曲線導軌上高速磁浮列車運動穩定性
2023-05-30 11:45:49余志武黎燕霞徐磊馬建趙淼
華東交通大學學報 2023年1期
余志武 黎燕霞 徐磊 馬建 趙淼
摘要:研究了高速磁浮列車在定常氣動荷載作用下曲線上的運動穩定性。建立了考慮氣動荷載影響的高速磁浮車在曲線導軌上的動力學模型,經過特征值分析提出了磁浮車的臨界速度概念,分析了臨界狀態時車速、控制參數、氣動系數對高速磁浮車曲線導軌上的臨界速度影響。結果表明:當系統達到臨界狀態時,它有兩個臨界速度。在臨界狀態條件,位移控制參數由20 000 kN/m降為2 000 kN/m,氣動系數從0.05降為0.01,第一類臨界速度變大。第一個臨界速度出現特征值的實部為零而虛部不為零,第二個臨界速度出現在特征值的實部和虛部都為零。失穩是由于偏離平衡位置引起的,位置由曲線導軌特征和側風荷載產生。氣動升力和向心的風荷載會提高穩定性;氣動降力和離心的風荷載會降低穩定性;水平角可與向心力配合,豎直角允許設置的范圍小。
關鍵詞:高速磁浮列車;臨界速度;特征值;氣動效應;運動穩定性
中圖分類號:U237 文獻標志碼:A
本文引用格式:余志武,黎燕霞,徐磊,等. 曲線導軌上高速磁浮列車運動穩定性[J]. 華東交通大學學報,2023,40(1):25-33.
Motion Stability of High-Speed Maglev Train on Curved Track
Yu Zhiwu1,2,Li Yanxia1,2,Xu Lei1,2,Ma Jian3,Zhao Miao3
(1. School of Civil Engineering, Central South University, Changsha 410075, China; 2. National Engineering Research Center of
High-speed Railway Construction, Central South University, Changsha 410075, China; 3. Guangzhou Sifang Bond Industrial Co.,Ltd., Guangzhou 510700, China)
Abstract:Motion stability of the high-speed maglev vehicle under steady aerodynamic load was studied. The dynamic model of the high-speed maglev vehicle on the curved guideway considering influence of aerodynamic loads was established. The critical speed concept of the maglev vehicle considering aerodynamic loads′ effect based on eigenvalues was presented. Vehicle speed, control parameters, and aerodynamic coefficients to make the critical speed of the high-speed maglev vehicle change in the critical