高空作業平臺曲臂變幅液壓缸力學分析與研究
2023-06-07 14:30:14張延強
中國新技術新產品 2023年6期
張延強
(沈陽新松機器人自動化股份有限公司,遼寧 沈陽 110000)
0 引言
高空作業平臺是工程機械領域中將施工人員、材料和作業工具等運送到指定高度進行施工作業的工程設備。目前,針對高空作業平臺載荷的計算主要采用理論計算,剪叉式結構主要采用虛位移原理分析方法[1-2],曲臂式結構主要采用靜力學分析方法[3],也有部分采用虛位移原理分析方法[4],但計算過程相對復雜。該文采用理論計算和仿真2 種方法對曲臂式高空作業平臺結構進行力學分析計算。
1 高空作業平臺曲臂結構概述
曲臂式高空作業平臺主要由曲臂結構、伸縮臂、折疊小臂結構、作業平臺4 部分組成,如圖1 所示。
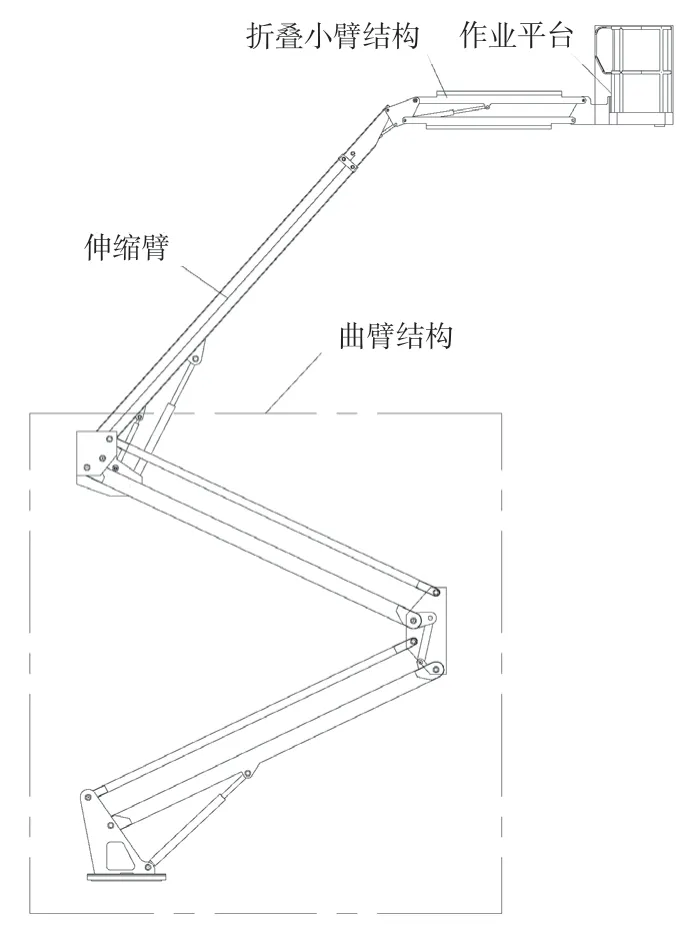
圖1 曲臂式高空作業平臺組成圖
曲臂結構組成如圖2 所示。根據圖2 可知,曲臂結構主要由上、下2 個平行四邊形機構通過中間的反向傳動四桿機構串聯而成,其中上平行四邊形機構由機架FH、上曲臂、上連架桿臂及連桿IJ組成;下平行四邊形機構由機架AB、下曲臂、下連架桿臂及連桿DE組成;反向傳動四桿機構由機架FD、連架桿FG、連架桿CD及連桿CG組成。下平行四邊形機構由曲臂變幅油缸支撐。動作過程如下:曲臂變幅油缸動作時,下平行四邊形機構變幅展開,通過連桿帶動上平行四邊形機構變幅展開,使2 個平行四邊形機構同步完成升降動作。
