神經(jīng)過程和運動模型混合驅(qū)動的機(jī)動目標(biāo)跟蹤算法
2023-05-05 03:13:22朱洪峰熊偉崔亞奇王子玲
西安交通大學(xué)學(xué)報 2023年4期
關(guān)鍵詞:模型
朱洪峰,熊偉,崔亞奇,王子玲
(海軍航空大學(xué)信息融合研究所,264001,山東煙臺)
目標(biāo)跟蹤技術(shù)在軍用和民用兩個領(lǐng)域有著廣泛的應(yīng)用[1-2]。如今應(yīng)用較為廣泛的是Kalman濾波[3]、交互式多模型(interactive multiple-model,IMM)[4]以及在這兩種框架上發(fā)展、改進(jìn)而來的算法。但是,基于模型的經(jīng)典算法非常依賴先驗知識。隨著科學(xué)技術(shù)的發(fā)展,目標(biāo)的運動能力愈發(fā)強(qiáng)大,目標(biāo)跟蹤應(yīng)用的環(huán)境也愈發(fā)復(fù)雜,經(jīng)典目標(biāo)跟蹤算法越來越難以滿足應(yīng)用需求。近十年,深度學(xué)習(xí)技術(shù)得到了飛速發(fā)展,在許多領(lǐng)域有了廣泛的研究和應(yīng)用[5]。深度學(xué)習(xí)作為一種數(shù)據(jù)驅(qū)動方法,能夠從大數(shù)據(jù)中學(xué)習(xí)到顯式模型難以表達(dá)的潛在規(guī)律和趨勢。因此,許多學(xué)者將其應(yīng)用到目標(biāo)跟蹤中,利用神經(jīng)網(wǎng)絡(luò)學(xué)習(xí)目標(biāo)和環(huán)境的知識來提高經(jīng)典算法的效能,形成數(shù)據(jù)與模型混合驅(qū)動的目標(biāo)跟蹤算法。隨著計算機(jī)技術(shù)的不斷發(fā)展以及未來智能化的需求,混合驅(qū)動成為了目標(biāo)跟蹤技術(shù)的重要的發(fā)展趨勢之一[6]。
目前,混合驅(qū)動的目標(biāo)跟蹤相關(guān)研究可以總結(jié)為對經(jīng)典模型驅(qū)動算法的運動模型參數(shù)[7]、中間參數(shù)[8]以及估計輸出[9]這3個方面進(jìn)行估計和修正,使得經(jīng)典跟蹤算法的跟蹤性能有了一定的提升。但是,上述的同類文獻(xiàn)中的神經(jīng)網(wǎng)絡(luò)幾乎采用的都是有監(jiān)督學(xué)習(xí)的方式,需要優(yōu)化目標(biāo)的真值或者標(biāo)簽,如運動模型和真實軌跡。數(shù)據(jù)集是深度學(xué)習(xí)應(yīng)用面臨的阻礙之一[10],在實際的目標(biāo)跟蹤工程應(yīng)用中,目標(biāo)運動的成本和時機(jī)、電磁環(huán)境以及任務(wù)限制等客觀因素限制了采集到的數(shù)據(jù)集規(guī)模和質(zhì)量[11],而且許多復(fù)雜場景難以獲取理想的標(biāo)簽或者真值,這導(dǎo)致有監(jiān)督學(xué)習(xí)的方式難以真正實施和部署。無監(jiān)督學(xué)習(xí)的方式通常不需要優(yōu)化目標(biāo)的真值,對數(shù)據(jù)集的要求低。隨著目標(biāo)跟蹤應(yīng)用的環(huán)境越發(fā)復(fù)雜,研究探索無監(jiān)督學(xué)習(xí)的混合驅(qū)動目標(biāo)跟蹤算法對于工程實用有著重要意義。
現(xiàn)有的無監(jiān)督學(xué)習(xí)的目標(biāo)跟蹤算法大多采用時間序列處理領(lǐng)域的變分自編碼器(variational auto-encoder,VAE)[12]作為基本網(wǎng)絡(luò)結(jié)構(gòu),之后結(jié)合其他網(wǎng)絡(luò)進(jìn)行發(fā)展而來。文獻(xiàn)[13]使用循環(huán)神經(jīng)網(wǎng)絡(luò)和VAE構(gòu)建了一個貝葉斯濾波器進(jìn)行時間序列預(yù)測;文獻(xiàn)[14]使用了VAE來進(jìn)行自動駕駛中的軌跡重建和機(jī)動分類;文獻(xiàn)[15]將神經(jīng)網(wǎng)絡(luò)建模隨機(jī)過程,并利用VAE的架構(gòu)對參數(shù)求解,提出了神經(jīng)過程等。這些方法能夠通過無監(jiān)督的方式學(xué)習(xí)時間序列的建模和生成,但是解碼器直接使用神經(jīng)網(wǎng)絡(luò)輸出序列,直接用于目標(biāo)軌跡生成時,會導(dǎo)致輸出的目標(biāo)軌跡受量測影響嚴(yán)重,平滑性和動力學(xué)特征差,算法可解釋性差,也沒有充分利用已知的領(lǐng)域知識。因此,如何將領(lǐng)域知識與VAE充分結(jié)合,實現(xiàn)更加符合實際的時間序列處理器,也是當(dāng)下一個熱點研究問題[16]。
為了進(jìn)一步提高無監(jiān)督學(xué)習(xí)的目標(biāo)跟蹤算法的跟蹤效果,本文對神經(jīng)過程的解碼器使用了混合驅(qū)動的方式進(jìn)行重構(gòu),提出了一種混合驅(qū)動的神經(jīng)過程濾波器(hybrid-driven neural process filter, HD-NPF)。HD-NPF在解碼器部分使用神經(jīng)網(wǎng)絡(luò)作為數(shù)據(jù)驅(qū)動,估計每個滑動時間窗口內(nèi)的目標(biāo)運動的隨機(jī)微分方程的初值以及機(jī)動參數(shù),求解微分方程可得到目標(biāo)任意時刻的狀態(tài)估計,從而實現(xiàn)了混合驅(qū)動。目標(biāo)的動力學(xué)模型引導(dǎo)和約束了目標(biāo)軌跡生成過程,從而使得生成的軌跡更加平滑且具有動力學(xué)特征,也降低了神經(jīng)網(wǎng)絡(luò)的規(guī)模,提高了其學(xué)習(xí)效率。仿真結(jié)果表明,HD-NPF依賴先驗知識少,環(huán)境自適應(yīng)能力較之經(jīng)典目標(biāo)跟蹤算法更強(qiáng)。
1 問題描述
1.1 目標(biāo)運動的隨機(jī)微分方程
本文主要考慮目標(biāo)跟蹤中目標(biāo)的狀態(tài)估計(濾波)問題[17]。在實際場景中,目標(biāo)運動在時間上是連續(xù)的,加上環(huán)境中的擾動,目標(biāo)運動可通過Langevin隨機(jī)微分方程進(jìn)行建模[18]
(1)