state were also analyzed. The results show that when the system reaches the critical state, it has two critical speeds. Under the conditions in the critical state, the position control parameters vary from 20 000 kN/m to 2 000 kN/m, and aerodynamic coefficients vary from 0.05 to 0.01, the critical speed gets larger. When the real part of the eigenvalue is zero, but the imaginary part is not zero, the first kind of critical velocity occurs. When both the real part and the imaginary part of the eigenvalue is zero, the second kind of critical velocity appears. Instability is caused by the change from the equilibrium position for the curved guideway and wind loads. Aerodynamic downward force and centrifugal wind loads are not good for stability, but aerodynamic upward force and centripetal wind loads improve stability. The horizontal angle can be matched with the centripetal force, but the vertical angle is allowed to be set in a small range.
Key words: the high-speed maglev vehicle; critical speed; eigenvalue; aerodynamic effect; motion stability
磁浮EMS(electric magnetic suspension)車輛具備低能耗、更環保、低噪音、少維護、更強的爬坡能力,更小的曲線半徑,受到越來越多的關注。考慮氣動荷載,維持磁浮系統在曲線上的運動穩定性對保證磁浮交通的安全至關重要。
一些學者研究了懸浮系統的穩定性。吳晗等[1]計算了車輛導軌耦合系統在考慮間隙反饋控制時滯的影響;黎松奇等[2]推導系統動力穩定應滿足的基本條件;洪遠卓等[3]利用SIMPACK動力學軟件對四模塊空簧中置型磁浮車輛的運行穩定性進行了仿真分析;楊志安等[4]應用MLP法得到了磁浮列車響應曲線和相圖;洪華杰等[5]得出了防滾裝置參數設定的基本準則;梁瀟等[6]得到狀態觀測器參數對系統性能的影響規律;黎松奇等[7]研究磁浮車通過軌道變坡點時穩定性的影響;洪華杰等[8]基于奈奎斯特穩定性理論得到了車軌耦合系統穩定的充分條件;樸明偉等[9]并應用靈敏度函數和最大奇異值進行了魯棒穩定性分析;馬鐵剛[10]利用ADAMS和MATLAB協同平臺,進行了單軌正交模型的高速運行仿真;陳曉昊等[11]通過Routh-Hurwitz穩定性判據判斷系統特征根分布,定量給出了系統發生Hopf分岔時滯臨界值;周又和等[12]采用Liapunov特征指數判別動力穩定性;忽偉[13]建立了剛性、柔性軌道的磁懸浮系統模型,得到了控制參數的穩定域。
