基于無人機傾斜攝影測量的大比例尺地形圖測制
2023-06-07 14:30:26吳金明
中國新技術新產品 2023年6期
吳金明
(遼寧省檢驗檢測認證中心,遼寧 沈陽 110034)
0 引言
隨著數字城市建設的高速發展,對大比例尺地形圖的應用及快速更新提出更高的要求。大比例尺地形圖數據是指1 ∶2000、1 ∶1000、1 ∶500 比例尺地形圖,現階段廣泛應用于城市建設、交通規劃、土地確權、國情普查以及地籍調查等多領域[1]。傳統的大比例尺地形圖測繪采用數字測圖技術方法,采用全站儀或RTK 技術進行地物特征點的采集,該方法精度雖然高,但是需要多人配合進行測點及畫草圖,因此有大量的外業工作量并且在特殊地形區域,如懸崖、陡壁等人工開展測繪工作,危險系數極大[2]。隨著無人機技術及計算機技術的發展,無人機在測繪領域應用得越來越廣泛。與專業的測繪無人機相比,消費級旋翼無人機具有機動靈活、成本低、低損耗以及可重復的特點。該文將傾斜攝影測量的五組鏡頭搭載到無人機,搭建無人機傾斜攝影測量平臺,對測區范圍內進行全方位拍攝,建立區域高分辨率三維模型,制作大比例尺地形圖。
1 傾斜攝影測量
1.1 傾斜攝影測量原理
傾斜攝影測量通過5 個鏡頭從不同的角度對測量區域進行拍攝,獲取多角度的區域影像信息。與傳統的攝影測量相比,傾斜攝影測量多了4 個角度的拍攝相片,因此可以獲取地表區域建筑物和構筑物更豐富的側面紋理。無人機在5個角度對地面拍攝的同時,機載GPS 和慣性導航系統同時記錄飛機在拍攝照片的瞬時位置和姿態組成POS 數據,與地面布設的像控點聯測,通過軟件直接計算地物間的幾何關系,并將最佳的紋理特征貼合到地表,對測區的地形地物重新構建三維模型,獲得高精度的實景三維、DOM、點云數據等[3]。
無人機傾斜攝影測量的優勢包括以下3 個方面:1)獲取信息量大,無人機多個鏡頭可獲取地面的垂直影像,還可獲取其他方向的側面照片。2)遮擋少,與傳統的攝影測量相比,對地物可從多個角度觀測,極大地減少地物遮擋。3)三維建模自動化程度高,傾斜攝影測量配套數據處理軟件較為成熟,可高效、高精度地處理影像數據,自動化處理程度高。
1.2 參數設置
傾斜攝影測量雖然應用與傳統的航攝方法不同,但是其基本原理相同,根據攝影測量的方法設置相關參數,對測量成果影響較大。
確定地面采樣間隔。地面采樣間隔是一個像素對應的地面實際尺寸,也就是影像的地面分辨率。根據要求的測圖比例尺大小設置影像地面分辨率采樣間隔,地面分辨率大小與測圖比例尺大小的對應關系見表1。
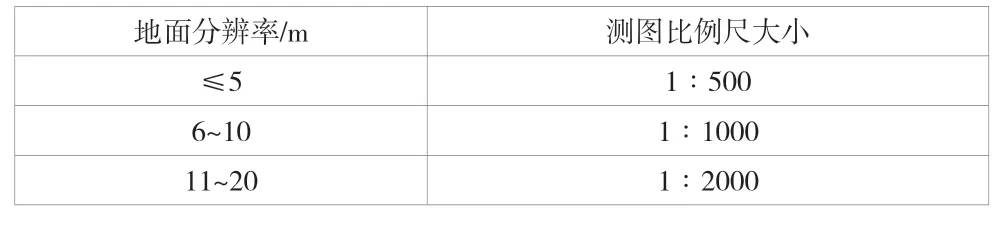
表1 影像地面分辨率與測圖比例尺的對應關系
1.2.1 航高設置
航高即為無人機的飛行高度,分為絕對航高和相對航高兩種,絕對航高是指無人機相對平均海平面的高度,相對航高是指無人機相對測區范圍內的平均高程的高度。無人機飛行航高H與鏡頭參數、地面分辨率之間的關系如圖1 所示。

圖1 無人機航飛參數關系圖
