
改進神經網絡的船舶紅外圖像邊緣檢測方法
2023-05-10 04:45:22劉志東
艦船科學技術 2023年7期
劉志東
(1.四川大學,四川成都 610065;2.四川城市職業學院,四川成都 610110)
0 引言
紅外圖像采集系統具有采集圖像速度快、不受天氣影響等優點,被應用在船舶檢測領域。通過紅外圖像采集系統可準確采集海上船舶紅外圖像,便于實施海上船舶管理。局部極值點匯聚一起形成圖像邊緣[1],因船舶紅外圖像邊緣中存在關鍵的特征數據,因此對船舶紅外圖像邊緣檢測至關重要[2]。圖像處理中通過邊緣檢測方法提取圖像邊緣中背景和目標灰度差異部分,有利于目標識別[3–4]。目前,相關學者已經開始對船舶紅外圖像邊緣檢測方法展開研究。王睿男[5]研究形態學的邊緣檢測方法,采用多方面元素提取船舶紅外圖像邊緣特征,經多特征的加權融合計算后,完成船舶紅外圖像邊緣檢測。因該方法加權求解過程過于復雜,導致船舶紅外圖像邊緣檢測速度比較慢。何謙等[6]研究DexiNed 改進的邊緣檢測方法,通過優化損失函數改進DexiNed 方法,調整網絡模型,對該模型實施訓練后輸出船舶紅外圖像邊緣數據,實現船舶紅外圖像邊緣檢測。雖然該方法在少量的樣本船舶紅外圖像邊緣檢測方面取得一定應用效果,但對于海量樣本的船舶紅外圖像邊緣檢測中應用效果不太理想,邊緣特征提取過慢,強紅外圖像邊緣檢測效率低,適應性低。
改進神經網絡具有收斂性快、尋優能力強、學習能力強等優點,被廣泛應用在圖像識別領域,并取得較好應用效果。針對以上方法在船舶紅外圖像邊緣檢測中存在的局限性,研究改進神經網絡的船舶紅外圖像邊緣檢測方法,提高船舶紅外圖像邊緣檢測能力。
1 船舶紅外圖像邊緣檢測方法
1.1 船舶紅外圖像去噪處理
因船舶紅外圖像在采集過程中容易受到外界因素的影響,導致采集的船舶紅外圖像中存在大量噪聲數據,因此采用基于塊匹配的主成分分析(principal component analysis,PCA)圖像去噪方法對船舶紅外圖像實施去噪處理,為船舶紅外圖像邊緣檢測奠定基礎。將船舶紅外圖像中需要去噪的像素點分為1 個變量塊作為訓練樣本,設置船舶紅外圖像中用Y表示矩陣,行列數量分別用a,b描述,P C A 變換求解流程為:
步驟1求解船舶紅外圖像Y矩陣的各行均值,其求解公式如下:
