840-2021 設定。
2.2 車輛及其APU 數學模型的建立
數學模型設計時,考慮使用工況車速作為輸入,空氣處理單元APU 電磁閥狀態量作為輸出。因此,需要建立的數學模型包含模擬油門和剎車踏板開度的駕駛員模型、車輛傳動模型、空氣處理系統氣壓模型、電磁閥控制模型。
駕駛員模型使用比例—積分(proportional integral,PI)控制,較比例—積分— 微分(proportional integralderivative,PID)控制方便簡潔,控制效果穩定可靠。駕駛員模型以目標車速和實際車速之差為輸入信號,輸出表示油門踏板開度和剎車踏板開度的比例信號。油門踏板開度可以聯合發動機模型中的車速和擋位信息進一步獲得發動機的需求扭矩輸出。良好的車速跟隨可以保證仿真結果的準確性。
設某時刻目標車速為vref,同一時刻實際車速為vact,則該時刻目標車速和實際車速之差為Δv = vref - vact。
根據PI 控制,踏板開度信號為
2.3 控制系統Simulink 模型建立空氣處理單元APU 系統仿真模型主要由整車模型、控制器模型和儲氣筒氣壓模型組成。為快速構建APU 系統仿真模型,降低模型搭建難度和模型階次,本文建立的系統模型將基于以下假設:
發動機扭矩計算忽略加速阻力和坡道阻力;儲氣筒內壓縮空氣視為理想氣體,其壓縮因子Z = 1;儲氣筒內壓縮空氣消耗視為勻速消耗,其總消耗量由同等質量條件的轉轂實驗得出。
根據式(8)—式(16), 建立某商用牽引車輛及其空氣處理系統仿真模型,系統仿真模型如圖5 所示。
在APU 模型中,電磁閥決策模塊使用并行狀態機實現,APU 的狀態切換和APU 的模式切換2 個子模塊都處于活動狀態。其中,APU 狀態子模塊中的氣壓工作區間由APU 模式子模塊決定并發送至APU 狀態子模塊。該模型以發動機轉速為輸入,以電磁閥狀態xv1和xv2、空氣壓縮機負載時間tdur、儲氣筒氣壓值p 為輸出。
3 結果及分析
3.1 模式識別和預測分類結果
為驗證模式識別和預測分類方法的有效性,在中國重型商用車瞬態工況(China World Transient VehicleCycle,C-WTVC)的車速輸入下,分別對加速度分類、神經網絡識別分類、神經網絡識別和Markov 鏈預測分類的工況分類方法進行仿真,輸出電控空氣處理單元APU 的工作模式,仿真輸出C-WTVC 工況車速下的電控APU 工作模式分類結果如圖6 所示,其中,“模式1”表示低壓模式,“模式2”表示基礎模式,“模式3”表示高壓模式。
通過與加速度分類和模式識別分類方法進行對比,基于神經網絡識別和Markov 鏈預測的電控APU 控制方法模式切換頻次較其他方法明顯降;另外,通過觀察分類結果和車速可以發現,該方法對細微的車輛狀態變化判斷更加準確、避免了APU 工作模式頻繁切換。相比于加速度分類方法,該方法使得APU 工作模式可以穩定應對突然變化的速度需求和發動機扭矩需求,具有較好的魯棒性。
3.2 電控APU 仿真結果及分析
采用C-WTVC 車速作為輸入,在儲氣筒初始氣壓值設定為1.0 MPa、車輛牽引質量30 t 條件下,對單一工作模式的機械式空氣處理單元APU 和加速度分類、神經網絡識別分類、神經網絡識別和Markov 鏈預測分類的工況分類方法分別進行仿真。APU 各模式仿真切斷閥狀態結果如圖7 所示,其中“狀態1”表示切斷電磁閥xv1 通電,此時空氣壓縮機不工作;“狀態0”表示切斷電磁閥xv1 不通電,空氣壓縮機工作。基于神經網絡識別和Markov 鏈預測控制以及基于調壓閥控制的APU,空氣壓縮機的瞬時功率Pins 曲線如圖8 所示。
記錄機械式APU 仿真實驗結果和多模式電控APU 各工作模式仿真數值結果,以機械式APU 臺架實驗數值結果作為對照,APU 各工作模式實驗數值結果如表5 所示。其中: tdur 為空氣壓縮機工作時間,γ(tdur)為空氣壓縮機占空比,Pcom 為空氣壓縮機功耗,nv1 為切斷(電磁)閥換向次數。表5 中,機械式APU 臺架實驗結果為機械式APU 在3 輪C-WTVC 工況下的實驗結果平均值。仿真實驗與臺架實驗的空氣壓縮機占空比絕對誤差約為3%。考慮到臺架實驗中空氣壓縮機轉速值獲取過程包含車輛換檔時的動力銜接和行駛阻力等因素,認為該仿真實驗結果具有參考意義。
由表5 可知:在C-WTVC 工況下,通過對駕駛工況識別和分類的APU 控制策略相較于機械式APU 的氣壓控制方法可以顯著降低空氣壓縮機的工作時間,占空比下降約12%;在空氣壓縮機功耗方面,電控APU 控制策略使空氣壓縮機功耗下降約480 kWh,功率消耗下降約34.7% ;基于神經網絡識別和Markov 鏈預測分類的APU 控制策略較其他2 種控制策略在能耗方面優勢不明顯,但較其他2 種控制方法降低了電磁閥的換向次數,減少了電磁閥的工作強度,起到了節能和增加電磁閥使用壽命的效果。
4 結 論
本文基于發動機工況識別和預測,提出的一種具有3 種工作模式的商用車空氣處理單元APU 控制策略,建立了該車輛和空氣處理系統的Matlab/Simulink 系統仿真模型。
在中國重型商用車瞬態工況(C-WTVC) 工況下,該電控APU 相較單一模式的APU 減少了12% 的空氣壓縮機工作時間,降低了空氣壓縮機的能量消耗約34.7%。
