基于3D機械控制的瀝青路面施工攤鋪技術研究
2023-05-16 16:20:50王文學李昌華張文聞吳方鈺俞騰翔
科技資訊 2023年7期
王文學 李昌華 張文聞 吳方鈺 俞騰翔




摘要:為研究基于3D機械控制的瀝青路面攤鋪施工攤鋪技術,該文分析了3D機械控制原理,并闡述了3D機械控制的瀝青路面施工攤鋪流程和質量控制方法,依托實際工程,對傳統攤鋪施工和3D攤鋪施工后的厚度、平整度進行檢測,結果發現基于3D機械控制的瀝青路面攤鋪效果優于傳統攤鋪方式,提高了路面攤鋪的精準化、智能化和自動化。
關鍵詞:道路工程??3D機械控制??攤鋪??施工
中圖分類號:TU753??文獻標識碼:A
Research?on?Asphalt?Pavement?Construction?Paving?Technology?Based?on?3D?Mechanical?Control
WANG?Wenxue1??LI?Changhua1?ZHANG?Wenwen1??WU?Fangyu2??YU?Tengxiang1
(1.?Construction?headquarters?of?Ningbo?Zhoushan?Port?Main?Channel?Project,?Ningbo,?Zhejiang?Province,?316000?China;?2.?Zhejiang?University,?Hangzhou,?Zhejiang?Province,?310058?China)
Abstract:?In?order?to?study?asphalt?pavement?construction?paving?technology?based?on?3D?mechanical?control,?this?paper?analyzes?the?principle?of?3D?mechanical?control,?and?expounds?the??process?and?quality?control?method?of?asphalt?pavement?construction?paving?with?3D?mechanical?control.?Based?on?the?actual?project,??it?tests?the?thickness?and?flatness?after?the?traditional?paving?construction?and?3D?paving?construction,?and?finds?that?the?effect?of?the?asphalt?pavement?paving?based?on?3D?mechanical?control?is?better?than?that?of?the?traditional?paving?method,?which?improves?the?accuracy,?intelligence?and?automation?of?the?pavement?paving.
Key?Words:?Road?engineering;?3D?mechanical?control;?Paving;?Construction