對于dβ(t),從廣義上來看,其不僅包含了環(huán)境噪聲,還包含了當(dāng)目標(biāo)遇到未知情況進(jìn)行的人工調(diào)整、規(guī)避以及目標(biāo)跟蹤算法機(jī)動判斷延遲(算法需要累積一定量測才能判斷出目標(biāo)機(jī)動)帶來的誤差等,這些使得dβ(t)以及D(x(t),t)的數(shù)學(xué)形式非常復(fù)雜,甚至難以用數(shù)學(xué)模型明確表達(dá)。
因此,在復(fù)雜的機(jī)動場景中,難以獲得準(zhǔn)確先驗知識,難以精確設(shè)置式(1)的各部分,導(dǎo)致跟蹤受到影響。
1.2 神經(jīng)過程網(wǎng)絡(luò)
神經(jīng)過程(neural process, NP)[15]是一種將隨機(jī)過程和神經(jīng)網(wǎng)絡(luò)相結(jié)合的模型,其本質(zhì)是使用神經(jīng)網(wǎng)絡(luò)來參數(shù)化隨機(jī)過程的映射函數(shù),然后利用推導(dǎo)VAE的方式推導(dǎo)出NP的參數(shù)學(xué)習(xí)方式。NP的主要原理如下。
首先,定義一個隨機(jī)過程函數(shù)F:T →S,對于任意一個有限序列,表示為向量t1:n=(t1,t2,…,tn),ti∈T,i=1,2,…,n(i為序列索引),定義ρ為(F(t1),F(t2),…,F(tn))的邊緣分布,則有
ρ1:n(s1:n)=ρt1,…,tn(s1,…,sn)
(2)
上式滿足文獻(xiàn)[15]中的一致性和交換性時,對于F的一個實例化f,根據(jù)式(2)有
(3)
實際中的樣本y是存在量測噪聲的,類似高斯過程,NP將量測噪聲建模為Si~N (F(ti),σ2),即
(4)
將式(4)代入式(3),得到
(5)
然后,NP采用神經(jīng)網(wǎng)絡(luò)g重新建模F(ti),高維向量h作為輸入提供序列信息,即F(ti)=g(ti,h),式(5)可重新表示為
(6)
結(jié)合VAE的推導(dǎo)過程[12],引入h的變分先驗分布q(h|s1:n,t1:n),則似然函數(shù)p(s1:n|t1:n)的證據(jù)下限(evidence lower-bound,ELBO)表示為
Lp(s1:n|t1:n)=-KL(q(h|s1:n,t1:n)‖p(h))+
(7)
式中KL代表求取KL散度的函數(shù)。NP為了便于處理預(yù)測問題和使網(wǎng)絡(luò)更好地學(xué)習(xí)到正確的模型,其將數(shù)據(jù)集劃分為上下文信息t1:m、s1:m和目標(biāo)信息tm+1:n、sm+1:n,然后使用上下文信息q(h|s1:m,t1:m)作為先驗信息替代q(h|s1:n,t1-n),則預(yù)測分布p(sm+1:n|t1:m,s1:m)的ELBO為
Lp(sm+1:n|t1:n,s1:m)=
-KL(q(h|s1:n,t1:n)‖q(h|s1:m,t1:n))+
(8)
NP通過最小化式(8)來完成序列的無監(jiān)督學(xué)習(xí)。NP通過神經(jīng)網(wǎng)絡(luò)參數(shù)化隨機(jī)過程,靈活性強(qiáng),并且根據(jù)上下文信息預(yù)測目標(biāo)點的方式將部分訓(xùn)練轉(zhuǎn)移到測試時間,提高了效率。本文采用NP作為無監(jiān)督學(xué)習(xí)的網(wǎng)絡(luò)框架,對目標(biāo)的軌跡進(jìn)行學(xué)習(xí)和估計。
2 基于神經(jīng)過程的混合驅(qū)動濾波器
2.1 混合驅(qū)動解碼器
1.2小節(jié)分析了NP的基本原理,在應(yīng)用中x為時間或者控制量,y為時間序列。但是,由NP解碼器的生成過程(式(6))可以看到,生成的yi是相互獨立的,如果將y作為目標(biāo)軌跡序列,這顯然是不符合實際的。目標(biāo)狀態(tài)的轉(zhuǎn)移通常以一階Markov鏈建模,為了符合目標(biāo)跟蹤的變量設(shè)定,這里強(qiáng)調(diào):x和z分別表示目標(biāo)量測和狀態(tài)向量。令M表示目標(biāo)的運動模式或者對應(yīng)的參數(shù),可以得到聯(lián)合分布
p(z1:n,x1:n,h,M)=p(h)p(M0)p(x0)·
(9)

神經(jīng)網(wǎng)絡(luò)是一種數(shù)據(jù)驅(qū)動的方法,具有強(qiáng)大的非線性擬合和建模能力[20]。在復(fù)雜的機(jī)動場景中,目標(biāo)運動和環(huán)境難以建模,采用神經(jīng)網(wǎng)絡(luò)參數(shù)化式(1)得到神經(jīng)微分方程[21]是較好的選擇。但是,完全使用神經(jīng)網(wǎng)絡(luò)估計目標(biāo)軌跡并沒有利用好領(lǐng)域知識(如目標(biāo)遵從一些基本的運動規(guī)律),可解釋性差,且因為一般將網(wǎng)絡(luò)的維度設(shè)置較大而導(dǎo)致計算消耗大。因此,本小節(jié)提出了混合驅(qū)動解碼器,來替代NP的解碼器。

(10)

(11)
結(jié)合式(1)可以得到混合驅(qū)動的解碼器微分方程
(12)

t,t0,t1∈[k-l+1,k+1]
(13)
式中SDESolver為隨機(jī)微分方程(stochastic differential equation, SDE)的求解器。
式(12)根據(jù)目標(biāo)加速度模型,直接給定了目標(biāo)狀態(tài)與其微分的形式,這給神經(jīng)網(wǎng)絡(luò)的梯度優(yōu)化過程提供了方向,提高了解碼器的學(xué)習(xí)效率的同時減少了神經(jīng)網(wǎng)絡(luò)的規(guī)模,提高了算法的可解釋性。
2.2 HD-NPF框架結(jié)構(gòu)
將2.1小節(jié)提出的混合驅(qū)動解碼器與NP的解碼器相結(jié)合,得到了基于神經(jīng)過程的混合驅(qū)動濾波器(HD-NPF),其網(wǎng)絡(luò)結(jié)構(gòu)如圖1所示。
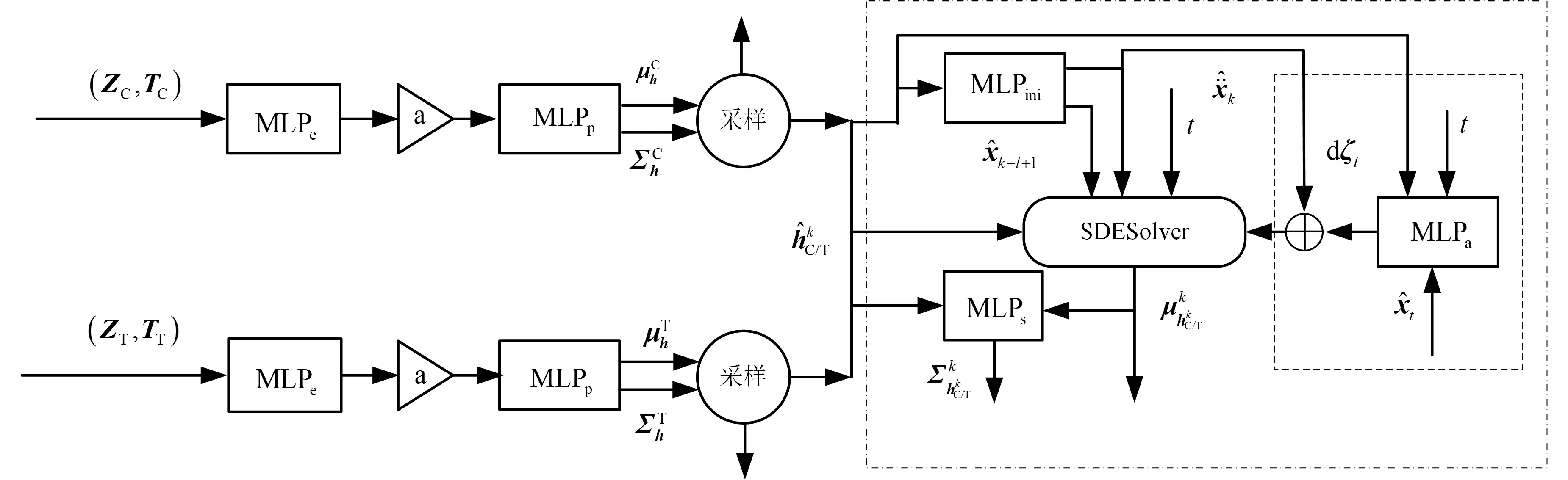
圖1 混合驅(qū)動神經(jīng)過程濾波器結(jié)構(gòu)Fig.1 Structure diagram of the hybrid-driven neural process filter
(14)
(15)

