基于阿基米德螺旋加密重構(gòu)技術(shù)的無(wú)人航行器KT 辨識(shí)研究
2023-05-10 04:40:22韓璐羽白佳鈺于曹陽(yáng)
艦船科學(xué)技術(shù) 2023年7期
關(guān)鍵詞:模型
韓璐羽,白佳鈺,于曹陽(yáng),連 璉,2
(1.上海交通大學(xué)海洋學(xué)院,上海 200030;2.上海交通大學(xué)海洋工程國(guó)家重點(diǎn)實(shí)驗(yàn)室,上海 200240)
0 引言
近年來(lái),無(wú)人航行器被廣泛應(yīng)用于海洋科學(xué)與工程任務(wù),建立高精度操縱模型是航行器設(shè)計(jì)、優(yōu)化與控制的基礎(chǔ)。目前常用的Abkowitz 整體模型和MMG分離模型中水動(dòng)力參數(shù)較多,相應(yīng)的辨識(shí)系統(tǒng)輸入矩陣維度增加,辨識(shí)計(jì)算量較大[1];而Notomo提出的操縱響應(yīng)方程參數(shù)較少、計(jì)算簡(jiǎn)捷且可直接從約定試驗(yàn)中獲得,這有利于提高運(yùn)動(dòng)控制、性能預(yù)測(cè)等的實(shí)時(shí)性,在無(wú)人航行器研究領(lǐng)域得到廣泛應(yīng)用。
精確辨識(shí)方程中各水動(dòng)力系數(shù)是優(yōu)化建模的關(guān)鍵一環(huán)。傳統(tǒng)系統(tǒng)辨識(shí)方法包括最小二乘法(least square,LS)[2–3]、極大似然法(maximum likelihood,ML)[4]、卡爾曼濾波法(Kalman filter,KF)及其拓展[5–6]等,基于現(xiàn)代人工智能技術(shù)又發(fā)展出了人工神經(jīng)網(wǎng)絡(luò)(artificial neural network,ANN)[7]和支持向量機(jī)(support vector machine,SVM)[8]等方法。孫功武等[3]優(yōu)化最小二乘法,提出了一種基于模糊控制的動(dòng)態(tài)遺忘因子迭代最小二乘(recursive least square,RLS)算法,實(shí)現(xiàn)了遺忘因子針對(duì)誤差的動(dòng)態(tài)調(diào)整,有優(yōu)越的辨識(shí)精度與收斂速度。褚式新等[4]根據(jù)辨識(shí)原理與前向差分法設(shè)計(jì)了一種極大似然辨識(shí)方法,較傳統(tǒng)卡爾曼濾波算法預(yù)報(bào)更為精準(zhǔn)。秦操[6]采用無(wú)跡卡爾曼濾波(unscented Kalman filter,UKF)算法,設(shè)計(jì)分步辨識(shí),有效提高了辨識(shí)精度。以上研究側(cè)重于在現(xiàn)有試驗(yàn)數(shù)據(jù)的基礎(chǔ)上,改進(jìn)算法以提高收斂速度以及辨識(shí)精度。
