基于人工智能算法的太陽能水面垃圾回收裝置研究*
2023-06-01 08:07:42李福冬孟德明陳尉棋曹新玉楊弦璀廖夢杰
科技與創新 2023年10期
關鍵詞:單片機
李福冬,唐 甜,2,孟德明,2,陳尉棋,曹新玉,楊弦璀,廖夢杰
(1.桂林電子科技大學信息與通信學院,廣西 桂林 541004;2.桂林電子科技大學電子電路國家級實驗教學示范中心,廣西 桂林 541004)
截至2022 年,全球水面垃圾數量將達6 億t,不僅污染環境,還造成資源浪費。對垃圾的回收是綠色家園建設的保證,引起了全民的關注,目前市面上出現了一些垃圾回收的裝置[1-2]。本文基于人工智能算法的太陽能水面垃圾回收裝置,可全天候24 h 工作,擁有GNSS 全球衛星導航系統和自主導航系統,可實現無人自主工作,攜帶九軸傳感器,可以克服極端天氣,實現了安裝平衡及正常工作。此外還配置了太陽能電池板,提高裝置的續航能力。
1 水面垃圾回收裝置的研發現狀分析
“廈門灣海漂垃圾漂移軌跡預測系統”是在西北太平洋、臺灣海峽及中國沿海港灣的水動力模型的基礎上,結合廈門海洋垃圾監測與防治的管理需要進行的精準研發[1]。該系統基于天氣預報模型、海洋數值預報模型,融合了海漂垃圾實時監控信息,模擬并預測廈門灣海漂垃圾漂移軌跡,然后通過廈門大學海洋監測與信息服務中心進行發布和推送。
歐洲SeaClear 科研團隊開發了一種可在水下收集垃圾的機器人系統——“凈海”,該系統通過深度學習算法和聲學傳感器將垃圾與動植物區分開來,使用定制設計的抓取器和抽吸設備收集檢測到的垃圾,并將垃圾放到位于水面的收集箱中。通過多主體控制技術,將所有機器人都相互連接,除了設置一個機器人的初始命令外,整個系統無需人工干預。
海上垃圾回收裝置正在向小中型機器人研究進發,采用MSP430 單片機下C 語言編程設計,能大大提高處理問題的能力[3];使用超聲波避障尋找垃圾,對垃圾位置進行精確定位;采用太陽能源與電池結合的電能供給方案,提高工作效率。
2 水面垃圾回收裝置的工作機理分析
2.1 人工智能算法
通過采用計算機技術,在多個函數的控制下構建復雜而完整的系統,通過高質量擬合效果的神經網絡算法,提高對識別對象具體的信息處理的能力。本裝置利用計算機技術的云計算,采用神經網絡算法,相對于傳統的回收裝置,擁有更高的數據信息檢索能力和更快的信息匹配能力,在高效回收垃圾的同時,不影響水中生物的正常棲息。
2.2 太陽能動力源
太陽能動力源的核心為太陽能發電裝置,實現能量的轉化,為水面垃圾回收裝置提供源源不斷的電能。用數字信號處理作為系統控制核心,以Boost 升壓電路作為主回路,同時還有逆變電路、并網跟蹤零電路等其他外圍電路組成太陽能發電系統。本文設計的太陽能發電系統應用到的是單片機STM32 系列[4],可通過主板設計來改善系統抗干擾能力及擴展能力,擁有超低的研發成本,實時性能好,更適合于太陽能發電系統的設計。
2.3 水面垃圾回收裝置
將水面垃圾回收裝置放置于水流湍急的漩渦處,利用水流的流動性,將水面垃圾匯集到垃圾回收裝置附近,不僅可以節省能量,還可以提高垃圾回收效率。只需要消耗較小的能量作為動能,實現能量的最大利用。據相關數據統計,可以將裝置的能耗降低3%,再加上太陽能裝置不斷發電,實現裝置更高的續航。對于水面垃圾的識別,采用CCD(Charge Coupled Device)傳感器,將電荷轉換成為電壓,然后進行AD(模數)轉換得到圖像,用時鐘脈沖驅動,將生成的視頻信號進行二值化處理,分辨是否為水面垃圾。
3 水面垃圾回收裝置的設計
3.1 總體設計
水面垃圾回收裝置設計過程中,外形設計為圓滑桶形,減少裝置在水面移動所產生的阻力。在上表面安裝一塊太陽能板,當太陽光照射時,將它產生的能量不斷地轉換成電能儲存到圓桶形底部的電池中。在圓形桶上部安裝浮力倉裝置,以便水面垃圾回收裝置能夠懸浮在水面上。推進器安裝在圓桶兩側的中上部,讓水面垃圾回收裝置能夠在水面上移動。在圓桶中部安裝感應器和GPS(Global Positioning System)定位裝置,通過紅外感應器感應,偵測前方是否存在障礙物,通過CDD 傳感器識別垃圾,將信息反饋到終端。裝置內部設置成一個內膽,內部套上一個可重復利用的碳纖維袋子。底部設計成圓形的發動機裝置,可將周圍垃圾在吸力作用下吸進內膽袋子,從而完成垃圾的收集。裝置剖面圖如圖1 所示。

