基于openmv的人形機器人軌跡跟蹤方法設計
2023-05-17 07:43:04于之洋魏友業(yè)張劍詮陳鴻林戴峻峰
儀器儀表用戶 2023年6期
于之洋,魏友業(yè),張劍詮,陳鴻林,戴峻峰
(淮陰工學院 電子信息工程學院,江蘇 淮安 223003)
0 引言
在當今的機器人技術領域內(nèi),研制出與人類具有著類似行走能力與思考能力且能夠隨著環(huán)境變化自行調(diào)整的雙足形仿人行走機器人一直是學術界的焦點和大眾關心的熱點問題。而其中,仿人機器人的視覺軌跡跟蹤方法一直是學術界研究的重點,雖然經(jīng)過了多年的研究,但是當今的仿人機器人的尋跡方法在穩(wěn)定性、自適應能力等方面仍有著極大的提升空間。這些能力的實現(xiàn)和提升還依賴于機械結構與算法設計的共同發(fā)展[1]。
本文提出了一種基于openmv的人形機器人軌跡跟蹤方法設計(以下簡稱軌跡跟蹤方法)。該軌跡跟蹤方法以多幀圖像為一個周期,根據(jù)工程實際對處理周期內(nèi)各個幀的結果賦予不同的加權值的方法進行設計。首先,分析了現(xiàn)有的具有視覺識別功能的人形機器人所存在的缺陷問題,針對其缺陷改進了機器人結構,并設計了基于單目視覺環(huán)境的軌跡跟蹤算法。
根據(jù)對工作環(huán)境信息掌握的程度不同,機器人路徑規(guī)劃可分為:環(huán)境信息完全已知的路徑規(guī)劃和環(huán)境信息完全未知或部分未知的路徑規(guī)劃[2]。目前,為實現(xiàn)人形機器人低速環(huán)境下的自主導航,學界內(nèi)多半選用在環(huán)境信息完全已知的路徑基礎上進行局部避障的方式。而軌跡跟蹤作為機器人的導航方式之一,能夠保證機器人在規(guī)定時間運動在指定的狀態(tài)附近[3]。
由于人形機器人在運動過程中視覺算法在不間斷地工作,讓機器人在一次運動過程中強行停止轉為去做其他動作無疑是不現(xiàn)實的,故而視覺算法所得出的大部分運動指令為冗余數(shù)據(jù)。在文中選擇將這些冗余數(shù)據(jù)通過加權計算的方式,對當前運動指令的正確性做出判斷。若判斷為錯誤,則直接將此次運動指令作廢處理,此方法可極大提升資源利用率從而增加尋跡的準確性。
1 人形機器人軌跡跟蹤方法
1.1 軌跡跟蹤方法概述
雙足仿人型機器人軌跡跟蹤算法是機器人在具有引導線、環(huán)境較為穩(wěn)定情況下進行行走的典型方法,軌跡跟蹤算法由兩個階段組成:在第一階段,根據(jù)所捕獲的圖像計算其所需跟蹤的軌跡處于空間中的坐標位置;在第二階段中,根據(jù)機器人當前所處狀態(tài)以及在此之前一段工程周期所給出的行動指令綜合判斷給出最優(yōu)的行動規(guī)劃,以此實現(xiàn)機器人的軌跡跟蹤算法。
如錢蘇珂[4]等提出的一種基于雙目視覺的移動機器人環(huán)境識別系統(tǒng),采用逐幀分析圖像,其根據(jù)當前環(huán)境規(guī)劃機器人未來所需行駛的路線的方法。當算法計算出新的路線時,會將之前所得出的路線整個廢棄,從而做到實時調(diào)整機器人的運動姿態(tài)。當機器人在實際的場景中運行時,算法運行所產(chǎn)生的結果大部分都為冗余數(shù)據(jù),被程序直接廢棄,圖片的利用率極為低下并且軌跡跟蹤的準確率不高,造成了資源的浪費以及無效計算。
本文所提出的軌跡跟蹤方法中的最佳行動規(guī)劃的判斷是結合當前狀態(tài)與一段周期內(nèi)的算法結果所給出的,所以這種軌跡跟蹤方法能夠產(chǎn)生較為優(yōu)秀的行動路徑規(guī)劃。就實驗結果而言,所提出的軌跡跟蹤方法能夠較好地減小機器人在跟蹤直線時左右搖擺而產(chǎn)生的資源浪費。同時,由于機器人軌跡跟蹤需要對大量數(shù)據(jù)進行處理,需要高效的計算能力,所提出的軌跡跟蹤方法能夠較好地解決如何重復利用有限的圖片資源及計算資源的問題。
