
嵌入式控制技術在減搖鰭自適應控制器的應用
2023-05-10 04:37:56孫英培尤冬梅
艦船科學技術 2023年7期
孫英培,尤冬梅
(河南理工大學鶴壁工程技術學院,河南鶴壁 458030)
0 引言
航行中的船舶在海流、海浪等外界因素的擾動下,船體會發生各種搖蕩運動。其中,橫搖運動對船舶的安全性、穩定性造成的影響最大,當橫搖運動的劇烈程度超過船舶自身的平衡位置時,船體就會出現側翻、傾覆等嚴重事故。因此,解決船舶在風浪條件下的穩態特性非常重要。減搖設備作為一種船舶主動提高穩定性的裝置,目前在各類船舶上獲得了廣泛應用,當前使用量最大的減搖設備是減搖鰭,減搖鰭的工作原理基于流體動力學特性,當減搖鰭與流體之間發生相對運動時,流體在減搖鰭表面形成壓力差,給減搖鰭一個反向力和力矩,從而抵抗來自海浪和洋流的干擾力[1]。
減搖鰭盡管應用廣泛,但也存在一定的局限性。當船舶在靜止或者航速較低的情況下,減搖鰭產生的抵抗力矩非常小,減搖效果不明顯。本文針對這一問題進行研究,通過分析減搖鰭的工作原理,采用一種基于嵌入式控制技術的主動式減搖鰭,結合控制理論實現了減搖鰭的主動控制,具有重要的應用價值。
1 船舶橫搖運動數學建模與減搖原理分析
船舶的減搖特性與其流體動力學特性密切相關,因此,首先對船舶的橫搖運動、力學邊界等方面進行研究,建立船舶的力學模型如圖1所示。

