轉爐爐門式測溫取樣裝置的研究與應用
2023-04-29 02:59:20趙景泉
冶金信息導刊 2023年1期
趙景泉
摘 要:通過對一種轉爐爐門式自動測溫取樣裝置機械機構、程序設計等方面的闡述,提出了轉爐爐門式自動測溫取樣裝置的應用方案,實現了轉爐測溫取樣的機械化及自動化,取得了較好的社會效益。
關鍵詞:轉爐;測溫;取樣
RESEARCH AND APPLICATION OF DOOR TYPE TEMPERATURE MEASURING AND SAMPLING DEVICE FOR CONVERTER
Zhao Jingquan
(Laiwu Branch Steelmaking Plant of Shandong Iron and Steel Co., Ltd. Jinan 271104, China)
Abstract:Through the description of the mechanical mechanism and program design of a converter door type automatic temperature measuring and sampling device, the application scheme of the converter door type automatic temperature measuring and sampling device is proposed, which realizes the mechanization and automation of converter temperature measuring and sampling, and achieves good social benefits.
Key words:converter;temperature measurement;sampling
1 概 述
轉爐因沒有副槍系統,對轉爐冶煉完畢后成分和溫度的分析都要依靠人工進行取樣化驗和溫度測定。因測溫、取樣過程中,轉爐爐口必須搖至爐前平臺測,且爐口角度與垂直位置約80°~84°,作業人員測溫、取樣過程中離爐口較近,一是高溫鋼水輻射熱嚴重,操作人員作業環境溫度高,二是補爐后可能出現補爐材料塌落,造成爐口噴火,燒傷作業人員。
因此,迫切需要在轉爐實現自動測溫取樣,減輕工人勞動強度和作業安全風險,基于此背景,本文對一種爐門式自動測溫取樣裝置的設計、應用進行詳細論述。
2 總體設計思路
該自動測溫取樣裝置安裝于轉爐爐前擋火門上,其工作時需要將轉爐爐口搖至爐前平臺,爐口與垂直位置夾角為80°~84°。需具備的基本功能為測溫取樣槍桿插入、退回功能,測溫取樣槍桿執行機構旋轉功能,測溫取樣槍桿執行機構及旋轉機構橫移功能。
基于以上,基本確定本設計的方案為:
1)在一側爐門上安裝一段導軌,在導軌上安裝一臺小車,小車通過車輪懸掛于導軌上,并且通過齒輪齒條的形式驅動小車可以進行橫移。
2) 在橫移小車上安裝測溫取樣槍桿執行機構,且在小車上安裝一臺液壓缸,驅動測溫取樣槍桿執行機構進行旋轉。
3)測溫取樣槍桿執行機構采用摩擦傳動的方式,即通過兩組滾輪夾持住測溫取樣槍桿,其中一組滾輪的一個輪上安裝驅動減速機,利用滾輪與槍桿間的摩擦力實現槍桿的插入、退回。
4) 小車的橫移,測溫取樣槍桿執行機構的旋轉、測溫取樣槍桿的插入/退回均采用編碼器進行位置檢測。
5)通過PLC進行控制,通過自動化程序實現測溫取樣裝置各動作自動化。
3 測溫取樣主槍桿執行機構設計
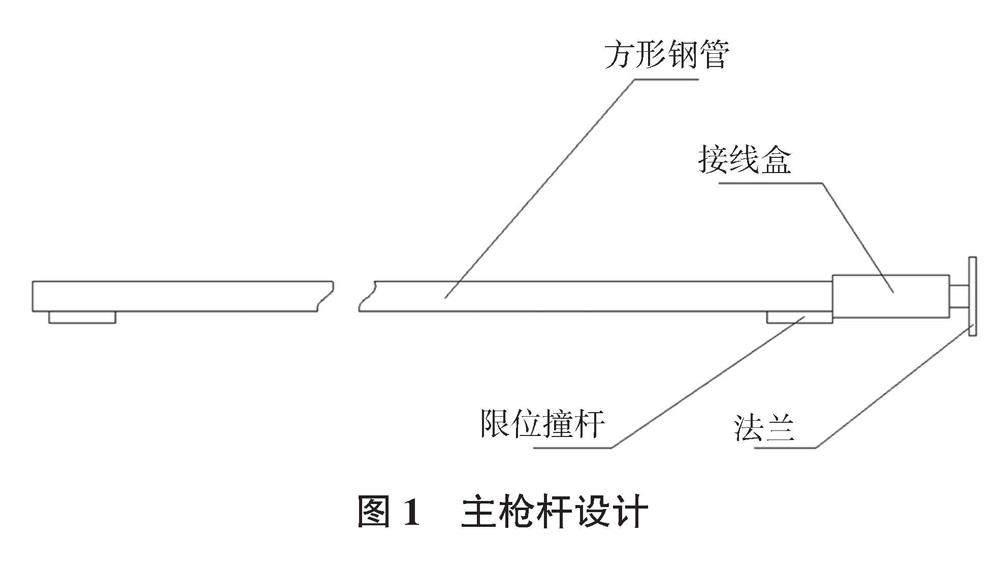
圖1為主槍桿的設計:
1)為縮短主槍桿的行程,便于縮小機構體積,因此爐內測溫取樣點盡可能靠近爐帽位置,同時主槍桿工作角度(與主槍桿垂直位置間的夾角)盡量小,但要充分考慮設備的安裝高度,否則不便于設備的檢修。
2)為降低設備成本,主槍桿采用成品的
40 mm×40 mm×4 mm規格的方形鋼管,為便于測溫補償導線的連接,在主槍桿前端設計接線盒,接線盒盒蓋通過螺栓固定,既方便拆卸,又可防止爐渣進入燒壞補償導線。
3)在主槍桿的兩端安裝限位撞桿,實現插入、退出極限位置檢測。
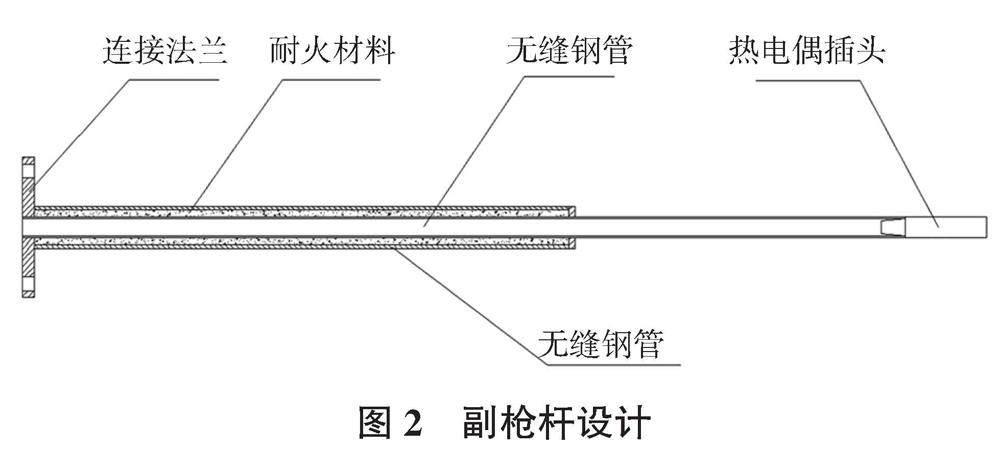
4 副槍桿的設計
測溫、取樣探頭直接安裝于副槍桿,副槍桿部分要進入爐內,并且與轉爐爐渣接觸,要考慮副槍桿內補償導線的防護。
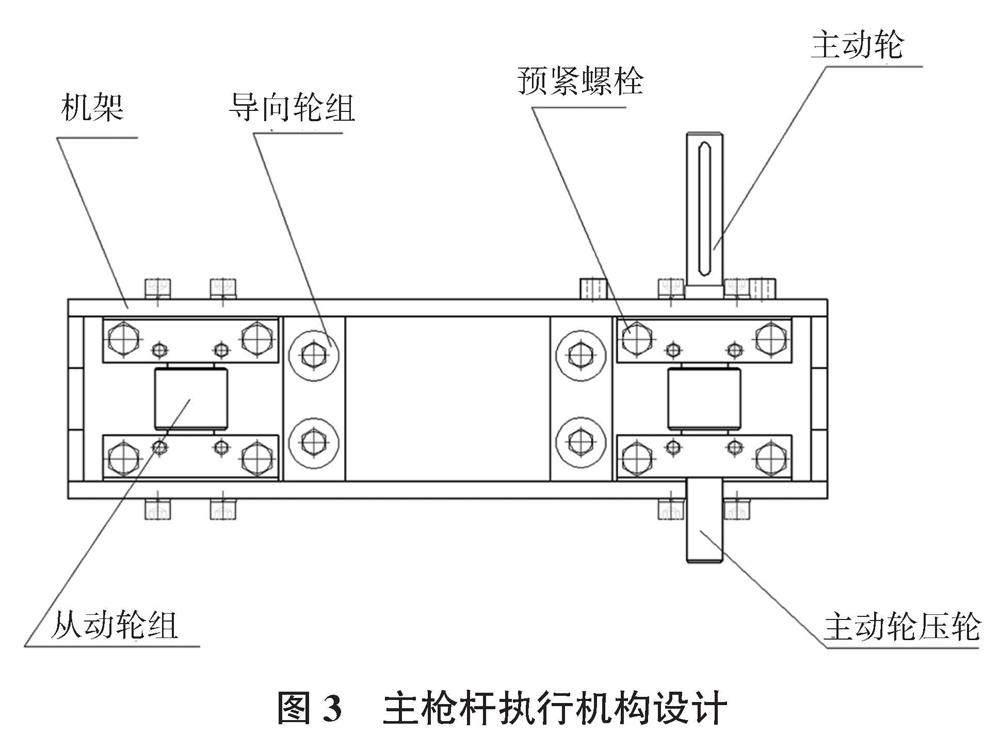
5 主槍桿執行機構參數設計
主槍桿執行機構采取兩組輥子夾持主槍桿,其中一組輥子中一個輥子通過減速電機驅動,依靠驅動輪與主槍桿之間的摩擦力帶動主槍桿實現前進、后退。為保證編碼器能真實反映主槍桿運行位置,編碼器必須安裝于主動輪壓緊輪輪軸上。為防止因主槍桿變形后在通過兩組夾持輥時產生矯直力,導致主動輪驅動力不足,從動輪及其壓輪不能壓緊主槍桿,要留有一定的間隙。為防止主動輪預緊螺栓預緊力穩定,要配合幾組碟簧使用。
主槍桿運行速度選擇1.5 m/s左右為宜,驅動輪設計為70 mm,則驅動輪轉速可通過式(1)計算:
n=v/(π×D)× 60? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? (1)
式中:v為主槍桿運行速度, v=1.5 m/s;D為驅動輪直徑, D=0.07 m
上述數據帶入式(1)得:
n=1.5/(3.14×0.07)×60=409 r/min
電機轉速為1 500 r/min,則減速機的速比
i=1 500/409=3.66,選取速比i=4,通過式(1)可求得主槍桿最大運行速度為v=1.37 m/s。