(16)

(17)
令目標(biāo)狀態(tài)為高斯分布(即使不服從高斯分布,神經(jīng)網(wǎng)絡(luò)會對其補(bǔ)償),同時令量測矩陣為
(18)
根據(jù)高斯分布的性質(zhì),得到似然函數(shù)
(19)
式中to表示HDF-NP輸出的目標(biāo)狀態(tài)估計的時刻點序列向量。
對比1.2小節(jié)和本小節(jié)HD-NPF和NP的原理可以發(fā)現(xiàn),兩者的本質(zhì)區(qū)別在式(6)和式(16)。即,HD-NPF在解碼器部分由于動力學(xué)約束p(xi|xi-1,h)導(dǎo)致其可能不再滿足NP的一致性和交換性,不能直接利用NP的ELBO計算方式和結(jié)論。因此,需要證明HD-NPF也是NP。



p((z1:n,x1:n),h)=p(Fθ(t))·
(20)
此時,式(20)與式(6)具有同樣的形式,因此HD-NPF也為一種NP,可以直接使用NP的結(jié)論。結(jié)合式(8)和式(16),令在當(dāng)前滑動窗口中算法生成的軌跡點數(shù)為Ng,可以得到HDF-NP的ELBO為
(21)
對比式(21)和式(8)可以發(fā)現(xiàn),HDF-NP的ELBO或者優(yōu)化目標(biāo)較之NP沒有變化,但是其內(nèi)部解碼器生成過程具有了動力學(xué)特征,目標(biāo)狀態(tài)相互之間具有Markov性,算法的可解釋性提高。而且,相較NP,本文提出的HDF-NP在動力學(xué)約束下,能夠生成狀態(tài)的二階估計,即速度、狀態(tài)估計的維度得以增加。
3 HD-NPF訓(xùn)練
為便于分析HD-NPF性能,本文構(gòu)造了一個二維的飛行目標(biāo)數(shù)據(jù)集作為訓(xùn)練集。令目標(biāo)在二維直角坐標(biāo)系平面進(jìn)行運動,其運動由CV、CA以及CT隨機(jī)組合,形成機(jī)動軌跡。每條軌跡的起始和結(jié)束模型為CV,中間進(jìn)行了兩次隨機(jī)為CA或者CT的機(jī)動。數(shù)據(jù)集其他參數(shù)見表1。
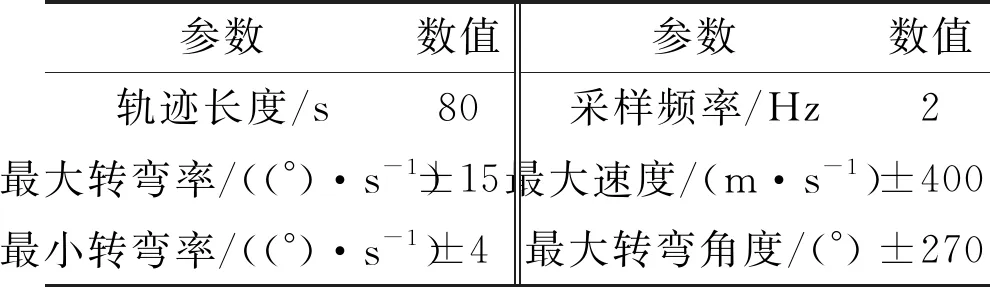
表1 數(shù)據(jù)集參數(shù)
目標(biāo)的初始位置和速度在滿足表1情況下隨機(jī)生成。令rand(a,b)表示a和b之間的均勻分布。CV運動持續(xù)時間為rand(10, 30) s;CA運動持續(xù)時間為rand(10, 20) s(首要滿足加速后不超過最大速度)。
根據(jù)表1隨機(jī)生成100條軌跡,每條軌跡隨機(jī)抽選20條長度為10 s(上下文信息為其中2~7 s的片段)的軌跡段,則訓(xùn)練集的規(guī)模為2 000條。每個訓(xùn)練輪對數(shù)據(jù)集添加標(biāo)準(zhǔn)差為50 m的零均值高斯白噪聲,使得網(wǎng)絡(luò)更好地學(xué)習(xí)目標(biāo)軌跡的統(tǒng)計特征。
(22)

(23)
目標(biāo)量測數(shù)據(jù)隨軌跡起始點變化范圍很大,為便于神經(jīng)網(wǎng)絡(luò)學(xué)習(xí),需要對其進(jìn)行歸一化處理。根據(jù)目標(biāo)軌跡特點和表1,本文將目標(biāo)量測軌跡段歸一化到[-1,1]
(24)
式中:tk=[k-l+1,k-l+2,…,k]為第t個窗口內(nèi)量測對應(yīng)的時間戳向量;fs為傳感器的采樣頻率;vmax為預(yù)設(shè)的目標(biāo)最大速度;lp為需要預(yù)測的時刻點數(shù)目,目標(biāo)跟蹤中通常關(guān)注濾波值和一步預(yù)測,因此lp=1。