但在系統(tǒng)辨識(shí)算法已較為成熟的情況下,用于計(jì)算的航向數(shù)據(jù)質(zhì)量對(duì)精度影響可能更為顯著。動(dòng)態(tài)試驗(yàn)中,航向傳感器的數(shù)據(jù)采集頻率與精度相互制約[9–10],不足以支持高精度的模型辨識(shí)。當(dāng)前技術(shù)水平限制下,對(duì)稀疏數(shù)據(jù)進(jìn)行插值重構(gòu)是高效提高辨識(shí)精度的重要途徑。常用的插值方法有拉格朗日插值、分段線性插值、三次樣條插值等,但三者重構(gòu)的光滑程度不完全符合無(wú)人航行器航向隨時(shí)間光滑連續(xù)變化的實(shí)際情境[11 –12]。
阿基米德螺旋(Archimedesspiral, AS)在變量光滑連續(xù)變化方面具有較大優(yōu)勢(shì)。現(xiàn)有研究中,AS結(jié)構(gòu)多用于平面天線的設(shè)計(jì)與實(shí)現(xiàn)[13–14]。此外,在對(duì)非圓二次曲線與樣條曲線輪廓機(jī)械加工時(shí),應(yīng)用AS擬合離散點(diǎn),較一系列折線、圓弧等,實(shí)現(xiàn)了確保精度前提下的計(jì)算量減少[15]。本文嘗試將AS應(yīng)用于初始航向數(shù)據(jù)的插值重構(gòu),探索該方法在操縱辨識(shí)數(shù)據(jù)預(yù)處理方面的更大潛力,對(duì)于優(yōu)化原始稀疏數(shù)據(jù)以得到更為精準(zhǔn)的操縱模型有重要意義。
本文首先引入無(wú)人航行器一階線性響應(yīng)模型,使用采樣頻率不同的數(shù)據(jù)集進(jìn)行參數(shù)辨識(shí),揭示航向預(yù)測(cè)精度與采樣頻率的關(guān)系;之后,使用AS插值重構(gòu)數(shù)據(jù),改善最小二乘算法在初始采樣數(shù)據(jù)稀疏時(shí)的辨識(shí)精度。最后,通過(guò)與初始稀疏數(shù)據(jù)集、基于三次樣條插值的加密集辨識(shí)結(jié)果對(duì)比,證明AS插值方法的優(yōu)越性。
1 無(wú)人航行器操縱運(yùn)動(dòng)數(shù)學(xué)模型