自改革開放以來,我國道路需求量大,發展迅速,相應的建設技術也在不斷提高。瀝青路面具有行車舒適、無揚塵和泥漿、自修復能力強等優點,廣泛應用于高等級公路建設中。研究發現,攤鋪技術是影響瀝青路面施工質量的核心技術,而我國攤鋪技術由開始的人工攤鋪發展為機械攤鋪,提高了施工精度和效率,大大節約了成本[1]。
近年來,3D技術逐漸應用到工程領域,后被延伸到路面攤鋪中,也由此產生了3D攤鋪技術。祖民星[2]通過對3D智能攤鋪系統的原理進行研究,同時依托實際工程分析了3D智能攤鋪的效能。雷小磊[3]結合工程實例,闡述了3D攤鋪控制技術的原理。盧俏宇[4]對3D攤鋪技術系統的主要設備和工藝流程進行分析,并結合工程實例,評價了3D自動化攤鋪技術具有良好的應用效果。相較于機械攤鋪技術,3D攤鋪技術結合了機械控制技術、北斗定位技術和計算機技術,實時定位攤鋪機運行軌跡,實時監測并反饋攤鋪狀態,從高程、厚度和寬度三方面實現對瀝青路面攤鋪的自動化、智能化和精準化控制。該文基于對3D機械控制的工作原理分析,闡述了瀝青路面攤鋪施工技術流程,并依托實際工程進行實施效果分析,對進一步提高我國瀝青路面攤鋪質量,提升工作效率具有重要意義。
3D機械控制系統主要由攤鋪機、測量設備、機械設備及軟件系統四部分組成,如圖1所示。測量設備以全站儀為主,機械設備為攤鋪機和液壓系統。在攤鋪施工前,建立瀝青路面設計高程、坐標、橫縱坡坡度等參數的三維模型,并將其與現場導線結合,使用全站儀完成基準測量工作。在攤鋪過程中,攤鋪厚度主要依靠攤鋪機的熨平板進行調整,通過將建立的三維模型導入攤鋪機的操作系統中,可以實時獲得熨平板的三維坐標和角度姿態,根據當前的三維坐標和角度分別計算熨平板的坐標偏差和角度偏差,將偏差信號傳遞給控制轉換器,控制轉換器接收信號并發送指令給閥控模塊,施工中攤鋪機通過指令實現對牽引臂油缸和熨平板的操作、調整、控制和修正,確保攤鋪機能夠根據路面坡度和高程變化及時調整攤鋪厚度。
2基于3D機械控制的瀝青路面施工攤鋪技術
該文通過總結工程應用經驗,對3D機械控制的瀝青路面攤鋪施工技術展開研究,主要包含三維建模、設備安裝、全站儀布設、施工過程控制和攤鋪質量控制五方面,具體流程如圖2所示。
2.1三維建模
首先找到圖紙中設計橫縱坡、平曲線、豎曲線坐標、高程等參數,并對下承層中每個10?m的斷面上采集不少于三個點的三維坐標。根據設計要求及三維坐標點建立三維模型,通過檢查確保建立的模型無異常點,且厚度和坡度等符合設計要求,最后生成坐標文件、線形文件和模型文件。
2.2設備安裝
在對攤鋪機3D機械控制改造研究過程中,發現設備安裝需要注意以下幾點要求。
(1)桅桿應垂直安裝在攤鋪機大臂上,同時距離油缸距離不能小于30?cm,360°反射棱鏡應固定安裝在桅桿頂端。
(2)傾角傳感器應固定安裝在熨平板上,且方向應與攤鋪機前進方向一致。
(3)數據電臺應固定安裝在攤鋪機頂棚上方,保證其與測量機器人之間視野暢通。
(4)主控制器應安裝于攤鋪機的易操作位置。
(5)其余控制部件和傳感器的連接線應固定安裝在攤鋪機合適位置,確保不會影響攤鋪機的正常工作。
(6)設備安裝完成后需立即進行調試校準,確保各部分都運轉正常。
2.3全站儀布設
全站儀根據已知水準點和后方交會建站,建站需確保棱鏡與全站儀之間視野開闊,且周圍無電子設備干擾。全站儀布設時需注意以下幾點:
(1)遠離高邊坡、行車段和施工場地,避免影響測試精度;
(2)配備專門技術人員進行看管;
