水稻育秧生產線秧盤播種量智能調控裝置設計與試驗
2023-06-12 04:07:44王承恩劉賽賽王宇唯王曦成劉偉文
農業工程學報 2023年7期
馬 旭,王承恩,劉賽賽,王宇唯,王曦成,趙 旭,劉偉文
?農業裝備工程與機械化?
水稻育秧生產線秧盤播種量智能調控裝置設計與試驗
馬 旭,王承恩,劉賽賽,王宇唯,王曦成,趙 旭,劉偉文
(華南農業大學工程學院,廣州 510642)
水稻工廠化育秧過程中,秧盤播種量的精準控制能有效保證育秧質量。為解決水稻工廠化育秧中秧盤播種量調控操作繁瑣和效率低等問題,該研究設計了一種水稻育秧生產線秧盤播種量智能調控裝置,該裝置以STM32F429微處理器為控制核心,利用雙漫反射光電傳感器檢測連續輸送秧盤的準確到達位置,設計了秧盤質量稱量機構,建立了常規稻和雜交稻芽種秧盤播種量與排種輪電機轉速(頻率)的關系模型,基于統計分析、信息反饋技術與秧盤播種量變化規律模型,實現不同水稻品種秧盤播種量的智能精準調控。試驗結果表明,在500盤/h的生產效率下,裝置的平均檢測精度為94.84%,經調控后的雜交稻秧盤播種量的平均變異系數為2.50%,常規稻秧盤播種量的平均變異系數為4.04%。所設計的水稻育秧生產線智能調控裝置具有較高的播種量檢測精度,滿足當前育秧播種量調控的使用要求,對提高水稻秧盤育秧播種生產線智能化水平、保證秧苗質量具有實際應用價值。
農業機械;水稻;育秧生產線;播種量檢測;智能調控
0 引 言
水稻是主要糧食作物,移栽是國內水稻種植的主要方式。水稻育秧是移栽的關鍵環節[1],水稻育秧播種量的精準控制對提高水稻秧苗質量、栽插質量、產量以及發展水稻生產智能化作業具有重要意義[2-3]。水稻育秧過程中,秧盤播種量的精準控制能有效的保證育秧質量。但水稻品種多,且為芽種播種育秧,種子特性差異較大,很難保證秧盤播種量的精準性,通常在水稻芽種濕度、芽長發生變化時需要人工觀察播種密度進行播量調整或通過實測秧盤播種量進行調整,工作繁瑣且效率低、播種穩定性差,亟需實現播種量的實時智能調控。
目前,播種量檢測與調控技術采用的檢測方法主要有光電法、電容法、圖像法、壓電法和稱量法[4-6]。GRIFT等[7]基于光電法建立了肥料流量與光電傳感器輸出脈寬的關系模型,可完成對施肥量的檢測。高曉燕[8]利用光電法設計了一種油菜變量播種控制系統,采用光纖傳感器和改進排種機構相結合的方法獲得了較高的播種量檢測精度,但檢測系統抗干擾性較差,且通過人工輸入調控參數來完成對播種量的調控,系統智能化水平偏低。周利明等[9-11]基于電容法精準獲取相鄰種子的電容脈沖峰值間隔,通過計算脈沖積分面積得到排種器排種參數,實現對玉米播種量的檢測。陳建國等[12]指出光電法與電容法對同時下落的多粒種子的檢測精度較低,且光電法受外界光線影響較大。譚穗妍等[13]利用機器視覺和BP神經網絡提取超級稻的形狀特征參數,建立BP神經網絡連通區域超級稻數量檢測模型,實現種子粘連重疊部分的檢測。董文浩等[14]設計了一種基于嵌入式機器視覺的播種量檢測和控制裝置,通過圖像處理技術獲取播種量信息并調節播量,可實現對雜交稻低播種量(小于70 g/盤)的實時檢測和調控。但圖像法設備成本較高,易受光照等因素干擾,難以適于露天農田等復雜工況環境,對大播種量下的實時檢測效果較差[15-17]。丁幼春等[18-20]利用PVDF(poly vinyli dene fluoride)壓電薄膜設計了播種量檢測裝置,可獲得漏播、重播和播種量等信息,但壓電傳感器易受振動影響,檢測穩定性較差。有別于常規的播量檢測方法,馬旭[21]發明了利用變速傳送育秧盤來檢測育秧盤播種前、后質量的育秧播種量動態計量裝置,但由于稱量過程中需對秧盤進行加速使得相鄰秧盤之間出現較大間隙,導致大量育秧土壤、水肥藥和種子從間隙處漏出,造成資源浪費。
國內外學者對播種量調控技術的研究也取得了較多成果。美國 Great Plains 公司生產的 Land Pride 蘭德派PS25120型牧草播種機能夠精確控制播種深度和調節排種量,提高了播種效率和牧草質量[22]。李澤輝[23]設計了一種基于電磁振動式排種器的排種量監控系統,基于農機作業速度與排種器兩端電壓的線性規律,通過控制電壓完成對排種量的調整,但農機速度變化時會對排種精度產生影響。鄒貽俊等[24-25]通過建立水稻播種量與其關鍵影響因素間的數學模型設計出水稻播種量的控制系統,調節性能良好,但對于不同品種的水稻需要重新建立模型,系統智能化水平較低。劉浩[26]基于機械攪種充種與氣力吸種技術開發了一種組合可調式水稻精量穴播排種器,實現多級多排量調節,但排種器結構較為復雜,不便于安裝和維護。
綜上,育秧播種量檢測是調控播種機工作參數的先決條件,但光電法、電容法和壓電法存在檢測精度不足和抗干擾性差等問題[27-28],無法進行準確調控。圖像法雖然檢測精度較高,但目前的研究主要適用于雜交稻低播量(小于70 g/盤),無法應用于常規稻大播量(大于80 g/盤)下的播種量準確檢測。稱量法較準確,但浪費育秧資源,需要改進。為此,本文提出一種水稻育秧生產線秧盤播種量智能調控裝置,采用漫反射光電傳感器實時檢測秧盤位置,優化秧盤輸送和稱量結構,實現秧盤無間隔連續輸送條件下秧盤播種量的實時動態精準檢測,并根據檢測結果對播種量進行調控,以保證秧盤播種量恒定。
1 整機結構及工作原理
1.1 智能水稻育秧生產線總體方案
所研制的秧盤播種量智能調控裝置安裝在華南農業大學生產的2ZSB-500型水稻秧盤育秧精密播種生產線上,如圖1所示,改進后的生產線主要包括鋪底土裝置、底土清掃裝置、秧盤播種量智能調控裝置(見圖中虛線框中)、覆表土裝置、表土清掃裝置和淋水裝置,秧盤播種量可根據要求實現智能恒量調控。
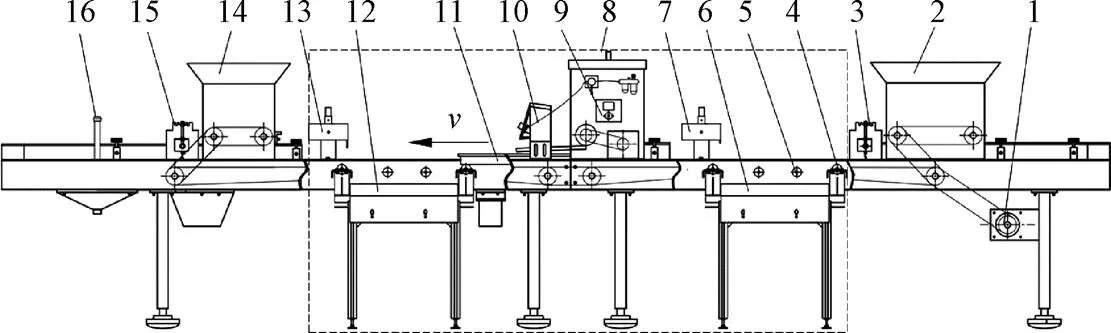
1.電機 2.鋪底土裝置 3.底土清掃裝置 4.支撐輪 5.驅動輪 6.前稱量機構 7.秧盤前位置檢測機構 8.智能調控裝置 9.控制箱 10.振動式精密播種裝置 11.秧盤 12.后稱量機構 13.秧盤后位置檢測機構 14.覆表土裝置 15.表土清掃裝置 16.淋水裝置
1.Motor 2.Subsoil paving device 3.Subsoil cleaning device 4.Support wheel 5.Drive wheel 6.Front weighing mechanism 7.Position detection mechanism in front of seedling tray 8.Intelligent regulation device 9.Control box 10.Vibrating precision seeding device 11.Seedling tray 12.Rear weighing mechanism 13.Position detection mechanism behind seedling tray 14.Topsoil covering device 15.Topsoil cleaning device 16.Water spraying device
注:為秧盤行進速度,m·s-1。
Note:is the speed of the seedling tray travels, m·s-1.