4 仿真實驗與分析
4.1 HD-NPF和NP對比
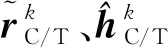
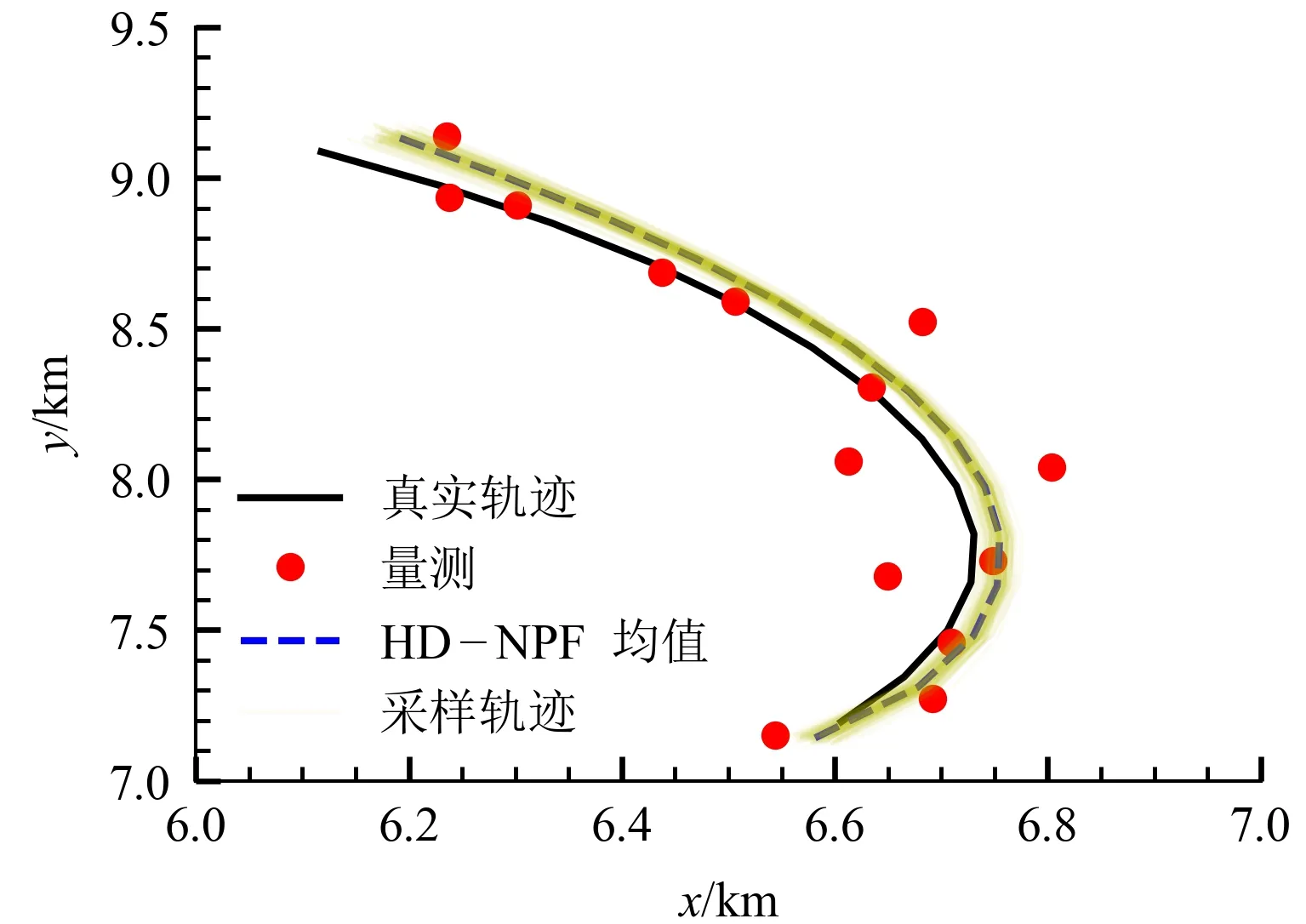
首先進(jìn)行HD-NPF的消融實驗,驗證分析HD-NPF中混合驅(qū)動解碼模塊的效果。NP和HD-NPF采用同樣的訓(xùn)練集軌跡長度進(jìn)行訓(xùn)練。按照第3節(jié)所述隨機(jī)生成一條軌跡段,分別使用HDF-NP和NP生成目標(biāo)軌跡,結(jié)果如圖2所示。
對比圖2中HD-NPF和NP生成的軌跡可以發(fā)現(xiàn),由于HD-NPF的解碼器為混合驅(qū)動的動力學(xué)解碼模塊,使得其生成的軌跡較NP明顯平滑了許多,具有了目標(biāo)運動的特征,而NP學(xué)習(xí)的結(jié)果是朝著量測靠近,導(dǎo)致其估計的軌跡受數(shù)據(jù)影響大。由此可知,混合驅(qū)動的動力學(xué)模塊正確發(fā)揮了預(yù)期作用。
(a)HD-NPF生成軌跡
(b)NP生成軌跡
4.2 機(jī)動目標(biāo)跟蹤實驗

由于本文考慮的是復(fù)雜機(jī)動場景且先驗知識難以獲知下的機(jī)動目標(biāo)跟蹤問題,因此對比算法的參數(shù)設(shè)置較為粗糙。LSF算法采用3階多項式來對目標(biāo)每個維度的量測進(jìn)行擬合。CS模型的機(jī)動頻率設(shè)置為α=1/20,最大加速度幅值為|a±m(xù)ax|=60 m/s2。CS和IMM的量測方差設(shè)置為σm=2 500 m2。IMM采用了3個Kalman濾波器,運動模型和參數(shù)設(shè)置如下:過程噪聲σp=0.012m2的CV,σp=0.012m2、σp=16 m2的CA,轉(zhuǎn)移概率矩陣為
(25)

(26)
然后,進(jìn)行機(jī)動目標(biāo)跟蹤實驗。對于HD-NPF,當(dāng)目標(biāo)剛起始跟蹤即量測數(shù)目小于l時,無法進(jìn)行跟蹤。這個階段選擇經(jīng)典算法進(jìn)行初始跟蹤。
場景1在這個場景中,目標(biāo)狀態(tài)初值x0=[7 000 m,200 m/s,6 000 m,220 m/s]T。開始時直行15 s,然后采取蛇形機(jī)動直到80 s,在81~90 s時直行,16~80 s階段進(jìn)行5次CA模型機(jī)動,其加速度相對于時間的變化情況見表2。

表2 場景1中CA模型參數(shù)序列
進(jìn)行200次蒙特卡羅仿真實驗,得到場景1中各算法跟蹤的位置和速度RMSE對比,如圖3所示。
計算場景1中各算法在整個軌跡上的位置和速度的平均均方根誤差和峰值均方根誤差,結(jié)果如表3所示。需要說明的是,上述計算從軌跡的第12 s開始算起,以減少算法初始化對計算指標(biāo)的影響。此外,將4個算法200次仿真的運行時間也列于表3中。
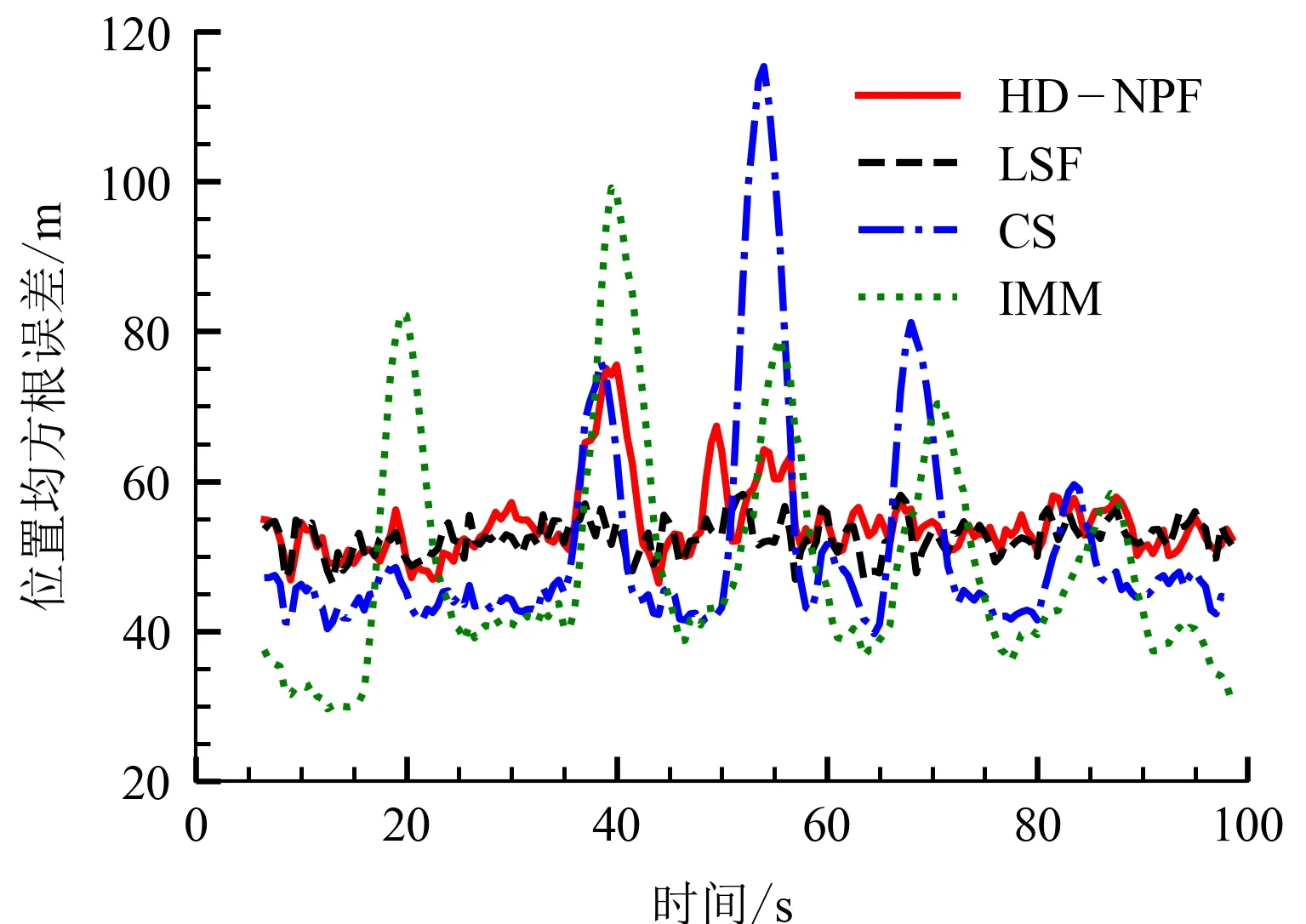
(a)位置RMSE對比

