基于遺傳算法的工業機器人時間最優軌跡規劃及仿真研究
2023-05-30 10:48:04岳鵬飛
時代汽車 2023年1期
岳鵬飛
摘 要:“中國制造2025”戰略的提出,給工業自動化的發展與應用帶來了更加廣闊的空間。工業機器人作為智能化工業生產的重要組成部分之一,其作業質量與工作效率,直接影響到我國工業現代化的實現速度。本文以工業機器人的軌跡規劃作為研究方向,首先概述了工業機器人技術發展狀況和應用前景;然后詳細分析了遺傳算法的工作原理與工業機器人軌跡規劃時間最優問題;并以PUMA560工業機器人作為課題的研究對象,通過數學遺傳算法函數規劃的方式,探究工業機器人時間軌跡規劃的最優計算方法;最后利用MATLAB實現程序代碼編程、優化與仿真,建立規范化的最優軌跡方案。仿真結果證明,PUMA560工業機器人能夠在特定遺傳算法下高效完成工業制造任務。
關鍵詞:遺傳算法 函數 軌跡優化 PUMA560
1 引言
在科學技術的迅猛發展進程中,人工智能與自動化機械技術為工業機器人提供了越來越完善的自動化操作功能,也為社會生產與工業發展帶來了越來越廣泛的智能化與機械化技術支持[1]。當今時代的工業機器人,在人類的現實生產與生活中,占據了舉足輕重的應用地位,其工作效率與工作質量的提高,將會給人類的工業生產帶來更大的助益。與此同時,工業機器人在驟起驟停的實踐化工作過程中,機械臂會出現一定的抖動現象。如果機械臂的抖動過于明顯,則會直接影響到工業機器人的軌跡精度[2]。所以,通過遺傳算法的技術手段,實時規劃跟蹤工業機器人的相應軌跡,實現機械臂各個節點的平穩、平滑運行,不僅能夠促進工業機器人的智能化發展,還能夠提高工業機器人的運作穩定性。從實用的角度來說,以時間最優為目標的工業機器人軌跡規劃研究,對工業機器人技術的實踐化應用,有著十分重要的指導性意義。
2 工業機器人技術的發展狀況和應用前景
2.1 工業機器人的技術發展狀況
從歷史的角度來說,工業機器人的發展,最早起源于1954年。當時,美國工程師喬治·德沃爾以程序設計的方式,研制出世界上第一臺工業機器人[3]。到了20世紀80 年代時期,信息技術為工業生產提供了高度的自動化與集成化,也為工業機器人帶來了人工智能與機械化發展。經歷了半個多世紀的發展,如今的工業機器人應用較為廣泛,其應用領域已經拓展到世界各個行業,如:建筑、采礦、農業、勘探、國防、軍事等等領域中,都能夠看到工業機器人忙碌的身影。工業機器人技術的發展,在人類物質文明與精神生活方面,發揮了重要的影響與作用。
2.2 工業機器人技術的應用前景
工業機器人是伴隨電氣時代的進步而產生的,在信息技術與遺傳學算法的不斷完善過程中,工業機器人技術得到了不斷地得到了不斷的創新與改善[5]。從工業機器人的應用前景來看,PC技術促進了集成電路的發展速度,工業機器人的控制系統也隨之向軟、硬資源融合方向進步。標準化和網絡化的PC技術,能夠滿足工業機器人的發展步伐,并能夠促使工業機器人朝著開放式系統方向發展。工業機器人的溫度、濕度等技術控制,需要依靠傳感器來實現。因此,硬件傳感器技術的嵌入式應用,是工業機器人未來發展的一大主要應用方向。與此同時,工業機器人的智能程度在AI技術的支持下,朝著更深入的邏輯分析、推理判斷與數據規劃方向發展,在不遠的未來,匯集智能化、網絡化與模塊化特點的智能工業機器人,將會具有更加遼闊的應用空間與應用前景。而采用智能遺傳算法,能夠提高工業機器人的環境適應度,是保障工業機器人順利完成質作業任務的最佳措施之一。
3 工業機器人的軌跡規劃時間最優問題
3.1 遺傳算法的工作原理