1.2 系統(tǒng)功能描述
由于雙足仿人型機器人主要是在人類所設計的較為穩(wěn)定的環(huán)境中工作,整個軌跡跟蹤方法基于一個由擁有19個機械自由度的雙足仿人型機器人和openmv4單目攝像頭視覺系統(tǒng)。視覺系統(tǒng)安裝在機器人的胸腔部位,能夠在機器人的運動過程中實時采集圖像,機器人的雙足共有10個自由度,能夠完成基本的行走、轉彎及爬坡等功能[5]。
軌跡跟蹤算法程序位于以STM32H750VBT6芯片為核心并燒錄openmv系統(tǒng)框架的視覺控制單元中,其控制單元作為本文所用的雙足仿人型機器人的控制中樞,通過UART串口連接到機器人的舵機控制板實現(xiàn)對于機器人的行走姿態(tài)控制。
本文所提出的雙足仿人型機器人軌跡跟蹤系統(tǒng)結構框圖如圖1。
系統(tǒng)以圍繞STM32H750VBT6芯片所設置的控制板為主控,在其內(nèi)部搭建openmv框架對OV7725攝像頭采集到的圖像進行處理,通過LCD屏幕將處理后的圖像及運算結果可視化顯示出來[6],多個部位相結合從而構成了本文所提出的軌跡跟蹤系統(tǒng)硬件部分。通過串口通信的方式將主控與舵機控制模塊連接到一起,從而操作由舵機控制模塊及19個舵機組成的人形機器人運動系統(tǒng)。然后,使用硬件按鍵操作機器人的運行,并通過多個LED工作狀態(tài)指示燈顯示當前工作狀態(tài),便于操作人員調(diào)試與維護。
1.3 設計目標
本文所提出的軌跡跟蹤方法主要用于實驗室條件,具有引導線的情況下的人形機器人尋跡設計,能夠在實驗地圖上按著既定的軌跡進行軌跡跟蹤并最終到達指定的終點,完成實驗任務。
2 軌跡跟蹤方法設計
2.1 圖像獲取與處理
在實驗室條件下,采用OV7725型CMOS類型數(shù)字圖像傳感器進行圖像采集。該傳感器用來輸出2萬像素的圖像(160×120分辨率),輸出圖像采用RGB565數(shù)據(jù)格式,在獲取圖像的同時對圖像進行畸變矯正與圖像補償。所采取的圖像傳感器體積小巧、工作電壓低,以便于安裝在人形機器人上,同時支持利用VGA格式輸出圖象數(shù)據(jù)。
圖1為OV7725型圖像傳感器所采集的圖像,由于圖像平面上圖像點在幾何位置的誤差,從而造成了圖像與實際景物無法嚴格滿足中心投影關系,使得圖像產(chǎn)生畸變[7]。在收集到存在畸變的圖象后,圖像收集模塊采取軟件算法的方式對鏡頭畸變進行改正,圖2為改正后的圖像。

圖3 經(jīng)矯正后的圖像Fig.3 Corrected image
圖像采集系統(tǒng)采用LAB色彩空間模型,將采集到的圖像中處于閥值范圍內(nèi)的像素全部變成黑色,其余像素變?yōu)榘咨D4為經(jīng)過二值化算法后所得的輸出結果。

圖4 二值化處理后的圖像Fig.4 Image after binarization processing
2.2 畫面劃分
采取ROI(Region Of Interest)感興趣區(qū)對圖像區(qū)域進行劃分,如圖5所示。將圖像橫向劃分為5個矩形區(qū)域,縱向劃分為3個矩形區(qū)域,橫向區(qū)域從上至下分別為A區(qū)、B區(qū)、C區(qū)、D區(qū)以及E區(qū),縱向則忽略中間區(qū)域僅最左側的F區(qū)與最右側的G區(qū)。
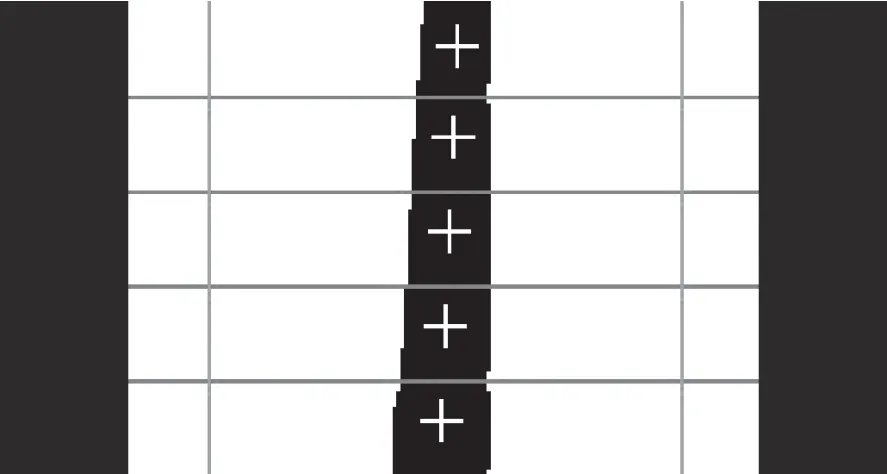
圖5 圖像區(qū)域劃分Fig.5 Image region division
2.3 圖像處理
如表1所示情況,將已劃分區(qū)域的圖像按照ROI分別檢測色塊,檢測色塊的核心思想為:分別在各區(qū)域內(nèi)尋找色塊,輸出色塊中心點的坐標并在其上繪制十字形標記,若無色塊則輸出整個圖像中心點的坐標以在運算過程中歸為可忽略誤差。