(b)速度RMSE對比
從圖3和表3可以看出:本文提出的HD-NPF算法由于使用了混合驅(qū)動,同時具有了數(shù)據(jù)驅(qū)動和模型驅(qū)動算法的特征。HD-NPF由于利用目標(biāo)歷史信息,位置和速度RMSE的曲線較模型驅(qū)動算法(CS、IMM)波動更小,峰值誤差更低,較CS和IMM降低了約20%,跟蹤更為平穩(wěn)、魯棒性更強(qiáng)。較數(shù)據(jù)驅(qū)動算法(LSF),HD-NPF由于加入了領(lǐng)域知識,使其在圖3(a)中能夠?qū)δ繕?biāo)運動模型的變化發(fā)生產(chǎn)生一定反饋,在圖3(b)中在目標(biāo)穩(wěn)定運動期間,如10~35 s,速度的估計明顯優(yōu)于LSF算法,可解釋性更強(qiáng),符合表3的數(shù)據(jù)。
從200次仿真中隨機(jī)抽選一次實驗,將各算法的軌跡進(jìn)行對比,如圖4(a)所示。為方便觀察,局部放大其機(jī)動部分,如圖4(b)所示。可以看出,由于HD-NPF解碼器為混合驅(qū)動的動力學(xué)模塊,其估計的軌跡平滑性較好。
但是,HD-NPF是無監(jiān)督學(xué)習(xí)算法,學(xué)習(xí)效率較低。同時,場景1的機(jī)動為加速度機(jī)動,較為符合LSF、CS和IMM的先驗知識設(shè)置,因此在位置跟蹤精度上,HDF-NP較其他3種算法較差。
從表3中算法的運行時間來看,雖然HD-NPF使用了神經(jīng)網(wǎng)絡(luò),但是增加的計算成本并不多,較IMM,200次仿真僅增加了0.3 s左右,效率較高。