圖1 船舶的力學模型Fig.1 Mechanical model of ships
首先建立船舶運動方程:
式中:M為船舶質量;u˙ 和v˙分別為2個方向的加速度;w為船舶角速度; θ為橫搖角度;h為吃水深度;T0為 受到的干擾轉矩;F0為受到的干擾力;J為轉動慣量;?J為附加轉動慣量[2]; κ 為流體阻尼系數;D為船寬。
船舶橫搖運動的周期按下式計算:
建立減搖鰭的力學模型如圖2所示。
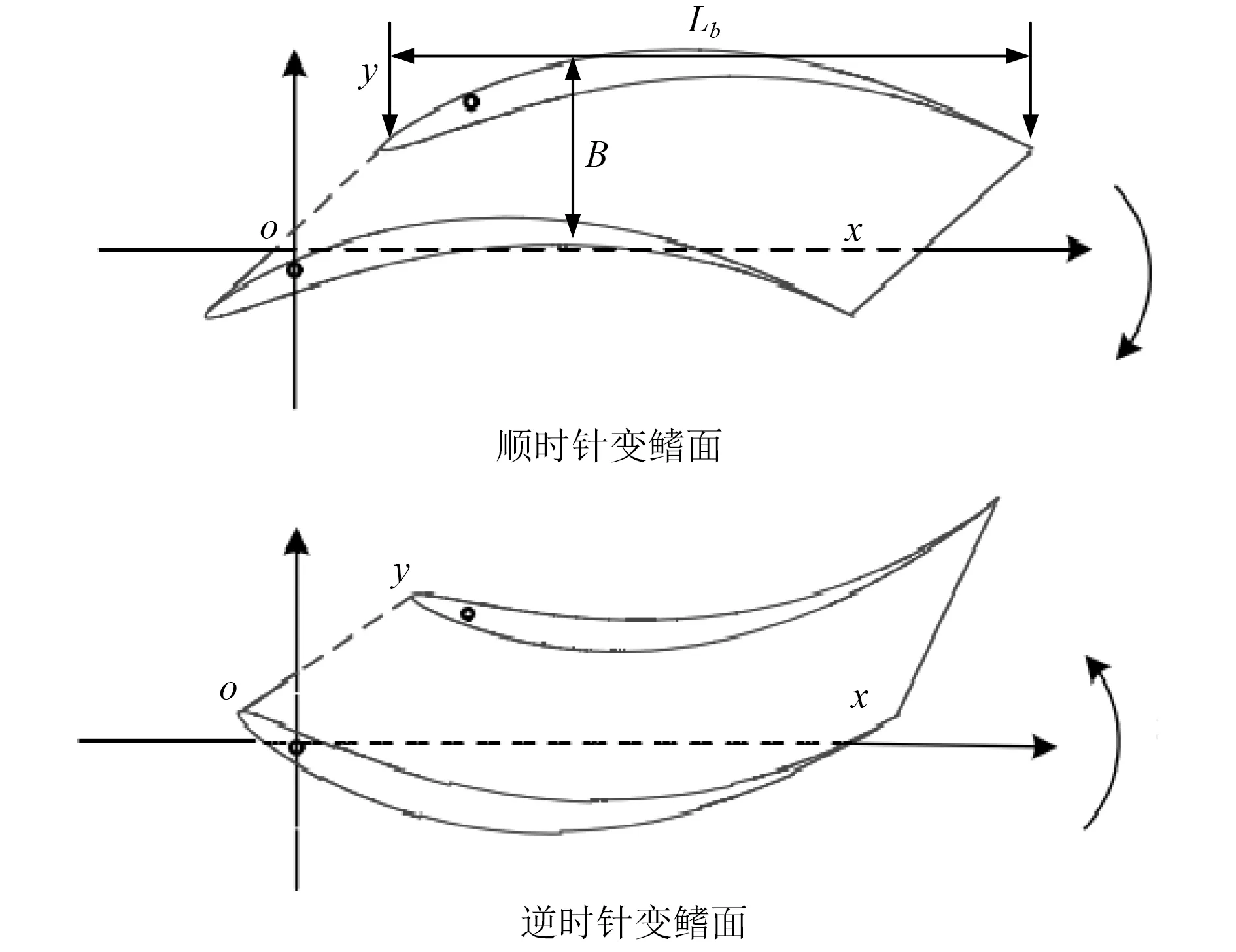
圖2 減搖鰭的力學模型Fig.2 Mechanical model of fin stabilizer
減搖鰭受到的波浪彎矩為:
式中:Lb為減搖鰭弦長;B為寬度;δ為減搖鰭的載重系數, δ ≈0.5;k1,k2為彎矩系數,按照下式計算:
減搖鰭受到的扭矩為:
式中: α為扭轉角度;Ct為扭矩系數,Ct=0.26;h0為重心位置的深度。
減搖鰭在工作過程中必須要產生與干擾力大小一樣,方向相反的效果,定義船舶的速度為V1,海水密度 ρ0,由上述力學模型可知,減搖鰭需要產生的反作用力[3]為:
式中:S為比表面積; δ為減搖鰭的升力系數,升力系數的大小與減搖鰭的形狀和材料有關。
減搖鰭在流體中需要產生的抵抗力矩為:
2 基于嵌入式控制技術的減搖鰭自適應控制器開發
2.1 嵌入式控制系統設計
傳統的減搖鰭是一種被動式的減搖,對船舶速度等因素有較高的要求,針對這一局限性,本文引入一種嵌入式控制的自適應減搖鰭系統,其最大的優勢在于通過嵌入式控制器,實現減搖鰭角度和鰭面的變化,調整減搖鰭產生的減搖力和力矩。
圖3為基于嵌入式控制技術的減搖鰭自適應控制系統原理。