其中:像素點分別用i,j描述。
中心矩陣計算公式如下:
步驟2求解船舶紅外圖像Y矩陣的協方差矩陣,其求解公式為:
DY特征值對角矩陣表達式如下:
式中,特征值用 ν描述。
特征向量矩陣表達式為:特征向量用 ?描述,依據大小順序對 ν , ?進行排序。
步驟3投影矩陣的生成,投影矩陣表達式為:
PCA 反變換方法:設置變換矩陣用P=?T描述,此時原始矩陣經過降維后得出投影矩陣。PCA 含噪聲矩陣Y a通過最小均方誤差估計算法對其實施降噪,區分船舶紅外圖像中圖像數據與噪聲數據。用表示Y a第l行,該算法表達式如下:
式中:均值權重系數分別用E[·], ωl描述;無噪聲估計值用描述。
σ表示噪聲標準差,方差用var()描述,權重系數求解公式:
其中:含噪聲像素值用s描述;無噪聲像素值用o描述。
通過式(7)可去除船舶紅外圖像矩陣各行的噪聲后,采用PCA 反變換后,可獲取去噪后船舶紅外圖像。
1.2 改進神經網絡的圖像邊緣檢測
1.2.1 改進BP神經網絡
BP神經網絡算法流程如圖1所示。BP神經網絡算法流程為:將神經元實施初始化,計算隱含層、輸出層每個節點的輸出后,給定輸入向量與目標輸出,并計算目標值和實際輸出的偏差,求解反向誤差進行取值學習,對學習結果實施判斷,滿足終止條件,停止迭代,反之需要重新計算隱含層、輸出層每個節點的輸出。
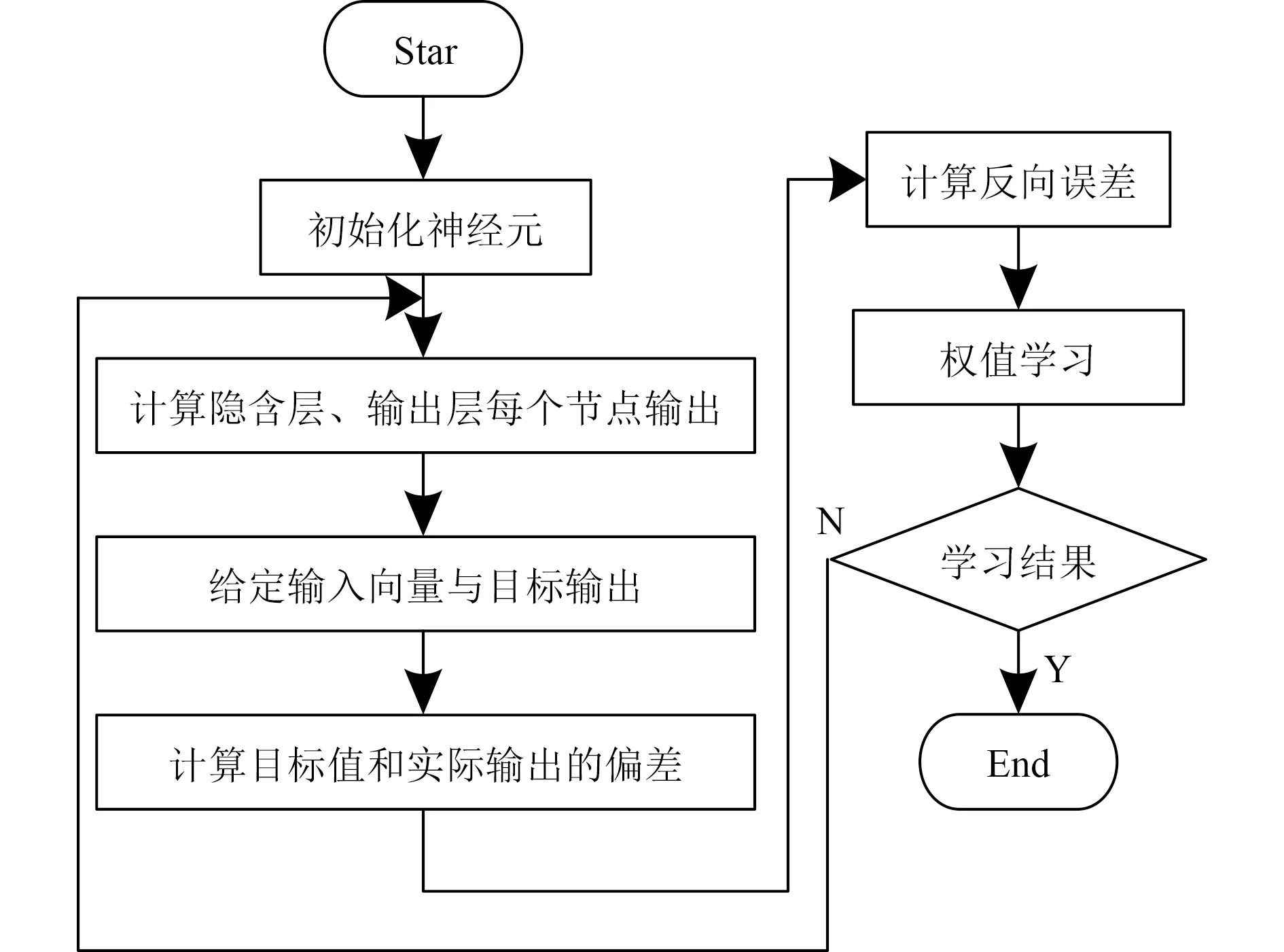
圖1 BP神經網絡算法流程Fig.1 BP neural network algorithm flow
通過附加動量法-自適應學習速率對BP 神經網絡實施改進,調整BP 神經網絡權值,提高網絡訓練魯棒性。附加動量法權值調整算法主要是通過改變學習速率,增強網絡性能,用 ?M表示網絡權值增量,附加動力因子權值調整表達式如下:
式中:動量因子用nc描述;網絡權值用M描述;訓練次數用k描述;誤差函數用F描述;學習速率用 γ描述。
在網絡訓練時,需要對附加動力因子設置判斷條件,才能正確使用權值調整公式,其判斷條件公式如下:
式中,第k代誤差平方和用F(k)描述。
學習速率過大過小均會影響神經網絡學習訓練效率,因此需要自適應調節學習速率,學習速率自適應調整表達式如下:
1.2.2 圖像邊緣檢測