為實(shí)現(xiàn)對(duì)無(wú)人航行器航向的精準(zhǔn)預(yù)測(cè)與控制,需建立其航向角與垂直舵角之間的響應(yīng)方程。假定前向速度恒定,忽略橫搖、縱傾和浮潛自由度耦合的影響,無(wú)人航行器的水平面動(dòng)力學(xué)方程可簡(jiǎn)化為[16]:
式中:m為 無(wú)人航行器的質(zhì)量;mii(i=1,2,6)表示其附加質(zhì)量;Y?和N?為 線性/非線性水動(dòng)力系數(shù);Y和N為無(wú)人航行器驅(qū)動(dòng)執(zhí)行器產(chǎn)生的側(cè)向推力及偏航力矩;Iz表示繞z軸的慣性矩。
假設(shè)僅小舵角操縱無(wú)人航行器,則式(1)可進(jìn)一步簡(jiǎn)化為:
式(2)經(jīng)變換,得到:
式中: δ為舵角,rad;T1,T2,T3為時(shí)間常數(shù),s,表征無(wú)人航行器的應(yīng)舵性和航向穩(wěn)定性;K為舵角增益,s?1,也稱旋回性指數(shù)。上述K和T參數(shù)具體表達(dá)為:
式(3)即為日本Notomo教授提出的一般性首搖響應(yīng)線性方程,通常稱作二階線性KT方程。本文側(cè)重于探究響應(yīng)方程參數(shù)辨識(shí)過(guò)程中由于輸入數(shù)據(jù)“航向-舵角”稀疏產(chǎn)生的問(wèn)題及相應(yīng)優(yōu)化方法。為此,在操舵不很頻繁的前提下,參數(shù)辨識(shí)與設(shè)計(jì)優(yōu)化階段選取進(jìn)一步簡(jiǎn)化的一階線性KT模型:
也可用航向角 φ(rad)表示為:
式中:
2 響應(yīng)模型參數(shù)辨識(shí)及辨識(shí)精度判定原理
2.1 基于最小二乘算法的響應(yīng)模型參數(shù)辨識(shí)
對(duì)一階線性KT 模型進(jìn)行參數(shù)辨識(shí)時(shí),首先將式(9)作離散化處理,即用向前差分代替原本微分形式。整理得:
式中: ?t表示航向/舵角傳感器兩次采樣的間隔時(shí)長(zhǎng),s;φ(t) 和δ (t) 分別為t時(shí)刻無(wú)人航行器航向角和舵角。
將式(11)表達(dá)為矩陣形式,即可得到最小二乘法的標(biāo)準(zhǔn)辨識(shí)模型AX=b。矩陣具體表達(dá)為:
輸出矩陣
輸入矩陣
參數(shù)矩陣
此參數(shù)矩陣X的最小二乘解為:
因此,將操縱試驗(yàn)中航向/舵角傳感器采集的數(shù)據(jù)依次代入輸入矩陣和輸出矩陣,即可解得式(9)中一階線性響應(yīng)模型的K和T參數(shù)。
2.2 參數(shù)辨識(shí)精度的判定