該電控APU 能夠對不同扭矩需求百分比所處的工況進行識別和分類,使控制單元準確控制APU 工作模式。在車輛應對爬坡和超車等復雜工況時,該控制策略的應用降低了發動機附件的功率消耗,燃油經濟性得到了顯著改善。
參考文獻 ( References)
[1] LIU Dahui, Eksioglu B, Schmid M J, et al. Optimizingenergy savings for a fleet of commercial autonomoustrucks [C]// IEEE Trans Intel Transp Syst, 2022, 23(7):7570-7586.
[2] 李耀華, 何杰, 范吉康. 基于多MAP 圖的商用車電動助力轉向控制策略[J]. 汽車安全與節能學報, 2022, 13(1):86-94.
LI Yaohua, HE Jie, FAN jikang. Control strategy ofelectric power steering for commercial vehicle based onMulti-MAP [J]. J Autom Safe Energ, 2022, 13(1): 86-94.(in Chinese)
[3] 楊凡, 顧杰, 黃凡, 等. 商用車氣壓電子駐車系統坡道輔助控制方法[J]. 液壓與氣動, 2021, 45(8): 145-153.
YANG Fan, GU Jie, HUANG Fan, et al. Hill startassistance control method of commercial vehicle withelectronic air parking brake system [J]. Chin HydrauPneumatics, 2021, 45(8): 145-153. (in Chinese)
[4] 同曉雅, 杜彬, 任靜媛, 等. 基于商用車的電子駐車制動控制系統研究[J]. 汽車電器, 2022(10): 65-66+69.
TONG Xiaoya, DU Bin, REN Jingyuan, et al. Researchon electronic parking brake control system based oncommercial vehicle [J]. Auto Electric Parts, 2022(10): 65-66+69. (in Chinese)
[5] 張文斌, 王濤, 丁萬興, 等. 重型商用車電子電氣架構的規劃[J]. 汽車電器, 2021(1): 30-34. ZHANG Wenbin,
WANG Tao, DING Wanxing, et al. Planning of electronicand electrical architecture of heavy commercial vehicle [J].Auto Electric Parts, 2021(1): 30-34. (in Chinese)
[6] 楊長偉. 商用車制動系空氣管理系統研究仿真[D]. 吉林:吉林大學, 2018.
YANG Changwei. Research and simulation of airmanagement system of commercial vehicle brake system[D]. Jilin: Jilin University. 2018. (in Chinese)
[7] Park W K, Mun S D, Lee H K, et al. Optimization ofdrying performance considering driving conditions [J].Int.J Automot. Technol. 12, 705 (2011).
[8] 項小雷, 李松松. 鍵合圖理論在商用車氣制動系統空氣干燥器響應特性分析中的應用[J]. 汽車技術, 2012(10): 32-35+61.
XIANG Xiaolei, LI Songsong. Application of bond graph theory on air dryer response characteristic analysis of theair brake system for commercial vehicles [J]. Auto Tech,2012(10): 32-35+61. (in Chinese)
[9] 張旗, 嚴天一, 趙燕樂. 具有多工作模式的電機式主動橫向穩定器控制策略研究[J]. 機械科學與技術, 2023,42(5): 793-801.
ZHANG Qi, YAN Tianyi, ZHAO Yanle. Research oncontrol strategy of a motor-type active anti-roll stabilizerwith multiple operating modes [J], Mech Sci Tech AerospEngi, 2023, 42(5): 793-801. (in Chinese)
[10] 李耀華, 劉洋, 馮乾隆, 等. 基于最優預瞄和模型預測的智能商用車路徑跟蹤控制[J]. 汽車安全與節能學報,2020, 11(4): 462-469.