圖1 水稻育秧生產線總體結構示意圖
Fig.1 Schematic diagram of the overall structure of rice seedling raising production line
1.2 秧盤播種量智能調控裝置結構及工作原理
根據秧盤播種量檢測與調控要求,秧盤播種量智能調控裝置主要由秧盤前位置檢測機構、前稱量機構、振動式精密播種裝置、秧盤后位置檢測機構、后稱量機構和控制系統等組成,適用秧盤為常用毯狀硬塑標準秧盤,秧盤尺寸為600 mm×300 mm× 30 mm。
工作時,首先設定秧盤播種量,控制系統根據播量要求控制排種輪電機轉速,隨后輸送秧盤進行播種,鋪完秧盤底土后,秧盤在驅動輪作用下穩定運行到前稱量機構的支撐輪上,此時秧盤前位置檢測機構檢測到秧盤到達,向控制系統發送到位信號,控制系統開始采集并處理稱量數據,得到秧盤播種前質量。秧盤繼續前進,完成播種后,秧盤后位置檢測機構檢測到秧盤到達,獲取秧盤播種后質量。控制系統統計分析前、后兩次秧盤質量得到秧盤播種量,并判定秧盤播種量是否在設定范圍,若在設定范圍,則不調控秧盤播種量;若不在設定范圍,則根據播種量與排種輪電機轉速(頻率)關系,調整排種輪電機轉速達到秧盤播種量在設定范圍以內時停止調整,進而實現對秧盤播種量的智能調控,保證播種量恒定。
2 關鍵部件設計
2.1 稱量機構
前、后稱量機構組成相同,每個稱量機構主要由機架、底板、承重架、支撐輪Ⅰ、支撐輪Ⅱ、質量傳感器、擋泥板、橡膠驅動輪、驅動輪Ⅰ和驅動輪Ⅱ等組成,如圖2所示。
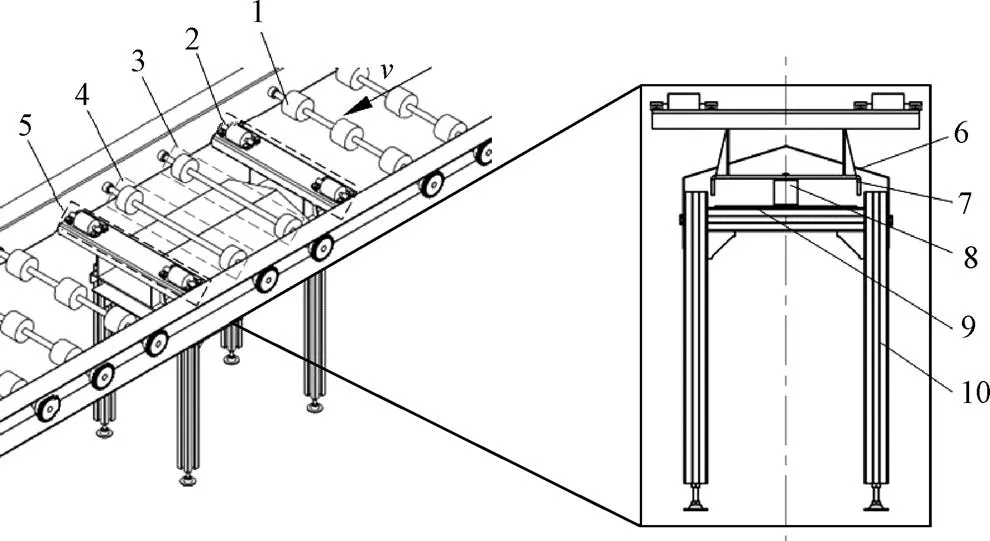
1.橡膠驅動輪 2.支撐輪Ⅰ 3.驅動輪Ⅰ 4.驅動輪Ⅱ 5.支撐輪Ⅱ 6.擋泥板 7.承重架 8.質量傳感器 9.底板 10.機架
工作時,秧盤在驅動輪的帶動下進入支撐輪上進行稱量,因此稱量機構的核心是支撐輪、驅動輪和稱量位置,以保證在動態工作條件下實現秧盤質量的準確檢測。
2.1.1 驅動輪安裝參數確定
如圖3所示,驅動輪安裝位置、直徑、傳動方式和運行速度等均與生產線上橡膠驅動輪相同,2排驅動輪的縱向中心間距為152 mm,每排驅動輪的橫向中心間距為270 mm,直徑為50 mm。為避免驅動輪過寬,在稱量時與秧盤底部加強筋產生干涉,驅動輪寬度為20 mm。此外,秧盤在鋪完底土或播種工序后,受盤內物質重力的作用會產生較小的彎曲形變,秧盤底部的加強筋交錯布置且高度也略有不同,為避免秧盤底部對稱量精度造成影響,將驅動輪由生產線上的每排3個改成2個布置。
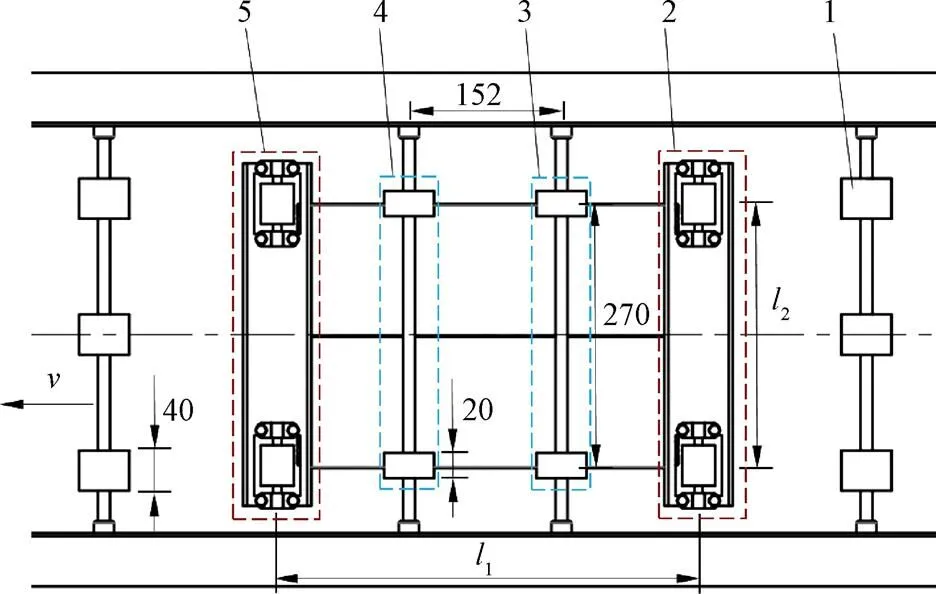
1.橡膠驅動輪 2.支撐輪Ⅰ 3.驅動輪Ⅰ 4.驅動輪Ⅱ 5.支撐輪Ⅱ
1.Rubber drive wheel 2.Support wheel Ⅰ 3.Drive wheel Ⅰ 4.Drive wheel Ⅱ 5.Support wheel Ⅱ
注:1是支撐輪的縱向中心間距,mm;2是支撐輪的橫向中心間距,mm。
Note:1is the longitudinal center distance between support wheels, mm;2is the horizontal center distance between support wheels, mm.
圖3 支撐輪及驅動輪安裝參數示意圖
Fig.3 Schematic diagram of installation parameters in support wheels and drive wheels
2.1.2 支撐輪選型及安裝參數優化
為確保秧盤行進方向不發生偏離,保持平穩行進,每排2個支撐輪的橫向中心間距2與生產線上橡膠驅動輪的中心間距相同,同時,為了減少摩擦選用帶雙頭牙的深溝球軸承作支撐輪。
為保證秧盤稱量的穩定性,2排支撐輪的縱向間距1應大于秧盤長度的一半,但1也不能過大,否則秧盤底部的彎曲形變將增大,稱量時秧盤與驅動輪Ⅰ、Ⅱ產生接觸,對稱量結果產生干擾。為避免接觸,進行不同縱向間距1下秧盤底部長邊的彎曲形變量測量試驗。將支撐輪固定在試驗臺上并調整水平間距,在秧盤中按育秧要求鋪設底土和種子(約3 kg),分別測量秧盤底部長邊的彎曲形變量,試驗選取200個秧盤,結果取平均值,試驗結果如表1所示。
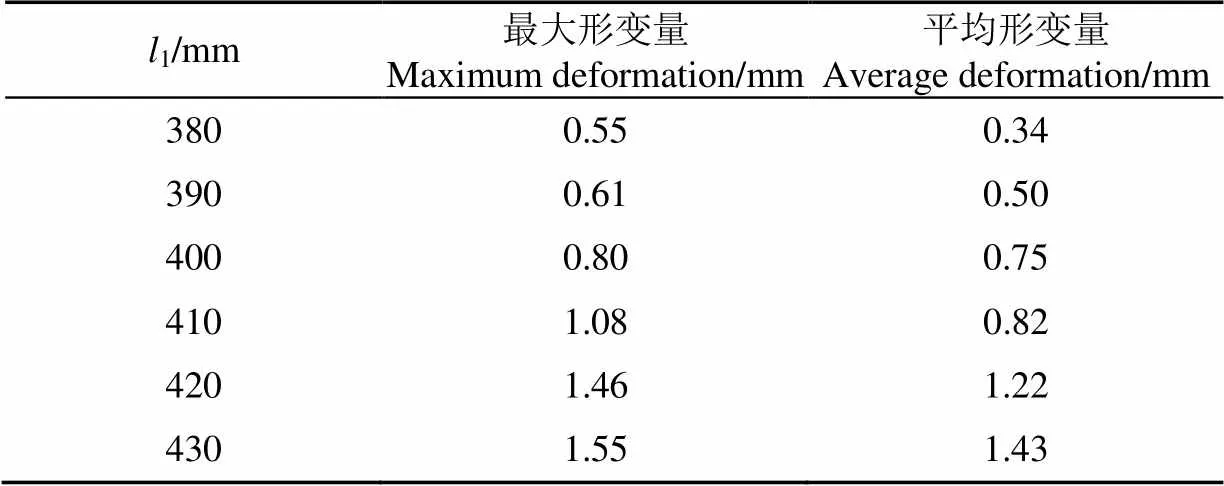
表1 秧盤彎曲形變量測量結果
從表1中可以看出,1越小形變量越小,當1大于400 mm時,秧盤的平均形變量接近或超過1 mm。為確保稱量時秧盤更穩定,根據試驗結果,將2排支撐輪的縱向間距1設為400 mm,此時秧盤形變量不超過0.8 mm,穩定性較好。
2.1.3 驅動輪與支撐輪高度差參數優化
為提高稱量精度,需要確保秧盤在稱量時不與驅動輪及前后相鄰秧盤相接觸,而僅在支撐輪Ⅰ、Ⅱ上。因此,考慮到秧盤的變形和制造誤差等,支撐輪的安裝位置需高于驅動輪的安裝位置,以避免稱量時秧盤與驅動輪接觸,如圖4所示。
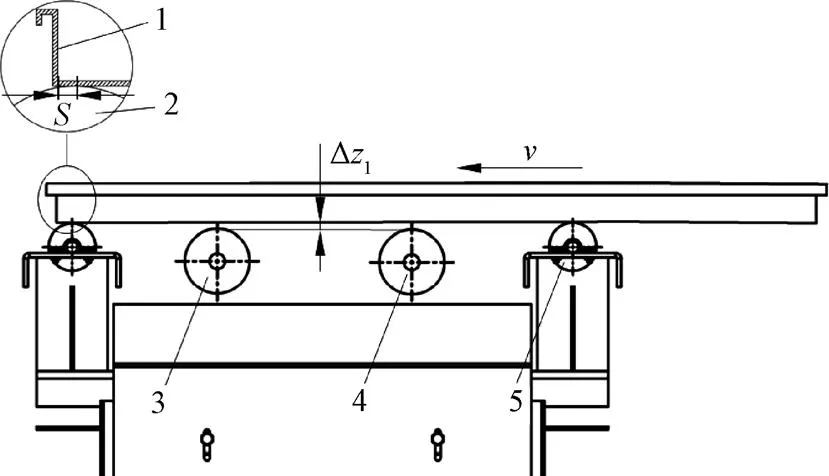
1.秧盤(剖視圖)2.支撐輪Ⅱ 3.驅動輪Ⅱ 4.驅動輪Ⅰ 5.支撐輪Ⅰ
1.Seedling tray (section view) 2.Support wheel Ⅱ 3.Drive wheel Ⅱ 4.Drive wheel Ⅰ 5. Support wheel Ⅰ
注:Δ1為支撐輪和驅動輪的安裝高度差,mm;為秧盤靜止距離(秧盤內壁與支撐輪Ⅱ中心的水平距離),mm。
Note: Δ1is the installation height difference between support wheels and the drive wheels, mm;is static distance of the seedling tray (Horizontal distance between the inner wall of the seedling tray and the centre of the support wheel II), mm.