表3 場景1跟蹤精度對比
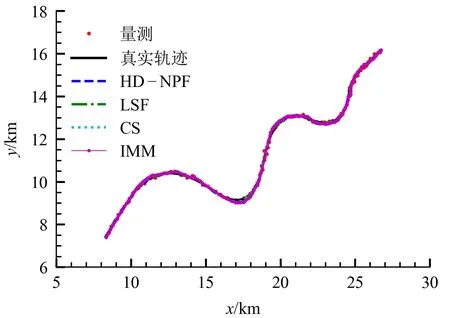
(a)估計軌跡
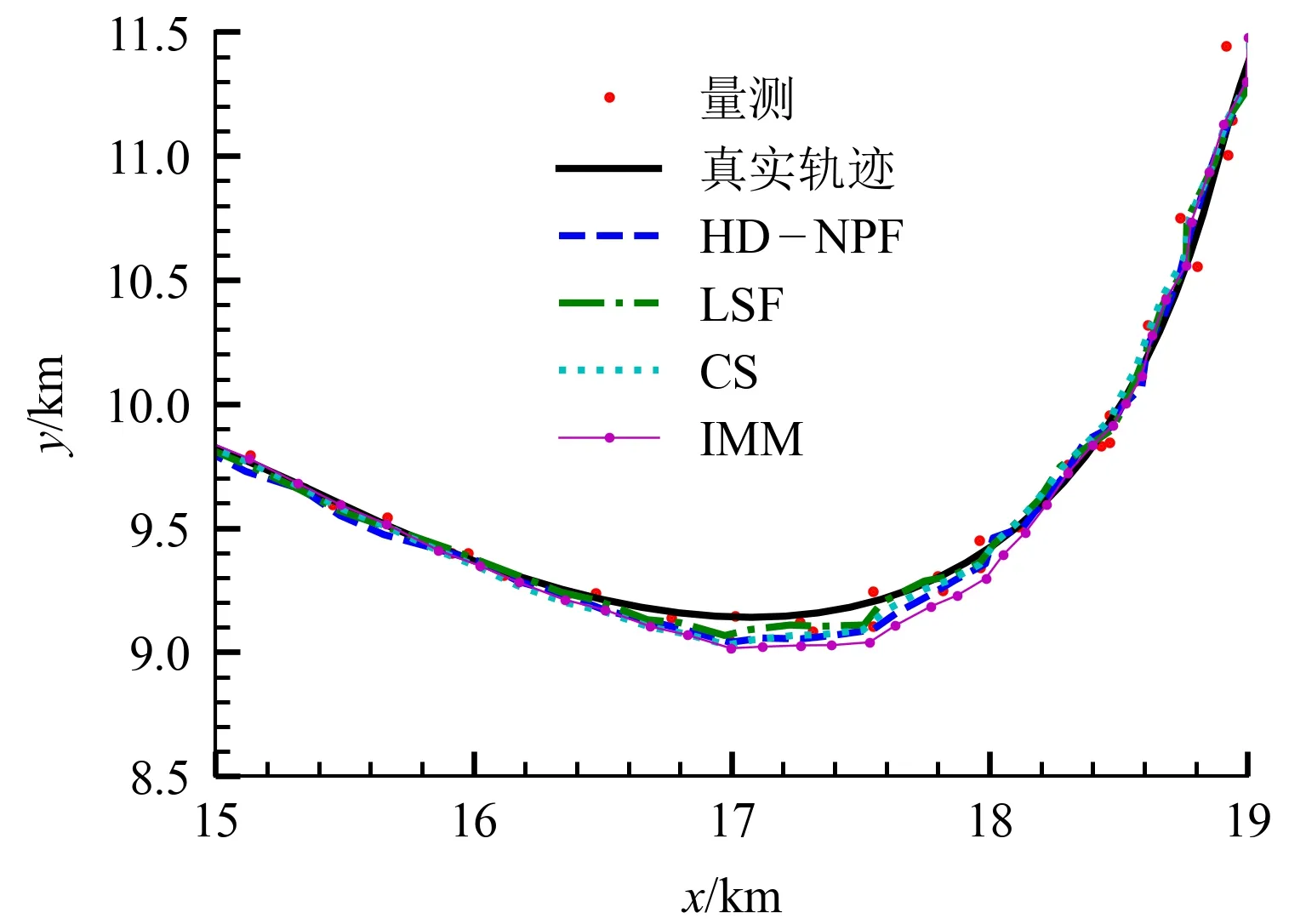
(b)估計軌跡局部放大
場景2場景1的軌跡雖然與訓(xùn)練集不同構(gòu),但是其速度等關(guān)鍵參數(shù)范圍大致在表1范圍內(nèi)。在實際場景中,可能在跟蹤區(qū)域出現(xiàn)異常目標(biāo),其機(jī)動性明顯超出訓(xùn)練集參數(shù)范圍,此時重新訓(xùn)練算法是不現(xiàn)實的。對于本文提出的HD-NPF,面對上述的異常目標(biāo),其策略為通過調(diào)整式(24)的軌跡段歸一化參數(shù)vmax,對異常目標(biāo)的量測數(shù)據(jù)進(jìn)行適當(dāng)縮放,使得處理后的軌跡參數(shù)范圍大致符合訓(xùn)練集,從而盡可能保證跟蹤效果。
因此,場景2設(shè)置了一個異常目標(biāo)的跟蹤場景,其特點在于高速和高機(jī)動性。令目標(biāo)初始狀態(tài)向量為x0=[4 000 m,300 m/s,9 000 m,600 m/s]T,目標(biāo)在1~15 s期間進(jìn)行勻速直線運動,然后以-20 (°)/s的轉(zhuǎn)彎率右轉(zhuǎn)彎15 s,31~40 s期間以[-30,10]Tm/s2的加速度機(jī)動,然后再以15 (°)/s的轉(zhuǎn)彎率持續(xù)10 s的左轉(zhuǎn)彎,之后再以[-40,15]Tm/s2的加速度機(jī)動10 s,最后10 s恢復(fù)勻速直線運動。另外,假設(shè)目標(biāo)所在電磁環(huán)境較差,設(shè)置量測噪聲標(biāo)準(zhǔn)差為100 m。
此時,HD-NPF在初始跟蹤階段判斷其可能為異常目標(biāo)后,對式(24)調(diào)整,本文設(shè)置本場景|vmax|=1 000 m/s。此外,目標(biāo)的高機(jī)動容易導(dǎo)致經(jīng)典算法發(fā)散,將CS的加速度幅值調(diào)整為|a±m(xù)ax|=80 m/s2,IMM算法CA模型的過程噪聲從σp=0.012m2調(diào)整為σp=1 m2。進(jìn)行200次蒙特卡羅仿真實驗,得到仿真結(jié)果如圖5、圖6及表4所示。
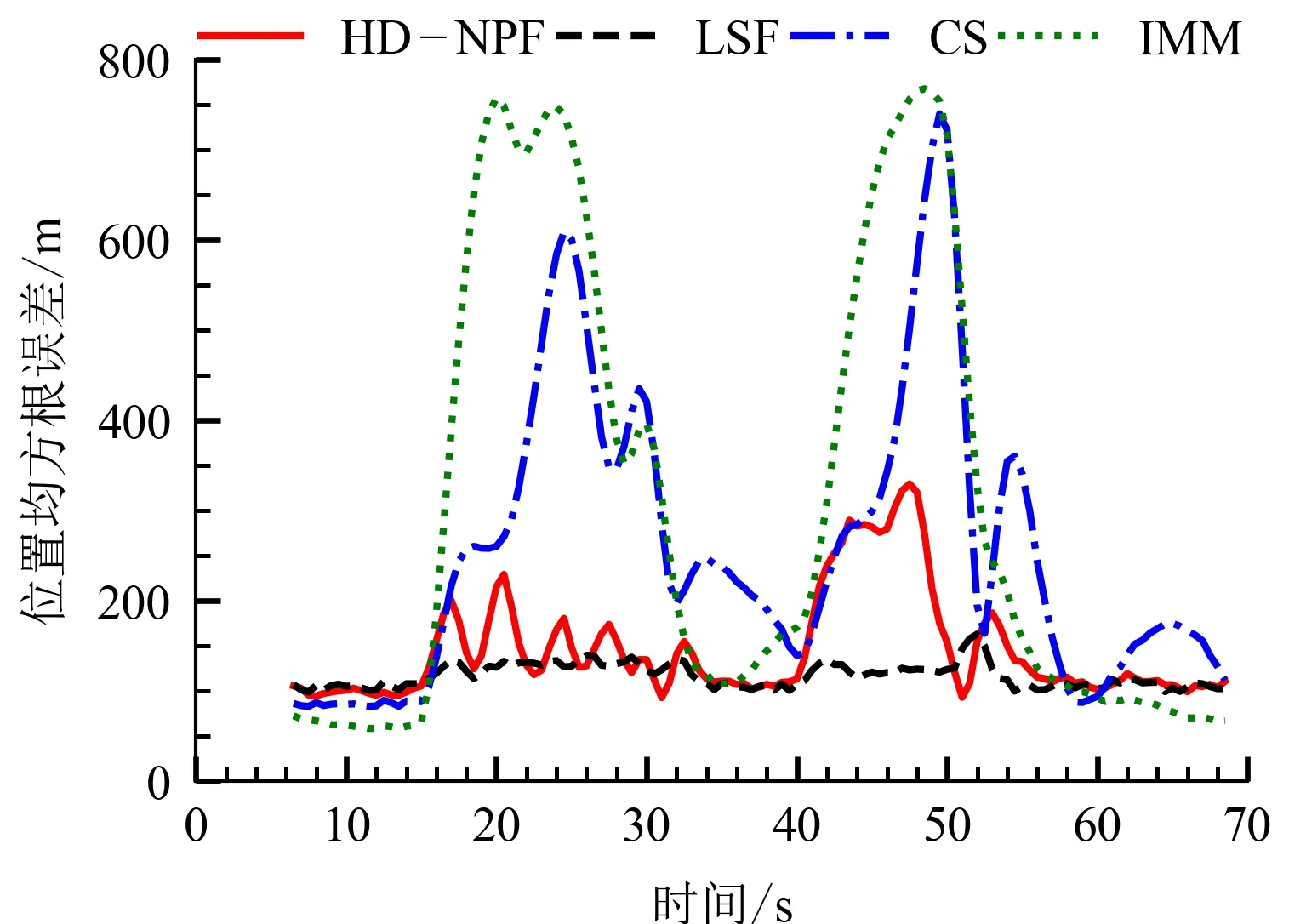
(a)位置RMSE對比
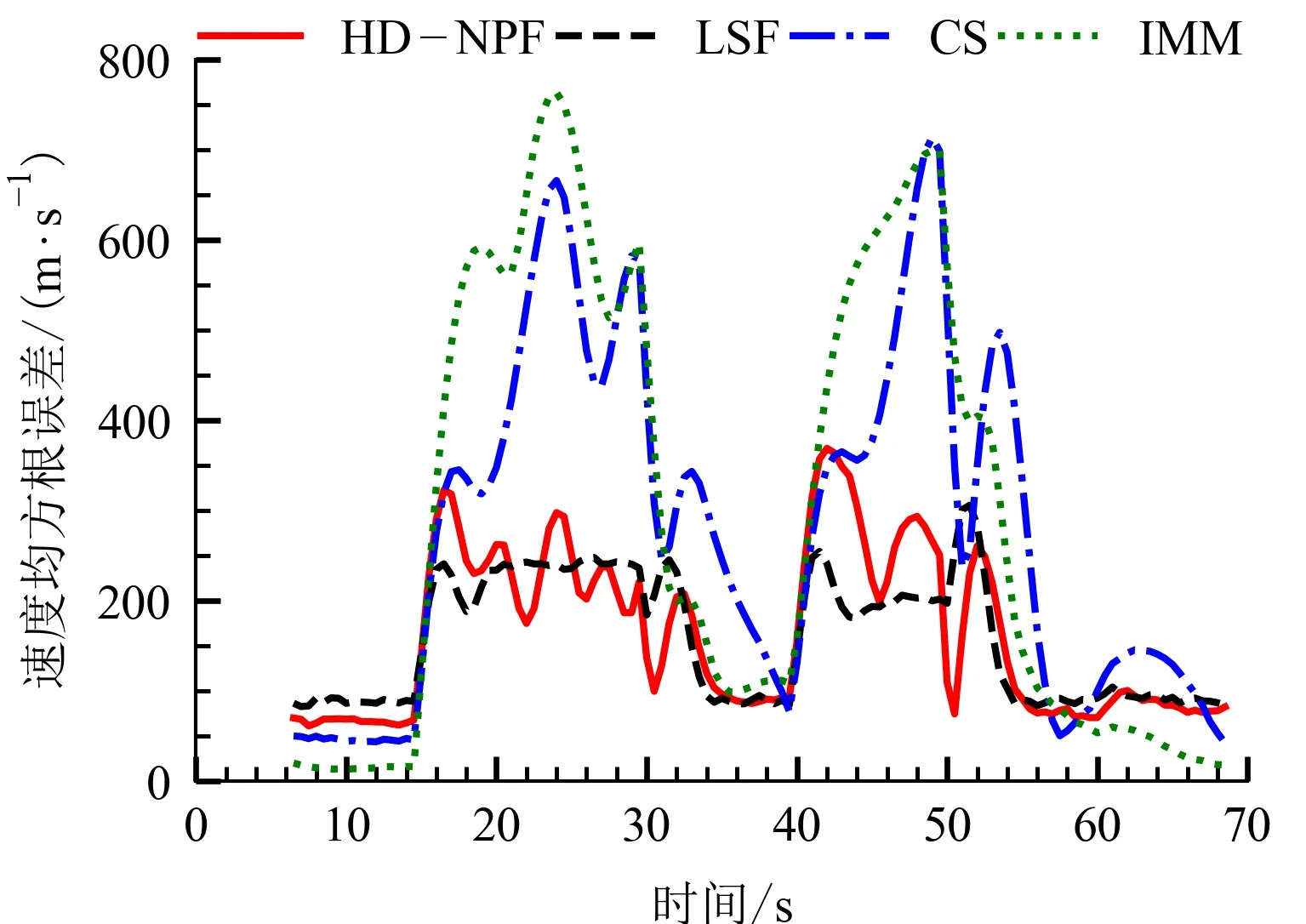
(b)速度RMSE對比
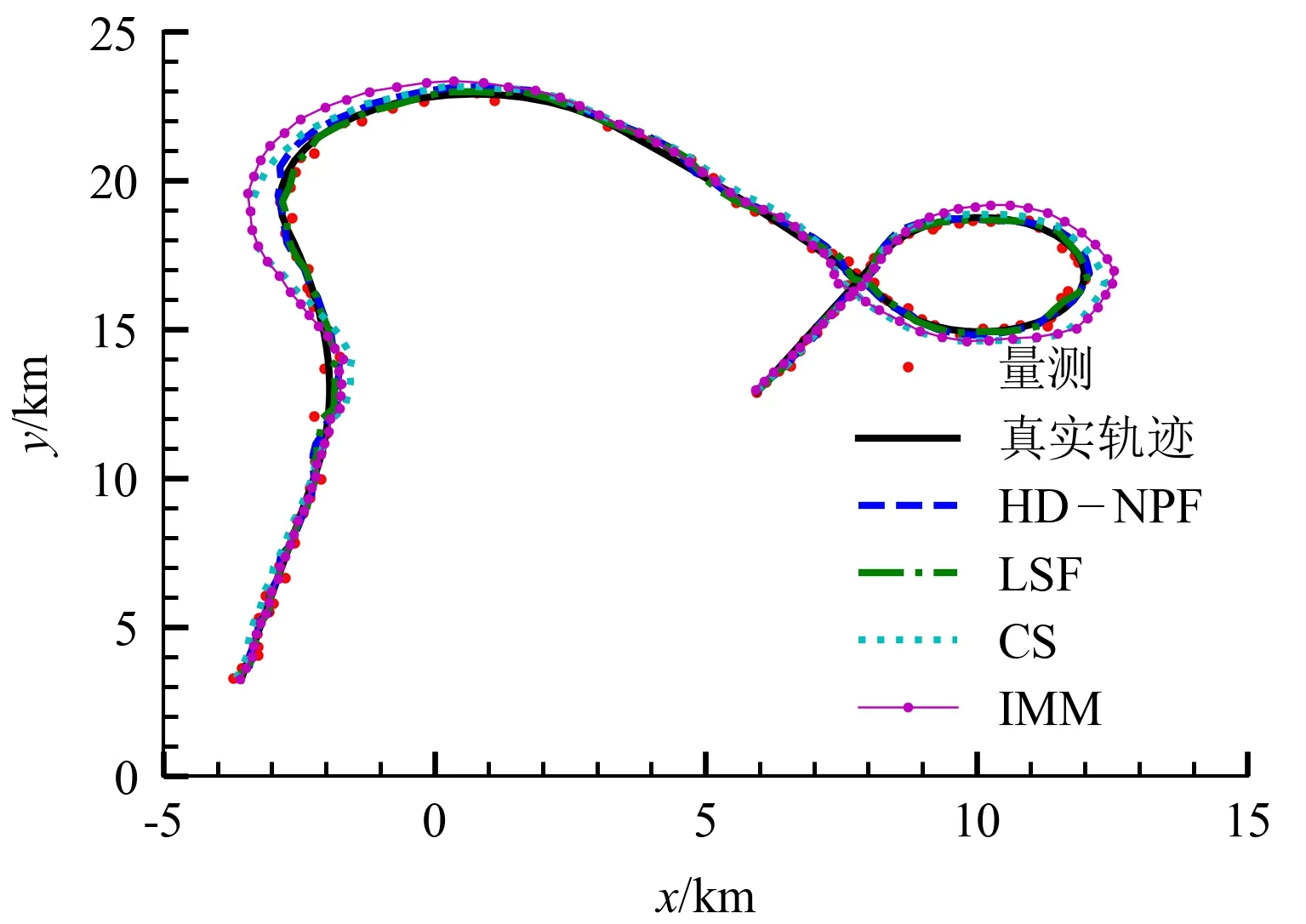
(a)估計的軌跡
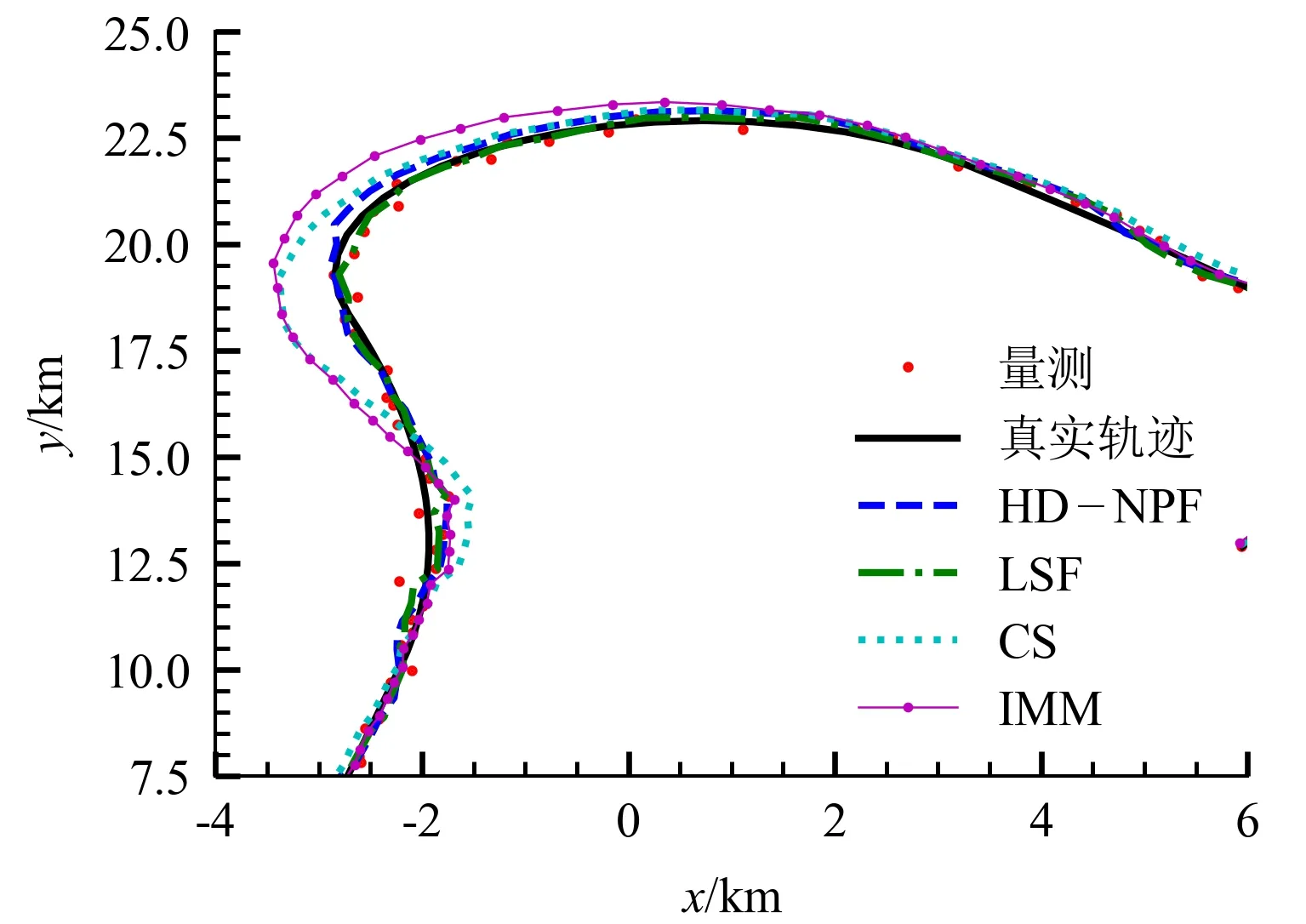
(b)估計軌跡局部放大