一些學者研究磁浮車的平面曲線、豎曲線的匹配關系。謝毅等[14]認為線路橫坡角小于10°時,平面緩和曲線最小長度主要受最大側向沖擊控制,橫坡角繼續增大后,則取決于最大橫坡扭轉率;李茂春等[15]通過作圖法對四懸架進行理論計算分析;王澤漢等[16]研究表明目前的車輛參數及結構狀態下車輛不可以通過S形曲線;李東帥等[17]研究表明,深度神經網絡預測的軌道不平順值與真實值相對精度超過 99%;時瑾等[18]研究車輛過圓曲線時懸浮力變化,分析轉向架結構和圓曲線的幾何匹配關系,計算車輛部件偏移量、懸浮力變化量、彈簧變形量等,給出最小圓曲線半徑的合理取值;黃志輝等[19]探討了空氣彈簧的最大拉伸量和最大壓縮量,計算了第1、第5模塊相對車廂的最大點頭角;米隆等[20]對平、豎緩和曲線長度及參數匹配關系進行了量化研究;張耿等[21]基于磁通管法得到的電磁力更接近有限元計算結果;代一帆等[22]研究結果表明,相比與凸豎曲線圓曲線半徑重疊,凹豎曲線與圓曲線半徑重疊具有更好的匹配靈活性。
一些學者關注氣動荷載對磁浮車振動的影響。李人憲等[23]研究在橫向風的作用下,輪軌型列車的橫向穩定性優于磁浮列車,而吸力型的橫向穩定性又優于斥力型車;Wu等[24]研究了空氣動力效應對高速磁懸浮列車運動穩定性內在機理;Kwon等[25]研究了陣風對磁懸浮列車的響應影響;Yau[26]計算了非定常氣流對車輛-軌道耦合系統的影響;武建軍等[27]利用有限元軟件,采用Kutta-Merson進行動力分析,研究磁懸浮車輛在風場作用下的響應。以上研究對氣動荷載計算有了初步的研究,但是沒有分析氣動荷載對曲線導軌上的磁浮車運動穩定性的影響。下面的幾點值得關注:① 在以往的研究中,氣動荷載采用有限元方法計算氣動力作用在磁浮車輛上,然而氣動力是一種隨機荷載;② 前面的研究集中在低、中速車輛,氣動荷載考慮不多;③ 目前,曲線上的穩定性研究不多。基于前面的考慮,建立一個考慮氣動力的雙自由度磁浮車模型。使用這個模型,我們可以分析氣動荷載對磁浮車運動穩定性的影響。
1 系統模型
剛體橫向、豎向兩自由度的模型,是分析磁浮車曲線運動的基本單元。如果是考慮磁浮車曲線運動的振動特征,需要考慮多個自由度。但是,分析磁浮車在曲線上的運動宜考慮包含基本運動特征的兩個自由度模型。
1) 懸浮器的控制模型。在保證基本精度的前提下,可以對電磁力進行簡化。磁流關系在理想平衡點附近線性化。等效磁動剛度和等效磁動阻尼是常量。電磁力的公式如下
FEi=FE0+kep(δ-δ0)+kedδ
FE0
=
kep=
+
ked=a3kd
a1=
(kpδ0-i0R)
a2=
(kpδ0-i0R)2
a3=
(1)
式中:FEi為電磁力,N;FE0為初始電磁力,N;kep為等效磁動剛度,N/m;ked為等效磁動阻尼,N/(m/s);μ0為真空磁導率;N為電磁鐵或圓匝數;Am為有效磁板面積;i0為電流,A;δ為磁鐵和橋梁間的間隙;R為電阻。
