通感一體化關鍵技術與應用
2023-05-13 08:44:50李萍LIPing郭曉江GUOXiaojiang
中興通訊技術 2023年2期
李萍/LI Ping,郭曉江/GUO Xiaojiang
( 中興通訊股份有限公司,中國 深圳 518057)
通信系統和感知系統一直以來被作為兩個獨立的系統進行研究,但是這兩個系統又有很多相似之處。通信感知一體化通過空口及協議聯合設計、頻譜資源共享、軟硬件設備共享等手段,實現通信、感知、計算功能的一體化設計,達到通信功能與感知功能的融合共生。通信感知一體化在進行信息傳遞的同時,還能通過分析無線電波的直射、反射、散射等特性,對目標或環境信息等進行定位、測距、測速、成像、檢測、識別、環境重構等[1]。無線通信感知一體化不僅開辟了全新的業務,還具有超越傳統移動通信網絡連接的潛力,因此得到了產業界的廣泛關注。學術界和工業界普遍認為,通感一體化將成為5G-A和6G無線通信系統最核心的特性[2-5]。
通信系統主要采用正交頻分復用(OFDM)波形,而傳統雷達感知系統主要采用線性調頻(LFM)波形。通信感知一體化系統的目標是實現一體化波形。早期M. ROBERTON等先獲得獨立的通信波形和雷達波形,再采用疊加的方式實現一體化波形[6]。隨后產生了最小頻移鍵控(MSK)和線性調頻(LFM)信號結合的MSK-LFM、OFDM 和LFM 相結合OFDM-LFM、多輸入多輸出正交頻分復用(MIMO-OFDM)等一體化波形設計方法[7-10]。通感一體化采用OFDM 波形或者擴展的OFDM波形來實現感知功能的趨勢越來越明顯。
通信系統一般采用基站A發送-基站B接收的工作模式,而傳統的雷達感知系統往往采用基站A 發送-基站A 接收的工作模式。相比于基站A 發送-基站B 接收的工作模式,基站A 發送-基站A 接收可以顯著降低組網的難度,減少波束掃描開銷。高頻段尤其是毫米波和太赫茲等波段對基站A發送-基站A接收模式的需求更加迫切。傳統基于基站A發送-基站A 接收工作模式的感知方案主要包括兩大類:1)連續波體制方案。該方案的優點是沒有近距離盲區,缺點是對收發隔離度的要求非常高,一般應用于毫米波及以上波段;2)脈沖體制方案,該方案的優點是可以完全復用通信天線,獲得全陣面的增益,缺點是存在近距離盲區,一般應用于X波段及以下波段。通感一體化有源天線單元(AAU)技術往往需要融合空域自干擾消除、射頻域自干擾消除、中頻域自干擾對消和數字域自干擾消除等先進技術解決方案[10-11]。