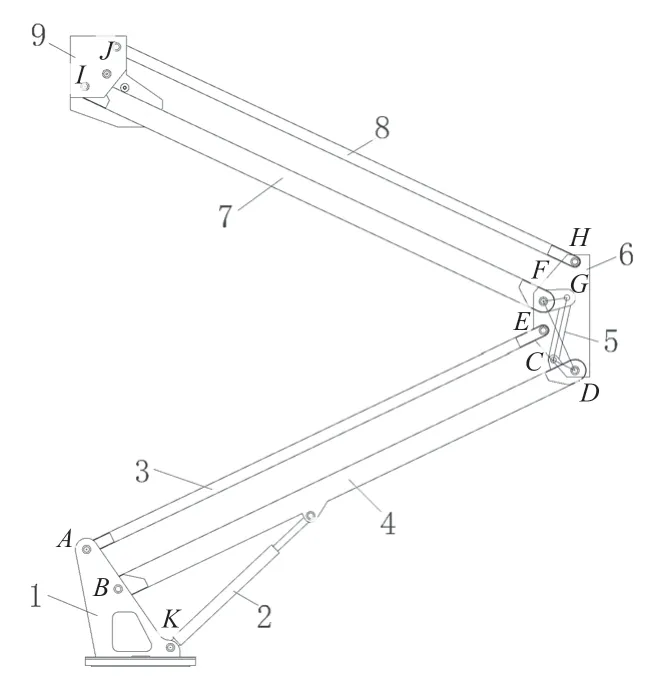
圖2 曲臂結構組成圖
2 曲臂變幅液壓缸推力計算
該文主要對曲臂變幅液壓缸進行力學分析與研究。分析過程為曲臂展開過程:曲臂變幅由0°運動到最大變幅角度72°,伸縮臂、小臂折疊結構和作業平臺之間相對靜止,隨曲臂變幅動作。
2.1 基于虛位移原理的液壓缸推力計算
和靜力學計算相比,虛位移原理計算具有明顯優點,即計算時不需要聯立復雜的方程組求出那些不需要的約束反力,極大地簡化了運算過程。
虛位移原理:具有理想約束的質點系在給定位置保持平衡的充分必要條件為所有作用于該質點系的主動力在該位置的虛位移中所做的虛功之和等于零[5],如公式(1)所示。
式中:Fxi、Fyi、Fzi分別為質點i在x、y、z這3個方向所受的主動力;δxi、δyi、δzi分別為質點i在x、y、z這3 個方向的虛位移;n為質點系中質點的個數。
對于曲臂式高空作業平臺,為了得到曲臂變幅液壓缸載荷,需要先求出拉桿臂載荷,然后再根據拉桿臂載荷計算出液壓缸載荷。
2.1.1 拉桿臂載荷計算
計算拉桿臂載荷時,以上平行四邊形機構為研究對象,如圖3 所示。以H點為原點,水平向左為X軸,豎直向上為Y軸,建立直角坐標系。
