中國運載火箭姿態控制技術發展與展望
2023-05-19 13:03:48吳燕生
宇航學報 2023年4期
吳燕生
(中國航天科技集團有限公司,北京 100048)
0 引 言
經過60余年的發展,中國運載火箭實現了從常溫推進到低溫推進、從串聯火箭到捆綁火箭、從一箭單星到一箭多星、從發射衛星到發射載人飛船的多次跨越[1-3]。姿態控制(簡稱姿控)作為運載火箭控制系統的核心功能之一,利用敏感器件測量值、導引量和導航解算結果等,形成控制指令操縱箭體繞心運動,在各種干擾甚至故障條件下保證穩定飛行和指令跟蹤。隨著運載火箭技術的發展,姿控技術也經歷了從無到有、從滿足基本功能要求到追求卓越性能的發展過程。
從東風一號開始到長征二號系列火箭研制成功,中國掌握了以復雜剛性運動-液體推進劑晃動-彈性振動緊耦合為顯著特征的串聯液體火箭姿態控制技術,攻克了以剛晃彈動力學建模技術、彈性體控制技術、擺噴管的推力矢量控制技術為代表的技術難題,實現了液體火箭的姿態控制技術從仿制到自主設計的突破。在以長征五號、長征七號、長征八號等為代表的新一代火箭研制任務牽引下,開展了捆綁助推器推力矢量控制、主動減載、起飛滾轉、在線故障識別與重構、漂移量主動控制、源變量仿真等技術攻關研究,大幅提升了火箭發射的任務適應性、環境適應性和偏差適應性,從控制的角度大幅提升了火箭的性能技術指標。
本文從技術發展的角度系統梳理了中國液體運載火箭姿態控制技術的發展歷程,總結了當前運載火箭姿態控制技術發展面臨的一些問題和挑戰,根據國外運載火箭姿態控制技術的發展趨勢,結合后續中國運載火箭發展的技術需求,對姿態控制技術的未來發展進行展望,提出下一階段運載火箭姿態控制技術發展的重點技術方向。
1 液體運載火箭姿態控制技術特點
姿態控制是火箭控制系統的核心功能之一,需要在線實時感知火箭飛行狀態,計算維持火箭穩定飛行和跟蹤制導所需的控制指令,并驅動執行機構動作產生相應的控制力和力矩,調整箭體姿態,使火箭在滿足載荷、環境等約束條件下,按期望的軌跡和姿態穩定飛行[4]。姿態控制主要包括穩定和跟蹤兩個功能。穩定是保證火箭安全飛行的前提條件,跟蹤則保證了姿態控制系統的性能指標,也是控制系統的最終目標。
姿態控制系統主要由傳感器與測量裝置、姿態控制器、執行機構和箭體動力學模塊四部分組成。控制系統原理框圖如圖1所示。
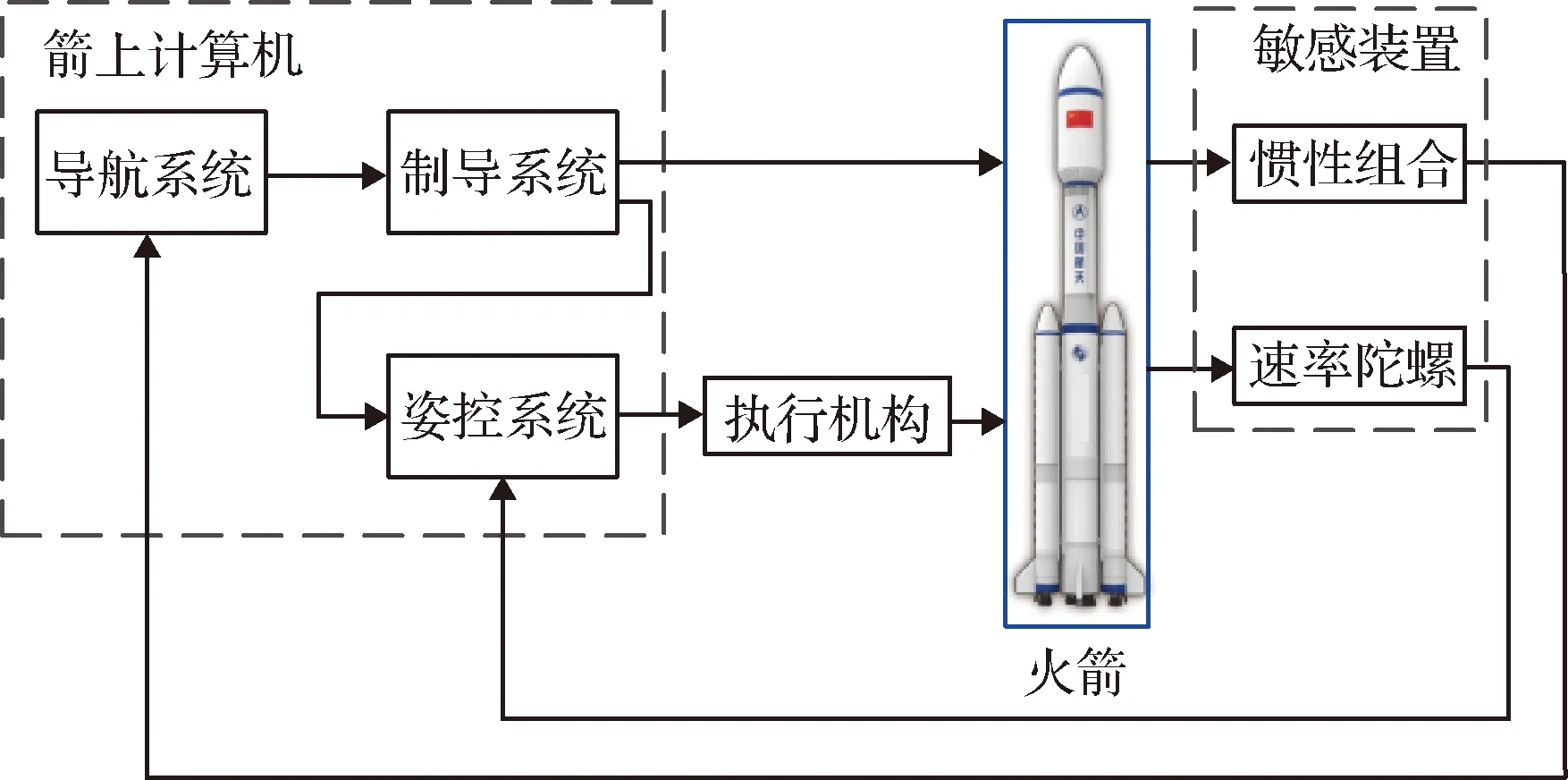
圖1 運載火箭控制系統框圖Fig.1 Block diagram of the launch vehicle control system
液體運載火箭作為被控對象主要有以下特點:
1)運動形式多且耦合嚴重
液體運載火箭動力學方程除了剛體姿態運動外還包含推進劑晃動、箭體彈性振動、發動機噴管擺動、執行機構和慣性器件的局部小回路振動等多種運動形式[5],在姿態控制系統設計時,需確保各種運動形式穩定,且相互之間不發生耦合。
2)動力學模型復雜、階次高
液體運載火箭動力學模型復雜,包含多個貯箱推進劑晃動和彈性振動階次,模型總階次達到了上百階,箭體特性存在多個不穩定零極點,且系統狀態可觀測性不高,很難通過簡單狀態反饋實現系統穩定。
3)特性參數變化劇烈