為確定K和T的辨識(shí)精度,將式(11)整理得到如下遞推關(guān)系式:
代入初始采樣數(shù)據(jù)集 ?t,t和δ(t)等數(shù)據(jù)以及辨識(shí)所得參數(shù)K和T,預(yù)測(cè)無(wú)人航行器航向角φ′(t)。通過(guò)與操縱試驗(yàn) φ(t)對(duì)比,計(jì)算各時(shí)刻絕對(duì)誤差和總均方根誤差作為參數(shù)辨識(shí)精度的定量判定標(biāo)準(zhǔn)。
3 數(shù)據(jù)采樣頻率對(duì)辨識(shí)精度影響的定量分析
3.1 參數(shù)辨識(shí)輸入矩陣數(shù)據(jù)采集
Z 形操縱試驗(yàn)于1943年由Kempt 提出,用于衡量船舶操縱性能,目前被廣泛應(yīng)用于無(wú)人航行器性能分析,是確定參數(shù)K和T的標(biāo)準(zhǔn)方法。本文利用文獻(xiàn)[17]中模型數(shù)據(jù),以Matlab為平臺(tái),開(kāi)展15°Z 形全數(shù)字仿真試驗(yàn)。仿真采樣時(shí)間間隔為0.1 s,采樣總時(shí)長(zhǎng)為20 s,所得數(shù)據(jù)如圖1所示。
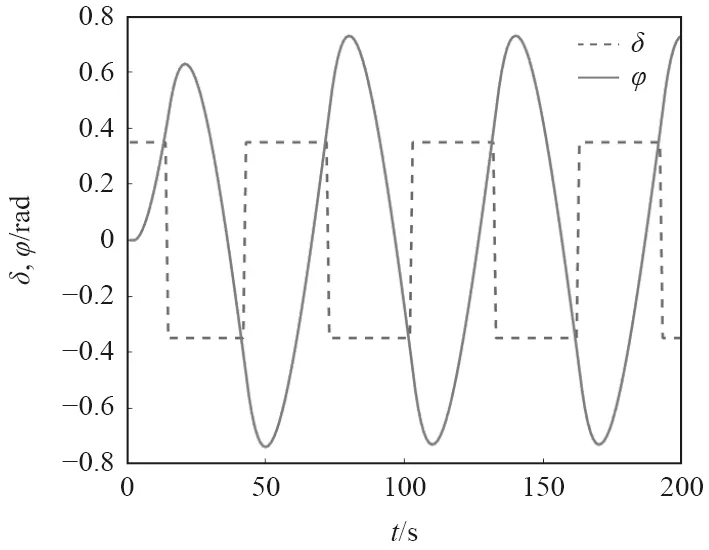
圖1 15° Z形仿真試驗(yàn)數(shù)據(jù)Fig.1 Data in 15° zigzag simulation
3.2 輸入矩陣采樣頻率對(duì)辨識(shí)精度的影響分析
基于圖1中的仿真數(shù)據(jù),建立初始采樣數(shù)據(jù)集S0。從S0中取時(shí)間間隔放大為0.5 s和0.2 s 的數(shù)據(jù),即分別取t=0.5 s,t=1 s,…,t= 20 s 和t= 0.2 s,t=0.4 s,…,t=20 s 時(shí)舵角 δ(t)和航向角φ(t),構(gòu)成稀疏數(shù)據(jù)集S1和S1′。S0、S1和S1′數(shù)據(jù)如圖2所示。
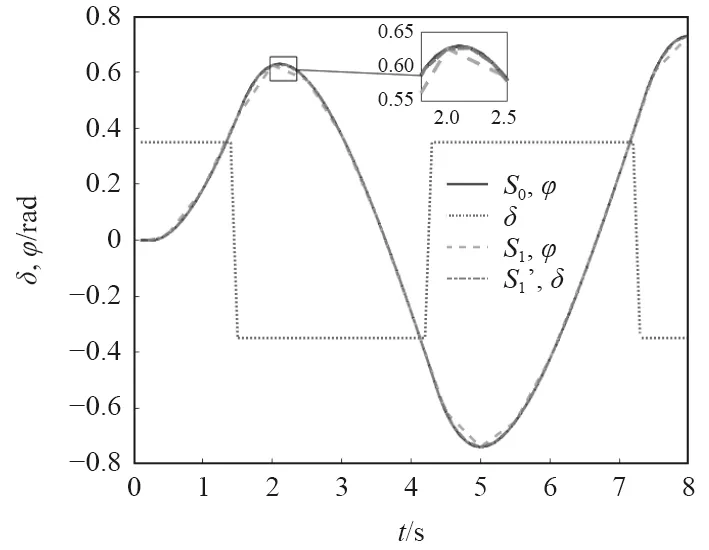
圖2 不同采樣頻率數(shù)據(jù)集S0、S1和S1′對(duì)比圖Fig.2 Comparison of data sets(S0,S1 and S1′)with different acquisition frequencies
對(duì)各數(shù)據(jù)集開(kāi)展KT參數(shù)辨識(shí),辨識(shí)結(jié)果如表1 所示。
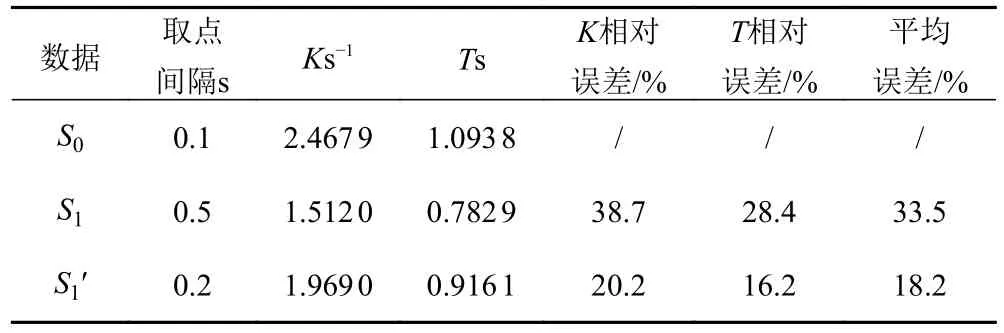