圖1 中,H為無人機飛行相對航高,f為精度焦距,a為像元大小,GSD 為地面分辨率,通過圖1 中各參數的三角關系,相對航高H的計算表達式如公式(1)所示。
式中:H為相對航高;f為焦距;GSD為地面分辨率;a為像元大小。
1.2.2 影像重疊度
影像重疊度是指拍攝的相鄰2 張照片重疊區域的百分比,分為航向重疊度和旁向重疊度2 種。按照攝影測量規范要求,航向重疊度不小于60%,旁向重疊度不小于30%,由于三維模型對地物的紋理拍攝要求較高,因此設置的航向重疊度和旁向重疊度要高很多。
1.3 關鍵技術
1.3.1 空三測量
空三測量是根據像片間的控制點或者同名點重建影像的幾何拓撲關系,采用光束法求解影像的外方位元素,為像片間的精確拼接處理提供高精度參數。空三處理軟件的流程如下[4]:1)導入影像軟件。2)連接點自動匹配。3)剔除粗差。4)自由網構建。5)導入地面控制點。6)區域網平差。
1.3.2 傾斜影像密集匹配
傾斜攝影影像匹配可以將同一地物的多幅影像獲取的信息進行處理,生成高密度的點云數據。當前,常見的傾斜影像匹配算法主要有最小二乘影像匹配算法、多基云多影像匹配算法以及多視立體匹配算法。在完成區域網平差后,通過空三測量獲取外方位元素,使用多視角生產匹配高密度點云數據。在匹配數據的過程中,由于從多個角度對同一地物進行觀測,因此會產生大量的冗余數據,冗余信息可以用于糾正錯誤信息,提高點云精度。
1.3.3 數字表面模型
根據點云數據構建不規則三角網,建立高精度的數字表面模型。由于傾斜攝影測量在不同角度獲取的地物差異較大并且測區上方有樹木遮擋,因此自動建立的數字表面模型會有新的誤差。在自動建立高密度的數字表面模型后,采用濾波處理方法融合不同的匹配單元,減少模型誤差。
1.3.4 映射紋理
將拍攝的照片正確地附在三維模型上的過程為映射紋理,本質為建立二維照片影像與三維立體間的對應關系,將二維平面的顏色計算到三維模型表面。通常采用的映射方法為正向、逆向映射以及兩步映射方法。通過映射紋理,數字表面模型轉變為真彩色模型。
2 實施方案
該文采用 Phantom·4 Pro 多旋翼無人機,該無人機為單鏡頭,可在垂直30°~90°調節鏡頭角度,可根據測區范圍,通過軟件計劃飛行方案,通過多架次、多角度、多方向獲取測區范圍內的傾斜攝影數據。Phantom·4·Pro 多旋翼無人機為消費級無人機,相應的數據處理軟件傾斜攝影測量工作的工作量,該無人機的相關參數見表2。
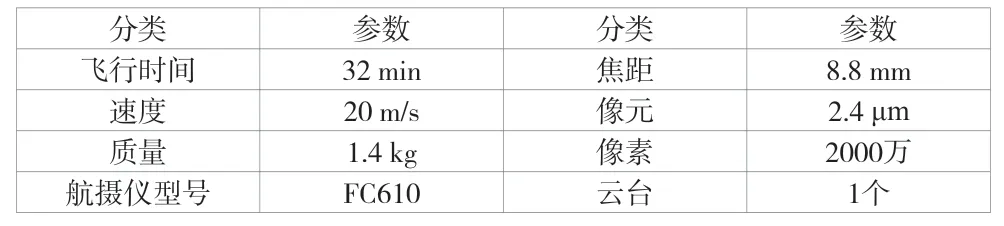
表2 Phantom·4·Pro 參數
飛行控制軟件選擇的是Umap 軟件,該軟件操作在設計航線時可只需對航高、航向、旁向重疊度和航向重疊度等參數進行設置,可自動解算航線間距和拍攝的時間參數,軟件在規劃飛行線路后,將自動估算飛行時間,一次電量滿足18 min以內的飛行,保證飛機順利返航。
2.1 技術路線
2.1.1 外業數據采集
