動態人工勢場法的無人船避障路徑規劃
2023-05-04 14:01:42賈立校
艦船科學技術 2023年5期
關鍵詞:規劃
劉 濤,賈立校,曹 翔
(江蘇航運職業技術學院 航海技術學院,江蘇 南通 226010)
0 引 言
無人船是一種無需遙控、可通過衛星進行定位、依據自身傳感器執行任務的全自動水面機器人,其主要用于海洋地形的測繪、水文和水質監測等[1]。路徑規劃是移動物體起點坐標和終點坐標序列點的連接曲線,無人船在任務執行過程中[2],能夠依據任務需求完成航行路徑規劃。但是海上環境復雜多變[3],也會存在較多的障礙物,因此,在路徑規劃過程中,需充分考慮對于障礙物的躲避情況。玄世龍等[4]為實現無人船路徑規劃,獲取最佳的航行路線,其通過禁忌搜索算法獲取柵格地圖中的無人船航行路徑,求解其中的最優路徑,完成規劃。但是該方法在應用過程中,如果存在移動障礙物時,則路徑規劃效果存在一定偏差。寧君等[5]為實現無人船路徑規劃,以無人船航行的實際環境為基礎,對路徑特征進行量化處理后,完成路徑規劃,但該方法無法獲取障礙物和無人船的會遇時間。動態人工勢場法屬于一種改進的人工勢場法,將用于描述障礙物移動信息的趨勢參數,引入至斥力函數中,以此保證在動態運行環境中應用效果。因此,本文提出動態人工勢場法的無人船避障路徑規劃方法。
1 無人船避障路徑規劃
1.1 無人船避障路徑規劃方法框架
本文在動態人工勢場法的基礎上對其進行優化,提出相關的無人船避障路徑規劃方法,整體框架如圖1 所示。整體包含全局和局部避障路徑規劃2 個部分,全局路徑規劃是以任務執行指令和海上環境為參考,構建海上航行柵格地圖,并依據無人船起始位置和目標位置之間的相關信息,通過A*算法進行全局路徑規劃,獲取最優路徑規劃結果以及無人船的全局的路徑節點;將獲取的全局路徑節點作為局部路徑的開始節點,結合無人船航行過程中采集的環境實時信息,分析環境的變化情況,如果環境中存在障礙物,則通過動態人工勢場法進行障礙物規避,實現無人船避障路徑規劃,并對規劃結果進行改進。