表1 S0,S1和S1′辨識(shí)結(jié)果對(duì)比Tab.1 Comparison of identification results using S0,S1 and S1′
利用上述3個(gè)數(shù)據(jù)集辨識(shí)得到的KT數(shù)據(jù),輔以式(16)得到無(wú)人航行器的航向預(yù)測(cè)對(duì)比結(jié)果,如圖3所示。

圖3 S0、S1和S1′所得KT 模型對(duì)應(yīng)的航向預(yù)測(cè)結(jié)果對(duì)比Fig.3 Comparison of heading results derived from three data sets(S0, S1 and S1′)
不同密度數(shù)據(jù)辨識(shí)的航向結(jié)果均與實(shí)測(cè)數(shù)據(jù)存在一定誤差。S0模型預(yù)測(cè)的絕對(duì)誤差在0.02 rad 以內(nèi),精度較高,能夠滿足無(wú)人航行器響應(yīng)建模與路徑預(yù)測(cè)的實(shí)際需求。然而,隨著數(shù)據(jù)采集頻率降低,數(shù)據(jù)集稀疏程度加深,相應(yīng)的辨識(shí)誤差增大,說(shuō)明有必要保持一定的數(shù)據(jù)采集密度。在航向/舵角傳感器數(shù)據(jù)采集頻率固定的情況下,應(yīng)用合適的數(shù)據(jù)插值加密方法對(duì)參數(shù)辨識(shí)輸入矩陣預(yù)先進(jìn)行優(yōu)化處理,有利于得到高精度無(wú)人航行器KT響應(yīng)模型。
4 基于阿基米德螺旋(AS)重構(gòu)加密的改進(jìn)辨識(shí)
4.1 稀疏數(shù)據(jù)集AS插值重構(gòu)
阿基米德螺旋(AS)的極坐標(biāo)表達(dá)形式如下:
式中:r和 θ分 別為極徑和極角,θ ∈[0,θmax];k為正常數(shù)。
選取采樣間隔為0.5 s的數(shù)據(jù)集S1進(jìn)行重構(gòu),以t和 φ為基本變量。設(shè)第i個(gè)數(shù)據(jù)點(diǎn)為Ai(ti,φi)(i=1,2,3,…),Ai與Ai+1之 間采用AS幾何連接,記作ASi,參數(shù)化表達(dá)為:
式中: ρ為依據(jù)Ai與Ai+1相對(duì)位置關(guān)系確定的AS螺旋方向, ρ=1表示螺旋路徑從極坐標(biāo)的原點(diǎn)(Ai)按順時(shí)針?lè)较騻鞑ィ?ρ=?1即按逆時(shí)針?lè)较騻鞑ィ?σ表示螺旋初始角度。由于需給定螺旋初始方向,插值至少?gòu)牟杉牡?個(gè)數(shù)據(jù)點(diǎn)(A2)開(kāi)始,由A2與前點(diǎn)A1確定 σ。ρ和σ 的表達(dá)式如下:
為盡可能縮小時(shí)間維度響應(yīng)不足對(duì) σ值的影響,設(shè)Ai與Ai?1離散化插值所得點(diǎn)中最接近Ai?1者 為B(i?1)ilast(i>2),將σ計(jì)算調(diào)整為:
每段AS重構(gòu)終止于點(diǎn)Ai+1(ti+1,φi+1),以此為邊界條件,給定常數(shù)k和θmax。完成重構(gòu)的數(shù)據(jù)集記作S2。
A1,…,A4數(shù)據(jù)點(diǎn)為例,重構(gòu)方法示意如圖4所示。

圖4 AS插值重構(gòu)方法示意圖Fig.4 The schematic diagram of ASinterpolation method
4.2 重構(gòu)數(shù)據(jù)集辨識(shí)效果對(duì)比
為了進(jìn)一步體現(xiàn)AS重構(gòu)加密的優(yōu)越性,除將其模型參數(shù)辨識(shí)精度與原稀疏數(shù)據(jù)集S1對(duì)比外,還選取S1基于三次樣條插值的加密集S3作為對(duì)照。S0,S1,S2和S3參數(shù)辨識(shí)結(jié)果如表2所示,航向預(yù)測(cè)精度對(duì)比分別如圖5和圖6所示。
由表2,圖5和圖6可以看出,重構(gòu)加密后的數(shù)據(jù)集S2和S3較原稀疏數(shù)據(jù)模型辨識(shí)效果有明顯改善,KT參數(shù)辨識(shí)精度顯著提高,其中K的相對(duì)誤差縮小至不到1%;基于KT模型的航向角預(yù)測(cè)結(jié)果絕對(duì)誤差縮小了一個(gè)數(shù)量級(jí)。此外,AS彌補(bǔ)了三次樣條插值光滑性不足的缺陷,更加符合Z 形操縱試驗(yàn)中航向角光滑連續(xù)變化的實(shí)際情景。圖6表明,AS較三次樣條重構(gòu)加密精度提高了20%,展現(xiàn)了AS的卓越性。圖5和圖6表明,S2,數(shù)據(jù)集辨識(shí)已較為接近S0所得結(jié)果,很大程度上減小了傳感器采樣頻率較低時(shí)對(duì)無(wú)人航行器響應(yīng)模型辨識(shí)的影響。
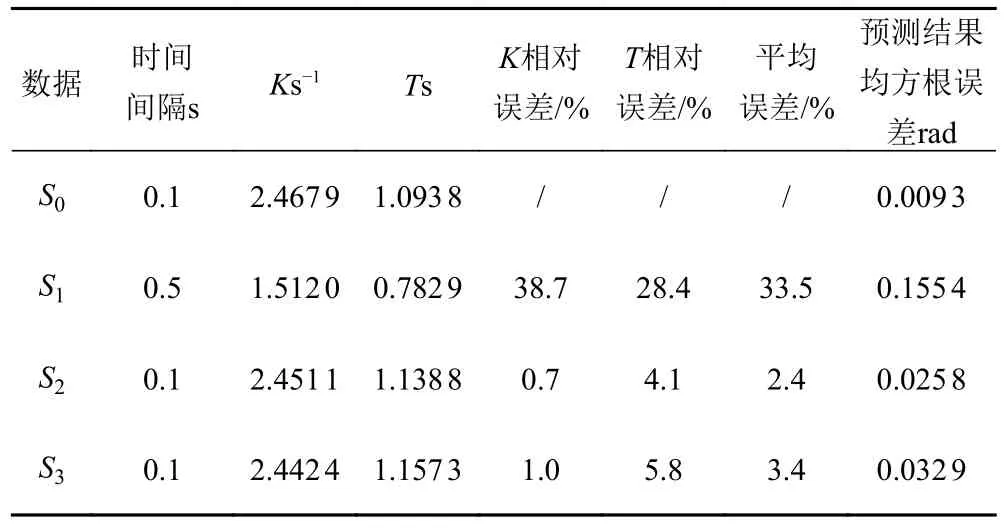
表2 S0,S1,S2和S3辨識(shí)結(jié)果對(duì)比Tab.2 Comparison of identified results of S0,S1,S2 and S3