圖4 支撐輪與驅動輪安裝高度差示意圖
Fig.4 Schematic diagram of installation height difference between support wheels and drive wheels
為選取合適的安裝高度差Δ1,根據秧盤彎曲形變量(表1),分別設計1、2和3 mm的安裝高度差進行高速攝像試驗,分析秧盤在不同Δ1下的運動狀態(攝像機為日本PHOTRON公司生產的FASTCAMSUPER-10K型高速攝影機,試驗時拍攝幀率為500幀/s,像素分辨率為1 024×1 024,并統計秧盤的靜止距離和靜止時長。試驗中連續輸送10個秧盤,每個秧盤中按育秧要求鋪設底土和種子,重復5次,結果取平均值。
試驗結果表明,當Δ1為3 mm時,秧盤明顯減速,秧盤到達支撐輪Ⅱ時需要依靠后面秧盤的推動才能完全上升到支撐輪Ⅱ上,待稱量秧盤與后面相鄰秧盤一直緊密相連,盡管此時待稱量秧盤與驅動輪不接觸,但受后面相鄰秧盤的影響稱量精度不穩定。當Δ1為1和2 mm時,秧盤明顯減速,待稱量秧盤質心通過支撐輪Ⅰ時,秧盤在橡膠驅動輪驅動和重力作用下會繞支撐輪Ⅰ轉動行進,并隨即下落到驅動輪Ⅱ上形成向前加速行進的狀態(圖5a);當稱量秧盤離開驅動輪Ⅱ后沿支撐輪Ⅱ向上運動,并在慣性力作用下減速運動直至完全到達支撐輪Ⅱ上,且能夠在2排支撐輪上保持短暫靜止,同時與前、后相鄰秧盤形成微小間距(圖5b)。當Δ1為1 mm時,因秧盤底部變形、制造誤差等影響,有部分秧盤底部會與驅動輪發生刮蹭,明顯影響稱量精度;當Δ1為2 mm時,秧盤行進過程中始終不與驅動輪發生接觸,此時,秧盤在稱量機構上行進的最遠靜止距離為17.5 mm,平均靜止距離為16.7 mm,最大靜止時長為0.072 s,平均靜止時長為0.062 s。
通過上述試驗可以看出,當安裝高度差Δ1為2 mm時,秧盤在完全到達支撐輪后能保持短暫靜止,且不與驅動輪及前、后相鄰秧盤接觸,為此設定安裝高度差Δ1為2 mm,以確保秧盤在行進過程實現靜態無接觸稱量。
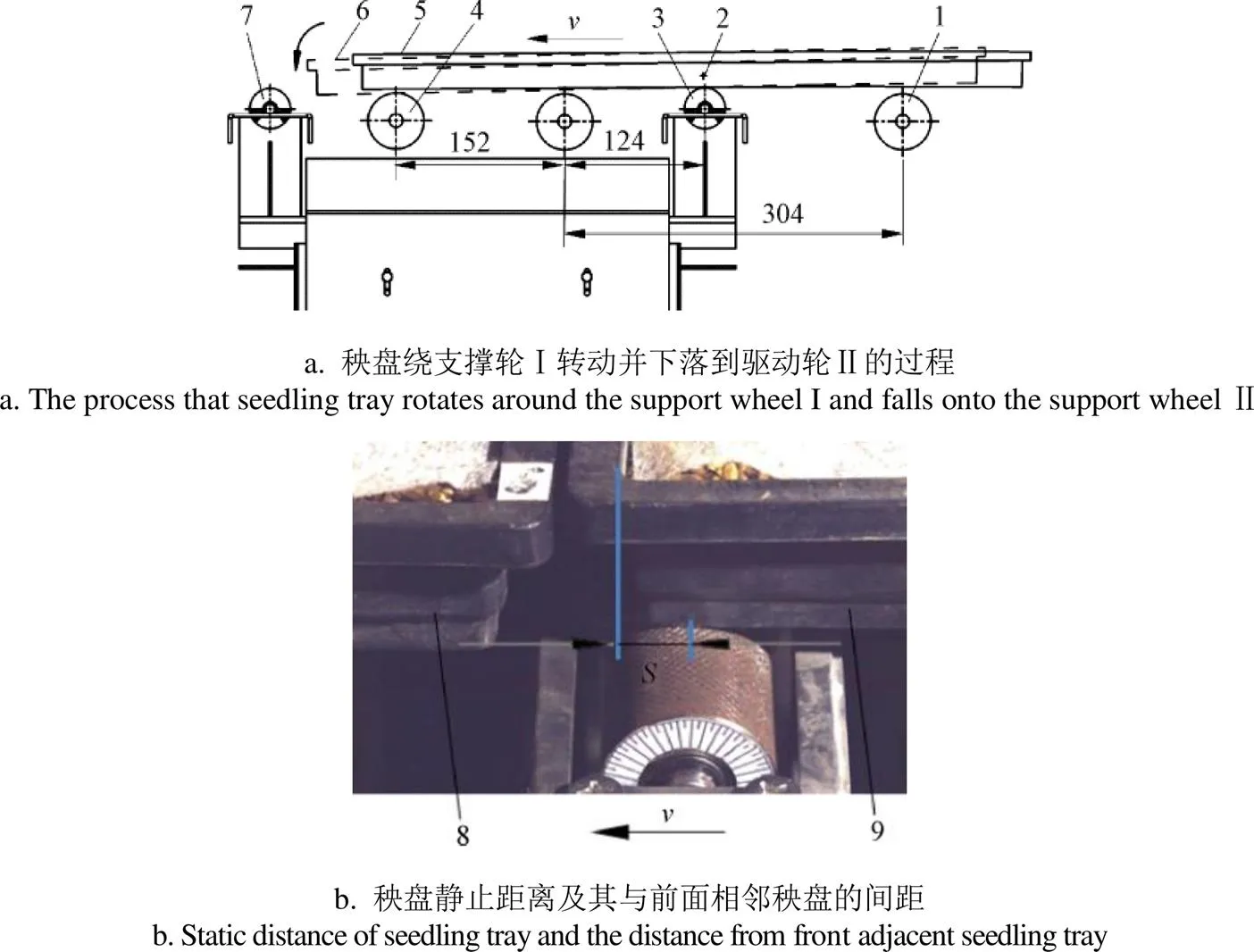
1.橡膠驅動輪 2.秧盤質心 3.支撐輪Ⅰ 4.驅動輪Ⅱ 5.秧盤質心經過支撐輪Ⅰ 6.秧盤即將下落到驅動輪Ⅱ上 7.支撐輪Ⅱ 8.前面相鄰秧盤 9.待稱量秧盤
2.1.4 稱量位置優化
由前述分析可知,當秧盤與支撐輪Ⅱ接觸時,如圖6實線位置,此時由于秧盤上升,秧盤只與支撐輪接觸,而與驅動輪無接觸,隨后秧盤在慣性力作用下向上轉動到達支撐輪Ⅱ上方,如圖6虛線位置,此時秧盤短暫靜止,是稱量的最佳時間。
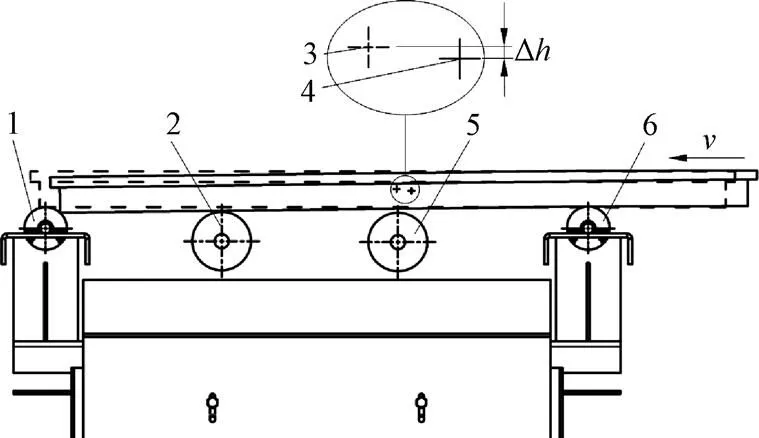
1.支撐輪Ⅱ 2.驅動輪Ⅱ 3.秧盤靜止時的質心位置 4.秧盤剛接觸支撐輪Ⅱ時的質心位置 5.驅動輪Ⅰ 6.支撐輪Ⅰ
1.Support wheel Ⅱ 2.Drive wheel Ⅱ 3.Centroid of the static seedling tray 4.Centroid once seedling tray touches the support wheel Ⅱ 5.Drive wheel Ⅰ 6.Support wheel Ⅰ
注:Δ為秧盤質心的抬升高度,mm。
Note:Δis the lifting height of seedling tray centroid, mm.
圖6 秧盤位置變化過程示意圖
Fig.6 Schematic diagram of seedling tray position change process
為確定秧盤靜止位置,需對秧盤在稱量機構上的位置變化過程進行分析。由于支撐輪為滾動軸承,其自身產生的摩擦損耗和轉動等可忽略不計,故位置變化過程中秧盤動能主要轉化為重力勢能,根據動能定理有:
式中為秧盤質量,kg。
當育秧生產線生產率為500盤/h時,秧盤的行進速度為0.083 m/s;取=9.8 m/s2,帶入式(1)可得Δ約為0.4 mm。此時,秧盤前端可上升2.15 mm,能夠完全到達支撐輪Ⅱ上。
根據2.1.3節的試驗結果,秧盤的最遠靜止距離=17.5 mm,因此將秧盤的稱量位置選在距支撐輪Ⅱ中心17.5 mm處,雖然這個位置可能會因生產率的不同,對秧盤輸送產生的慣性力有所差異,但影響不大。
2.2 位置檢測機構
由于秧盤是連續輸送的,盡管因高度差的作用多數秧盤間會產生微小間距,但由于間距較小,若采用對射式光電傳感器很難識別每個秧盤是否準確到達稱量位置。為此,本文設計了一種無接觸式的秧盤位置檢測機構,主要包括2個漫反射光電傳感器(型號為E18-D80NK,檢測距離3~30 cm)、支撐架、遮光箱和毛刷,如圖7所示。其中,2個漫反射光電傳感器的中心連線與秧盤邊檐平行,毛刷固定在遮光箱上,用于清掃掉秧盤邊檐上的雜物,避免對檢測產生干擾。
1.固定座 2.光電傳感器固定桿 3.漫反射光電傳感器Ⅰ 4.漫反射光電傳感器Ⅱ 5.遮光箱 6.支撐架 7.毛刷 8.秧盤 9.支撐輪
1.Fixed seat 2.Fixing rod of photoelectric sensor 3.Diffuse reflection photoelectric sensor Ⅰ 4.Diffuse reflection photoelectric sensor Ⅱ 5.Blackout box 6.Support frame 7.Hairbrush 8.Seedling tray 9.Supporting wheel
注:為漫反射光電傳感器的檢測距離,cm。
Note:is the detection distance of diffuse reflection photoelectric sensor, cm.