遺傳算法(Genetic Algorithm)是人工智能技術中一項重要的循環計算尋優算法。從工業機器人的時間軌跡規劃角度來看,它模仿人類的生物進化過程,以數學建模的算法求解方式,求得工業機器人所有可能的運動軌跡,并搜索運動軌跡的求解方案,從而找到最優時間軌跡。因此,基于遺傳算法的工業機器人時間軌跡規劃算法,具有應用方便、智能求解和魯棒性較強等優點。
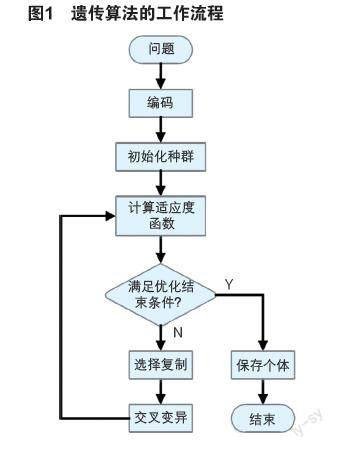
從算法的求解方法上來看,遺傳算法是利用遺傳算子,通過對子代種群的算法進行求解,從而獲得更加有效的問題最優解。因此,對遺傳算法的工作原理分析,是實現工業機器人軌跡規劃時間求解的最佳求解方案。本課題中的遺傳算法的求解方案為:從對PUMA560工業機器人軌跡規劃問題的分析開始,首先針對不同關節點的軌跡時間規劃問題進行遺傳算法編碼,然后對其子種群進行初始化,并設置基于人工智能的自適應函數。當自適應函數滿足優化條件時,子代種群變異并繼續遺傳算法,求解到最優軌跡規劃時間后,保存該最優數據。具體的工作流程如圖1所示。
3.2 基于時間最優角度的工業機器人軌跡規劃
3.2.1 約束條件規劃
工業機器人的運動軌跡以特定的機器人運動關鍵節點為基礎,為關鍵點(q)定義笛卡爾空間坐標,并把關鍵點對應的時間序列定義為t,設h是兩個時間節點的時間間隔,則:
hi=ti+1-ti
T(hi)=h1+h2+…+hm-1=hi
這里的T(hi)指的是工業機器人從始點到終點的運行時間總和,而工業機器人再運動過程中,需要在各個關鍵節點處做到時間上的同步。所以,讓機器人達到最優時間規劃,就需要機器人的各個關節能夠同步,如此才能降低軌跡復雜所帶來的運動能量消耗。
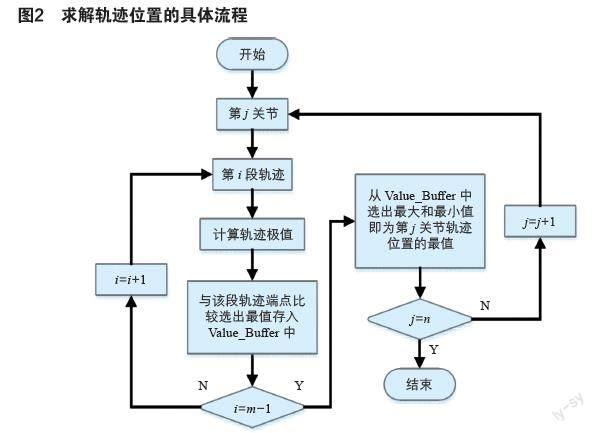
因此,需要對工業機器人的各個關節進行運動學約束。為了能夠給工業機器人的各個關鍵運動軌跡帶來方便,需要以關節約束的方式,描述關節位置的上、下限;根據關節最大速度求得關節的最大加速度絕對值;根據關節最大加速度求解工業機器人關節的最大二階速度絕對值。因此,求解機器人關節點對應的軌跡位置時,需要對第j個關節節點的第i段軌跡極限值進行計算,并與該段軌跡端點比較,獲得最大和最小極限值,存入value_Buffer數組中,在經過遺傳算法的循環計算后,獲得第j關節節點的軌跡位置最大和最小值。求解軌跡位置的具體流程,如圖2所示。
3.3 求解軌跡函數最優解
在求解工業機器人運行軌跡的過程中,根據軌跡運行函數能夠求解不同軌跡函數的最值,并根據復雜軌跡函數采用極值軌跡求解法確定軌跡函數的最值。借助Matlab求解軌跡函數的求解過程如下:
3.3.1 函數極值點軌跡求解
由于軌跡的求解函數屬于人工智能范疇內,其數學函數的定義屬于高階多項式,使用Matlab解析solve()函數,能夠獲得應用位置的極限值。
3.3.2 函數極值點軌跡速度求解
工業機器人的軌跡運行速度函數也屬于高階多項式,所以在對其進行Matlab求解時,利用三根表達式來求得軌跡速度函數的極限值表達式(三個極值點)。
3.3.3 函數極值點軌跡加速度求解
建立工業機器人的節臂運動軌跡二階函數,即:拋物線函數,求得極值點對應的函數頂點表達式。在確定關節點函數極值前,對相關的極值點進行校驗,并帶入軌跡函數極值中。
3.4 遺傳算法求解軌跡函數關鍵源代碼
3.4.1 變量初始化源代碼
在使用種族遺傳算法進行最優軌跡優化時,首先需要對工業機器人的種群規模和變異概率進行設置,其對應的代數設置數據為:
(1)進化代數設置:M=50;N=20;
(2)種群規模設置:Pm=0.3;
(3)變異概率設置:LC1=zeros(1,M);LC2=zeros(1,M);Yp=L1。
3.4.2 種群數據初始值設定