液體運載火箭推進劑質量占到全箭質量的90%以上,整個飛行過程中箭體質量特性參數變化劇烈,尤其在一級飛行段,質量特性在100多秒內變化超過了70%;飛行速度從靜止歷經亞跨超聲速乃至高超聲速,氣動特性變化明顯,動力學模型參數變化劇烈。
4)飛行環境復雜且存在較大不確定性
運載火箭在整個飛行過程中受到發動機地面噴流、大氣環境、高空風、發動機振動、分離等擾動影響,且存在較大的不確定性,給姿態控制系統設計帶來很大困難。
5)火箭結構剛度低導致低頻特性耦合嚴重
受運載火箭極高的結構效率約束,火箭結構系統大都以強度為指標開展設計,要求控制系統在結構剛度性能要求最低的情況下實現系統的穩定。隨著火箭規模的增大,運載火箭剛度進一步降低,箭體彈性振動和剛體運動耦合越來越嚴重,不斷突破控制系統穩定裕度邊界,給姿態控制系統設計帶來極大的挑戰。
2 中國早期液體運載火箭姿控技術發展回顧
從東風一號開始到長征二號系列火箭研制成功,液體火箭的姿態控制技術取得了從“0”到“1”的突破,掌握了基于復雜剛晃彈模型的串聯液體火箭姿態控制設計技術,為后續中國中大型捆綁液體運載火箭和導彈的研制奠定了堅實的技術基礎。
2.1 動力學建模技術
在動力學建模方面,采用變質量動力學原理建立剛體運動學和動力學方程;采用貝塞爾函數描述貯箱內液體晃動,通過等效單擺模型和質量-彈簧-阻尼器模型建立推進劑晃動動力學方程;采用混合坐標法,將彈性振動位移轉換為用模態坐標表示,將火箭整體彈性變形用兩端自由的空間一維梁模型來模擬,其彈性振動可區分為縱向振動、扭轉振動和橫向彎曲振動,根據梁的彎曲/扭轉理論,分別用兩個四階偏微分方程描述火箭在俯仰和偏航平面內的橫向彎曲振動,用一個二階偏微分方程描述箭體在軸向的扭轉振動,然后通過振型疊加法,分別轉化為用三種廣義坐標表示的二階常微分方程,得到箭體彈性振動方程[6]。
以俯仰通道為例,線性化的小偏差剛晃彈動力學模型為
(1)

第p個貯箱的推進劑晃動方程為
(2)
式中:E1φ,E2和E3為表征晃動運動所受力的動力學系數;Zlp為晃動質心到軸線的距離;ζhp和Ωp為推進劑晃動運動的阻尼比和頻率。
第i階的彈性振動方程為
(3)

敏感器件的測量方程可表示為
(4)
式中:R表示振型斜率;下標gz和stk表示慣組和第k個速率陀螺;sgn表示符號函數。
2.2 姿態控制器設計技術
在姿態控制器設計方面,突破了以彈性體控制為代表的串聯液體運載火箭姿態控制設計技術。DF-2導彈首飛失利使我們認識到彈性對液體火箭控制系統穩定設計的重要影響,此后對彈性體控制技術進行了大量深入的研究,為準確獲取箭體彈性振動特性,開展了全箭模態試驗、發動機搖擺試車、伺服傳遞特性等大型地面試驗,建立了可準確描述全箭彈性振動特性的數學模型,并結合速率陀螺布局優化和校正網絡設計,實現了彈性體的穩定控制。
箭體發生彈性變形后,慣性器件敏感到的箭體姿態除了理論的剛體姿態外還有一部分彈性變形引起的姿態變化,經過控制系統生成控制指令,驅動伺服機構產生發動機擺角。該擺角產生的控制力使火箭作受控運動,進而形成閉環反饋回路,箭體彈性振動與姿態控制回路耦合關系圖如圖2所示[7]。