LI Yaohua, LIU Yang, FENG Qianlong, et al. Pathtracking control for an intelligent commercial vehiclebased on optimal preview and model predictive [J]. JAutom Safe Energ, 2020, 11(4): 462-469. (in Chinese)
[11] 史培龍, 趙軒, 陳子童, 等. 基于道路行駛工況辨識的重型載貨汽車排氣制動系統主動控制研究[J]. 汽車工程,2023, 45(1): 104-111+146.
SHI Peilong, ZHAO Xuan, CHEN Zitong, et al. Studyon active control of exhaust brake system for heavydutytruck based on road driving condition recognition[J]. Autom Engineering, 2023, 45(1): 104-111+146. (inChinese)
[12] 蔡偉. 基于車速預測的電動商用汽車能量管理策略研究[D]. 成都: 西華大學, 2022.
CAI Wei. Research on energy management strategy ofelectric commercial vehicles based on condition prediction[D]. Chengdu: Xihua University, 2022. (in Chinese)
[13] 郇浪浪, 田雪毅, 趙鵬昌, 等. 空氣處理單元的原理及實現方式研究[J]. 汽車實用技術, 2021, 46(11): 196-198.
HUAN Langlang, TIAN Xueyi, ZHAO Pengchang, etal. Study on the Principle and Implementation of AirTreatment Unit [J], Auto Appl Tech, 2021, 46(11): 196-198.(in Chinese)
[14] 呂征, 李法兵, 陳首剛. 商用車電控空氣干燥器性能研究及應用[J]. 汽車實用技術, 2018(20): 159-162.
L? Zheng, LI Fabing, CHEN Shougang. Propertiesand application of electronic controlled air dryer forcommercial vehicles [J], Auto Appl Tech, 2018(20): 159-162. (in Chinese)
[15] 中華人民共和國工業和信息化部. 重型商用車輛燃料消耗量測量方法: GB/T 27840-2021 [S]. 北京: 中國標準出版社, 2021.
Ministry of Industry and Information Technology ofthe Peoples Republic of China. Fuel consumption testmethods for heavy-duty commercial vehicles: GB/T27840-2021 [S]. Beijing: Standards Press of China, 2021.(in Chinese)
[16] JIE Xing, HAN Xuefeng, YE Hui, et al. Driving cyclerecognition for hybrid electric vehicle [C]// ITEC Asia-Pacific, 2014: 1-6.
[17] 劉靈芝, 張冰戰, 蔣通. 基于工況自適應的PHEV 等效燃油最小策略[J]. 汽車安全與節能學報, 2020, 11(3): 371-378.
LIU Lingzhi, Zhang Bingzhan, JIANG Tong. Equivalentconsumption minimization strategy for PHEV based ondriving condition adaptation [J]. J Autom Safe Energ,2020, 11(3): 371-378. (in Chinese)
[18] FENG Lei, LIU Wenjia, CHEN Bo. Driving patternrecognition for adaptive hybrid vehicle control [J]. SAEInt J Alt Power, 2012, 1(1): 169-179.
[19] Ericsson E. Independent driving pattern factors and theirinfluence on fuel-use and exhaust emission factors [J].Transp Res Part D: Transp Environ, 2001, 6(5): 325-345.
[20] 吳迪. ISG 混合動力汽車能量優化管理策略研究[D]. 合肥: 合肥工業大學, 2013: 75-88.
WU Di. Research on energy optimal management controlstrategy for ISG hybrid electric vehicle [D]. Hefei: HefeiUniversity of Technology, 2013: 75-88. (in Chinese)
[21] 尹燕莉, 馬永娟, 周亞偉, 等. Markov 鏈與Q-Learning算法的超輕度混動汽車模型預測控制[J]. 汽車安全與節能學報, 2021, 12(4): 557-569.
YING Yanli, MA Yongjuan, ZHOU Yawei, et al. Modelpredictive control of super-mild hybrid electric vehiclebased on Markov chain and Q-Learning [J]. J Autom SafeEnerg, 2021, 12(4): 557-569. (in Chinese)
[22] 付翔, 鐵鑫, 劉會康. 基于需求功率預測的混合動力越野車能量管理[J]. 江蘇大學學報( 自然科學版), 2021,42(1): 67-76.
FU Xiang, TIE Xin, LIU Huikang. Energy managementof hybrid off road vehicles based on demand powerprediction [J]. J Jiangsu Univ (Nat Sci Ed), 2021, 42(1):67-76. (in Chinese)
猜你喜歡
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
能源工程(2020年6期)2021-01-26 00:55:22
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
山東冶金(2019年3期)2019-07-10 00:54:04
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
消費導刊(2018年10期)2018-08-20 02:57:02
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
通信電源技術(2016年1期)2016-04-16 04:57:26
汽車與新動力(2015年1期)2015-02-27 12:11:01