電機功率可通過下式計算:
P=G×g×k×r/i×n/9 550? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?(2)
式中:G—主槍桿、副槍桿、測溫取樣探頭總質量,經計算G=38 kg;g為重力加速度,取g=10 m/s2;k—安全系數,考慮槍桿運行過程中的附加阻力,取k=2;r為主動輪半徑,r=0.035 m;i為減速機速比,i=4;n為電機轉速,n=1 500 r/min
上述數據帶入式(2)得:
P=38×10×0.035/4×1 500/9 550=1.05 kW,取P=1.1 kW
為使驅動輪和槍桿之間的摩擦力能夠提供主槍桿的驅動力,則需要對驅動輪壓緊輪螺栓進行預緊,預緊力矩可通過式(3)計算:
T=K×d×9 550×P/n×i/r/μ? ? ? ? ? ? ? ? ? ? ? ? ? (3)
式中:K—擰緊力矩系數,查表得K取0.22;P為電機功率,P=1.1 kW;n為電機轉速,n=1 500 r/min;i為減速機速比,i=4;r為驅動輪半徑,r=0.035 m;μ為鋼-鋼動摩擦系數,取μ=0.15
將上述數據帶入式(3)得:
T=0.22×0.02×9 550×1.1/1 500×4/0.035/0.15=
23.5 N·m
因預緊螺栓一共四組,所以每組螺栓的預緊力矩為23.5 N·m/4=5.88 N·m。
6 自動化程序設計
6.1 自動測溫取樣裝置動作流程
自動測溫取樣自動過程為:橫移小車運行至設定位置(編碼器檢測)→主槍桿執行機構開始旋轉至設定位置(編碼器檢測)→主槍桿開始插入至指定位置(編碼器檢測)→停留5 s(取樣、測溫)→主槍桿退回至初始位置→主槍桿執行機構旋轉至初始位置→橫移小車運行至初始位置→動作完成。
6.2 程序設計需要注意的問題
1)為防止編碼器失靈造成的設備誤動作造成設備損壞,所有編碼器增加動作檢測,即動作開始后指定的時間內編碼器計數達不到預定值則視為編碼器故障,設備自動停止并提示故障。
2)為防止主槍桿執行機構旋轉初始限位短路時導致主槍桿執行機構不選擇而小車直接橫移導致主槍桿損壞,應在主槍桿退回到初始位置后延時一定時間再檢測主槍桿執行機構初始限位反饋信號。
3)橫移小車最大極限位置限位、主槍桿執行機構旋轉最大極限限位僅用于手動過程中起控制作用,不參與自動過程控制,防止該兩處限位故障造成設備誤動作。
6.3 操作界面應具備的基本功能
1)自動測溫開始、急停、復位功能。
2)橫移小車工作位置設定,當前位置顯示。
3)主槍桿執行機構旋轉角度設定,當前角度顯示。
4)主槍桿工作位置設定,當前位置顯示。
5)測溫、取樣探頭停留時間設定。
6)所有限位反饋顯示。
7 結 語
本自動測溫取樣裝置的應用具有投入成本低、功能全面,應用后大大降低了職工的勞動強度及安全風險,具有較好的社會效益。