針對通信感知一體化信號處理,現有文獻主要研究了距離維處理、多普勒維處理、空間維處理等方法,以實現測距、測速、測角等多種功能[12]。L. GABBIEL 等針對OFDM相位編碼信號提出了一種新的脈沖壓縮方法,該方法基于FFT 且等效于匹配濾波方法[13]。DUAN J. Q.提出了針對OFDM信號的幾種多普勒處理方法,以便更好地估計目標的徑向速度[14]。劉永軍等采用子空間投影方法實現對目標的距離與多普勒的超分辨估計[15]。這些一體化信號處理方法大多采用一個或者幾個維度進行濾波匹配,忽略了感知系統中各個參數整體性能的提升。經過理論分析,我們認為通感一體化系統的性能主要受限于空間維度,基于通感一體化波形提出多維參數聯合和級聯的估計方法,最后提出通感一體化高分辨率信號處理方法。所提方法可以有效均衡各個維度參數估計的性能,大大降低計算復雜度。
1 通感一體化關鍵技術
1.1 感知距離方程
通感一體化系統對目標的感知大致包括如下4 個過程:1)發射機發射無線電波;2)無線電波照射到目標后進行反射;3)經過目標的反射回波被接收機接收;4)接收機對回波信號進行處理,檢測是否存在目標,并對目標的參數進行估計。參考雷達方程[16-17],感知系統接收端采用匹配濾波算法處理后的信噪比(SNR)一般可以表示為:
其中,SNR表示經接收機經過處理后目標的信噪比,Pt表示無線信號的平均發射功率,Gt和Gr分別表示發射天線和接收天線的增益,λ表示系統載波波長,σ表示目標的雷達散射截面積(RCS),τ表示一個感知脈沖或者符號的發射信號時長,Nsym表示系統波束駐留目標期間接收的感知脈沖或者符號的個數;γ表示雷達接收機進行脈沖或者符號積累的效率(γ ≤1),R 表示目標到天線的距離。k 表示玻爾茲曼常數,取1.38 × 10?23J/K。T 表示標準溫度,一般可取290 K。F表示系統噪聲系數,L表示整個系統的損耗。
對于商用毫米波基站來說,其發射波束的等效全向輻射功率(EIRP)等價于PtGt。假設接收天線增益Gr= 24 dB,目標的雷達散射截面積σ = 0.02 m2,1 個用于感知的OFDM符號長度τ = 8.3 μs,26 GHz 載波頻率對應的載波波長λ =0.011 5 m,系統的噪聲系數和損耗假設為FL = 8 dB。根據雷達方程公式得出的不同感知距離下接收端的SNR如圖1所示。可以看出,當EIPR 為60 dBm、Nsym=100、σ = 0.02 m2時,目標距離基站1 km 時接收端處理后的SNR>10 dB。也就是說,現行商用5G 毫米波基站對σ = 0.02 m2的目標的感知距離大于1 km。
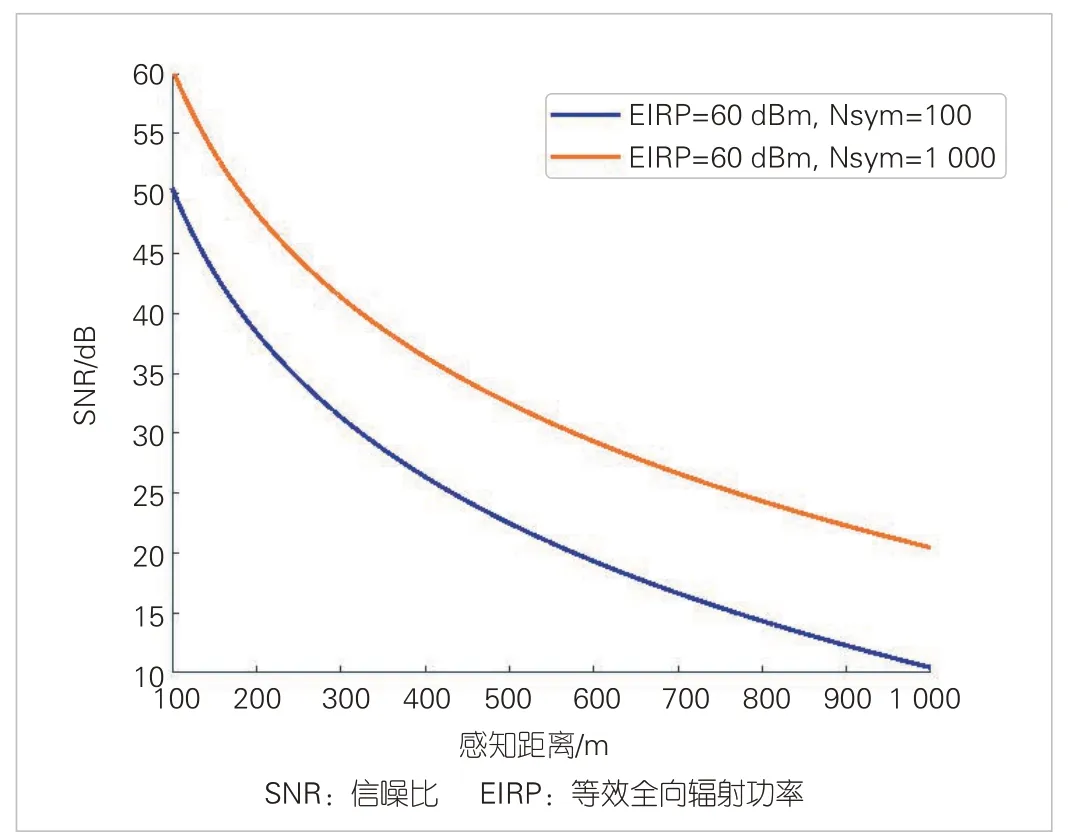
▲圖1 感知距離和接收端SNR關系
1.2 感知性能指標