為抑制箭體彈性振動與剛體姿態穩定回路的耦合,一般是采用速率陀螺安裝位置優化+濾波網絡的控制方案,將速率陀螺安裝在一階彈性振動振型的波腹處,降低進入控制回路的彈性振動信號,再通過濾波網絡對殘余的其它階次彈性信號進行濾波衰減,從而實現彈性體的穩定控制。
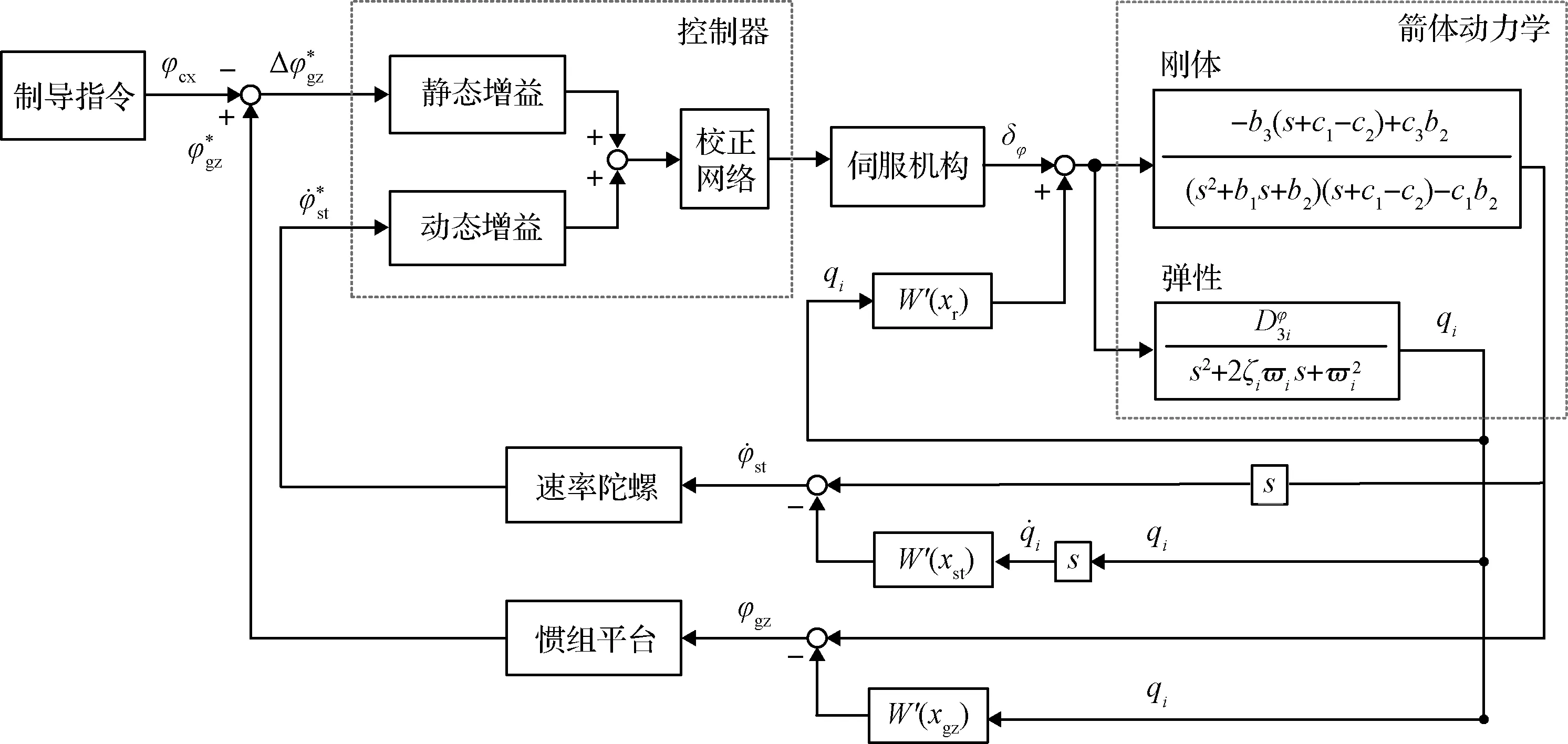
圖2 箭體姿態控制回路與彈性振動耦合關系Fig.2 The coupling of the launch vehicle attitude control loop with elastic vibration
2.3 設計仿真技術
在設計仿真方面,鑒于天地差異性和地面試驗條件限制,火箭模型參數無法在地面準確獲得,通常會取一定偏差范圍來包絡天地不一致性差異,要求姿態控制器設計時要能保證系統在各種偏差包絡下均能穩定。早期火箭型號研制時,都是對關鍵的動力學模型系數進行最嚴酷的極限偏差組合;采用這種上下限極限偏差包絡設計,確保系統對偏差的適應性。
受限于當時計算機性能約束,在開展控制性能評價時,難以開展大規模的全量模型仿真計算,在方案設計階段大都是基于線性小偏差方程開展的。根據外界擾動變化特性和控制系統響應特性,對原有積分動力學方程求解過程在一定假設條件下進行合理的簡化,推導出系統積分狀態量的靜態計算公式,大幅提高了設計仿真效率。此外,采用統計風場設計,基于實測統計出來的條件風數據,采用統計學方法將高空風特性分為平穩風和切變風,采用一條統計風場實現對若干條實測風場的包絡設計,大幅降低了仿真計算工況需求。經仿真驗證,靜態計算與動態仿真結果基本一致,確保了計算結果的合理性,該方法有效支撐了中國早期運載火箭研制發展。
1.1 對象 來源于中國疾控中心青年科研基金課題“我國6~13歲學齡兒童主要慢性病干預模式及適宜技術研究”的數據。
3 新一代火箭姿控技術進展
在新一代運載火箭研制過程中,開展了以起飛滾轉、漂移量主動控制、主動減載、擺助推控制技術、源變量仿真技術等為代表的技術攻關研究,大幅提升了火箭發射的任務適應性、環境適應性和偏差適應性,從控制的角度大幅提升了火箭的性能技術指標。
3.1 動力學建模技術
新一代液體運載火箭相比長征三號甲、長征二號F等傳統火箭型號,在控制方式、控制對象、控制執行元件三方面都有明顯的變化:1)助推發動機搖擺參與控制,2)整體模態呈空間分布,3)助推器局部模態具有低頻、密集的特點;傳統的姿態動力學模型與控制回路均不能體現這些特點[8]。
在理論與設計方面,建立了全新的基于空間模態的新一代火箭姿態動力學模型并予以驗證,制定了聯合搖擺的控制力分配方案,開展了箭體動力學與控制耦合關系分析,完成了擺助推姿態控制的穩定性驗證[9]。在試驗與仿真方面,采用理論計算與試驗結合的手段測試獲取姿態動力學模型參數[10],包括風洞試驗、全箭模態試驗[11]、貯箱晃動試驗、儀器艙角振動試驗、伺服機構動靜態特性測試及慣性器件支架振動試驗、控制半實物仿真試驗等,保證了擺助推控制回路穩定設計的正確性,在新一代液體運載火箭中獲得廣泛應用,并通過了多次飛行試驗的考核。