外業飛行任務主要分為5 個步驟:1)確定測區范圍。2)像控點布設。可在谷歌地球軟件上進行設計,布設原則為均勻分布在測區范圍內,在布設時,應盡量選擇在空曠的、具有明確特征的區域布設,如硬化道路拐角、村民的文化活動廣場等區域。3)像控點實地測量。在實地制作地標點過程中,按照事先設計的點位在實地進行部署。采用RTK 技術對部署的點位進行平面控制測量,采用四等水準測量的方法獲取高程值。4)開展外業航飛工作。將測區范圍及布設的控制點坐標輸入umap 飛行控制軟件,無人機的航線會現場規劃,進行航飛。5)數據整理。航飛工作完成后,將無人機存儲的影像信息進行檢查,初步查看影像是否完整,檢查影像質量。
根據測區的實際情況及測區范圍,此次飛行像控點的布設按照航向400 m、旁向400 m 的間隔布設控制點,在測區范圍的4 個邊線中點位置、4 個角點位置以及測區中心位置共計布設35 個像控點。像控點的平面及高程坐標均采用CORS 系統測量獲得。
航飛的高程為970 m,相對航高為310 m,設計的航向重疊度為78%,旁向重疊度設置為70%,設置的攝影基線長度為65 m,航線間距145 m,CGD 為0.7 m。
采用4 種不同密度的像控點對數據進行處理:1)像控點按照航向、旁向均間隔400 m 的距離,共計35 個控制點。2)像控點間距選擇為航向和旁向間距均在800 m~1200 m,共計12 個像控點。3)像控點按照航向和旁向像控點間距分別為1200 m 和800 m,共計9 個像控點。4)像控點航向和旁向間距均為1200 m,共計6 個控制點。
精度分析主要分為2 個方面:一是三維模型的精度分析,二是地形圖的精度分析。地形圖是由三維模型及DOM生產的,因此地形圖的精度依賴三維模型的精度。在測區范圍內,選擇地物特征較為明顯的點作為檢查點,采用CORS系統獲取其平面及高程數據。通過4 種不同的像控點布設方法建立三維模型,在模型上找到同一位置的點坐標作為待檢測點,分別計算4 種控制點計算模式下模型的平面和高程精度。
2.1.2 大比例尺地形圖制作
采用傾斜攝影測量數據制作大比例尺,主要使用是DOM 數據以及三維模型數據。DOM 數據主要用于地物采集,即通過DOM 數據可直接采集地物的范圍線。三維模型數據則用于采集高程線并且在DOM 難以判讀地物時,可通過三維模型中的地物高程進一步對地物進行判讀。
使用南方CASS 軟件進行地物的采集工作。將獲取的DOM 數據批量導出CASS 軟件中,可采用加載光柵插件批量導入,避免分塊導入的缺點。在采集地物的過程中,按照先大后小、先框架后局部的順序進行采集。首先采集的是道路、橋梁、電力線等線狀大范圍數據,其次采集居民地設施、墻柵等地物,最后可采集水系、植被等地物。特別值得注意的是,在實際采集過程中有些地物僅從正射影像中難以判讀具體地物,可打開三維模型進行查看,進一步確定地物類型。
高程要素的采集。采用EPS 軟件進行高程數據的采集。將獲取的三維模型數據轉為EPS 可讀取的Data.dsm 數據格式。在實際采集高程信息時,高程點的采集要貼合地面,不能受到建筑物、植被等具有高度地物的影響。高程點在地形較為復雜的區域采集要密集,在平坦區域采集則可稀疏,在地勢變化區域特征位置需要加密高程點采集,如山脊線、山谷邊緣線、谷底線以及山丘位置等。