圖3 基于嵌入式控制技術的減搖鰭自適應控制系統原理Fig. 3 Principle of adaptive control system for fin stabilizer based on embedded control technology
減搖鰭自適應控制系統的關鍵組成包括測量元件、控制器、隨動系統和輔助部分等。
1)測量元件
測量元件以傳感器為主,在船舶減搖控制過程中,為了合理控制減搖鰭鰭面與角度,需要采集船舶的航行速度、加速度、橫搖角速度等信號,通常采用角速度陀螺儀等設備[4]。測量元件采集的信號是減搖鰭嵌入式控制系統的輸入信號,信號需要通過積分、噪聲過濾等環節。加速度儀具有體積小、精度高的優點,使用加速度儀可以采集船舶橫搖運動、航向運動的加速度信號。
除了角速度傳感器外,航行速度信號由計程儀設備采集,航行速度信號同樣也是減搖鰭嵌入式控制系統的輸入信號。
2)嵌入式控制器
嵌入式控制器是系統的核心,通過采集測量元件的信號獲取船舶的橫搖運動狀態,結合內部的控制邏輯與傳遞函數,得到船舶減搖鰭的最佳控制策略,然后將控制信號發送至船舶減搖鰭隨動系統,由電液控制器驅動減搖鰭進行鰭面的變換。
3)隨動系統
隨動系統是指減搖鰭自適應控制系統的信號前處理和后處理單元,包括測量信號的功率放大、信號噪聲濾波等,隨動系統必須具有高效、準確的特點,從而保障嵌入式控制器發出的控制指令能夠準確和快速的傳遞至驅動模塊,在船舶橫搖運動失控之前,調整船舶減搖鰭的鰭面[5]。
4)輔助部分
主要是指船舶減搖鰭控制系統的電源模塊、液壓控制回路等,輔助部分也是減搖鰭自適應控制系統不可缺少的部分。
嵌入式減搖鰭控制系統的各環節傳遞函數如下:
1)橫搖運動傳遞函數
式中:?(s)為橫搖角度;α(s)為波浪傾角。
2)測量元件傳遞函數
3)隨動系統傳遞函數;
式中:KQ為隨動系統的增益。
4)嵌入式控制器的傳遞函數
式中:Kp為 嵌入式系統積分系數;KI為嵌入式系統比例系數;KD為嵌入式系統微分系數。
圖4為嵌入式系統測量元件采集的一段時間內船舶橫搖角度曲線。

圖4 船舶橫搖角度曲線Fig.4 Curveof ship roll angle
2.2 主動式減搖鰭的形狀設計及仿真
在減搖鰭嵌入式控制系統中,減搖鰭的表面積形狀設計方程為:
式中:B0為 吃水線上的減搖鰭面寬度[6];L為吃水線上的減搖鰭長度;D0為減搖鰭排水量;T為運動周期;V為與水流的相對速度。
結合軟件程序進行減搖鰭自適應控制系統的性能仿真,采用的減搖鰭參數為B0=2.3 m,D0取105 L,V取50 km/h 和60 km/h。仿真邊界條件如表1所示。

表1 減搖鰭控制系統仿真參數Tab.1 Simulation parameter table of fin stabilizer control system
圖5為仿真得到的V取50 km/h 和60 km/h 兩種流體相對速度下的橫搖角度控制曲線。可知,

圖5 兩種波浪高度下的橫搖角度控制曲線Fig.5 Roll angle control curvesfor two wave heights
3 結語
主動式減搖鰭具有更高的靈活性,在實際應用中減搖效果也更好。本文結合嵌入式控制技術,開發了一種減搖鰭自適應控制系統,從減搖鰭工作原理、自適應控制器原理和仿真等方面進行詳細研究。結果表明,該系統能夠有效提高船舶橫搖運動的穩定性。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
建材發展導向(2019年13期)2019-08-24 06:37:40
電子制作(2019年7期)2019-04-25 13:16:50
鐵道通信信號(2018年2期)2018-04-18 12:18:23
電鍍與環保(2016年3期)2017-01-20 08:15:32
電測與儀表(2014年1期)2014-04-04 12:00:32
單片機與嵌入式系統應用(2014年9期)2014-03-11 15:35:13
自動化博覽(2014年4期)2014-02-28 22:31:15