此外,建立了“發動機-伺服”小回路與“發動機-伺服-結構-控制”閉環耦合動力學模型,通過負載力矩反饋環節體現全箭和發動機-伺服系統動力學耦合關系。從控制品質的角度出發對發動機-伺服系統的頻率提出限制,采用穩定性分析方法,獲取全箭與“發動機-伺服”小回路之間耦合失穩邊界,并通過仿真驗證該邊界的真實性;同時改進了地面數學仿真模型,并首次使用帶變加載功能的半實物仿真試驗系統驗證設計,實現發動機偏心力矩和發動機負載力矩反饋環節對飛行姿態影響的精確分析[12]。
3.2 姿態控制器設計技術
新一代運載火箭一般要求控制器具備載荷主動控制、干擾主動補償、全方位起飛滾轉、全向調姿等新功能,對火箭控制系統的任務適應性、環境適應性和偏差適應性提出了更高的要求。針對不同的運載火箭,根據任務需要采取了不同的控制措施,提升控制系統的品質和任務適應性。采用加速度計等效代替攻角表功能,實現了飛行氣動載荷的主動控制,通過引入預置擺角前饋控制措施消除了機架變形干擾的影響;通過引入干擾觀測器估計干擾進行補償,提升了控制系統對偏差的適應性;采用漂移量主動控制技術,大幅提升了火箭起飛安全性;采取自適應參數調節算法提高姿控系統對偏差的適應能力,應用多姿態角速度加權反饋控制實現彈性相位穩定。上述技術大大提升了運載火箭飛行安全性與任務適應性,促使中國火箭姿態控制技術從傳統的滿足功能要求的自動控制向高魯棒性、高適應性的先進控制轉變。
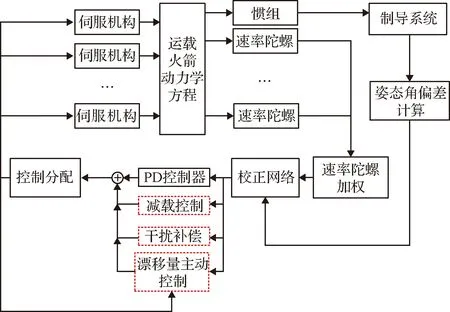
圖3 新一代運載火箭控制系統框圖Fig.3 Block diagram of control system for the new-generation launch vehicle
1)主動減載控制技術
主動減載的基本原理是通過在姿態控制回路中增加一路信號反饋,在傳感器敏感到風作用時調整箭體姿態,減小載荷攻角[13]。主動載荷控制技術包括基于攻角表和基于加速度計兩種形式,攻角傳感器可以用來直接測量火箭飛行過程中的合成攻角,是載荷控制的最有效方法。但受限于測量精度以及安裝和使用問題,攻角傳感器在運載火箭上還沒有參與實時控制,目前采用較多的是利用固連在箭體上的加表來獲得測量信息,用來估算攻角,從而參與減載控制。
2)起飛漂移量主動控制技術
影響起飛漂移量的因素主要包括地面淺層風干擾和發動機推力方向偏差,漂移量主動控制是通過改變發動機推力方向,克服火箭朝向發射塔的橫向干擾力,確保火箭與塔架之間的凈空間安全。主動控制方案主要包括開環控制和閉環控制兩種,開環控制的基本方案為主動施加遠離發射塔架方向的調姿程序角,將發動機推力方向調整為遠離發射塔架的方向,增大火箭與塔架的凈空間。閉環控制是通過在線實時測量發射系橫向加速度、速度和位置或推力矢量方向,并對其施加控制,從而實現火箭起飛漂移量的主動控制[15]。主動施加程序角的開環控制方案具有簡單可靠的優勢,已經在中國新一代載人火箭研制中得到應用。此外,在姿控閉環回路中引入過載反饋或推力線矢量控制的方式也已完成理論推導與仿真驗證,未來有望在型號中獲得廣泛應用。
3)干擾補償技術
運載火箭的控制器一般是采用比例-微分(PD)控制,考慮到積分具有較大的相位滯后,且存在積分飽和問題,在火箭控制器設計時一般不會使用積分環節,這也導致控制存在一定的靜差。在起飛段和大風區飛行段,系統對狀態量偏差的適應能力是有限的,如受結構強度約束,箭體在大風區只能容忍5°~6°的飛行攻角,因此在一些狀態量約束較苛刻的飛行段需要對干擾進行主動補償,提升控制系統的性能品質。