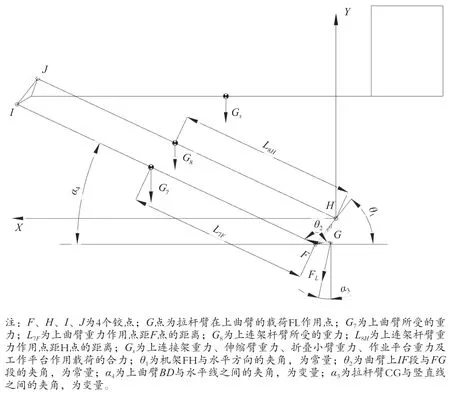
圖3 上平行四邊形機構受力分析簡圖
根據虛位移原理可以得到公式(2)。
根據平行四邊形運動規律,上連接架、伸縮臂、折疊小臂和作業平臺整體平動,因此可得公式(13)。
帶入整理得公式(14)。
2.1.2 曲臂變幅液壓缸載荷計算
計算曲臂變幅液壓缸載荷時,以下平行四邊形機構為研究對象,如圖4 所示。以A點為原點,水平向左為X軸,豎直向上為Y軸,建立直角坐標系。
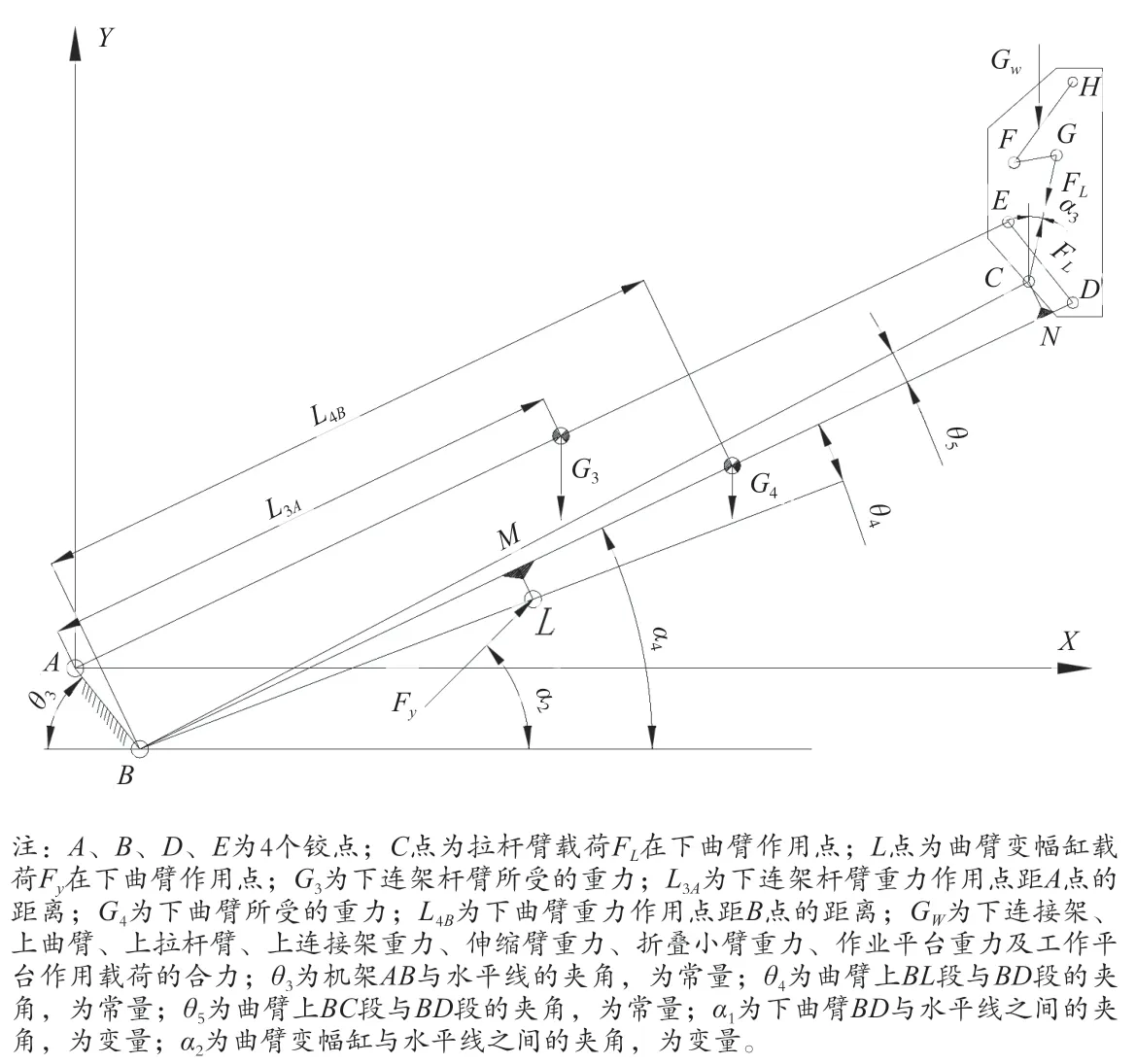
圖4 下平行四邊形機構受力分析簡圖
根據虛位移原理可得公式(15)。
各點的坐標如公式(16)~公式(23)所示。
對上式取虛微分,可得公式(24)~公式(31)。
根據平行四邊形運動規律,下連接架、上曲臂、上拉桿臂、上連接架重力、伸縮臂、折疊小臂和作業平臺整體平動,因此可得公式(32)、公式(33)。
帶入整理得公式(34)。
由公式(14)、公式(34)可知,FL是關于變量α3、α4的函數,Fy是關于變量FL、α1、α2、α3的函數,因此,Fy是關于變量α1、α2、α3、α4的函數。而α2、α3、α4根據幾何關系均可以表示成關于α1的函數,因此Fy最終可以表達成關于α1的函數。