2.4 行動判斷
按公式對ABCDE區(qū)域和FG區(qū)域進行處理。
以整個圖片中心為二元坐標軸原點,由于圖片為160×120大小,則A區(qū)域左上角坐標為(-80,60),E區(qū)域右下角坐標為(80,-60)。在ABCDE區(qū)域內(nèi),y軸坐標可忽略,故而命其內(nèi)色塊的x軸坐標分別為ax、bx、cx、dx、ex。將以上5個坐標分別除以80用以進行歸一化處理,再按1:2:3:2:2的比例進行加權處理,則最終可得到基本x軸坐標如式(1)所示:

圖6 根據(jù)式(2)所分配權值得到的二維圖像Fig.6 2D Image obtained from the assigned weights according to equation(2)
將F、G區(qū)域內(nèi)的坐標分別表示為fx、fy、gx、gy,首先依照F、G區(qū)域內(nèi)色塊的有無及基本坐標x判斷當前路線類型,再根據(jù)fy、gy的相對位置依照表1所示的基本軌跡類型進行識別,從而依照軌跡類型及軌跡中心點坐標位置得出機器人運動指令。
2.5 結果作廢
由于人形機器人在運動過程中視覺算法在不間斷地工作,讓機器人在一次運動過程中強行停止轉為去做其他動作無疑是不現(xiàn)實的,故而視覺算法所得出的大部分運動指令為冗余數(shù)據(jù)。本文選擇將這些冗余數(shù)據(jù)通過加權計算的方式,對當前運動指令的正確性做出判斷。若判斷為錯誤則直接將此次運動指令作廢處理,此方法可極大提升資源利用率從而增加尋跡的準確性。
將上一小節(jié)所得到的運動指令與一個工程周期(此周期一般為機器人一次完整行動時間的1.5倍)內(nèi)的歷史運動指令進行比對,若運動指令相同則記為+1,若不同則記-1。將各個對比值依被對比的指令在工程周期內(nèi)的位置按式(2)分配以相應的權值。
設當前工程周期內(nèi)累計有α個運動指令,工程周期長度為t,各個歷史運動指令與當前指令所對比的值分別為α1、α2、α3……,故而獲取到如式(3)所示的作廢指令。
若y<0,則當前指令作廢,不進入歷史指令池;若y≥0,則將當前指令記入歷史指令池中。當機器人一次行動結束后統(tǒng)計一個工程周期內(nèi)出現(xiàn)次數(shù)最多的運動指令作為下一次行動指令。
3 結論
本文提出并設計了一種雙足仿人型機器人的軌跡跟蹤方法,此方法是基于STM32H750VBT6芯片與openmv軟件框架的使用。在本文提出的軌跡跟蹤算法中,先對圖像傳感器采集到的圖像進行劃分處理,再對于每一塊的圖像分別進行運算,最后進行數(shù)據(jù)匯總并對數(shù)據(jù)有效性進行判斷。此方法所使用的運算資源相比較對圖像整體進行運算而言,此方法不僅可以節(jié)約運算資源,而且能夠有效地提高算法調(diào)試人員的調(diào)試靈活度。在調(diào)試的過程中能夠得以根據(jù)運算過程中反饋的各個分區(qū)色塊坐標來對不同類型的軌跡進行分類。同時,此方法提出了將機器人處于運動過程中所得出的數(shù)據(jù)結果作為歷史數(shù)據(jù)池,將冗余數(shù)據(jù)進行多次運用,能夠較為有效地解決機器人運動過程中的運算資源利用率問題。圖像處理結果由分區(qū)計算算法給出,運動指令則由當前姿態(tài)數(shù)據(jù)結合歷史數(shù)據(jù)池內(nèi)數(shù)據(jù)加權運算后得出。將不同方法集成在軌跡跟蹤算法中,以實現(xiàn)人形機器人在低速環(huán)境下的自主導航。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
電測與儀表(2015年5期)2015-04-09 11:30:52
機電信息(2014年27期)2014-02-27 15:53:56