無線感知性能可以從分辨率、精度等方面來描述。感知的分辨率表示可以被系統區分的兩個相鄰目標的最接近程度,主要包括距離分辨率、角度分辨率和速度分辨率。其中,距離分辨率取決于信號帶寬,角度分辨率取決于天線的半功率波束寬度,速度分辨率取決于感知信號相參積累時間。通常情況下,上述3個維度都無法被分辨的情況是很少的。感知的精度表示測量值和真實值的誤差,通常用均方根誤差來表示,主要包括距離精度、角度精度和速度精度等。感知精度除了和信號帶寬、天線波束寬度、信號相參積累時間有關外,還和回波信號的SNR 相關。感知分辨率和精度的相關理論值[18]如表1所示。
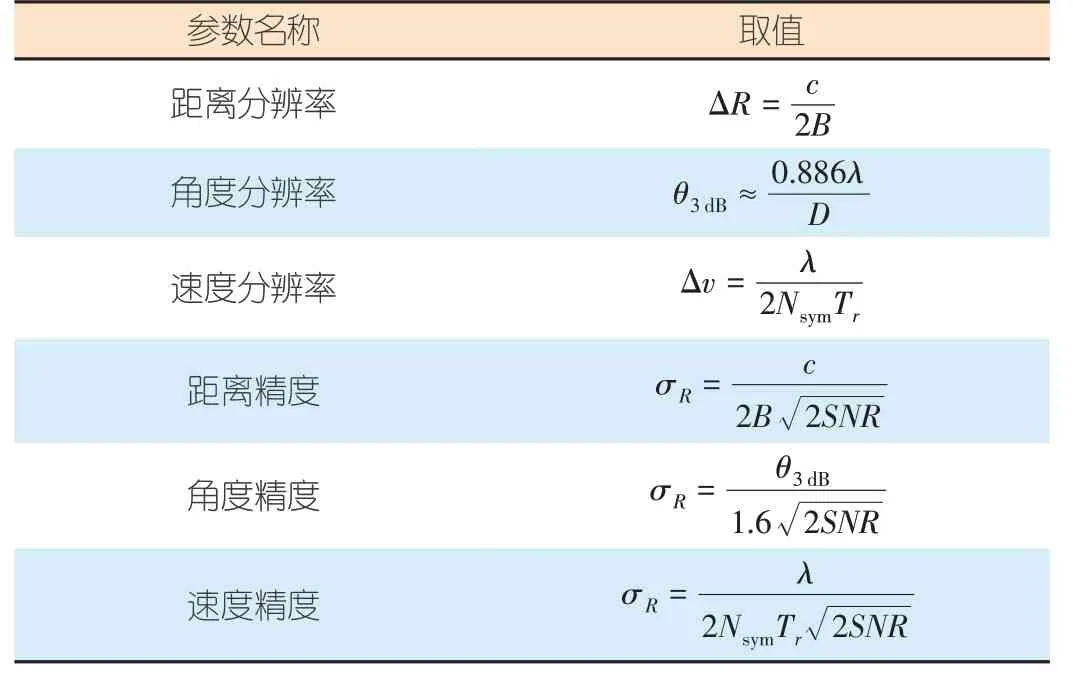
▼表1 感知分辨率和精度
其中,c 表示光速,B 表示信號帶寬,D 表示天線陣列孔徑,Nsym表示感知信號脈沖或者符號個數,Tr表示感知脈沖或者和符號的重復周期。從表1可以得出:距離分辨率可以通過信號帶寬獲取,并且隨著通信系統帶寬的不斷增加,距離分辨率已經不是感知的短板;速度分辨率可以通過增加感知信號時長獲取,這在感知系統中也是相對容易實現的;而角度分辨率則需要增加陣列孔徑長度,通常來說這是不現實的。對于陣元間距為半波長、陣列結構為8 × 8的均勻線陣來說,孔徑長度,其角度分辨率(3 dB波束寬度)θ3dB≈12.7°。這樣的波束寬度在很多應用場景下難以滿足分辨率要求,比如智慧交通場景中距離和速度相同而角度差異較小的行人和車輛的分辨,因此超高分辨的角度估計算法一直是熱門研究領域。
1.3 一體化感知算法
在未來5G-A和6G的通感一體化系統中,采用通感一體化基站、一體化OFDM 波形進行感知是未來的重要演進方向。本文給出了一種基于OFDM波形的感知系統模型和感知算法處理方案。
1.3.1 系統模型
假設用于感知的基站(BS)或者用戶設備(UE)的天線陣列的坐標模型如圖2 所示,其中θ 為天頂角,φ 為方位角。θ = 0°表示天頂方向,θ = 900表示水平方向,該面陣位于yoz平面上。
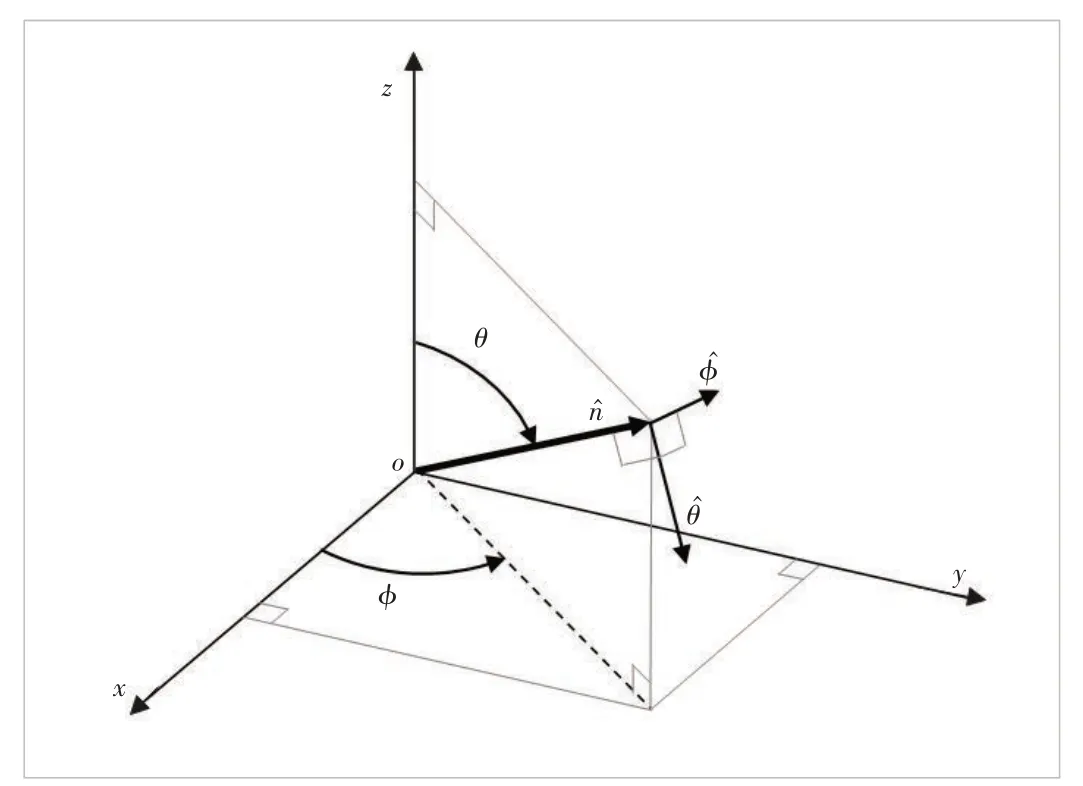
▲圖2 天線陣列坐標模型
假設均勻面陣的橫向天線陣子數為M,縱向天線陣子數為N,橫向和縱向的陣元間距分別為dH和dV。那么該陣列的導向矢量可以表示為:
其中,
對此,我們可以將sin θ sin φ視為沿y軸的空間頻率,將cos θ視為沿z軸的空間頻率。
對于接收端來說,如果采用OFDM信號用于感知,那么去掉母碼后,第(n,m)個天線的第l 個OFDM 符號第k 個子載波的頻域信道可以表示為:
其中,Ntar表示目標個數,htar是一個和目標散射特性相關的復數,τtar表示目標時延,Tr表示用于感知的相鄰OFDM 符號之間的間隔,n表示噪聲。公式(5)中的相位第1項表示由目標距離產生的時延導致的相位偏移,第2項表示由目標Doppler運動產生的相位偏移,第3項和第4項表示由天線位置產生的相位偏移。
1.3.2 OFDM信號匹配濾波感知算法
假設OFDM 信號有K 個有效子載波,定義一個和距離(時延)相關的矢量:
假設采用L 個OFDM 符號進行感知,定義一個和速度(Doppler)相關的矢量:
采用OFDM 進行感知時,回波信號的頻域H(k,l,n,m)為K × L × N × M 的矩陣,將其拉直可得vec(H)。vec(H)是一個列向量,其維度為KLNM × 1。
在高斯白噪聲條件下,采用匹配濾波能夠獲取最佳SNR,從而提高目標的檢測能力。采用匹配濾波估計目標的參數(τ,fd,θ,φ),具體表達式為:
顯然,公式(8)是一個關于(τ,fd,θ,φ)的四維匹配濾波過程,搜索次數至少為KLNM,共需要(KLNM)2次復乘法和(KLNM)2次復加法,復雜度非常高,不適合工程應用。
在損失一定匹配濾波性能的基礎上,將上述(τ,fd,θ,φ)的聯合匹配濾波改為級聯匹配濾波,即對每個參數分別搜索,將四維搜索問題轉換成4種一維搜索問題,從而大大降低計算復雜度,這也是目前雷達系統通用的處理手段。通感一體化回波信號的感知級聯處理流程如圖3所示,在三維角度空間中的空間維處理包括方位維處理和俯仰維處理。
距離維搜索需要進行LNM 次搜索,單次搜索的式子可以表示為:
速度維搜索需要進行KNM 次搜索,單次搜索的式子可以表示為:
俯仰維搜索需要進行KLM 次搜索,單次搜索的式子可以表示為:
方位維搜索需要進行KLN次搜索,單次搜索的式子可以表示為:
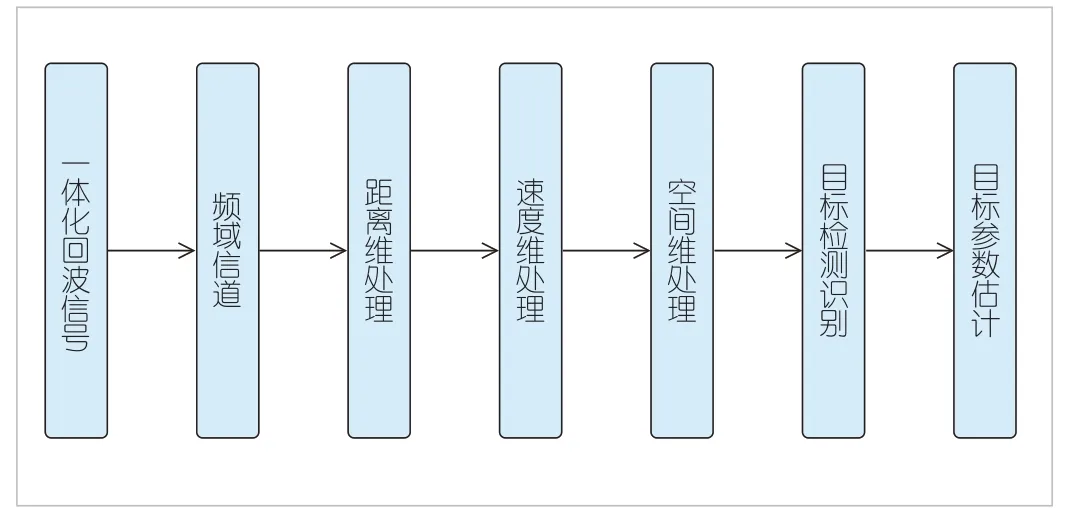
▲圖3 一體化回波信號的感知級聯處理流程
上述4種一維搜索的檢索順序可以任意調換,不影響最終結果。每個維度搜索的復雜度均為KLNM 次復乘法和KLNM次復加法。4個維度級聯搜索后共需要4KLNM次復乘法和4KLNM次復加法,復雜度降低到原來的4/(KLNM)。
1.3.3 OFDM信號空時頻級聯感知算法
匹配濾波感知算法實現簡單,復雜度相對較低,但是分辨率較低,在很多情況下難以滿足應用需求。將超分辨算法引入OFDM信號的感知,可以大大提高系統分辨率。常用的超分辨算法有Burg最大熵算法、Capon最小方差法、多重信號分類(MUSIC)算法[19]、基于旋轉不變技術的信號參數估計(ESPRIT)算法[20]、傳播算子(PM)算法[21]等。其中,MUSIC算法是超分辨譜估計理論中的一個標志性常用算法,它開啟了特征結構類算法的新時代。MUSIC算法對自相關矩陣進行特征分解,以得到相應的信號子空間與噪聲子空間,并利用這兩個子空間的正交性進行信號參數的估計。