在長征八號火箭控制系統設計時,為提高減載控制效果,在傳統基于加速度計減載控制基礎上,利用擴張狀態觀測器對飛行中除發動機控制力矩外的干擾力矩進行估計并實時補償,通過該方法進一步提高載荷的控制效果,如圖4所示。
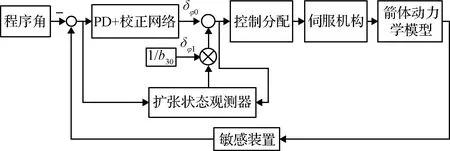
圖4 基于擴張狀態觀測器的補償控制方案Fig.4 Compensation control scheme based on the extended state observer
3.3 設計仿真技術
數字化仿真技術在型號研制中扮演的角色越來越重要,目前仿真技術已貫穿于火箭控制系統的全壽命周期,是火箭控制系統論證、研制、試驗、結果分析不可缺少的手段。以源變量建模及仿真技術、基于飛行數據的參數辨識技術等為代表的設計仿真技術已取得突破性進展,在數學仿真預示、設計效率提升、精細化設計等方面取得較大進展,已廣泛應用于型號工作。
1)基于源變量的建模與仿真技術
傳統小回路設計中,總體、彈道、制導、姿控、動力和載荷等專業分別采用不同的數學模型,獨立考慮各關鍵參數偏差,而未考慮參數之間的關聯性,各參數偏差對系統的影響通過干擾項來體現。這樣就造成各參數在數據傳遞過程中偏差被各專業層層放大,導致總體方案設計過于保守。源變量仿真建模中的數據流圖如圖5所示,以發動機安裝角、方位角、擺角、推進劑秒耗量、加注量、全箭分布質量等參數為基本變量(即源變量),通過在線計算推進劑流量及剩余量,全箭質量特性(質量、質心、轉動慣量),發動機推力及推進劑晃動特性,結構彈性振動及載荷分布,實時迭代全箭質心、姿態、推進劑晃動及彈性振動響應,實現總體多專業的參數集成建模,從而實現運載火箭動力學一體化仿真。
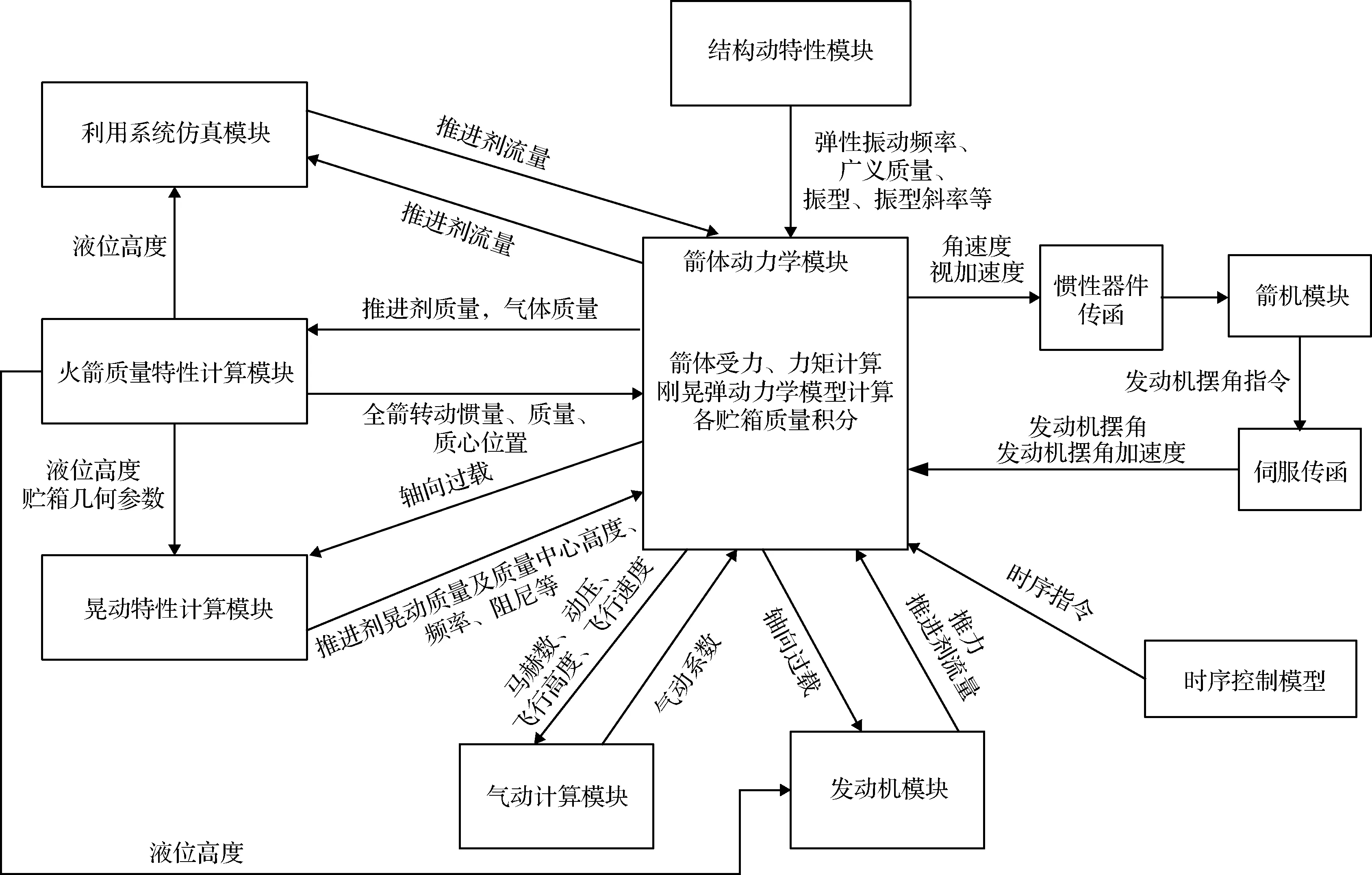
圖5 液體運載火箭數據流圖Fig.5 Data flow diagram of liquid-propellant launch vehicles
源變量仿真在故障定位、干擾辨識、飛行安全性評估等方面發揮了重要的作用,提高了系統設計的風險辨識和防范能力,提升了總體精細化設計能力,取得了良好的效果,目前已經在型號研制中得到了全面推廣應用。
2)基于飛行數據的參數辨識技術
偏差數據的合理性是影響姿控設計方案和計算結果可信度的關鍵因素之一,目前大量產品仍然缺少有效的偏差評估手段,限制了基于偏差的精細化設計水平。新一代運載火箭研制過程中,針對利用飛行數據和動力學仿真對飛行過程中產品結構偏差、氣動參數、發動機參數的辨識技術開展了一些探索研究,完成了減載效果精確評估、飛行載荷qα評估、真空飛行段結構干擾評估等專題研究工作,如圖6所示。
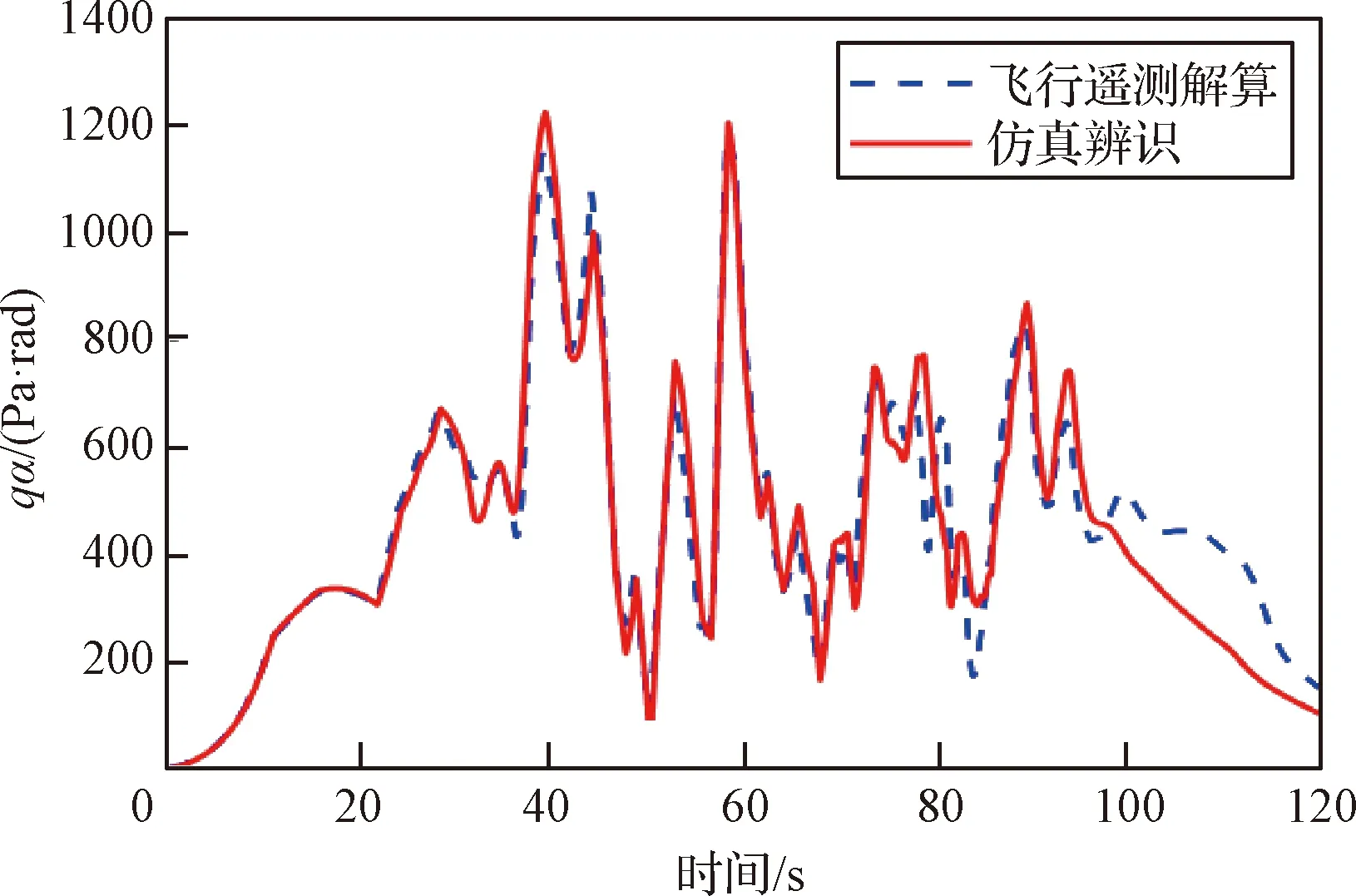
圖6 qα飛行遙測與仿真辨識比對Fig.6 Comparison of values of qα from telemetry data and identification