2.1.3 圖面整飾
采集地物完成后,將采集的高程點與高程特征線數據插入采集的地物圖中,疊加高程與平面數據,通過高程數據構建DTM 三角網,根據地物特征調整三角網,使三角網盡量貼合地表,修整后的三角網可直接生成等高線。將等高線與三維數據疊加,查看是否超出限差要求,將超出限差范圍的區域圈畫標記,繼續調整三角網使其滿足要求。等高線的修整不僅要滿足限差要求,同時也要滿足美觀的要求。此外,為了方便后期修圖,可以對高程點進行取舍,當采集高程點時,應保證每個格網至少1 個高程點,圖中10 cm×10 cm 的范圍內至少保留15 個高程點并且特殊位置的高程點應注意采集,如山頂高程點、路口高程點、陡坎高和溝底等位置。
為確保圖面美觀,需要進行圖面整飾。首先,對符號壓蓋進行調整,出現道路邊線壓蓋房屋、壓蓋高程點、獨立房屋之間靠的太近、不同地物之間出現壓蓋以及文字注記位置不合適等現象,需要根據圖面進行調整。不同圖幅需要接邊時,也需要仔細對圖面進行調整,使其在滿足精度要求的同時滿足圖面美觀要求。圖2 為通過傾斜攝影測量數據經過地物采集、高程采集以及圖面整飾形成的局部地形圖。

圖2 局部整飾地形圖
3 精度評定
三維模型精度評定的過程中,通過CORS 系統采集的地物點平面坐標可直接用于平面精度評定。將地形圖中15 個對應的地物點坐標與實測地物點坐標進行對比,結果見表3。
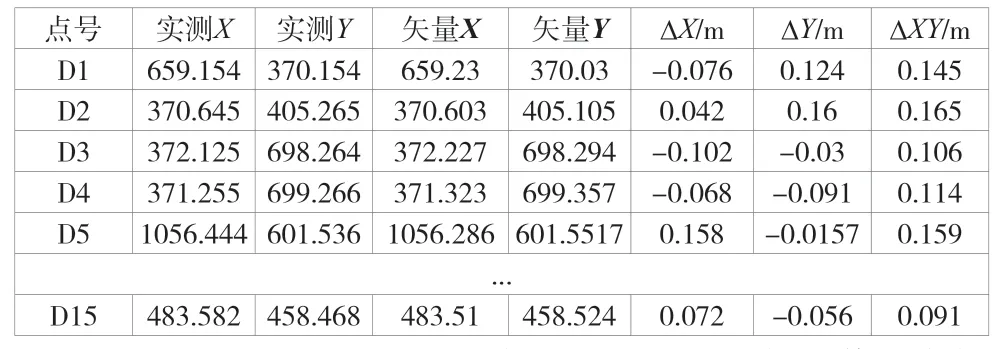
表3 實測值與矢量值差值表
對表3 進行分析,實測點與矢量點平面坐標差值分布較為均勻,在0.22 m 范圍內,平面中誤差最大值為0.129 m,平面坐標限差小于航測對1 ∶500 比例尺地形圖中平面限差0.3 m 的要求。
將等高線高程中誤差進行評定,采用地形圖中的等高線高程與航飛布設的高程點進行對比,結果見表4。

表4 高程中誤差對比結果
表4 共計選取35 個點計算高程差值,得出實測值與地形圖等高線差值最大值為0.252 m,計算高程中誤差為±0.158 m,符合航測規范中對1 ∶1000 比例尺地形圖高程中誤差的限差要求。
4 結論
該文采用消費機單鏡頭旋翼無人機對測區開展傾斜攝影測量工作,對傾斜攝影測量的基本原理及參數關系進行闡述,并對傾斜攝影測量建立三維模型的關鍵技術進行分析。通過實例,獲取傾斜攝影測量數據,建立測區三維模型,并根據DOM 采集地物要素數據,根據三維模型獲取高程要素數據,通過地物數據的平面坐標分析與等高線的高程坐標分析,結果表明,地形圖的精度滿足測量規范要求。通過傾斜攝影測量獲取地形圖提高工作效率,減少外業工作量,為后續大規模地形圖的測制和更新提供參考。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
光學精密工程(2016年6期)2016-11-07 09:07:19
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
核科學與工程(2015年4期)2015-09-26 11:59:03