表4 場景2跟蹤精度對比
在場景2中,由于是訓(xùn)練集之外的異常目標(biāo),IMM和CS的參數(shù)只是略微修改以盡量避免發(fā)散,并沒有足夠的先驗知識為其設(shè)置較為精確的模型參數(shù)。加上目標(biāo)高機(jī)動、高速度的影響,IMM和CS的跟蹤效果誤差很大(見圖5和表4),估計軌跡在機(jī)動部分已經(jīng)偏離真實軌跡嚴(yán)重(見圖6)。本文提出的HD-NPF可以利用結(jié)構(gòu)上的特點,通過歸一化部分縮放的方式,盡可能適應(yīng)異常情況。圖5和表3表明,HD-NPF仍然能夠保持場景1中的部分優(yōu)勢,較IMM和CS具有更加穩(wěn)定的RMSE和更高的跟蹤精度。在實際應(yīng)用中,對異常目標(biāo)關(guān)注度更高,比如防碰撞等,此時HD-NPF的優(yōu)勢更加明顯。
從圖5和表4可以看出,LSF的跟蹤表現(xiàn)較HD-NPF更好,從圖5可以觀察到兩者跟蹤精度差異主要體現(xiàn)在15~30 s和40~50 s期間的轉(zhuǎn)彎機(jī)動。這是由于目標(biāo)的高速度使得轉(zhuǎn)彎半徑較大,導(dǎo)致HD-NPF易識別成為接近直線的運動,進(jìn)而跟蹤精度降低。因此,實際中應(yīng)該盡可能使得訓(xùn)練集能夠覆蓋目標(biāo)可能的運動模型和情景。
結(jié)合兩個場景的仿真結(jié)果可以看出,雖然模型驅(qū)動方式跟蹤精度較高,但是依賴精確的先驗知識,一旦先驗知識設(shè)置不準(zhǔn)確,其跟蹤精度急速下降。數(shù)據(jù)驅(qū)動的方法依賴先驗知識少,且環(huán)境適應(yīng)能力強(qiáng),在各個場景均保持幾乎一致的跟蹤效果,但可解釋性差,難以辨別目標(biāo)的模型變化。本文提出的HDF-NP結(jié)合了兩者特點,依賴先驗知識少,環(huán)境適應(yīng)能力強(qiáng),且具有一定的可解釋性,即對目標(biāo)模型具有一定識別能力,且采用的是無監(jiān)督學(xué)習(xí)的方式,對數(shù)據(jù)集要求低,更加易于實際應(yīng)用。
在實際場景中,電磁干擾和通信等因素會使得量測可能出現(xiàn)亂序、缺失等現(xiàn)象,LSF雖然在上述實驗中跟蹤表現(xiàn)一般,但是較經(jīng)典跟蹤算法,其在處理這類連續(xù)時間跟蹤時具有優(yōu)勢[26-27]。式(13)~(17)以及圖1的結(jié)果表明,HD-NPF可以接受無序的量測作為輸入,輸出任意連續(xù)時刻的狀態(tài)估計。因此,下一步工作將探索HD-NPF作為連續(xù)時間函數(shù)處理量測亂序、缺失等更加符合實際情況的目標(biāo)跟蹤問題。
5 結(jié) 論
本文基于神經(jīng)過程框架提出了一種無監(jiān)督學(xué)習(xí)的混合驅(qū)動機(jī)動目標(biāo)跟蹤算法。通過將目標(biāo)運動的加速度模型和神經(jīng)網(wǎng)絡(luò)參數(shù)化的目標(biāo)運動微分方程相結(jié)合,構(gòu)造出了混合驅(qū)動的動力學(xué)解碼模塊,替換了NP的解碼部分,使得HD-NPFP生成的軌跡更加平滑和具有動力學(xué)特征。通過仿真實驗可以得到以下結(jié)論。
(1)HD-NPF由于使用了混合驅(qū)動解碼模塊,估計的軌跡較NP在平滑性和動力學(xué)特征上明顯得到增強(qiáng)。HD-NPF同時具有了模型驅(qū)動和數(shù)據(jù)驅(qū)動算法的優(yōu)勢:環(huán)境自適應(yīng)能力強(qiáng),跟蹤穩(wěn)定,需要先驗知識少,且能對目標(biāo)的運動模型具有一定識別能力。
(2) HD-NPF采用的是無監(jiān)督學(xué)習(xí)方法,對數(shù)據(jù)集要求低,在實際情況中更加易于部署。下一步工作將探索HD-NPF在亂序、缺失和不等時間間隔量測等復(fù)雜場景中的目標(biāo)跟蹤問題。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19