(3)保證全站儀與導線點之間的夾角在15°~165°之間;
(4)測量結束后全站儀應放入專用防護箱內,避免磕碰;
(5)安排專業技術人員定期對全站儀進行檢驗校核。
2.4施工過程控制
施工前,將各文件和模型導入智能跟蹤全站儀和智能監測全站儀中,同時檢查全站儀與棱鏡之間的視野,確保可以清晰觀察到棱鏡,一般全站儀與棱鏡之間的距離控制在300~400?m之間。將攤鋪機和智能控制系統全部打開,測試其是否都可以正常運轉。在進行攤鋪施工時,打開預先導入的模型文件,將攤鋪機的控制系統調節為機械控制模式,使機器人可以自動跟蹤360°棱鏡。正式攤鋪施工前,試鋪一段路,并及時監測,確保攤鋪精度達到設計要求,方可將機械控制模式轉換為自動控制模式。如圖3所示,用于捕獲360°棱鏡三維坐標的跟蹤機器人架設于攤鋪機兩側,同時在后方還需要架設一臺檢測機器人,對攤鋪高程和橫坡進行實時監測,若不滿足要求,則需及時調整跟蹤機器人和控制器。在智能跟蹤機器人半徑150?m范圍內,都可利用智能檢測機器人進行交替轉站,以保證攤鋪作業的連續性。
2.5攤鋪施工質量控制
現場攤鋪結束后應立即采集路面數據,并進行攤鋪質量檢測,確保施工質量符合《公路工程質量檢驗評定標準》(JTG?F80/1)中的相關規定。若采用分段攤鋪方式,則每段攤鋪路面都需要進行質量檢測,而最終整理成報告的數據應為整個攤鋪路段的檢測數據。檢測過程中應隨時校核數據,發現問題時應加大檢測頻率和檢測精度,必要時可以采用人工補救。
3實施效果分析
3.1工程概況
北京至雄安新區高速公路河北段(以下簡稱為“京雄高速”)是北京中心城區連接雄安新區核心區的最便捷高速通道,是支撐新區規劃建設,促進京津冀區域協調協同發展的重要經濟干線。京雄高速河北段全長約70?km,主線均采用雙向八車道高速公路標準建設,設計速度為120?km/h,沿線設置監控通信分中心1處、服務區3處、養護工區2處、主線收費站2處、匝道收費站5處,特大橋8座,橋梁設計荷載等級為公路-I級。京雄高速作為北京中心城區連接雄安新區核心區的最便捷高速通道,具有支撐新區規劃建設、促進京津冀區域協調協同發展等重要作用。
3.2現場實施方案
該項目選取京雄高速K46+000到K48+000路段進行路面智能施工技術的應用,從人員、效率、質量等方面評價項目的實用性和穩定性,最終形成瀝青路面智能施工工藝。按照傳統攤鋪和3D攤鋪兩種方法平行施工,攤鋪機1安裝3D控制系統,攤鋪機2與攤鋪機3采用傳統2D攤鋪控制方式,如圖4所示。
3.3?施工質量檢測
3.3.1?厚度檢測
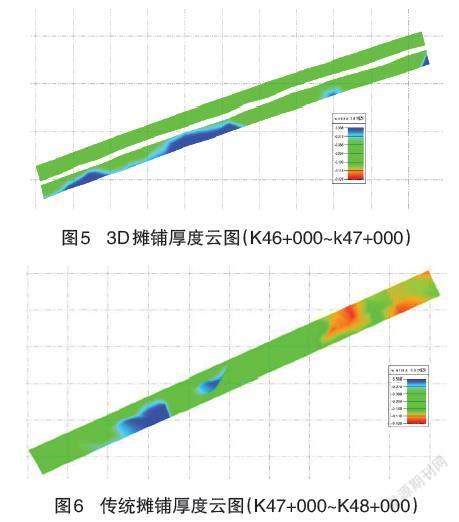
(1)全站儀測量法。
選取10?m一個斷面,使用全站儀測量每個斷面左右幅3點施工前后的高程差,最后生成3D攤鋪區域和傳統攤鋪區域的厚度云圖,如圖5、圖6所示。從圖中可以看出,3D攤鋪施工區域厚度均勻,誤差控制在1?cm以內,傳統施工區域,局部區域出現攤鋪過厚或偏薄的現象,圖中藍色區域為攤鋪過厚超過1?cm以上的區域,紅色部分為攤鋪偏薄超過1?cm以上的區域。
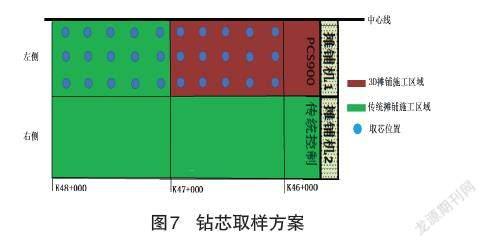
(2)鉆芯取樣法。
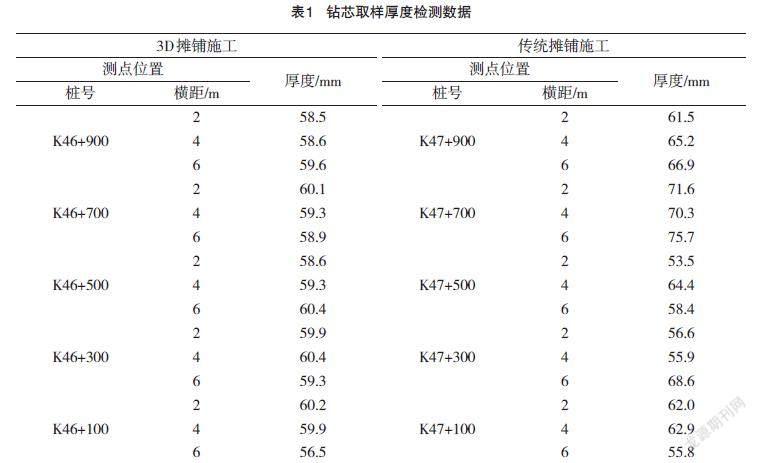