圖1 無人船避障路徑規劃方法框架Fig.1 Obstacle avoidance path planning method framework for unmanned ships
1.2 無人船全局路徑規劃
本文在進行無人船全局路徑規劃時采用A*算法完成,其在進行路徑規劃過程中,能夠通過給定的啟發函數減少搜索節點數量,以此可顯著提升路徑搜索效率。該算法的評價函數F(k)計算公式為:
式中:g(k) 為路徑起點位置到當前位置的實際消耗;h(k)為啟發函數。
該算法在進行無人船全局規劃時的步驟如下:
1) 定義無人船的初始位置和目標位置;
2) 通過A*算法按照一定方向進行目標位置搜索,獲取和當前位置之間F(k)最小的位置;
3) 將上述獲取的位置作為下一個起點,繼續獲取和該位置之間F(k)最小的位置。以此循環獲取目標位置,獲取全局的路徑節點和路徑規劃結果。
1.3 無人船局部路徑規劃實現方法
通過A*算法獲取最優路徑規劃結果以及無人船的全局路徑節點后,進行局部避障路徑規劃。采用動態人工勢場法有效避免基礎人工勢場法在障礙物較多環境中發生的最小值陷阱現象,提升避障路徑規劃效果。結合動態人工勢場法概念可知:在運動環境內,無人船運動目標位置和環境中存在的障礙物均會對無人船造成影響,會形成斥力和引力2 種勢場,利用引力和斥力2 種函數分析無人船在該環境中的勢場。進行避障路徑規劃時,相對位置、相對速度分別用 κ,μ表示,前者對應無人船初始位置和目標位置之間,后者對應初始速度和目標點之間,在此基礎上完成無人船引力勢場函數f(x)的建立,即
式中:ε 和 φ均為常量,前者為正,后者為負,均對應引力勢場中。
依據f(x)計算無人船在當前運動環境中受到目標位置的引力值U(X,V),其計算公式為:
式中:F*(X)為無人船的引力方向;F*(V)為 μ方向的引力向量。
在進行無人船避障路徑規劃時,無人船對于目標位置的追蹤由F*(X)決定,無人船趨向目標位置速度則由F*(V)決定。依據無人船和障礙物之間的相對位置,建立無人船斥力勢場函數f(y),其表達公式為:
式中:c,h,a均為斥力勢能,以此分別對應距離因素對于無人船、相對速度對于無人船、相對加速度對于無人船;γ為障礙物和無人船之間的歐式距離;φ,ω均為比例增益系數,前者為正,后者為負;ξ 為整體增益指數。
依據f(y)計算無人船在當下運動環境中受到來自障礙物的斥力值U(X,V,A),其表達式為:
式中:c0,h0,a0均為斥力,依次分別對應 γ對無人船、相對速度對無人船、相對加速度對無人船;σ,τ,δ均為梯度,依次位于障礙物對于無人船形成的斥力場中、相對速度對無人船形成的斥力場中、相對加速度對無人船形成的斥力場中。
在動態環境中,斥力和引力2 種勢場結合對無人船形成的總勢場用U*表示,其計算公式為:
依據全局勢場函數計算無人船當前所在位置的全局勢能用U*(X)表示,其計算公式為:
式中:t,ei分別為無人船在單位時間內達到的目標位置和該位置的鄰域位置集。
如果U*(X)>0,則定義無人船在單位時間內可以達到的目標位置即為下一時刻的目標位置,同時將該位置劃分至避障路徑點集內,其對應的狀態即為目標狀態;如果U*(X)≤ 0,定義無人船在單位時間內可以達到的目標位置領域位置為下一時刻的目標位置,同時將該位置劃分至避障路徑點集內,其對應的狀態即為目標狀態。依據上述公式即可完成無人船在運動環境中所經過的全部故障點確定,并輸出避障路徑規劃結果。
1.4 無人船避障路徑規劃優化
動態人工勢場法雖然能夠有效避免發生最小值陷阱現象,但無人船航行環境為未知情況下,適應能力會受到一定影響,導致對避障路徑規劃效果較差;當障礙物移動速度較快時存在信息缺失情況,無法精準掌握障礙物情況。因此,為保證無人船避障路徑規劃效果,采用長短記憶循環神經網絡和強化學習算法相結合的方式對動態人工勢場法進行改進,提升應用效果。以無人船在當前時刻的信息輸出結果為基礎,結合無人船之前的信息變化情況,對障礙物運動情況進行預測后獲取障礙物預測狀態空間S0,在此基礎上對動態人工勢場法對于障礙物檢測半徑R進行調整,完成對運動障礙物的跟蹤,保證該方法在障礙物運動速度較快時,依舊能夠可靠獲取障礙物信息,保證無人船避障路徑規劃效果。其詳細步驟如下:
1) 依據動態人工勢場法獲取的避障路徑規劃結果,確定該方法的檢測半徑R;
2) 依據該半徑結果獲取整體可檢測的圓形結果T和障礙物斥力場之間存在的接觸點數量n,并確定n的分布情況,將該情況輸入長短記憶循環神經網絡中;
3) 獲取S0結果,以S0的空間位置和無人船狀態為依據,對R進行調整。
在該步驟中,將獲取的S0輸入至強化學習算法中,并依據無人機狀態空間S設置回報函數 ψ,以此保證無人船可為通過最佳的回報完成動態障礙物的躲避,無人船和障礙物間的距離計算公式為:
式中:r為障礙物斥力場半徑;da1a2為2 個圓交點之間的距離。
在此基礎上設定 ψ結果:
式中:υ為無人船航行速度,在該速度下航行用υ×Δt表示;dsafe為安全距離。
如果ψ=-1,表示該規劃路徑不會發生碰撞;反之ψ=1,表示該規劃路徑會發生碰撞。
2 實驗結果分析
以LB-110 型號無人船作為實驗對象,采用本文方法對其進行避障路徑規劃,獲取相關規劃結果,衡量本文方法的應用效果。無人船主要是用于采樣監測,其重量為20 kg,采樣流量為2 個2.5 L/min,其帶寬信號為100 kHz。參數設定:無人船初始位置坐標為(115°06' 02E,22°26' 02N),目標點位置坐標為(115°09'05E,22°33' 04N);引力場和斥力場2 種系數取值分別設定為0.000 1 和1,步長為0.1 m。
無人船全局路徑的最優規劃結果如圖2 所示。可知,本文方法應用后,能夠依據無人船初始位置和目標點位置獲取全局最優路徑規劃結果,并且可依據可規劃結果生成無人船的路徑規劃柵格地圖結果。
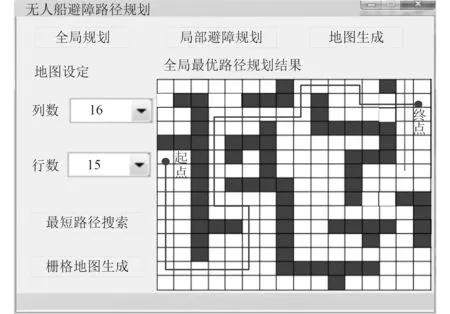
圖2 無人機全局路徑的最優規劃結果Fig.2 Optimal planning results of UAV global path
獲取本文方法在存在運動障礙物的復雜環境中,對于無人船的避障路徑規劃結果,如圖3 所示。可知,本文方法應用后,無人船在運動過程中,即使在遇見運動障礙物的環境中,也能夠有效完成障礙物躲避,避免發生碰撞現象,并完成運動路徑規劃。

圖3 無人船的局部避障路徑規劃效果Fig.3 Local obstacle avoidance path planning effect of unmanned ship
采用碰撞危險度作為評價指標,其包含空間和時間碰撞危險度,2 個指標的計算結果如表1 所示。可知,在障礙物移動速度不斷增加的情況下,本文方法應用后,空間碰撞危險度和時間碰撞危險度2 個指標的結果均滿足應用需求。其中,空間碰撞危險度值均大于4.26 m,其最大值為5.59 m,時間碰撞危險度的值均在15 s 以上,其最高值達到20.2 s。因此,本文方法應用效果良好,能夠極大程度避免無人船在路徑規劃過程中發生和障礙物碰撞情況。

表1 無人船碰撞危險度測試結果Tab.1 Test results of unmanned ship collision risk
3 結 語
無人船在任務執行過程中,為保證其在有效避免發生碰撞情況下,完成路徑規劃,保證無人船安全完成任務,本文提出動態人工勢場法的無人船避障路徑規劃方法。對該方法進行相關測試結果表明:本文方法具有較好的無人船避障路徑規劃能力,可在有效躲避移動障礙物的情況下,完成路徑規劃。
猜你喜歡
房地產導刊(2021年6期)2021-07-22 09:12:46
中國石油石化(2021年9期)2021-07-17 09:24:00
中國農民合作社(2020年12期)2020-12-18 09:09:58
公民與法治(2020年11期)2020-07-25 02:02:06
河南水利年鑒(2020年0期)2020-06-09 05:43:30
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
制造技術與機床(2017年3期)2017-06-23 08:11:34
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41