2) 隨機激勵模型。ξ1為導軌豎向軌道不平順激勵,ξ2為磁浮車重量橫向激勵,ξ3為導軌橫向軌道不平順激勵,ξ4為磁浮車重量豎向激勵。需滿足以下關系
Rx1(τ)=E[ξ1(t) ξ1(t+τ)]=2πS1 δ(τ)
Rx2(τ)=E[ξ2(t) ξ2(t+τ)]=2πS2 δ(τ)
Rx3(τ)=E[ξ3(t) ξ3(t+τ)]=2D3 δ(τ)
Rx4(τ)=E[ξ4(t) ξ4(t+τ)]=2D4 δ(τ)? (2)
式中:E為協方差;t為時間變量;τ為時間間隔;S1和S2皆為導軌隨機不平順功率譜密度;D3和D4皆為磁浮車質量激勵的白噪聲強度。
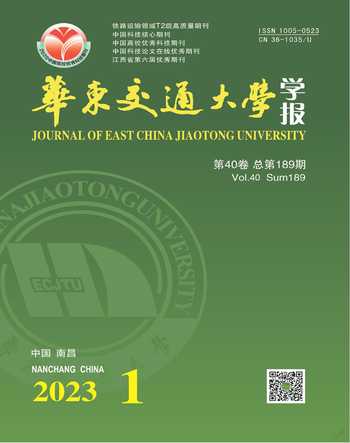
3) 剛體運動模型。在曲線地段,橫坡和縱坡同時存在。所以,剛體的運動平面需通過XOY平面繞Y軸旋轉β角度后再繞x軸旋轉α角,得xoy平面(圖1)。
本文以凸豎曲線進行分析參考。在平、豎曲線重疊地段,列車受到由平曲線產生的水平離心力FH和由豎曲線產生的豎向離心力FV,軌道對列車的支承磁浮力為N,列車受到重力mc的作用,如圖1所示。設列車運行速度為v,縱坡坡度為β,平面曲線半徑為RH,豎曲線半徑為RV[22]。
mcc+sinα+cosα-
(mcgcosβsinα+fhv)-(fmh0-kep1(y-y0)+
ked1y)+kδyξ1(t)+kmc1yξ3(t)=0
mcc+cosα+sinα+
mcgcosαcosβ-fvv-(fmv0-kep2(z-z0)+
ked2z)+kδzξ2(t)+kmc2zξ4(t)=0? (3)
其中,電流和氣動力如下:
fmvo=;
fmho=;
I0=(mccosα+mcsinα-
mcgsinαcosβ-fhv/μ0Am)(1/2)
或
I0=(-mccosα+mc
sinα-mcgcosαcosβ-fvv/μ0Am)(1/2);
kep1=-,
ked1=,
kep2=-,
ked2=。
對于凸豎曲線,豎曲線半徑RV取正;對于凹豎曲線,豎曲線半徑RV取負;對于豎向氣動升力fvv為負,對于豎向氣動降力fvv為負;對于橫向氣動向心力fhv為正,對于橫向氣動離心力fhv為負;法向vc向下取正,橫向zc向右取正;v為速度,m/s;mc為磁浮車質量,kg;fmh0為初始橫向磁浮力,N;fmv0為初始豎向磁浮力,N;kep1為磁鐵橫動剛度,N/m;kep2為磁鐵豎向向動剛度,N/m;ked1為磁鐵橫向動阻尼,N/(m/s);ked2為磁鐵豎向動阻尼,N/(m/s);y0為磁鐵橫向初始位移;z0為磁鐵豎向初始位移;kδy為導軌橫向不平順系數,kδz為導軌豎向不平順系數;kmc1為磁浮車重量橫向激勵系數,kmc2為磁浮車重量豎向激勵;kp為PD控制器間隙的反饋系數,kd為PD控制器間隙的一階導數的反饋系數;u0為電磁鐵電壓;I0為平衡電流。
fhv=
C2 ρAv(U+v)
fvv=
C3 ρAv(U+v)(4)
式中:ρ為空氣密度;Av為車輛的參考面積;C2為橫向氣動荷載系數;C3為豎向氣動荷載系數。
2 力學分析
考慮反饋控制量x=[? y? ? z]作為狀態變量,磁浮車橫豎向的系統方程為
=Ax+B? (5)
A=a11 a12 a13 a14
a21 a22 a23 a24
a31 a32 a33 a34
a41 a42 a43 a44,B=b11
b21
b31
b41? (6)
式中:
a11=±ked1,a12=-(kep1+kmc3ξ3(t)),a13=0,
a14=0,a21=1,a22=0,a23=0,a24=0,
a31=0,a32=0,a33=-ked2,
a34=-(kep2+kmc4ξ3(t)),a41=0,a42=0,
a43=1,a44=0;
b11=sinα+cosα-
mcgcosβsinα-fhv/fmh0+kep1y0+kδyξ1(t),
b31=cosα+sinα+
mcgcosαsinβ-fvv/fmv0+kep2z0+kδzξ2(t),
b21=0,b41=0
特征值公式為
λ4 +a1λ3+a2λ2=0 (7)
其中:
a1=ked1+ked2,a2=ked1·ked2
式(5)穩定性的條件為特征根的實數部分小于零。根據勞斯判據準則,非負特征根的充要條件為
a1>0,a1a2>0? (8)
控制參數的范圍主要由式(7)確定。如果氣動力改變,控制參數的范圍也跟著改變。
·>0
或
+>0? ?(9)
如果反饋控制參數kp固定,電磁鐵懸浮間隙y0 與z0 保持不變。根據式(1),當氣動力變化,平衡電流I0跟著變化,從而改變了系統的平衡位置。線性化系統式(1)依賴于平衡點的位置(u0,y0)和(u0,z0)。平衡位置的改變影響著閉環系統的特征值矩陣,也影響著式(7)特征值的系數。向心力時穩定,離心力依據條件穩定;升力時穩定,降力依據條件穩定。因此,氣動力影響著懸浮系統的穩定性。
隨著速度的增加,氣動力也增加。自然,平衡點的位置(I0,y0)和(I0,z0)隨著速度也變化。這意味著如果不考慮氣動力,剛性導軌上的磁浮車系統是獨立的。如果考慮氣動力,懸浮系統的穩定性與車輛速度息息相關。如果氣動力不考慮或者設置為零,控制參數的選擇條件滿足式(8)。然而,隨著速度的增加,氣動力超過某一個數值,控制參數就不能滿足穩定的條件。因此,磁浮車系統的分叉和失穩就發生了。
依據前面的分析,新的臨界速度概念被提出來,用來分析當氣動力作用時磁浮車的穩定性。在某一個氣動力條件下,當車輛的速度超過一個特定值時,特征矩陣的特征值實數部分等于零,懸浮系統達到了一個臨界的狀態,分叉產生。這個速度叫作臨界速度。
式(5)穩定的充要條件就是特征值的實數部分小于零。在臨界狀態,特征值的實數部分等于零。假設負數根為λ=α+iβ都是特征方程式(7)的根(α和β都是實數)。將其代入特征方程式,實數部分和虛數部分分離,得到
-α1 β2=0
-β3+α2 β=0(10)
當特征值λ的實數部分等于零,磁浮系統在平衡位置的穩定為臨界狀態。特征方程的4個特征根包含一對共軛負數根和兩個實數根。系統的穩定性有以下兩類臨界狀態。
1) 第一類臨界狀態:共軛特征根的實數部分為零。因此,α=0,λ=± β,懸浮系統的一個動力分叉(Hopf分叉)發生。這直接導致磁浮系統在干擾作用下出現極限環運動而不是收斂到零。
然后,獲得
α1=0,α2= β2? (11)
這種情況導出臨界速度vcritical-A。
2) 第二類臨界狀態:實數特征值等于零。比如,α=β=0,λ=0。因此,一個靜態的分叉發生了,導致磁浮車以意外的方式移動和系統的不穩定。因此式(9)變為α2=0。這種情況導出的臨界速度vcritical-B和vcritical-B。
3 數值分析