圖7 位置檢測機構剖視圖
Fig.7 Section view of position detection mechanism
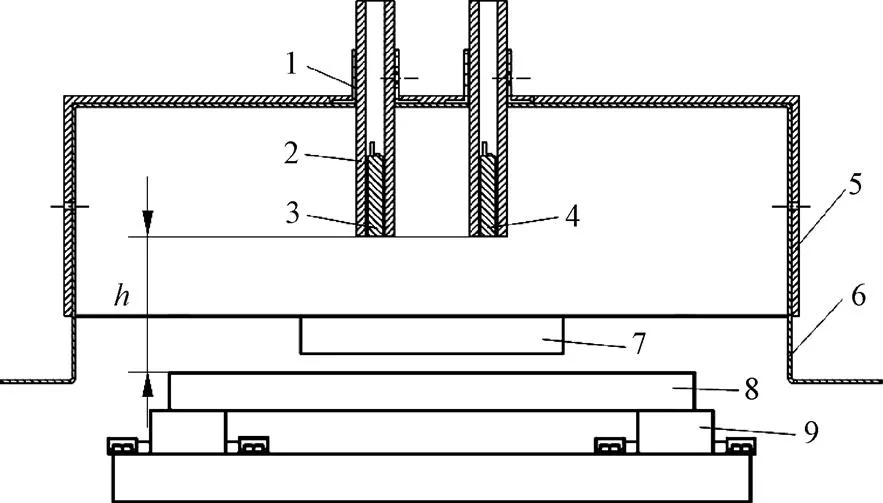
根據育秧農藝要求,鋪完表土之后,秧盤內物料的總高度(底土和種子高度)應小于秧盤邊檐高度(兩者高度差約為10 mm)。如圖8所示。漫反射光電傳感器在檢測距離內持續對秧盤邊檐進行檢測,控制系統通過采集和分析秧盤邊檐的檢測時長獲得秧盤的位置信息。為防止單個光電傳感器檢測到超出秧盤邊檐高度的物體而出現誤檢,當2個漫反射光電傳感器在檢測距離以內同時檢測到秧盤邊檐時開始計時檢測,當秧盤邊檐離開檢測距離以內時結束檢測(如圖8中的、位置),得到單檐的檢測時長s,若在一定的檢測時間內,分別采集到已稱量秧盤和待稱量秧盤單檐有效檢測時長,則預報秧盤已到達稱量位置。
1.已稱量秧盤(剖視圖) 2.秧盤邊檐 3.漫反射光電傳感器 4.待稱量秧盤(剖視圖)
1.Weighing seedling tray completed (section view) 2.Side eave of seedling tray 3.Diffuse reflection photoelectric sensor 4.Seedling tray to be weighed (section view)
注:Δ2為秧盤內物料總高度與秧盤邊檐的高度差,mm;a為檢測起始位置;b為檢測結束位置。
Note: Δ2is the height difference between the object in the seedling tray and the side eave of seedling tray, mm; a is the starting position of detection; b is the end position of detection.
圖8 秧盤邊檐檢測示意圖
Fig.8 Schematic diagram of seedling tray side eave detection
2.2.1 檢測距離
由于光電傳感器自身存在散射,且散射現象會隨檢測距離的增大而增強,造成實際檢測稱量位置與設定稱量位置出現偏差。為了確定漫反射光電傳感器最佳檢測距離,開展稱量位置間距檢測試驗。根據選用的光電傳感器參數,試驗選取不同的檢測距離,采用像素分辨率為1 920×1 080、拍攝幀率為60幀/s的小米手機對檢測過程進行錄像,通過回放錄像統計分析檢測稱量位置與設定稱量位置的偏差,優選出合適的檢測距離。
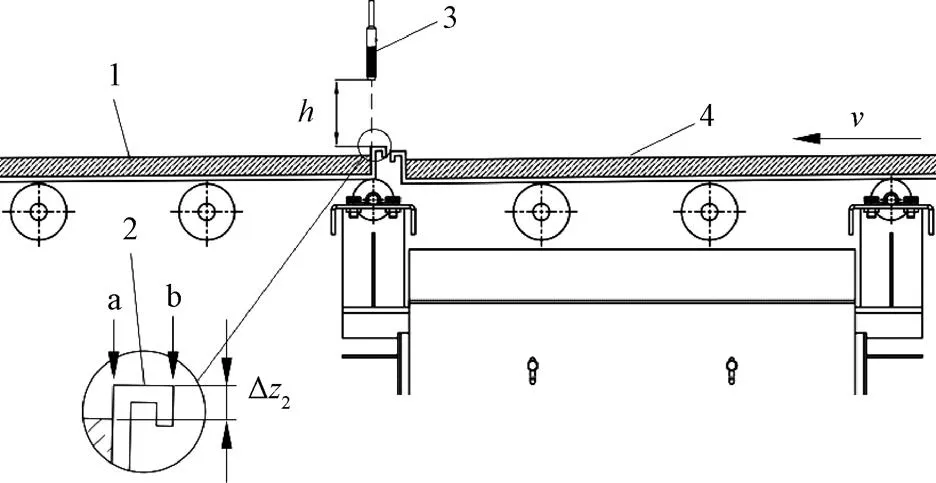
試驗中連續放置50個秧盤,每個秧盤中按育秧要求鋪設底土和種子,為便于觀察,在秧盤中間位置做一條標記線,并在支撐輪Ⅰ、Ⅱ的中間位置做一條標記線,如圖9所示。試驗時通過觀察光電傳感器指示燈的亮度變化判斷檢測是否結束,待檢測結束后測量2條標記線的間距,試驗重復3次,取平均值記為檢測間距,試驗結果如表2所示。
1.秧盤中間位置標記線 2.支撐輪Ⅰ、Ⅱ中間位置標記線
1.Marking line for the middle position of seedling tray 2.Intermediate position marking line for support wheel I and support wheel II
注:為標記線的間距,mm。
Note:is the distance between marking lines, mm.
圖9 稱量位置間距檢測試驗
Fig.9 Weighing position distance detection experiments