圍繞天地差異性、偏差和干擾等的參數辨識與回歸設計,是液體運載火箭精細化設計中值得長期深入研究的問題。一方面可利用現役火箭真實飛行數據開展大量統計分析與參數辨識,摸清現役火箭的系統偏差,降低參數設計的保守性;另一方面可為未來火箭實現精細化設計提供數據支撐,進而“反哺”設計方法,修訂設計輸入。根據飛行數據對影響火箭關鍵性能的偏差數據閉環確認,可有效降低設計的保守性,為未來火箭設計提供有益的參考。
4 未來技術展望
下一代液體運載火箭的研制已經開始,載人登月火箭的可靠性和安全性要求高,重復使用運載火箭飛行剖面復雜,重型火箭低頻模態更加密集、耦合更為嚴重,以及航天運輸系統航班化發展,要求火箭具有高適應性、高可靠性的姿控系統,應對發動機故障、飛行干擾和參數偏差具有強自適應能力,具備在線誤差干擾辨識與補償功能。此外,隨著人工智能技術的飛速發展,使其應用于運載火箭控制系統設計逐漸成為可能,國外已經開始有人將智能算法應用于運載火箭中,其發展勢頭非常迅猛,具備自修復能力的智能化姿控系統將是未來火箭發展的趨勢。
4.1 可重構性設計與評價技術
可重構性設計是從頂層提升火箭故障適應性的方法,也是最有效的方法。對故障進行自主處理的前提是火箭具有可以重構的能力,即可重構性。其大小取決于系統的構型設計,以擺噴管為例,當發動機布局方式、安裝角、搖擺方案、最大擺角范圍等參數確定后,整個系統的故障適應性就已經確定了,因此面向故障的設計需要在設計之初就對可能出現的故障加以考慮,在保障完成主任務的同時,通過對執行機構布局、配置的合理優化,使得系統在預設故障情況下具有良好的重構能力,為控制重構提供基礎。以“半人馬座”通用末級為例,其使用了4組一共8臺姿控噴管,如圖7所示,具備任意1臺噴管或指定至多4臺噴管故障下的正常飛行能力。通過開展可重構的構型設計,將典型的故障模式在設計之初就予以考慮。該工作有助于火箭設計水平提升,從頂層保證了運載火箭對故障適應的可能性,為后續重構控制提供基礎。
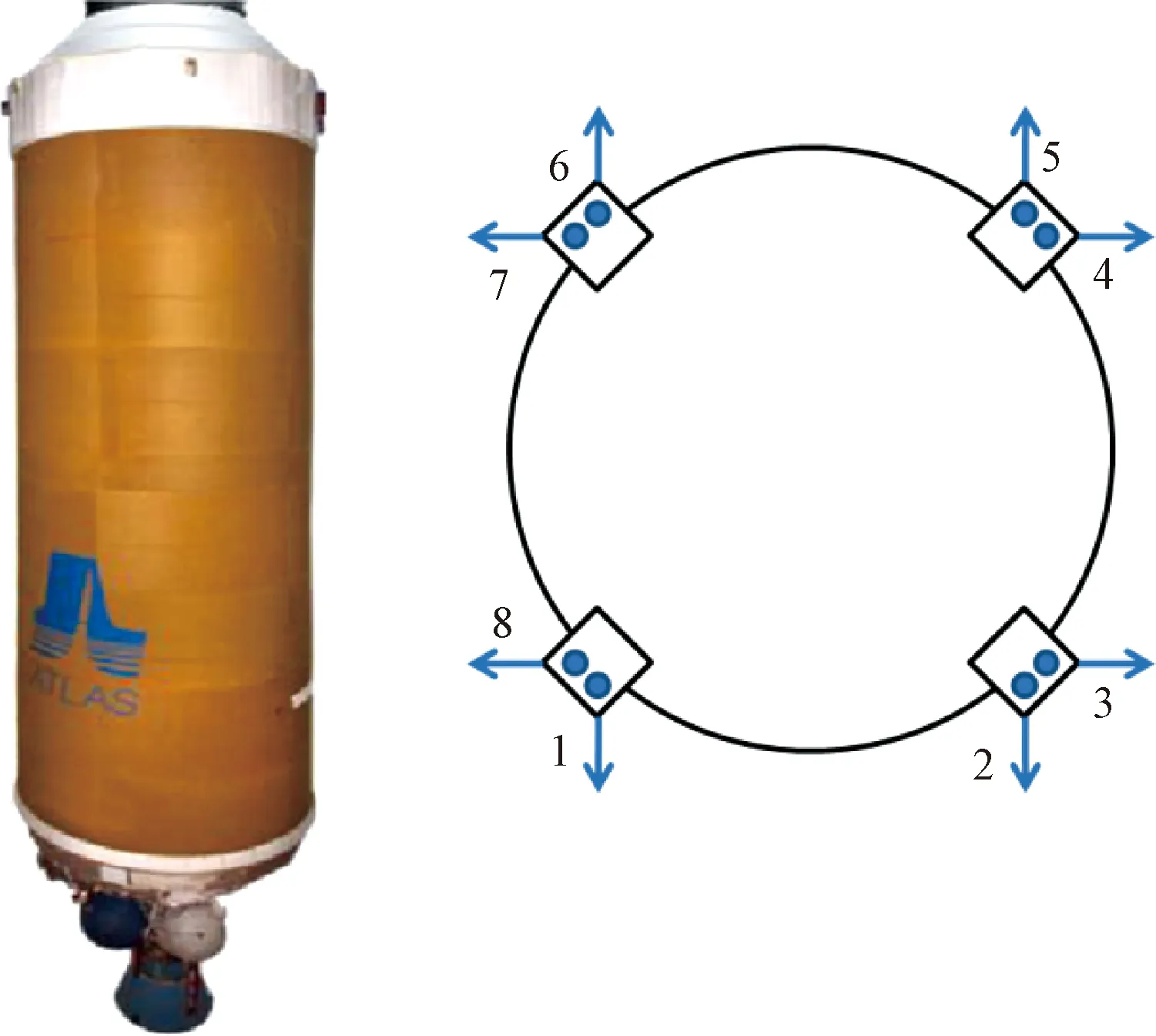
圖7 “半人馬座”上面級結構及姿控噴管布局Fig.7 Upper stage structure and nozzle layout of the Centaur
開展控制可重構性研究是后續控制系統重構的基礎,主要包括兩部分研究內容:
1)可重構性評價
受火箭結構和成本約束,火箭擺動發動機數量有限且執行機構行程范圍限制,火箭的控制能力是有限的[16]。如何精確評估故障后的剩余控制能力和故障后執行后續任務所需的控制能力、故障后在外界擾動作用下系統各狀態量的最大可達范圍,建立故障后控制可重構性評價指標是深入定量分析火箭控制可重構性的首要問題。
2)可重構性設計
為了設計一款具有控制可重構性的火箭,需要針對運載火箭開展控制可重構性分析;并在此基礎上,通過作動器布局優化,提高火箭在正常狀況和典型故障情況下的控制能力。從而使得火箭在典型的故障情況下,具有更強的姿態控制能力,能夠適應更大程度的故障干擾,從而更有效地容忍故障,提高火箭的成功率。
4.2 容錯控制技術