2.2 基于solidworks 軟件的液壓缸推力計算
2.2.1 仿真模型的建立
根據結構參數,利用solidworks 軟件建立高空作業平臺的三維實體模型,并根據實際質量參數賦予各部件質心位置和質量。
2.2.2 運動副的施加
在solidworks 軟件中,運動副的施加就是配合關系的建立,為了保證動力學分析結果的合理性和準確性,在滿足整個系統相對運動關系的同時,還要保證整個系統為0 冗余系統。
2.2.3 載荷的施加
在仿真過程中,主要考慮臂架載荷和額定載荷。根據高空作業車相關標準,額定載荷主要包括人員和工具的質量,為220kg,臂架載荷為臂架的重力,通過重力加速度施加,為9.8m/s2。
2.2.4 驅動的施加
在仿真過程中,為了便于得到均勻角度下的驅動力的值,曲臂變幅角速度以0.5r/min 勻速運動,對曲臂變幅缸施加驅動。驅動速度變化曲線如圖5 所示。
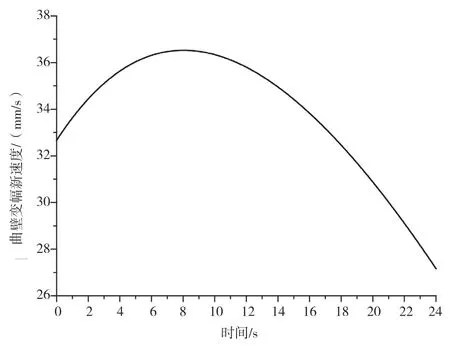
圖5 曲臂變幅缸速度曲線
2.2.5 仿真的設置
設置仿真時間為24s,仿真步長為3F/s,即每1°輸出一個結果。
3 結果對比
理論計算與仿真分析得到的拉桿臂載荷隨變幅角度變化的載荷曲線如圖6 所示。
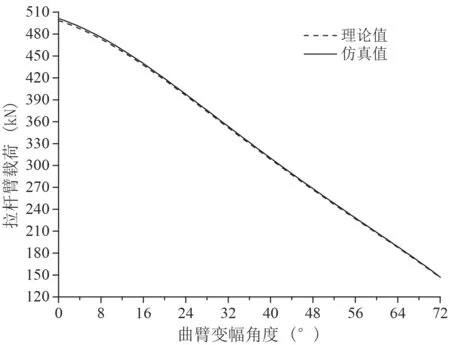
圖6 拉桿臂載荷曲線