由表2可見,隨著檢測距離增加,檢測稱量位置與設定稱量位置間的間距偏差逐漸增加。當檢測距離小于4 cm時,由于檢測距離較短,散射現象較為微弱,稱量位置的檢測誤差也相對較小;當檢測距離大于4 cm時,散射現象逐漸增強,稱量位置的檢測誤差也逐漸變大,此外,根據試驗觀察,當檢測距離小于3.5 cm時,雖然稱量位置誤差檢測較小,但由于檢測距離較短,光電傳感器的檢測靈敏度增強,更易受外界干擾,從而造成誤檢。為避免發生誤檢同時降低傳感器散射影響,檢測距離設為4 cm。
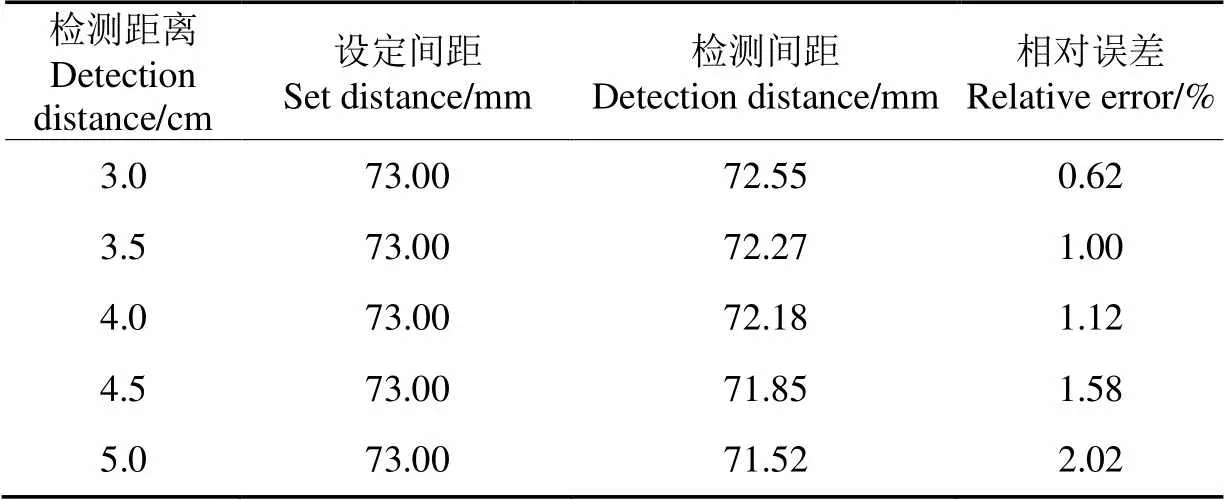
表2 稱量位置間距檢測試驗結果
2.2.2 秧盤到達稱量位置預報
根據秧盤最遠靜止距離,將漫反射光電傳感器安裝在距離支撐輪Ⅱ中心17.5 mm處。結合秧盤到達稱量位置的預報要求,在稱量位置間距檢測試驗的基礎上,進行秧盤邊檐檢測時長試驗。連續輸送100個秧盤,統計分析試驗中獲取的單檐檢測時長和雙檐檢測時長,試驗重復3次取均值,結果如表3所示。
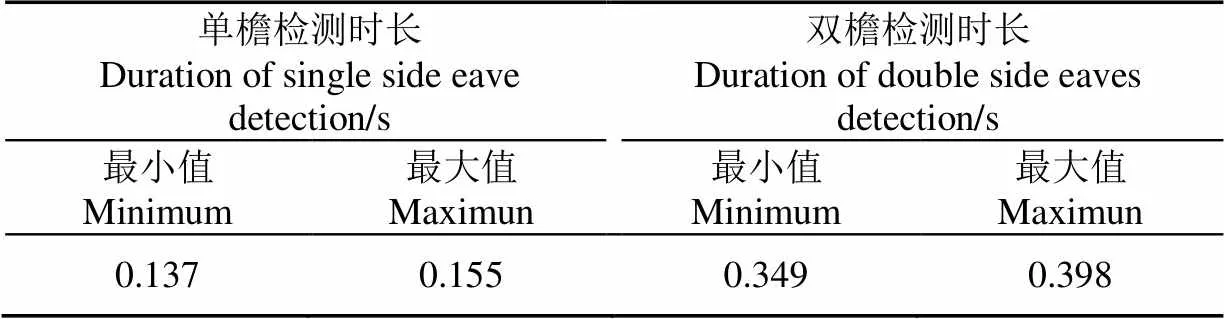
表3 秧盤邊檐檢測時長試驗結果
表3中雙檐檢測時長除包括2個秧盤邊檐的檢測時長外,還包括等待秧盤進入稱量位置的時間間隔,若秧盤連接緊密,則間隔時間較短,檢測時間也較短。實際上,為了在育秧過程中避免育秧土、種子和水肥藥等資源浪費,秧盤均為連續緊密輸送,因此,若雙檐檢測時長<0.398 s則可準確預報秧盤已到達稱量位置。但為了保證系統的實用性,可增加檢測時長以保證部分輸送不連續的秧盤仍能進行稱量檢測,如=4 s,生產率為500盤/h的秧盤行進速度為0.083 m/s,秧盤輸送最大間距為33.2 mm,適用于大多數育秧生產情況。
從表3中可以看出,不同秧盤的單、雙檐檢測時長略有差異,主要是因為部分秧盤的邊檐表面易磨損以及秧盤存在輕微形變和破損,檢測時長略有差異,所以為避免發生漏檢,根據上述試驗及分析將時長閾值設為單檐最小檢測時長的0.8倍,即:
s≥0.8min(2)
式中s為單檐檢測時長,s;min為單檐最小檢測時長,s。當采集到已稱量秧盤和待稱量秧盤單檐檢測時長且式(2)成立時,則預報秧盤已到達稱量位置。
2.3 秧盤播種量調控
振動式精密播種裝置主要通過變頻調速電機帶動排種輪將種子從種箱中分離出來,種子落到氣動排種振種盤上,經勻種后播出。根據文獻[14、29、30]及試驗,該精密播種裝置的電機變頻器輸出頻率(即排種輪轉速)與秧盤播種量之間存在線性關系。因此可建立水稻芽種秧盤播種量與頻率間的線性模型,然后通過調整變頻器的輸出頻率改變排種輪轉速實現播種量調控。
現有水稻品種主要為常規稻和雜交稻,根據農藝要求,雜交稻的播種量為40~80 g/盤,常規稻的播種量通常在80 g/盤以上,傳統育秧通常為100~150 g/盤。近年來,240~360 g/盤播種量的密苗技術已逐漸推廣應用[31]。本文選取泰豐優208、廣8優165和廣8優2156 3種代表性的雜交稻芽種,以及華航51、粵禾絲苗和金農絲苗3種代表性的常規稻芽種作為對象,分別進行芽種物理特性和播種量標定試驗,結果如表4所示(芽長小于1 mm),圖10為試驗標定結果散點圖及擬合線性方程。
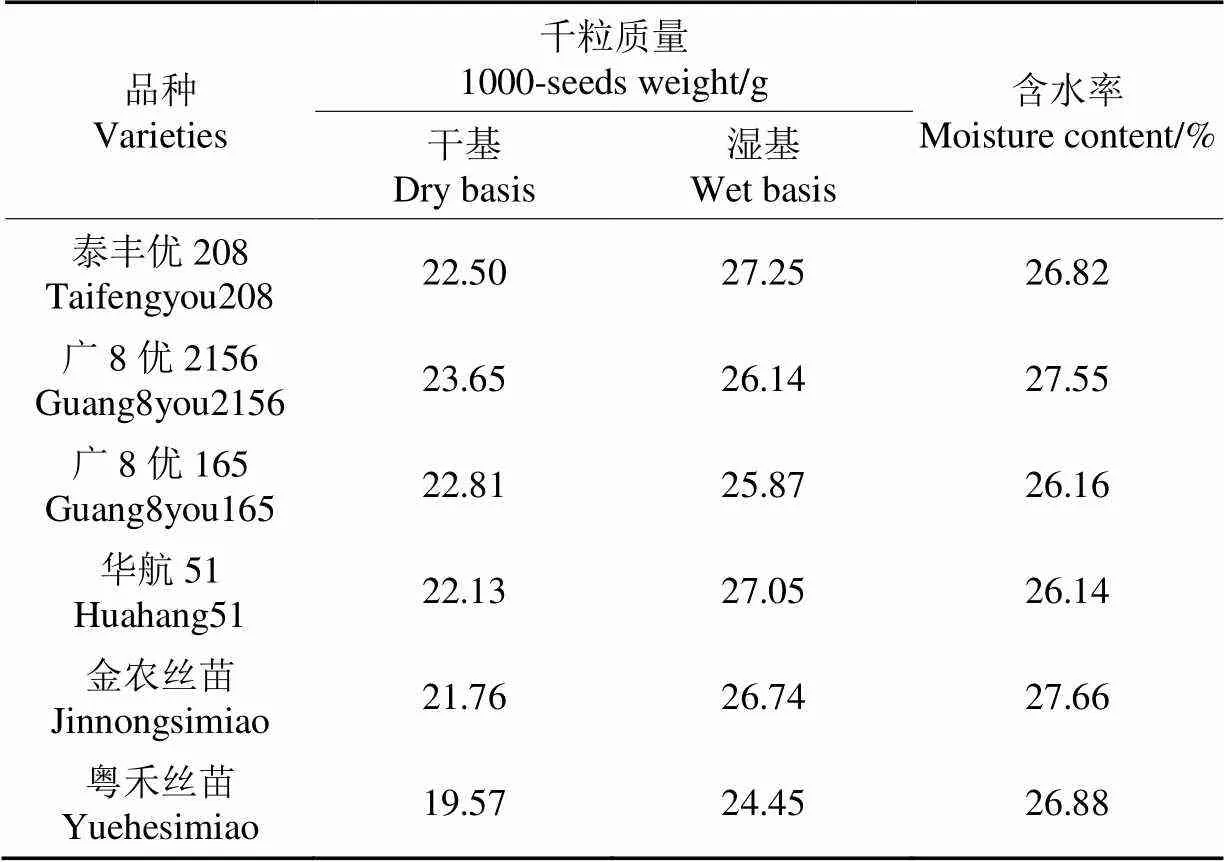
表4 水稻芽種物理特性參數
試驗結果表明,各水稻芽種秧盤播種量和電機變頻器輸出頻率之間的線性關系良好,可依據秧盤播種量和頻率間的線性規律修正電機變頻器輸出頻率,實現對秧盤播種量的調控,調控方程如下:

式中F為修正后的頻率,Hz;F為修正前的頻率,Hz;為設定的秧盤播種量,g/盤;Q為秧盤播種量測量值的均值,g/盤;為修正系數。