為了分析懸浮系統的穩定性,使用磁浮系統的參數如表1,氣動系數如表2。參考鐵路設施的空氣動力學部分標準(BS EN 14067-6:2018),并計算了氣動力。目前,基本沒有什么氣動力數據。在這次研究中,磁浮車氣動力的計算通過使用在高速車-軌耦合的氣動分析的相關數據。設置相關的面積為Am=10 m2,空氣密度為ρ=1.225 kg/m3,假定風速為10.7 m/s。氣動力分為氣動升力、氣動降力、氣動向心力、氣動離心力。氣動系數不隨著車速發生變化。
反饋控制參數設置為kp=20 000,kp=2 000兩種工況。選定的反饋控制參數滿足不考慮氣動力的穩定條件。特征值,考慮車速、氣動升力、氣動降力、氣動離心力、氣動向心力,在參數影響下確定了臨界速度。
3.1 氣動向心力和氣動升力
圖2和圖3分別展示了特征值隨著氣動力系數的變化。
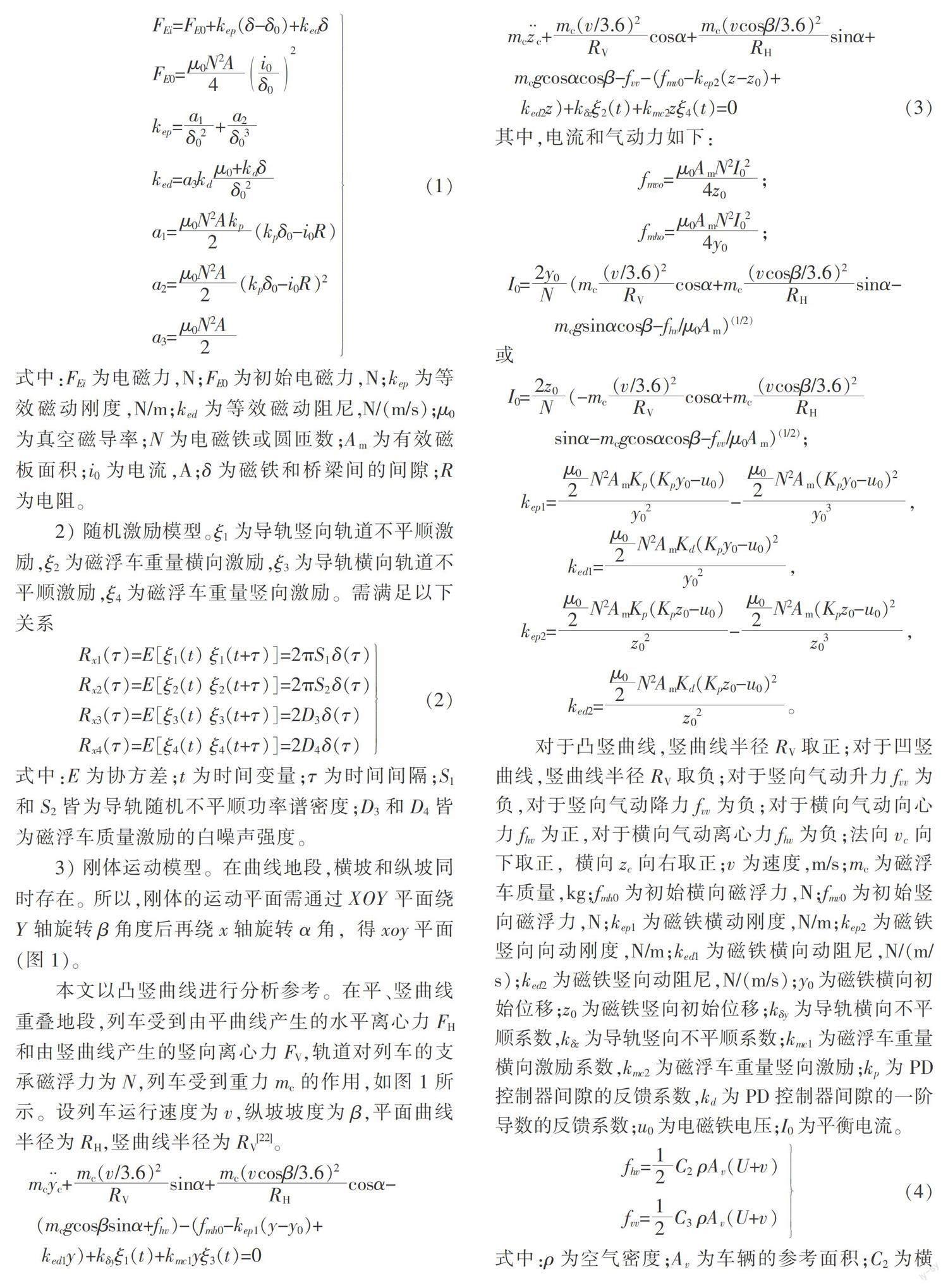
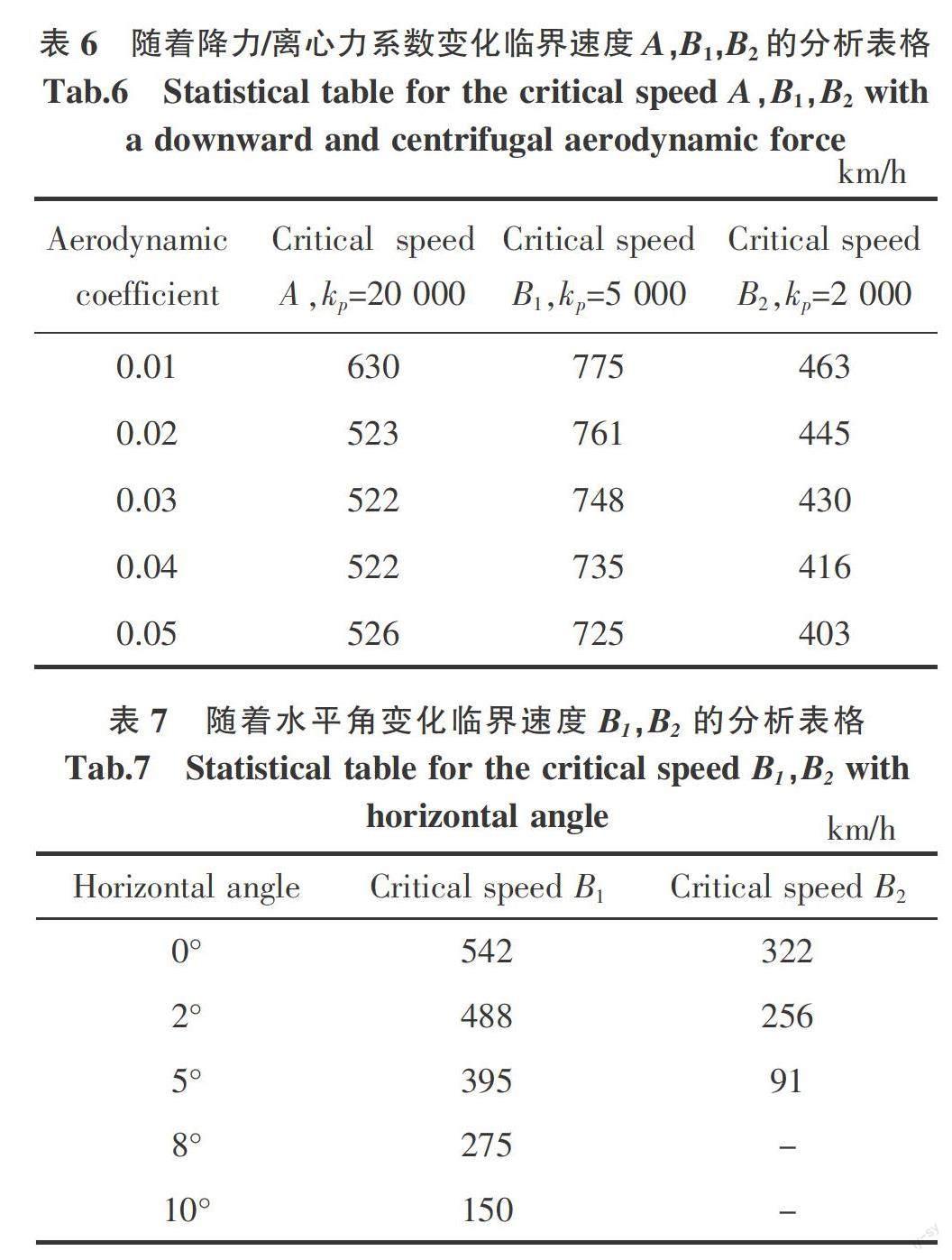
從表3~表5中可以看出:隨著車速增加,臨界速度A總體趨勢減小,臨界速度B1和B2增大。向心力作用下,隨著水平角的增大,臨界車速B1增大,臨界車速B2減小;升力作用下,隨著豎直角的增大,臨界車速B1增大,臨界車速B2減小。
3.3 臨界速度存在的條件
正如3.1和3. 2部分討論,當氣動系數越小,第一類臨界速度vcritical-A較大。當豎向坡度越大,第二類臨界速度vcritical-B較大。
1) vcritical-A的平方根內的表達式為零是車速達到臨界速度A的一個必要條件。
(-mcgcosβ)(cosα+sinα)+
(sinα-cosα)>0(12)
如果剛性導軌上的磁浮車系統中考慮氣動荷載滿足式(12)和氣動力不考慮時或者車速為零,懸浮系統在平衡位置是穩定的。系統在平衡位置上的穩定性描述如下。當車速v
2) vcritical-B和vcritical-B的平方根內的表達式為零是車速達到臨界速度B的一個必要條件。
-cosα+sinα+
mcgcosβcosα-()2μ0AN2>0(13)
-sinα-cosα+
mcgcosβsinα-()2μ0AN2>0(14)
如果剛性導軌上的磁浮車系統滿足式(13)和式(14),氣動力不考慮時或者車速為零,懸浮系統在平衡位置是穩定的。系統在平衡位置上的穩定性描述如下。當車速v
4 結論
1) 當在氣動向心力工況時,第一類臨界速度產生了。在這種情況下,臨界速度隨著位移控制參數的增加而減少;當在氣動降力工況時,第二類臨界速度產生了。不受控制速度反饋系數的影響。
2) 當磁浮車受到氣動向心力和氣動升力時,在水平角由0°增加到2°,臨界速度B2由504 km/h降低到410 km/h;在豎直角由0°增加到4°,臨界速度B2由500 km/h降低到278 km/h;氣動升力系數由0.01增加到0.05,臨界速度A1由620 km/h降低到530 km/h,臨界速度B2由506 km/h增加到640 km/h。
3) 當磁浮車受到氣動離心力和氣動降力時,在水平角由0°增加到5°,臨界速度B2由322 km/h降低到91 km/h;在豎直角由0°增加到1°,臨界速度B2由335 km/h發展到無臨界速度;氣動升力系數由0.01增加到0.05,臨界速度A1由630 km/h降低到526 km/h,臨界速度B2由463 km/h減小到403 km/h。
參考文獻:
[1] 吳晗,曾曉輝,史禾慕. 考慮間隙反饋控制時滯的磁浮車輛穩定性研究[J]. 力學學報,2019,51(2):550-557.