要獲得OFDM 波形的超分辨感知,需要先計算信道H(k,l,n,m)的協方差矩陣RHH:
其中,E{ }表示對多個樣本求期望。接著對RHH進行特征分解:
其中,Us和Un分別表示回波信號的信號子空間和噪聲子空間。那么用于感知目標參數(τ,fd,θ,φ)估計的MUSIC 譜可以表示為:
其 中,a(τ,fd,θ,φ)= aY(θ,φ)?aZ(θ)?sv(fd)?sr(τ)。上述MUSIC譜包含了方位-俯仰-距離-速度4個維度,進行特征分解和譜峰搜索的復雜度非常高,難以實現工程應用。為了得出一種工程可實現的算法,將上述聯合估計轉換成距離-速度-空間的級聯處理,即距離維搜索和速度維搜索采用常規匹配濾波算法,方位和俯仰維角度估計采用超分辨算法。這主要是由于:對基站來說,在距離維和速度維獲取高分辨率相對容易,而在空間維度獲取高分辨率常規算法需要很大的天線孔徑。
假設在(τ,fd)處存在目標,那么采用MUSIC 算法進行角度估計時,需要計算的協方差矩陣可以表示為:
由于進行了距離維-速度維處理后,在(τ,fd)處的目標變成了單次快拍(往往只有一個樣本),且在該點處不同目標的距離和速度相同。也就是說,哪怕是獲得多個樣本,不同目標之間也是相干的。協方差矩陣Rτ,fd的秩為1。進行特征分解后噪聲子空間被信號子空間污染,最終使得MUSIC 算法的性能急速惡化,甚至還不如常規匹配濾波算法。為了解決這個問題,空間平滑算法[22]被引入以恢復MUSIC的超分辨能力。空間平滑算法的核心思想是將整個陣列分成若干陣列結構相同的子陣。假設第p個子陣的協方差矩陣為Rp,τ,fd,那么第p 個子陣的距離維和速度維匹配濾波后的結果可以表示為:
其中,Nsub= N + 1 ?P,Msub= M + 1 ?P,那么第p個子陣的協方差矩陣Rp,τ,fd可以表示為:
采用前向空間平滑后的協方差矩陣為:
雖然將四維的MUSIC 譜簡化成二維的MUSIC 譜可大大降低復雜度,但是仍然需要二維譜峰搜索,復雜度仍然非常高。為了進一步降低復雜度,這里引入root-MUSIC 算法[23],該算法可以避免譜峰搜索,從而大大降低復雜度。
Root-MUSIC算法需要先定義一個多項式:
其中,p(z)=[1 z … zM?1]T。定義當z = exp(jω)時,多項式的根正好位于單位圓上,只要獲得上式的根即可獲得目標的角度信息。顯然上述求根公式只適合均勻線陣。當采用一個垂直維度的均勻線陣進行角度估計時,假設? 為第i個位于單元圓上的根,那么垂直維度的角度可以通過公式(22)估計:
對基站來說,當天線陣為二維陣時,需要將二維陣轉換成兩個一維陣,然后分別采用root-MUSIC 算法獲取目標的方位角和俯仰角,這里不再贅述。
2 通感一體化應用
從通信感知一體化的初衷來看,通信感知一體化系統基于獲得的感知信息,可提供定位、成像、虛擬環境重構等服務。此外,這些服務還可以用于提升移動通信的自身性能。在所能獲得的感知信息和服務基礎之上,通信感知一體化系統將更好地服務于未來智慧低空、智慧交通、智慧生活等。
2.1 智慧低空
近年來,中國民用無人機市場規模快速增長。2020—2024 年,中國民用無人機產業年復合增長率超過50%。2020 年民航局批準13 個無人機試驗基地。工業無人機市場規模年增長率超過50%。2025 年無人機將實現規模商用。對無人機進行有效探測和管控,是產業規模發展的前提。無人機探測是近年來的重要研究方向。未來3~5年,無人機監控和防御的市場規模超過330億元[24]。
傳統的低空雷達方案面臨3 個困境。1)部署成本高:需要在敏感空域重新部署低空警戒雷達;2)頻譜資源短缺:目前雷達頻段一般主要是24 GHz和77 GHz;3)感知范圍受限:大多數雷達的EIRP 受限導致最遠感知距離有限。通感一體化方案助力智慧低空發展,在智慧低空中的主要應用包括:無人機入侵檢測、無人機監管和避障、無人機路徑管理等。
相比于傳統的低空雷達方案,通感一體化無人機感知方案具有3 個明顯的優勢:1)部署成本低,可在傳統基站上部署感知功能;2)頻譜可以共享,即通信和感知共享頻譜,提高了頻譜利用率;3)感知范圍廣,例如單站感知距離超過1 km,依賴5G基站可實現大范圍連續覆蓋。
2022年8月,中國聯通攜手中興通訊在上海完成低空無人機通感算控一體化驗證測試。該測試以低空園區安防應用場景為背景,采用24 GHz 毫米波單AAU實現通信和感知信號的發送與接收。低空無人機的感知精度達到亞米級,探測距離超過1 km,通信和感知過程中性能良好穩定。2022 年11月,在IMT-2020(5G)推進組的指導下,中興通訊使用4.9 GHz 低頻5G 商用基站,實現了室外無人機超過1 400 m的感知距離。智慧低空場景的通感一體化平臺如圖4所示。
2.2 智慧交通
通感一體化在智慧交通中的應用目前聚焦于車輛信息統計、行人入侵檢測、輔助無人駕駛等方面。當前主流的智慧交通方案可以分為兩大類:單車智能方案和車路協同或者通感一體方案。