圖1 人工智能算法的太陽能水面垃圾回收裝置剖面圖
為方便用戶使用設備,在設備中加入Wi-Fi 模塊,將工作狀態信息傳至用戶手機APP 或PC 端,實時了解工作情況,并能夠及時調整設備工作狀態,保證設備正常工作。
3.2 水面垃圾回收裝置的功能性設計
3.2.1 太陽能板穩壓輸出電路
為使太陽能板充電電路能夠在恒電流、恒電壓模式下對鋰電池進行充電,采用充電芯片TP4056。該芯片集成功率MOSFET 電路的降壓開轉換器,有過熱關斷保護功能。鋰電池也可以給充電模塊進行反向供電,實現無充電情況下維持低功耗的工作模式,同時監測設備的單片機不斷檢測鋰電池的電壓。當電壓低于4.2 Ⅴ時,開啟充電模式;當鋰電池的電壓達到浮充電壓后,芯片將充電的電流降到初始設定電流值的10%,芯片TP4056 將停止對鋰電池的充電,同時將鋰電池的充電電流模式調整成低電流充電模式,起到保護電池的作用,提高電池壽命。TP4056 芯片控制流程如圖2 所示。

圖2 TP4056 芯片控制流程圖
3.2.2 平衡和驅動系統
為使裝置更好地平衡懸浮在水面上工作,采用九軸傳感器模塊MPU9250,對裝置姿態數據進行采集;采用超聲波測距模塊HY-SRF05,測與前方障礙物之間的距離;采用藍牙模塊ZS-040,與上位機建立連接并發送指令。
采用九軸傳感器模塊MPU9250 首先檢測裝置的傾斜角度和加速度,并將數據傳送至STM32F103 單片機,單片機調用片內燒錄的角度控制函數,使用PD(Priority-driven scheduling)算法計算出相應的PWM(Pulse Width Modulation)波并輸出至電機驅動模塊L,控制電機轉動,抵消裝置的傾斜,達到直立平衡。
超聲波測距模塊HY-SRF05 通過超聲波發射器自動發出方波,并且檢測有無信號返回,當超聲波接收器接收到返回信號時,通過I/O 口輸出高電平,由高電平持續的時間計算得到測試距離。
藍牙模塊ZS-040在空曠環境下的有效傳輸距離達10 m,與上位機建立連接,發送前進、后退、左轉、右轉指令控制裝置運動。平衡和驅動系統如圖3 所示。
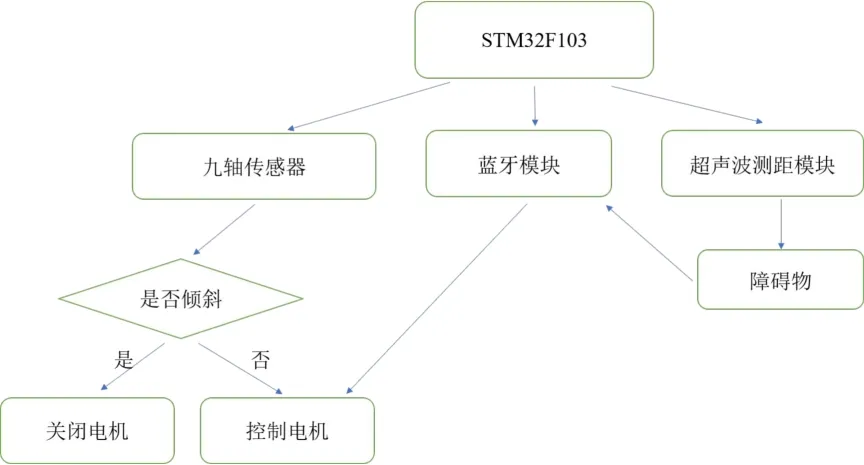
圖3 平衡和驅動流程圖
3.2.3 傳感器感應系統
對障礙物的識別處理,采用紅外感應技術。紅外發射二極管采用直向發射,有垃圾在附近時,阻礙紅外線的發射,一部分紅外線反射回來。通過模塊電路的處理,輸出電平信號,從而實現單片機對障礙物的感應。
3.2.4 實時動態-全球衛星導航系統(RTK-GNSS)
在水面區域,由于水流等因素導致裝置視角范圍限制及計算延遲,不能準確預判裝置行駛路線,采用實時動態-全球衛星導航系統(RTK-GNSS)能夠更好地進行工作[5]。
RTK-GNSS 可對儲存路徑信息及實時定位進行導航。且GNSS 導航系統采用RTK(Real-Time Kinematic)載波相位差分定位技術,定位信號更新頻率最高為10 Hz,動態水平定位精度為±1 cm,動態垂直定位精度為±2 cm。RTK-GNSS 為裝置提供高精度定位信息。慣性傳感器可以自主感應水面機器的3D運動角速度和線加速度,基于航位推算原理進行導航定位,以GNSS定位為主,融合MEMS(Micro-Electro-Mechanical System)慣性傳感器,實現導航定位。實時動態-全球衛星導航系統流程圖如圖4 所示。

圖4 實時動態-全球衛星導航系統流程圖
3.3 技術優勢
裝置采用基于人工智能的神經網絡算法,可以快速獲取圖像,確定識別的物體。平衡感應裝置在感應到水面浮動后調節裝置的平衡,使裝置正常運行。該裝置安裝了GNSS 全球衛星導航系統和自主導航系統,可精確定位裝置所在位置,以便于管理員實時監控。在未來的市場中,可以將該裝置投放于更多的江河流域,實現全自動化清理垃圾。在技術成熟時,可以對其部分技術進行升級和擴展。
4 結論
本文提出了一種基于人工智能算法的太陽能水面垃圾回收系統,并給出了該水面垃圾回收裝置的結構設計及控制系統設計流程。該裝置以GNSS 定位為主,融合了MEMS 慣性傳感器,攜帶九軸傳感器聯合電機驅動實現裝置可控,針對水上漂浮式垃圾尤其是水漂垃圾的分散性等特點,可主動對水上漂浮物進行生態打撈,提高中國對水上漂浮物垃圾的處理效率和質量。
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設計工程(2015年15期)2015-02-27 12:07:30
電子設計工程(2015年8期)2015-02-27 12:05:36