WU H,ZENG X H,SHI H M. Stability analysis of maglev vehicle with delayed position feedback control[J]. Chinese
Journal of Theoretical and Applied Mechanics,2019,51(2):550-557.
[2] 黎松奇,張昆侖,陳殷,等. 彈性軌道上磁浮車輛動力穩定性判斷方法[J]. 交通運輸工程學報,2015(1):43-49.
LI S Q,ZHANG K L,CHEN Y,et al. Judgement method of maglev vehicle dynamic stability on flexible track[J]. Journal of Traffic and Transportation Engineering,2015(1):43-49.
[3] 洪遠卓,羅華軍,佟來生,等. 新型四模塊中低速磁浮車輛直線段運行穩定性研究[J]. 機車電傳動,2020(6):88-92.
HONG Y Z,LUO H J,TONG L S,et al. Study on operation stability of new four modules middle-low speed maglev vehicles on a straight track[J]. Electric Drive for Locomotives,2020(6):88-92.
[4] 楊志安,崔佳磊. 基于MLP法的磁浮列車非線性系統的穩定性分析[J]. 唐山學院學報,2019 32(3):1-7.
YANG Z A,CUI J L. Stability analysis of nonlinear systems in the maglev train based on MLP method[J]. Journal of Tangshan College,2019,32(3):1-7.
[5] 洪華杰,李杰,張錳. EMS型磁浮列車系統滾動穩定性研究[J]. 控制工程,2006,13(4):314-316.
HONG H J,LI J,ZHANG M. On the rolling stability of EMS maglev train system[J]. Control Engineering of China,2006,13(4):314-316.
[6] 梁瀟,馬衛華,肖溪玥,等. 狀態觀測器參數對磁浮車輛懸浮穩定性影響的仿真研究[J]. 鐵道科學與工程學報,2019,
16(4):1026-1032.
LIANG X,MA W H,XIAO X Y,et al. Simulation research on the effect of stateobserver parameters on suspension stability of maglev vehicles[J]. Journal of Railway Science and Engineering,2019,16(4):1026-1032.
[7] 黎松奇,張昆侖,劉國清,等. EMS型磁浮列車通過變坡點的穩定性研究[J]. 信息與控制,2015,44(4):493-498.
LI S Q,ZHANG K L,LIU G Q,et al. The stability study of EMS-type magelv vehicle through grade change point[J]. Information and Control,2015,44(4):493-498.
[8] 洪華杰,李杰,張錳. 磁浮車軌耦合系統穩定性分析[J]. 控制理論與應用,2006(3):421-428.
HONG H J,LI J,ZHANG M. Stability analysis of magnetic levitation system with vehicle-guideway interaction[J]. Control Theory and Applications,2006(3):421-428.
[9] 樸明偉,石得春,梁世寬,等. 高速磁浮車EMS主動控制的魯棒穩定性分析[C]//北京:2005全國計算機輔助工程(CAE)技術與應用高級研討會論文集,2005.
PIAO M W,SHI D C,LIANG S K,et al. Stability robustness analysis of high-speed maglev train′s EMS active control[C]//Beijing: Proceedings of 2005 National Advanced symposium on Computer Aided Engineering(CAE) Technology and Application,2005.
[10] 馬鐵剛. 高速磁浮車主動懸浮導向控制穩定性研究[D]. 大連:大連交通大學,2005.
MA T G. The study on stability of levitation and guidance active control in high-speed maglev train[D]. Dalian:Dalian Jiaotong University,2005.
[11] 陳曉昊,馬衛華. 控制器時滯對磁浮系統穩定性影響分析[J]. 機車電傳動,2019(2):139-147.
CHEN X H,MA W H. Analysis on the effect of controller time delay on the stability of maglev system[J]. Electric
Drive for Locomotives,2019(2):139-147.
[12] 周又和,武建軍,鄭曉靜,等. 磁浮列車的動力穩定性分析與Liapunov指數[J]. 力學學報,2000(1):42-51.
ZHOU Y H,WU J J,ZHENG X J,et al. Analysis of dynamic stability for magnetic levitation vehicles by Liapunov characteristic number[J]. Acta Mechanica Sinica,2000(1):42-51.