單車智能方案主要采用汽車雷達和攝像頭等,但存在以下缺陷:1)覆蓋有盲區:單車感知覆蓋區域成扇形,有盲點區域;2)瞬時誤差大:單車由于移動速度快,只掌握瞬時的感知信息,目標虛警漏警概率大;3)遮擋影響大:容易產生前車遮擋,無法檢測被遮擋區域狀況;4)感知距離短,且不能全天候感知:惡劣天氣感知范圍大大縮減,無燈光感知效果也受限。
相比而言,通感一體方案在以下方面具有明顯優勢:1)自動駕駛需要車路協同,通感一體與單車雷達是互補和協同關系;2)通感一體化系統不需部署新系統,具有無縫、全天候、低時延等優勢,可滿足控制輔助、服務車聯網等應用需求。
2022年11月,在IMT-2020(5G)推進組指導下,中興通訊采用24 GHz 毫米波通感一體基站,在上海城市開放道路(雙向六車道)完成了車輛和行人感知測試,實現了超過800 m的感知距離和車道級的感知精度。隨后,中興通訊使用4.9 GHz低頻5G商用基站,完成了室外無人機、車輛和行人感知測試驗證。驗證結果顯示,在一定環境下室外能夠同時實現無人機、車輛和行人多目標移動軌跡感知,初步驗證了低頻感知在低空安防、交通安全管理等的應用可行性。
2.3 智慧生活
通感一體化在智慧生活方面的應用目前主要聚焦于呼吸監測、入侵檢測、健身檢測、手勢檢測、天氣檢測等方面。傳統的智慧生活檢測方案存在諸多限制,例如:1)需要檢測儀或者可穿戴設備進行接觸式檢測;2)需要額外安裝攝像頭、傳感器、探測器等,部署成本較高;3)感知范圍往往較短;4)視頻類傳統檢測方案涉及個人敏感信息。
相比而言,通感一體化方案在智慧生活方面具有諸多優勢:1)采用無線信號,可以進行全天候非接觸式檢測和識別;2)在基站上部署感知功能,不需要額外部署新系統,具有無縫、廣覆蓋等優勢;3)不涉及個人敏感信息等。
2022 年11 月,在IMT-2020(5G)推進組指導下,中興通訊使用4.9 GHz低頻5G商用基站,在室內場景下開展了視距和非視距呼吸感知測試。其中,在視距場景下呼吸監測能力與商用呼吸監測儀表相當,可助力健康管理等感知應用。
3 結束語
通感一體化開辟了全新的業務方向,賦予無線網絡感知物理世界的能力,既充分滿足多維感官的交融互通需求,又有效支撐通信能力的廣域拓展,具有超越傳統移動通信網絡連接的巨大潛力。本文概述了5G-A和6G演進過程中通感一體化的應用方向,給出了基于現有通信基站的感知能力邊界,以及通感一體化系統參數估計的匹配濾波算法,最后提出了一種高分辨率、低復雜度的感知信號處理算法,有助于推動通感一體化技術從理論走向實際應用。
致謝
本研究得到中興通訊股份有限公司耿鵬、崔亦軍、趙志勇、竇建武、吳建軍等專家的幫助,在此對他們表示感謝!
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25