修正系數是調控秧盤播種量的調控參數,其大小為水稻芽種秧盤播種量與電機變頻器輸出頻率擬合線性方程斜率的倒數。各水稻芽種秧盤播種量的修正系數如表5所示,從表5可知,相同種類的水稻芽種的修正系數較為接近,因此,為優化播種量調控設計,取3種雜交稻修正系數的均值和3種常規稻修正系數的均值分別作為雜交稻和常規稻的設定修正系數,即雜交稻的設定修正系數為0.104;常規稻的設定修正系數為0.128。
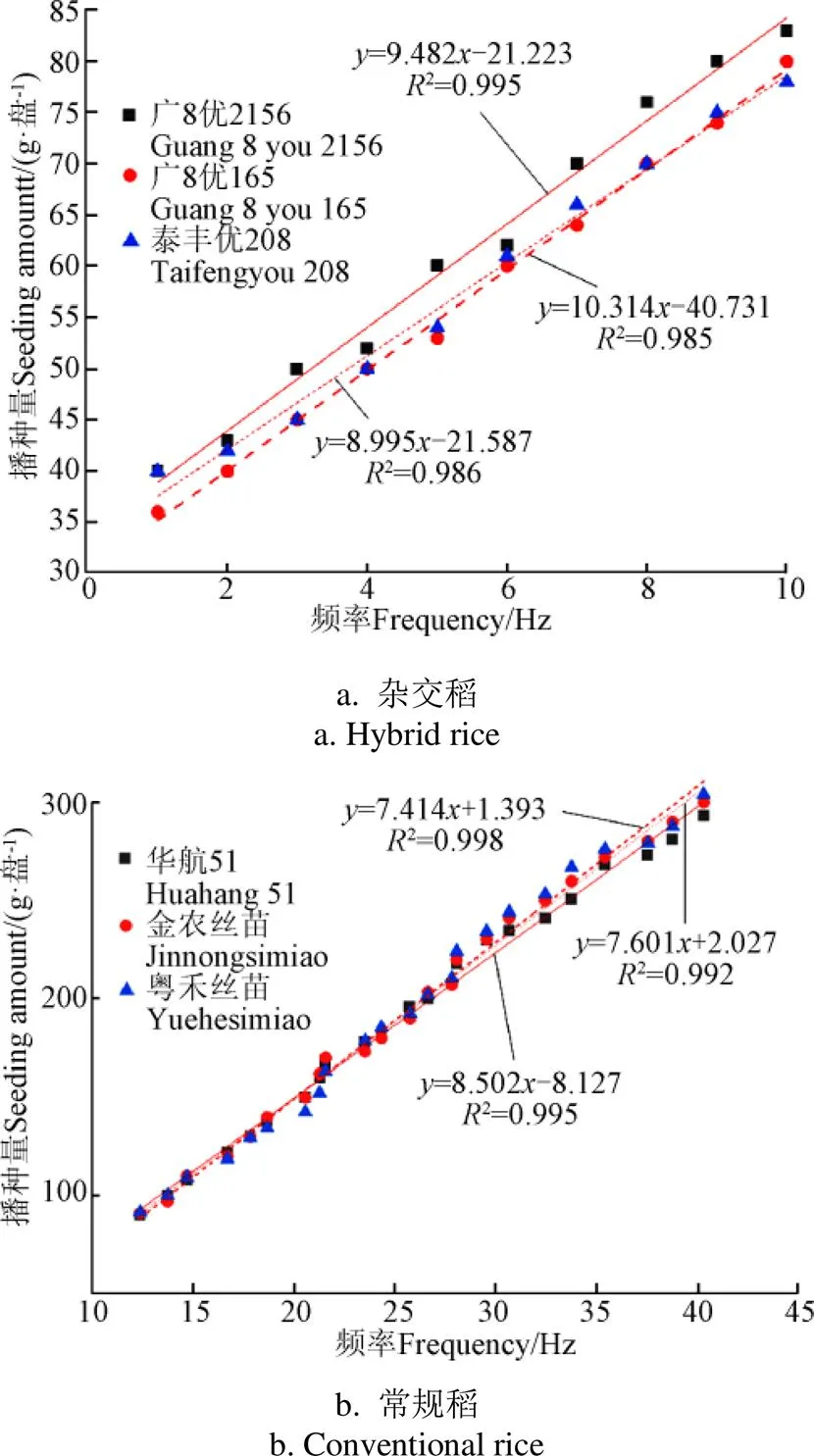
圖10 水稻芽種秧盤播種量與電機輸出頻率標定結果
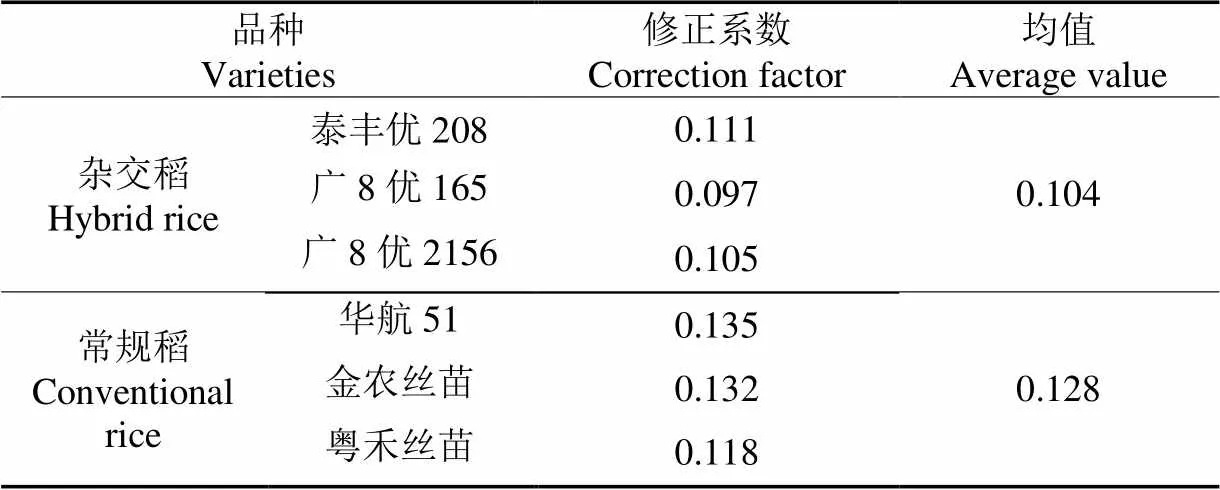
表5 水稻芽種秧盤播種量修正系數試驗結果
2.4 控制系統設計
2.4.1 系統硬件
采用STM32F429微處理器作為控制系統的核心,處理器主頻為180 MHz,內置1 MB閃存,具有12個16位定時器、2個32位定時器、3個12位ADC、3個12位DAC以及176個通用引腳;選用HX711稱量模塊,該模塊的數據傳輸速率為80 Hz,單個數據的處理時間小于0.013 s,滿足在最短靜止時間內對稱量數據的處理;根據稱量精度的需求,選用量程為20 kg的L6N型質量傳感器,稱量精度為0.02%;為減小變頻器產生的雜波干擾各傳感器的輸出信號,在處理器和變頻器之間接入隔離放大模塊,確保信號傳輸穩定無誤;選用檢測精度較高的E18-D80NK型漫反射光電傳感器檢測秧盤的行進位置。控制系統硬件組成如圖11所示。
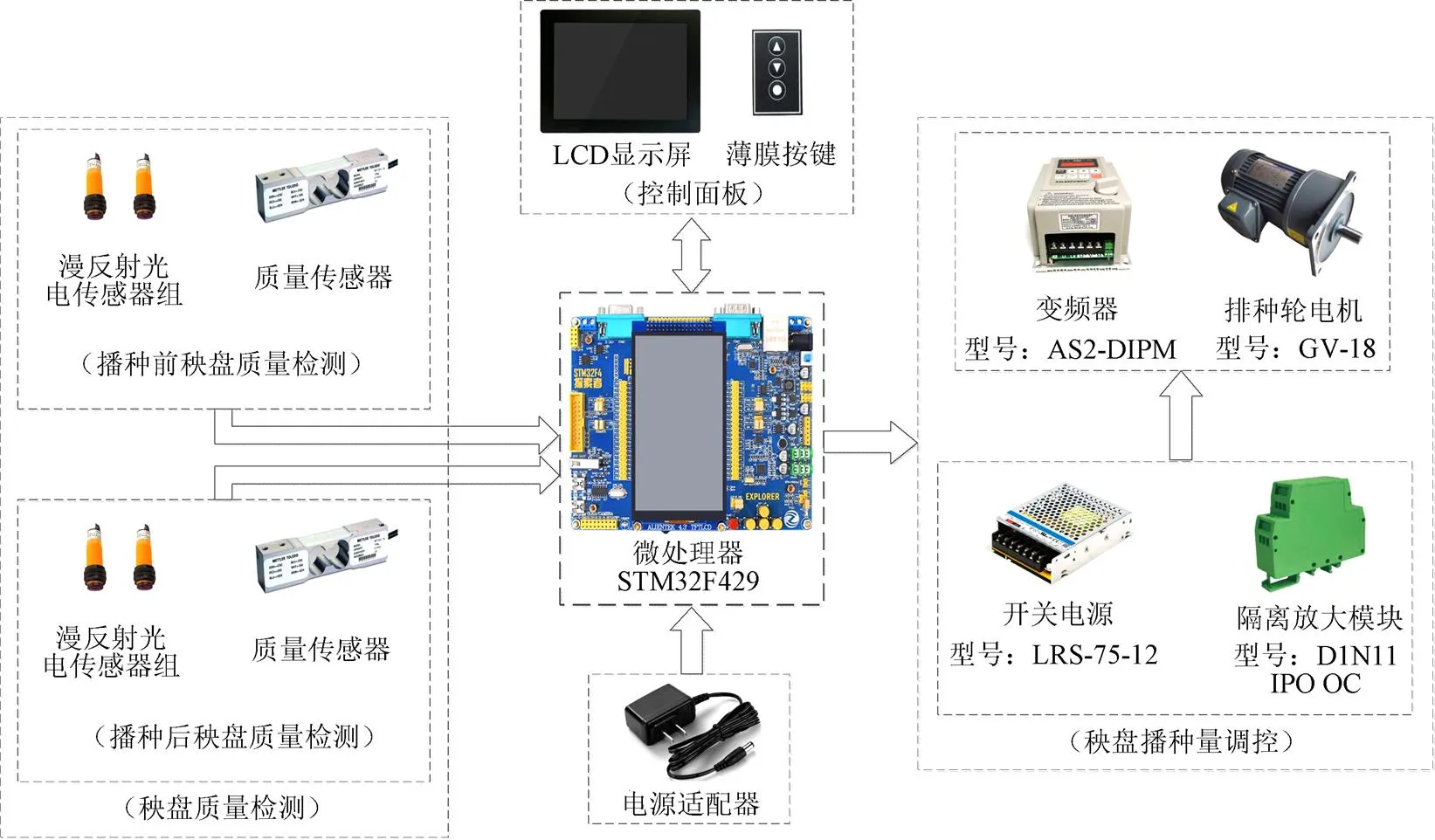
圖11 控制系統硬件組成
2.4.2 系統軟件設計
秧盤播種量智能調控裝置控制系統主要完成秧盤質量檢測和播種量調控。系統軟件控制流程如圖12所示。
開啟系統并設定秧盤播種量后,當采集到滿足條件的檢測時長時,控制系統預報秧盤已到達前稱量位置,并進行稱量得到秧盤播種前質量,秧盤繼續前進,當預報秧盤到達后稱量位置時再次稱量得到秧盤播種后質量,隨后計算并統計秧盤播種量測量值:
式中為秧盤播種前質量,g;為秧盤播種后質量,g;為秧盤播種量測量值,g/盤。
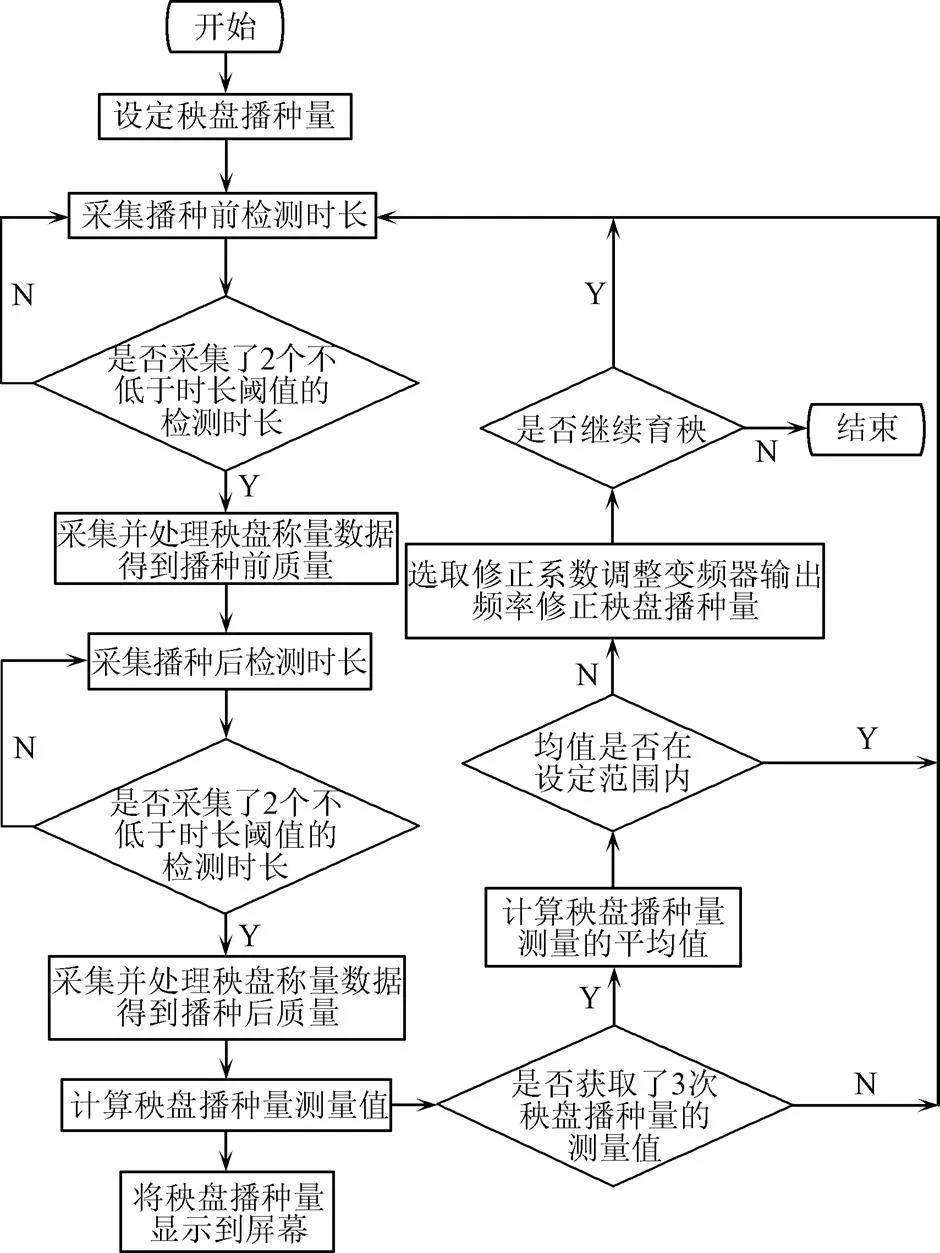
圖12 軟件控制流程
為提高對播種量調控的準確性,以連續檢測到的3個秧盤播種量測量值的平均值作為播種量的調控依據。
式中Q為秧盤播種量測量值的均值,g/盤。
為避免由于檢測誤差而引起的頻繁調控,結合育秧播種農藝要求,若秧盤播種量測量值的均值與設定秧盤播種量的差值超過設定秧盤播種量的10%(保證插秧時秧苗密度和每穴栽插苗數一致),則需要調控播種量,即:
式中Q為設定的秧盤播種量,g/盤。
最后,根據設定的秧盤播種量選取對應品種的設定修正系數帶入式(3),計算出修正后的電機變頻器輸出頻率并改變排種輪電機的轉速,使秧盤播種量調整到設定范圍內。
3 系統性能試驗與結果分析
3.1 試驗材料
試驗地點在華南農業大學工程學院農業工程樓。樣機安裝在華南農業大學研制的2ZSB-500型水稻秧盤育秧精密播種生產線上。分別選用3種常規稻和3種雜交稻的芽種進行秧盤播種量調控試驗。試驗用底土由廣東生升農業有限公司生產的基質與稻田沙壤土等比例混合而成,并經過粉碎處理和5 mm網篩過濾。根據農藝要求,試驗前在每個秧盤中鋪設厚度18~20 mm的底土。試驗裝置及試驗現場如圖13所示。
3.2 秧盤播種量檢測試驗
育秧生產線的生產率為500盤/h,分別進行雜交稻廣8優165芽種低播量(50 g/盤)、常規稻華航51芽種大播量(120 g/盤)和密苗育秧超大播量(300 g/盤)下的秧盤播種量檢測試驗。每次試驗選取100個秧盤,重復3次取平均值(使用精度為0.01 g的電子秤測量每盤的實際播種量),秧盤播種量檢測精度的計算式為
式中1為檢測秧盤播種量,g/盤;0為實際秧盤播種量,g/盤。