基于遺傳算法的工業機器人各關節初始種群數據通過隨機算法生成,其對應的源代碼為:
X1=XY(R,1);Y1=XY(R,2);X2=XY(R,3);Y2=XY(R,4);
for i=1:N
farm{i}=rand(1,aaa);
End
3.4.3 雙親雙子單點交叉遺傳算法
在遺傳算法的進化迭代過程中,需要設置迭代計數器counter=0,并為循環設置停止條件為達到最大迭代次數,即:while counter newfarm=cell(1,2*N);%用于存儲子代的細胞結構 Ser=randperm(N);%兩兩隨機配對的配對表 A=farm{Ser(1)};%取出父代A B=farm{Ser(2)};%取出父代B P0=unidrnd(aaa-1);%隨機選擇交叉點 a=[A(:,1:P0),B(:,(P0+1):end)];%產生子代a b=[B(:,1:P0),A(:,(P0+1):end)];%產生子代b newfarm{2*N-1}=a;%加入子代種群 newfarm{2*N}=b; for i=1:(N-1) A=farm{Ser(i)}; B=farm{Ser(i+1)}; newfarm{2*i}=b; end FARM=[farm,newfarm]。 4 時間最優軌跡規劃仿真 為了能夠確定本課題編碼的遺傳算法有效性,采用Matlab仿真實現遺傳算法結果的數據分析,并通過仿真獲得的數據值,計算工業機器人軌跡關鍵節點的最優軌跡信息。其中,把PUMA560工業機器人的關節關鍵起始點的速度設置為0,終止點的速度也設置為0,為其配置加速度為1,填寫初始數據后展開工業機器人的時間最優軌跡規劃仿真。具體的遺傳算法仿真過程為: (1)設定工業機器人的所有關節運動學約束條件,并編寫種群自適應函數源代碼,優化該源代碼的編寫語句,達到時間最優。 (2)通過Matlab中提供的遺傳算法,在定義的種群函數中設置指定的個體上下限,其它相關參數與變量采用默認設置值,展開時間最優軌跡的計算。 (3)優化軌跡計算過程,獲得各段軌跡的最終時間優化仿真結果。 通過對優化結果的計算與仿真曲線數據值,能夠計算出基于遺傳算法的工業機器人時間最優軌跡規劃的仿真結果,如表1所示: 從仿真的結果可以看出,三個關節點所對應的軌跡運行時間差較小,為了能夠讓各個關節點位置在時間上基本同步,需要針對時間軌跡選擇最優關節點位置,從而保障各個關鍵節點之間的同步性。因此,調整關節節點位置,使得最終的仿真結果總時間和在時間上基本同步,如表2所示: 此時,三個關節節點走完時間最優軌跡所需要的時間,比遺傳算法優化后的軌跡規劃時間,在總時間方面有所減少,且呈現出更加良好的同步結果。仿真結果證明,改進后的遺傳學算法在時間規劃方面,實現了工業機器人的軌跡優化,能夠讓工業機器人的各個關節點在時間軌跡上基本同步。 5 結語 在工業機器人的機械化生產與應用過程中,時間效率與工作質量是評價其自身性能優劣的重要指標。本文以PUMA560工業機器人的時間軌跡規劃作為研究對象,利用遺傳算法對工業機器人各關節節點的運行時間進行優化,并在設定約束條件的基礎上,以時間最優為目標,展開Matlab軌跡規劃編碼及仿真。仿真結果證明,優化算法的時間軌跡具有更加良好的規劃性與可靠性。 參考文獻: [1]殷鳳健,梁慶華,程旭,陶志遠.基于時間最優的機械臂關節空間軌跡規劃算法[J].機械設計與研究,2017,33(05):12-15. [2]張舒曼.六自由度工業機器人軌跡規劃研究及仿真[D].杭州電子科技大學,2015. [3]秦律,汪木蘭,朱曉春,王保升.基于改進遺傳算法的機器人時間最優軌跡規劃[J].機械設計與制造工程,2018,47(11):63-67.