改進神經網絡的船舶紅外圖像邊緣檢測基本流程為:將降噪處理后船舶紅外圖像轉換為二值圖像后作為改進BP神經網絡的輸入,經過網絡學習訓練,完成船舶紅外圖像檢測。輸入層確定流程如下:
步驟1輸入預處理后船舶紅外圖像α, 用α(i,j,g),g=1,2,3表 示圖像像素點 (i,j)的彩色分量;
步驟2通過彩色梯度算子求解出船舶紅外圖像中(i1,j1) ,(i2,j2)像素點的歐式距離,2個像素點歐式距離表達式為:
經梯度算子處理后將船舶紅外圖像α 轉換為灰度圖像。
步驟3采用梯度算子將灰度圖像 α1轉換成二值圖像 α2。
步驟4輸入樣本為轉換后二值圖像,再實施下一步網絡訓練。
隱含層確定:依據相關資料可知,隱含層數量求解公式如下:
其中:整數用 ε 描述 ε =[0?10];輸出和輸入神經元數量分別用 β , χ描述。此處構建由3層隱含層組成的神經網絡。
輸出層確定:神經網絡輸入層、輸出層中分別包括9個神經元、1個神經元。當輸出值比設置閾值0.1低時,表示檢測點不是船舶紅外圖像邊緣點;當輸出值比設置閾值0.9高時,表示檢測點為船舶紅外圖像邊緣點。
經過上述過程,實現船舶紅外圖像檢測。
2 實驗分析
在MatLab 7.0軟件中測試本文方法的應用效果,將某地區海事管理部門實際采集船舶紅外圖像數據庫作為試驗對象,該數據庫中包括不同距離采集的船舶紅外圖像,試驗數據庫見表1。
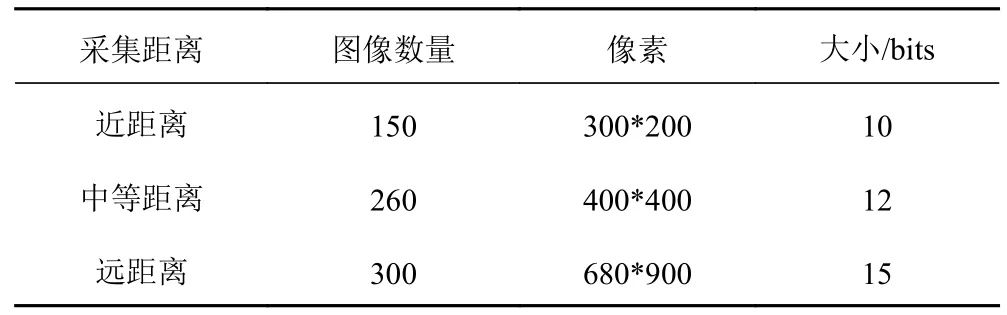
表1 試驗數據庫Tab.1 Test database
設置分別用W,B表示 ι ?τ的噪聲圖像與干凈圖像,均方差誤差(MSE)表達式如下:
峰值信噪比(PSNR)作為評價指標,其計算公式如下:
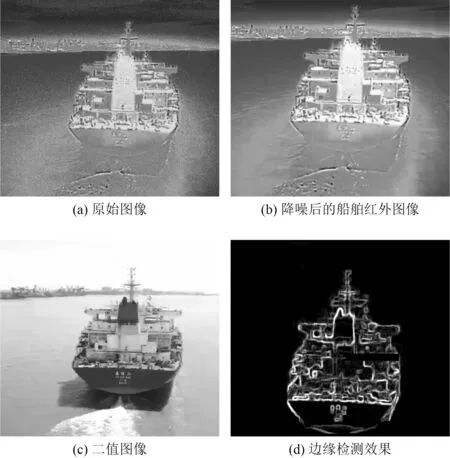
其中,最大像素值用MAXB描 述。當PS NR>40表示圖像質量極好, 2 0 采用基于塊匹配的PCA 算法對試驗數據庫中船舶紅外圖像進行降噪處理后,取試驗數據的平均值,統計出本文方法對于不同距離采集船舶紅外圖像降噪后PSNR,結果見表2。分析可知,采用基于塊匹配的PCA 算法對于不同距離采集船舶紅外圖像實施降噪后PSNR 值均有所提升,本文方法降噪后PSNR 值全部高于40 dB,說明本文方法降噪效果較好,同時適用于不同噪聲標準差下的船舶紅外噪聲圖像去噪。 