理論計算與仿真分析得到的曲臂變幅液壓缸載荷隨變幅角度變化的載荷曲線如圖7 所示。
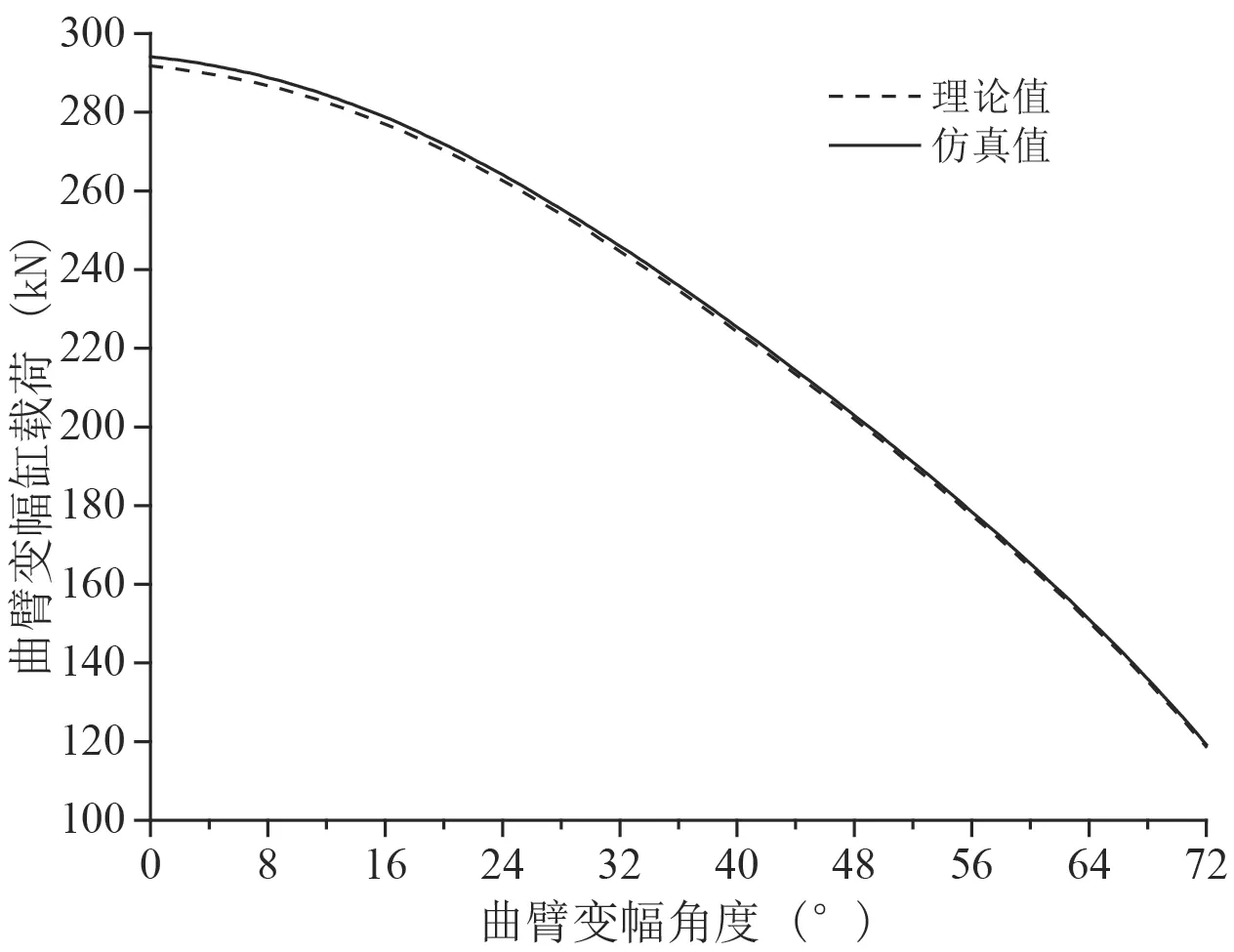
圖7 曲臂變幅缸載荷曲線
通過結果對比可知,2 種方法得到的載荷曲線變化趨勢相同,仿真計算結果與理論結果存在一定的偏差,主要原因為動力學分析的方法在仿真過程中考慮了各結構件慣性載荷的影響。
拉桿臂及曲臂變幅缸載荷對比見表1。通過結果對比可知,經過虛位移原理與仿真計算2 種方法的計算,拉桿臂及曲臂變幅缸的偏差在1%以內,2 個計算結果比較吻合,驗證了計算結果的準確性。當α1=0°時,該高空作業平臺拉桿臂載荷和曲臂變幅缸載荷都達到最大值,拉桿臂載荷的理論計算結果為498.39kN,仿真計算結果為501.30kN,曲臂變幅缸載荷的理論計算結果為291.75kN,仿真計算結果為294.18kN。

表1 拉桿臂及曲臂變幅缸載荷對比
4 結語
該文采用虛位移原理方法得到了曲臂變幅缸和拉桿臂載荷計算的表達式,并通過mathematica 軟件和solidworks 軟件動力學仿真2 種方法得到了曲臂變幅缸和拉桿臂載荷隨變幅角度變化曲線,2 條曲線最大偏差在1%以內,吻合度高。并確定了曲臂變幅缸和拉桿臂受力最危險的狀態,2 種方法計算結果準確,計算效率高,可為后續高空作業平臺設計及變幅液壓缸選型提供依據。