1.水稻育秧生產線 2.前稱量機構 3.秧盤前位置檢測機構 4.控制箱 5.后稱量機構 6.秧盤后位置檢測機構
1.Rice seedling raising production line 2.Front weighing mechanism 3.Position detection mechanism in front of seedling tray 4.Control box 5.Rear weighing mechanism 6.Position detection mechanism behind seedling tray
圖13 試驗現場
Fig.13 Experimental site
試驗結果如表6所示。由表6可知,秧盤播種量的平均檢測精度為94.84%,對300 g/盤的平均檢測精度最高,為96.15%,對120 g/盤和50 g/盤的平均檢測精度分別為 94.67%和93.71%,可滿足對不同播種量的實時檢測要求。
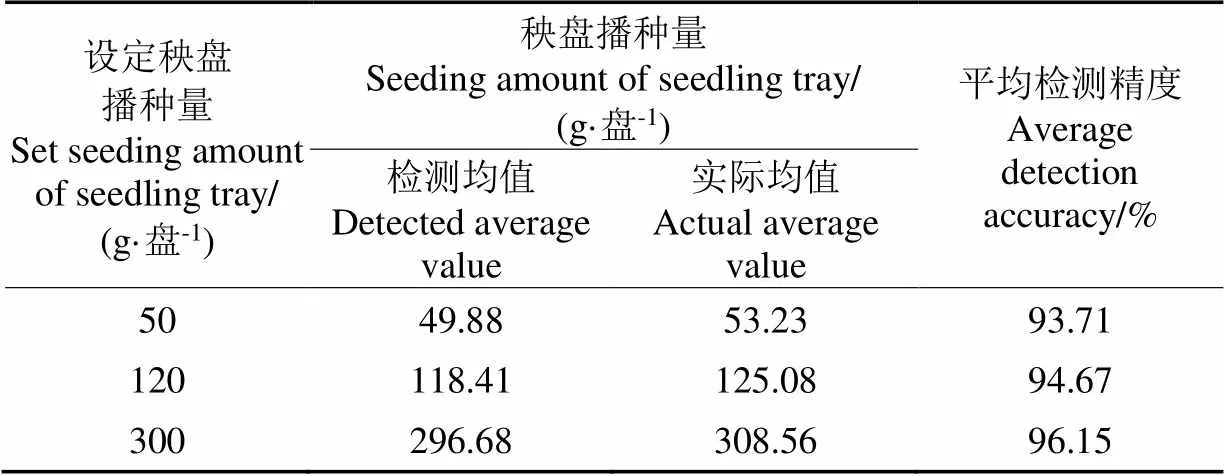
表6 秧盤播種量檢測試驗結果
3.3 秧盤播種量調控試驗
為了檢驗秧盤播種量的調控性能,開展不同品種和播量下的調控試驗。試驗生產率為500盤/h,秧盤完成一次播種的時間為7.2 s,選用華航51、金農絲苗和粵禾絲苗3種常規稻芽種,分別在120和300 g/盤播量下進行播種量調控試驗;選用廣8優165、廣8優2156和泰豐優2083種雜交稻芽種,分別在50和60 g/盤播量下進行播種量調控試驗。每次試驗選取100個秧盤,為了便于分析調控性能,每次試驗選取前35個秧盤中的實際播種量進行秧盤播種量調控過程分析,各品種秧盤播種量調控結果見圖14,試驗結果誤差分析如表7所示。
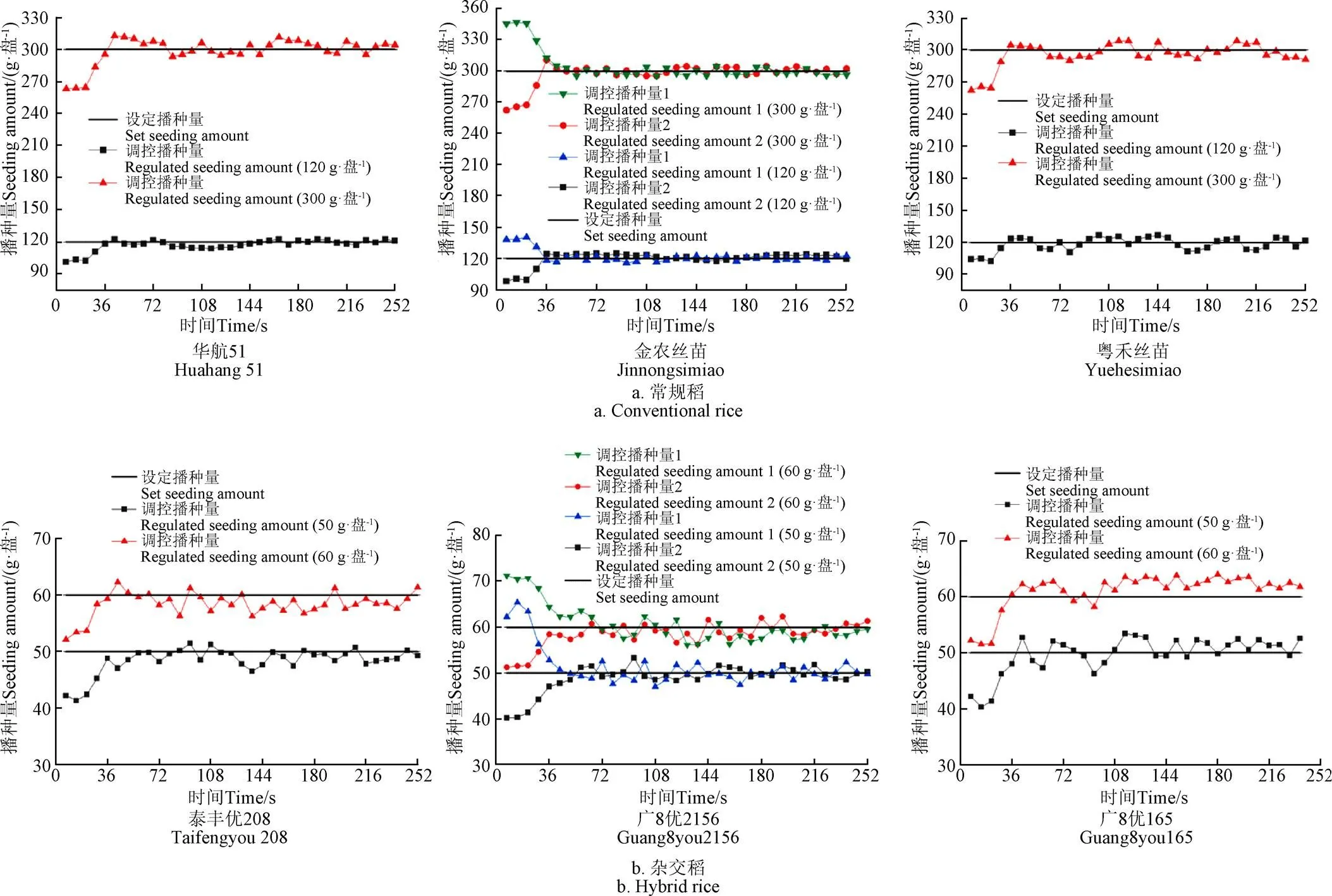
圖14 秧盤播種量調控試驗結果
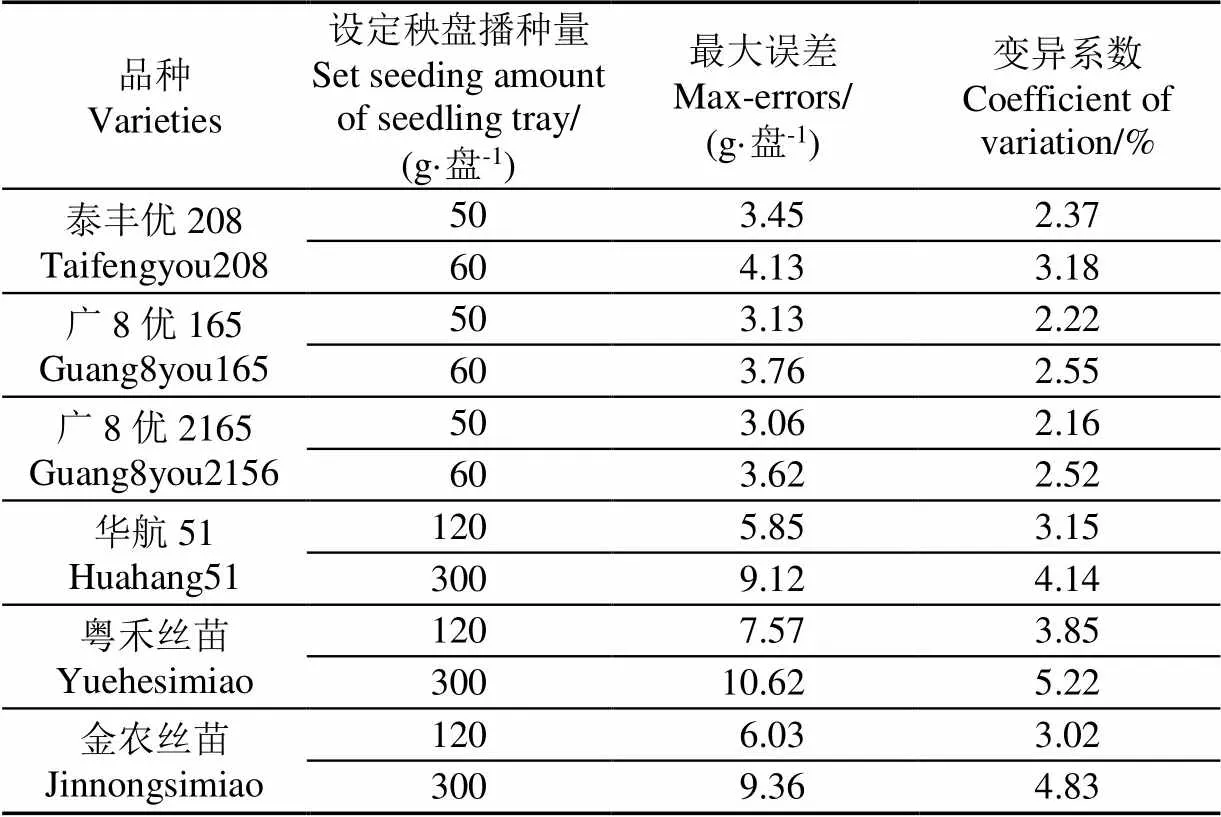
表7 秧盤播種量調控試驗誤差分析
從圖14和表7中可以看出,秧盤播種量經7.2~14.4 s(1~2盤)的系統調控趨于穩定且與設定秧盤播種量的誤差在設定范圍內。調控后,雜交稻秧盤播種量的平均變異系數為2.50%,常規稻秧盤播種量的平均變異系數為4.04%,表明調控后秧盤播種量具有較好的穩定性,滿足育秧播種生產使用的要求。
4 結 論
1)設計了一種水稻育秧生產線秧盤播種量智能調控裝置,能實現對秧盤播種量的實時檢測和智能調控,確保秧盤播種量恒定,為提高秧苗育秧質量奠定基礎。
2)構建了具有安裝高度差的支撐輪和驅動輪相結合的稱量機構,保證稱量時秧盤靜止且與驅動輪以及前、后相鄰秧盤無接觸;根據秧盤邊檐和盤內物料存在的高度差,采用雙漫反射光電傳感器,通過檢測秧盤邊檐的檢測時長,準確預報秧盤到達稱量位置;建立了水稻芽種秧盤播種量與精密播種裝置的電機變頻器輸出頻率(即排種輪轉速)間的線性模型,基于模型確定了修正系數和調控方程;研制了以STM32F429微處理器為核心的控制系統,實時采集和處理秧盤位置和秧盤播種量測量值等信息,在秧盤動態輸送條件下,可實現對秧盤播種量準確檢測與智能調控。
3)在500盤/h的生產效率下,選取不同的水稻芽種進行了秧盤播種量檢測和調控試驗,試驗結果表明:對秧盤播種量的平均檢測精度為94.84%;在調控后雜交稻秧盤播種量的平均變異系數為2.50%,常規稻秧盤播種量的平均變異系數為4.04%,設計的智能調控裝置具有較高的播種量檢測精度和良好的調控性能,試驗指標滿足水稻工廠化育秧的農藝要求,對提高水稻秧盤育秧播種生產線智能化水平具有實際應用價值。
[1] 李澤華,馬旭,陳林濤,等. 育秧播種密度與取秧面積耦合對雜交稻機插質量和產量的影響[J]. 農業工程學報,2019,35(24): 20-30.