控制系統的重構是從控制策略上提升故障適應性的具體方法,含控制策略、控制律和控制參數的重構。對于具有重構能力的火箭,當系統發生故障后,控制系統應當具備一種或多種重構方式使得火箭可以恢復正常飛行。其中,控制策略的重構是指火箭當前的控制策略(諸如三通道解耦控制、完全驅動或過驅動控制等)受故障影響不能實施時,可以采用其他控制策略(如滾轉控制、欠驅動控制等)完成姿態穩定或指令跟蹤。控制律和控制參數的重構指控制系統在故障情況下通過控制律或控制參數的重新配置,補償故障帶來的影響,恢復系統的控制能力。開展控制系統重構研究,是發生故障后立即干預,挽救飛行任務的直接手段,該工作的成效直接關系到故障后火箭能否及時恢復姿態控制。
目前,重構控制技術領域仍需要解決以下問題:
1)多故障問題。目前故障重構控制的設計,一般都是基于單個故障展開研究,而實際系統中常有可能多故障并發。這是由于某個單一故障的起因常常也會導致其相關系統的一系列故障,由此,有必要開展多故障問題的研究。
2)實時性問題。由于火箭這一被控對象呈高動態特性,參數變化快,對控制律重構方法實時性要求很高。很多重構控制先基于參數辨識或故障檢測,再通過優化算法給出重構控制律,任務串行且計算量大,造成控制存在較大延遲,從而降低系統控制品質甚至無法挽救飛行任務。
3)非線性問題和耦合問題。結構損傷或執行器故障后的火箭,其本身動力學或控制系統可能會呈高度非線性或耦合性,原本線性解耦的控制策略不再適用,從而給控制系統的重構造成巨大的困難。該類故障在實際飛行中很常見,比如運載火箭雙機雙擺中單臺發動機故障,但對這類問題的研究還很不充分。
未來重構控制將向智能化、綜合化方向發展,智能控制方法與傳統控制方法相結合所形成的飛行重構控制方法,比如神經網絡自適應控制方法[17]。其控制結構與線性系統完全相同,只是被控對象的辨識模型為任意神經網絡,從而使得此控制方法借助于神經網絡自適應控制推廣到非線性系統。另外,隨著智能控制理論本身的發展,其交叉衍生出的各種控制方法,也逐漸應用于可重構姿控系統的研究中,比如模糊神經網絡在姿控系統重構中的應用。但是也應看到智能控制理論本身所具有的一些制約因素,比如穩定性等問題,這將是在重構控制系統設計方面需要考慮并加以解決的問題。
4.3 強魯棒自適應控制技術
航天控制系統面臨著飛行環境復雜、內外部干擾、動力學模型存在偏差及飛行任務剖面快速時變等諸多挑戰,魯棒最優控制、非線性自適應控制、干擾觀測器估計與補償、多模型切換控制等方法在航空航天工程中得到了充分研究[18-20],具有廣泛的應用前景。文獻[21]提出了航天智能控制系統的概念,有望成為系統性、綜合性解決上述問題的可行途徑,通過智能技術的賦能,可使航天裝備變得更智慧,主要技術指標得到顯著提升,或具備以往所不具備的能力;并能通過學習和訓練,使能力得到持續提升,從而適應來自本體、環境和目標的不確定性,完成復雜的任務。
隨著火箭規模的增加,火箭結構模態更加復雜,一方面難以通過地面試驗全面準確地對理論建模結果進行確認;另一方面,火箭自身產品偏差尤其是故障狀態下火箭的結構動力學特性將發生變化,僅通過地面預先設計的方式難以覆蓋飛行中面臨的真實工況,基于飛行模態辨識的自適應控制技術是解決這一問題的有效措施。未來重型液體運載火箭靜不穩定度大,結構局部彈性振動、彈性振動與推進劑耦合對控制穩定能力及穩定品質形成極大壓力,尤其是重型火箭結構振動頻率進一步下降使箭體剛、晃、彈運動頻域特性耦合嚴重。為解決大靜不穩定細長箭體姿控系統穩定性設計和彈性運動建模不確定性問題,使設計參數盡可能適應更大范圍彈性偏差,采用彈性信息在線辨識、自適應陷波、多速率陀螺自適應加權、自適應增廣控制等技術,通過對姿態控制回路中彈性信號的在線提取,自適應調節姿態通道的增益系數、網絡參數,提高控制系統對模型不確定與外界環境干擾的適應能力,突破大型火箭長細比設計約束。