采用鉆芯機,在K46+000-K48+00范圍內,每200?m一個斷面,每個斷面采集3點,如圖7所示,采樣檢測數據見表1所示。
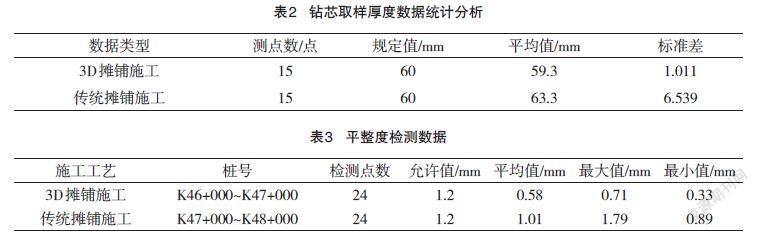
由表1和表2分析可知,采用3D攤鋪施工技術和傳統攤鋪施工技術厚度的平均值分別為59.3?mm和63.3?mm,均滿足規范要求,但是傳統攤鋪厚度偏大,造成瀝青混合料的浪費,增加了建設成本。從厚度均勻性方面分析可知,3D攤鋪施工技術和傳統攤鋪施工技術厚度的標準差分別為1.011和6.539,表明3D攤鋪施工技術控制厚度的性能遠高于傳統攤鋪技術。
3.2.2平整度檢測
瀝青路面施工完成后通過連續式平整度儀對3D攤鋪和傳統攤鋪施工效果進行檢測,結果見表3。
由表3可知,3D攤鋪施工和傳統攤鋪施工,平整度均小于允許值(1.2?mm),合格率為100%;采用傳統攤鋪工藝進行瀝青路面施工,平整度波動較大,最大值為1.79?mm,表明3D攤鋪工藝可以較好的提升路面平度[5-7]。
4結語
該文通過對3D機械控制原理進行分析,闡述了基于3D機械控制的瀝青路面施工攤鋪技術,并依托工程進行實際應用,得出以下幾點結論:(1)完成了攤鋪機3D機械控制模型和改造方案設計,形成了標準的3D機械控制施工攤鋪技術和施工質量控制方法;(2)基于3D機械控制的路面智能施工技術改變了傳統攤鋪施工方式,可以精準控制路面高程、平整度、壓實均勻性,實現精準化、智能化、自動化施工目的。
參考文獻
[1] 張媛芳,張媛.?3D攤鋪技術在瀝青混凝土路面施工中的應用[J].交通世界,2021(9):88-89.
[2] 祖民星.瀝青混凝土路面3D智能攤鋪應用研究[J].西部交通科技,2018(11):9-12.
[3] 雷小磊,李剛.3D攤鋪控制技術在瀝青混凝土路面工程中的應用研究[J].市政技術,2018,36(5):20-24.
[4] 盧俏宇,周洪劍.公路工程3D技術路面施工應用分析[J].西部交通科技,2018(3):18-21,140.
[5] 丁凱.高地隙噴霧機側傾穩定性建模及控制方法研究[D].石河子:石河子大學,2019.
[6] 張軍,盧海峨.3DmmGPS攤鋪控制系統在經烏高速公路水穩層施工中的試點應用[J].交通建設與管理,2021(2):89-91.
[7] 張帆,肖述文,涂一文,等.多軸機械臂3D打印的運動-擠料協同控制方法[J].機械設計與研究,2021,37(6):141-147,154.
猜你喜歡
北京測繪(2020年12期)2020-12-29 01:37:18
當代工人(2020年8期)2020-05-25 09:07:38
工程與建設(2019年3期)2019-10-10 01:40:18
工程與建設(2019年2期)2019-09-02 01:34:18
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
科技知識動漫(2016年8期)2016-07-29 20:40:09
電測與儀表(2016年9期)2016-04-12 00:29:52
兒童故事畫報·發現號趣味百科(2015年12期)2016-01-25 00:41:49
河南科技(2014年11期)2014-02-27 14:09:53
河南科技(2014年5期)2014-02-27 14:08:32