[13] 忽偉. 磁懸浮列車的運動穩定性研究[D]. 天津:河北工業大學,2014.
HU W. Research on motion stability of maglev vehicles[D]. TianJing:Heibei University of Technology,2014.
[14] 謝毅,寇峻瑜,余浩偉. 高速磁浮最小曲線半徑及緩和曲線長度研究[J]. 鐵道工程學報,2020(4):43-48.
XIE Y,KOU J Y,YU H W. Research on the minimum plane curve radius and transition curve length of high-speed maglev[J]. Journal of Railway Engineering Society,2020(4):43-48.
[15] 李茂春,郭慶升. 四懸浮架中低速磁浮車輛曲線通過分析[J]. 新型工業化,2021,11(3):128-130.
LI M C,GUO Q S. Curve passing analysis of medium and low speed maglev vehicle with four suspension frames[J]. The Journal of New Industrialization,2021,11(3):128-130.
[16] 王澤漢,楊新斌. 中低速磁浮車輛S形曲線通過性能分析[J]. 鐵道車輛,2020,58(11):1-3.
WANG Z H,YANG X B. Analysis of S-curve negotiation performances for medium-low speed maglev vehicles[J]. Railway Vehicle,2020,58(11):1-3.
[17] 李東帥,黃靖宇. 基于深度學習的高速磁浮軌道不平順預估[J]. 華東交通大學學報,2020,37(3):44-51.
LI D S,HUANG J Y. Prediction of high-speed maglev track irregularity based on deep learning[J]. Journal of East China Jiaotong University,2020,37(3):44-51.
[18] 時瑾,魏慶朝,鮑鳳麒. 中低速磁浮交通圓曲線參數影響因素分析[J]. 都市快軌交通,2010(3):68-71.
SHI J,WEI Q C,BAO F Q. Influence factors of circular curve parameters on medium and low speed maglev system [J]. Urban Fast Rail Transit,2010(3):68-71.
[19] 黃志輝,高定剛. 常導中低速磁浮車輛豎曲線通過分析[J]. 鐵道車輛,2005,43(11):5-6.
HUANG Z H,GAO D G. Analysis of negotiation through vertical curves by magnetic levitation vehicles with common conductor and medium or low speed[J]. Railway Vehicle,2005,43(11):5-6.
[20] 米隆,招陽,魏慶朝,等. 磁浮交通系統線路緩和曲線參數取值方法研究[J]. 北京交通大學學報,2007(4):92-100.
MI L,ZHAO Y,WEI Q C,et al. Research on alignment parameters of high-speed maglev railway transaction curve [J]. Journal of Beijing Jiaotong University,2007(4):92-100.
[21] 張耿,李杰. 低速磁浮列車豎曲線電磁力計算[J]. 中國電機工程學報,2012,32(3):150-156.
ZHANG G,LI J. Calculation of electromagnetic force of low-speed maglev on a vertical curve[J]. Proceedings of the CSEE,2012,32(3):150-156.
[22] 代一帆,劉萬明. 高速磁浮平、豎曲線重疊地段線路參數研究[J]. 交通科學與工程,2019,35(2):100-105.
DAI Y F,LIU W M. Research on alignment parameters of high-speed maglev at horizontal and vertical curve overlapped region[J]. Journal of Transport Science and Engineering,2019,35(2):100-105.
[23] 李人憲,翟婉明. 磁懸浮列車橫風穩定性的數值分析[J]. 交通運輸工程學報,2001,1(1):99-101.
LI R X,ZHAI W M. Numerical anlysis of crosswind stability of magnetically levitated trains[J]. Journal of Traffic and Transportation Engineering,2001,1(1):99-101.
[24] WU H,ZENG X H,YU Y. Motion stability of high-speed maglev systems in consideration of aerodynamic effects:A study of a single magnetic suspension system[J]. Acta Mechanica Sinica(English Series),2017,33(6):1084-1094.
[25] KWON S D,LEE J S,MOON J W,et al. Dynamic interaction analysis of urban transit maglev vehicle and guideway suspension bridge subjected to gusty wind[J]. Engineering Structures,2008,30(12):3445-3456.
[26] YAU J D. Aerodynamic vibrations of a maglev vehicle running on flexible guide ways under oncoming wind actions[J]. Journal of Sound and Vibration,2010,329(10):1743-1759.
[27] 武建軍,史筱紅. 橫向風場作用下磁懸浮車體運動穩定性數值研究[J]. 蘭州大學學報(自然科學版),2009,45(2):96-102.
WU J J,SHI X H. Numerical analyses of dynamic stability of maglev vehicles in crosswind field[J]. Journal of Lanzhou University(Natural Sciences),2009,45(2):96-102.