圖5 S0,S1和S2 所得KT 模型預(yù)測(cè)結(jié)果對(duì)比Fig.5 Comparison of heading results derived from three data sets(S0,S1 and S2)
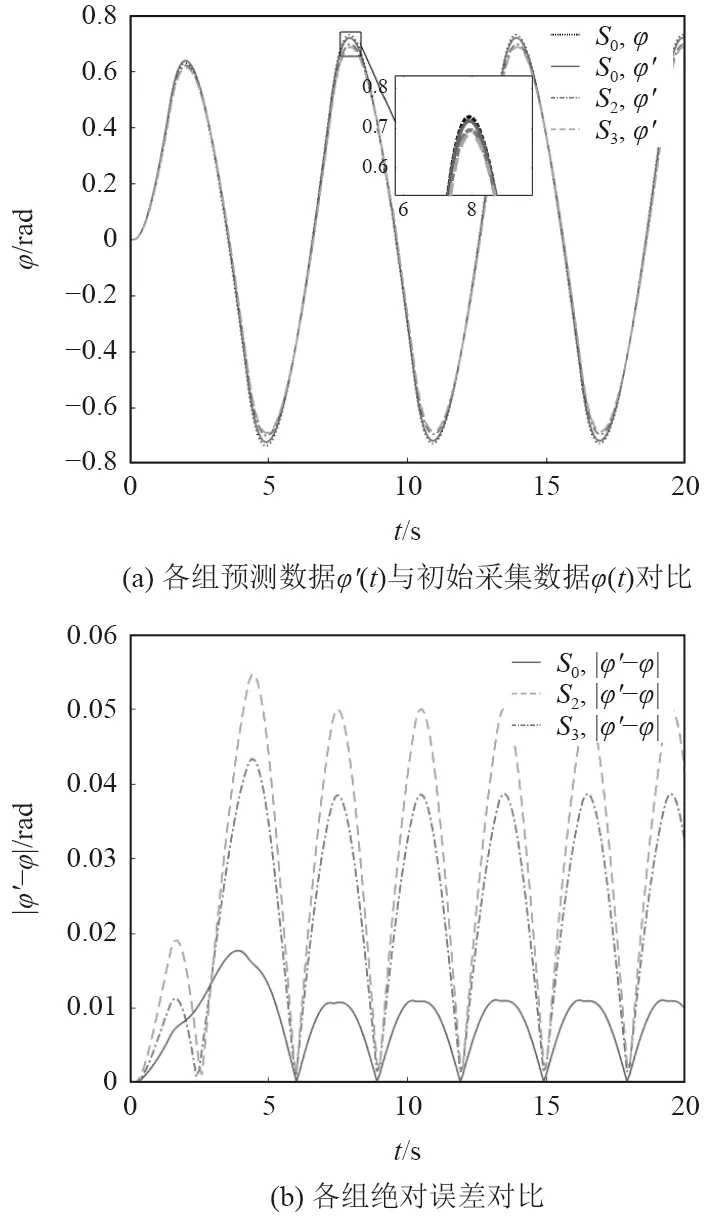
圖6 S0,S2 和S3所得KT 模型預(yù)測(cè)結(jié)果對(duì)比Fig. 6 Comparison of heading resultsderived from three data sets(S0,S2 and S3)
5 結(jié)語(yǔ)
本文將阿基米德螺旋加密重構(gòu)算法應(yīng)用于Z 形操縱試驗(yàn)數(shù)據(jù)的插值優(yōu)化中,并基于重構(gòu)數(shù)據(jù)集進(jìn)行一階線性操縱響應(yīng)方程的參數(shù)辨識(shí)。該方法優(yōu)化了系統(tǒng)辨識(shí)算法在稀疏數(shù)據(jù)集上的表現(xiàn),并且有效彌補(bǔ)了三次樣條插值光滑程度有限的不足。本文從AS插值優(yōu)化算法的引入必要性、數(shù)據(jù)預(yù)處理與辨識(shí)過(guò)程、辨識(shí)結(jié)果分析與對(duì)比等三方面展開(kāi)研究,得到以下結(jié)論:
1)航向數(shù)據(jù)采集間隔由0.1 s 下降至0.5 s時(shí),KT參數(shù)辨識(shí)平均誤差增大了33.5%,說(shuō)明數(shù)據(jù)采集頻率對(duì)參數(shù)辨識(shí)精度有很大影響。
2)在數(shù)據(jù)采集頻率受限的情況下,AS加密預(yù)處理的數(shù)據(jù)集與高精度高頻率采樣數(shù)據(jù)集的參數(shù)辨識(shí)平均誤差僅相差2.4%。同時(shí)依據(jù)辨識(shí)所得模型預(yù)測(cè)航向,與實(shí)際仿真試驗(yàn)結(jié)果對(duì)比,均方根誤差僅為0.0258 rad。表明AS插值優(yōu)化算法提高稀疏數(shù)據(jù)集辨識(shí)精度的有效性。
3)與基于三次樣條插值算法加密數(shù)據(jù)的效果對(duì)比表明,KT辨識(shí)與預(yù)測(cè)結(jié)果誤差均有所下降,驗(yàn)證了AS在變量光滑連續(xù)變化方面具有較大優(yōu)勢(shì),更適合航向數(shù)據(jù)優(yōu)化的實(shí)際情境。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