4.4 一體化再入控制技術
再入段姿態控制面臨參數不確定性大、過程約束多、通道間氣動參數交聯復雜、制導姿控耦合嚴重等問題,對控制系統提出了更高的要求,需緊密結合各飛行段的飛行環境、執行機構等特性,并考慮氣流參數偏差、導航誤差、箭體結構偏差、發動機推力偏差等偏差因素以及制導控制算法的工程可實踐性,在滿足動壓、熱流、過載、燃料、著陸位置、速度約束等條件下,針對給定工況開展高精度強抗擾制導姿控技術、著陸段多執行機構高精度復合控制技術、氣動減速段強魯棒多約束控制技術以及其余各飛行段高精度制導指令跟蹤技術等研究。
4.5 多源信息混合仿真技術
傳統仿真大都是基于物理特性模型開展的,如采用飛行力學原理建立火箭的姿態動力學仿真模型、采用結構動力學建立火箭結構彈性振動仿真模型,對于一些結構連接形式復雜、非線性環節多的部件特性,很難用準確的數學方程進行描述,需要通過一些地面試驗獲取其對應的模型特性,提高仿真模型的真實性,如在火箭研制階段開展的模態試驗、伺服傳遞特性試驗、慣組角振動試驗等。隨著火箭規模的增大,系統試驗的成本和代價太大,傳統基于試驗的建模仿真手段越來越難以開展,需要探索基于物理特性信息和部分系統或子系統地面試驗信息的混合建模仿真技術,以虛實結合的方式進行仿真試驗驗證,有效降低試驗成本。
為了降低模態試驗對場地等基礎條件建設的要求,未來的大型運載火箭需要采用創新型的子結構模態試驗方法來驗證全箭模態,需要具備強大的理論計算、設計方法和仿真試驗的基礎能力。子結構模態試驗通過化整為零,將全箭劃分成為若干子結構進行試驗,再通過試驗與仿真手段相結合的方式,驗證全箭結構動特性模型,既降低試驗規模,減少經費、產品和時間等資源開銷,又可以獲得充足的試驗數據支撐姿控穩定設計。
5 結 論
本文總結了中國運載火箭姿態控制技術的發展歷程,并針對下一代液體運載火箭技術發展,以及低軌星座、載人月球探測等任務需求,明確了可重構性設計與評價技術、容錯控制技術、強魯棒自適應技術、一體化再入控制技術和多源信息混合仿真技術等未來姿控系統的發展方向。液體運載火箭姿控技術的持續突破,映射出近年來中國航天技術的不斷進步,其得益于中國航天領域堅持自力更生的優良傳統。中國航天任重道遠,仍需持續推動中國下一代運載火箭的技術進步。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
天天愛科學(2020年6期)2020-09-10 07:22:44
汽車維修與保養(2019年7期)2020-01-06 03:30:42
藝術啟蒙(2018年7期)2018-08-23 09:14:18
數學物理學報(2017年6期)2018-01-22 02:26:40
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維護與修理(2015年2期)2015-02-28 12:15:39