表2 不同距離采集船舶紅外圖像降噪PSNR(dB)Tab.2 PSNR of infrared image noise reduction of ships collected at different distances(dB) 在試驗數據庫中隨機選取1張近距離采集的船舶紅外圖像,采用本文方法對其紅外圖像實施邊緣檢測,邊緣檢測結果見圖2。分析圖2(a)可知,受霧天的影響采集原始船舶紅外圖像中存在大量噪聲,同時圖像清晰度較低;由圖2(b)可知,采用基于塊匹配的PCA 算法對近距離采集原始船舶紅外圖像實施降噪處理,經PCA 反轉換有效去除原始圖像中多余噪聲,保留較好船舶紅外圖像邊緣數據,經去噪后圖像清晰度得到顯著提高,視覺效果優良;由圖2(c)可知,采用梯度算子將降噪后船舶紅外圖像轉換為二值圖像,保留完整的船舶紅外圖像中數據,為改進神經網絡的檢測奠定基礎;由圖2(d)可知,將二值圖像作為改進神經網絡輸入,經過學習訓練輸出船舶紅外圖像邊緣檢測結果,采用本文方法可準確檢測出船舶紅外圖像邊緣,邊緣檢測結果的清晰度高且連貫,達到船舶紅外圖像邊緣檢測標準,有利于船舶分類管理。 圖2 本文方法的船舶紅外圖像邊緣檢測結果Fig.2 Edgedetection results of ship infrared image based on this method 因船舶紅外圖像中含有大量噪聲數據,加大了船舶紅外圖像邊緣檢測難度,本文研究基于改進神經網絡的船舶紅外圖像邊緣檢測方法,提高船舶紅外圖像邊緣檢測速度,便于對船舶管理。 試驗結果表明,本文方法可有效提取船舶紅外圖像真實邊緣,其應用效果較好。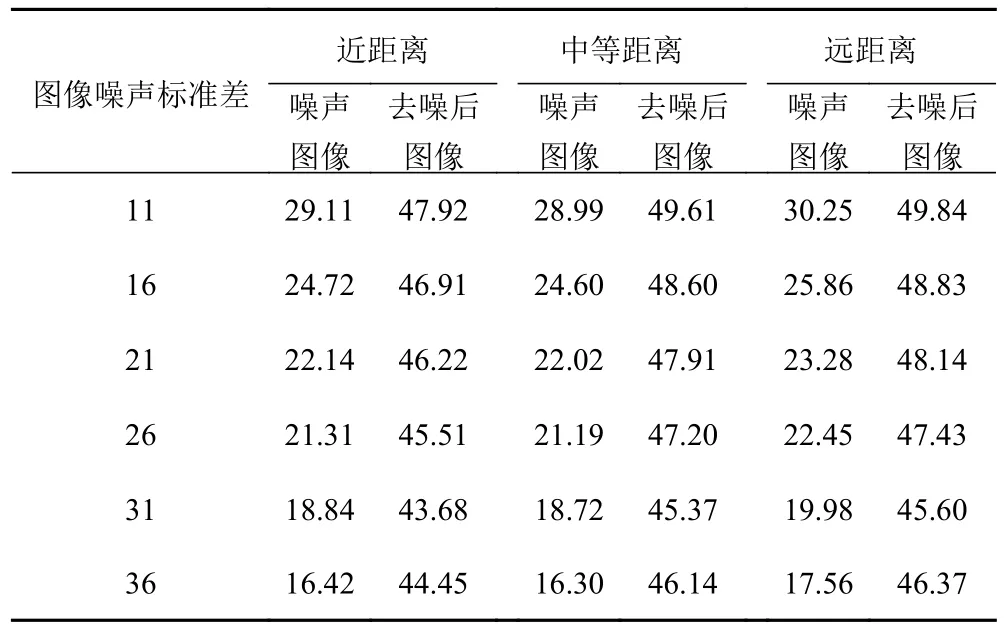
3 結語
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
意林原創版(2016年10期)2016-11-25 10:28:30
海峽科技與產業(2016年3期)2016-05-17 04:32:12
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