LI Zehua, MA Xu, CHEN Lintao, et al. Effects of coupling of nursing seeding densities and seedling fetching area on transplanting quality and yield of hybrid rice[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(24): 20-30. (in Chinese with English abstract)
[2] 羅錫文,王在滿. 水稻生產全程機械化技術研究進展[J].現代農業裝備,2014(1):23-29.
[3] 李澤華,馬旭,李秀昊,等. 水稻栽植機械化技術研究進展[J]. 農業機械學報,2018,49(5):1-20.
LI Zehua, MA Xu, LI Xiuhao, et al. Research progress of rice transplanting mechanization[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(5): 1-20. (in Chinese with English abstract)
[4] 劉海濤. 稱量式播量監控系統的設計及其信號處理方法的研究[D]. 南京:南京農業大學,2019.
LIU Haitao. Design of the Weighing-Principle-Based Application Rate Measuring-controlling System and Study of the Signal Processing Method[D]. Nanjing: Nanjing Agricultural University, 2019. (in Chinese with English abstract)
[5] 王金武,張曌,王菲,等. 基于壓電沖擊法的水稻穴直播檢測系統設計與試驗[J]. 農業機械學報,2019,50(6):74-84,99.
WANG Jinwu, ZHANG Zhao, WANG Fei , et al. Design and experiment of monitoring system for rice hill-direct-seeding based on piezoelectric impact method[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(6): 74-84, 99. (in Chinese with English abstract)
[6] 趙立新,張曾輝,王成義,等. 基于變距光電傳感器的小麥精播施肥一體機檢測系統設計[J]. 農業工程學報,2018,34(13):27-34.
ZHAO Lixin, ZHANG Zenghui, WANG Chengyi , et al. Design of monitoring system for wheat precision seeding-fertilizing machine based on variable distance photoelectric sensor[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(13): 27-34. (in Chinese with English abstract)
[7] GRIFT T, WALKER J, HOFSTEE J. Mass flow measurement of granular materials in aerial application-part 2: Experimental model validation[J]. Journal of Electronic Packaging: Transactions of the ASME, 2001, 44(1): 27-34.
[8] 高曉燕. 油菜變量播種系統試驗研究[D]. 長沙:湖南農業大學,2011.
GAO Xiaoyan. Experimental Research on Controlling System of Rape Variable Seeding[D]. Changsha: Hunan Agricultural University, 2011. (in Chinese with English abstract)
[9] 周利明,王書茂,張小超,等. 基于電容信號的玉米播種機排種性能檢測系統[J]. 農業工程學報,2012,28(13):16-21.
ZHOU Liming, WANG Shumao, ZHANG Xiaochao, et al. Seeding monitoring system for corn planter based on capacitance signal[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(13): 16-21. (in Chinese with English abstract)
[10] 周利明,李樹君,張小超,等. 基于電容法的棉管籽棉質量流量檢測[J]. 農業機械學報,2014,45(6):47-52.
ZHOU Liming, LI Shujun, ZHANG Xiaochao, et al. Detection of seedcotton mass flow based on capacitance approach[J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(6): 47-52. (in Chinese with English abstract)
[11] 田雷. 基于電容傳感器的玉米精量播種機排種性能檢測系統研究[D]. 大慶:黑龍江八一農墾大學,2018.
TIAN Lei. Research on Monitoring System for Performance of Corn Precision Seeder Based on Capacitance Sensor Seeding[D]. Daqing: Heilongjiang Bayi Agricultural University, 2018. (in Chinese with English abstract)
[12] 陳建國,李彥明,覃程錦,等. 小麥播種量電容法檢測系統設計與試驗[J]. 農業工程學報,2018,34(13): 27-34.
CHEN Jianguo, LI Yanming, QIN Chengjin, et al. Design and test of capacitive detection system for wheat seeding quantity[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(13): 27-34. (in Chinese with English abstract)
[13] 譚穗妍,馬旭,吳露露,等. 基于機器視覺和BP神經網絡的超級雜交稻穴播量檢測[J]. 農業工程學報,2014,30(21):201-208.
TAN Suiyan, MA Xu, WU Lulu, et al. Estimation on hole seeding quantity of super hybrid rice based on machine vision and BP neural network[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(21): 201-208. (in Chinese with English abstract)
[14] 董文浩,馬旭,李宏偉,等. 嵌入式機器視覺的雜交稻低播種量檢控裝置設計[J].吉林大學學報(工學版),2020,50(6):2295-2305.
DONG Wenhao, MA Xu, LI Hongwei, et al. Design of low seeding quantity detection and control device for hybrid rice utilizing embedded machine vision[J]. Journal of Jilin University (Engineering and Technology Edition), 2020, 50(6): 2295-2305. (in Chinese with English abstract)
[15] 車宇,偉利國,劉婞韜,等.免耕播種機播種質量紅外檢測系統設計與試驗[J]. 農業工程學報,2017,33(增刊1):11-16.
CHE Yu, WEI Liguo, LIU Tongtao, et al. Design and experiment of seeding quality infrared monitoring system for no-tillage seeder[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(Supp.1): 11-16. (in Chinese with English abstract)
[16] 譚祖庭,馬旭,齊龍,等. 振流式精密播種裝置種層厚度檢測及控制系統研制[J]. 農業工程學報,2012,28(21):10-16.
TAN Zuting, MA Xu, Qi Long, et al. Detection and control system of seed-layers thickness for vibration-flow precision seeder[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE), 2012, 28(21): 10-16. (in Chinese with English abstract)
[17] LU Caiyun, FU Weiqiang, Zhao Chunjiang, et al. Design and experiment on real-time monitoring system of wheat seeding[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(2): 32-40.
盧彩云,付衛強,趙春江,等. 小麥播種實時監控系統設計與試驗[J]. 農業工程學報,2017,33(2):32-40. (in English with Chinese abstract)
[18] 丁幼春,楊軍強,朱凱,等. 油菜精量排種器種子流傳感裝置設計與試驗[J]. 農業工程學報,2017,33(9):29-36.
DING Youchun, YANG Junqiang, ZHU Kai, et al. Design and experiment on seed flow sensing device for rapeseed precision metering device[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(9): 29-36. (in Chinese with English abstract)
[19] 張曌. 壓電沖擊式水稻穴直播精準實時檢測系統設計與試驗[D]. 哈爾濱:東北農業大學,2019.
ZHANG Zhao. Design and Experiment of Piezoelectric Impact Accurate Real-time Monitoring System for Rice Hill-direct Seeding[D]. Haerbin: Northeast Agricultural University, 2019. (in Chinese with English abstract).
[20] 黃東巖,賈洪雷,祁悅,等. 基于聚偏二氟乙烯壓電薄膜的播種機排種監測系統[J]. 農業工程學報,2013,29(23):15-22.
HUANG Dongyan, JIA Honglei, QI Yue, et al. Seeding monitor system for planter based on polyvinylidence fluoride piezoelectric film[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(23): 15-22. (in Chinese with English abstract)
[21] 馬旭. 一種育秧生產線的秧盤播種量動態計量裝置和計量方法:CN110440886[P]. 2021-3-26.
[22] 杜佳偉,楊學軍,劉立晶,等. 小粒種子精量播種機研究現狀及發展趨勢[J]. 農業工程學報,2017,7(6):9-13.
DU Jiawei, YANG Xuejun, LIU Lijing, et al. Research status and development trend of precision seeder for small seeds[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 7(6): 9-13. (in Chinese with English abstract)
[23] 李澤輝. 電磁振動式排種器排量監控系統設計與試驗[D].太古:山西農業大學,2021.
LI Zehui. Design and Experiment of Displacement Monitoring System for Electromagnetic Vibration Seed Metering Device[D]. Taigu: Shanxi Agricultural University, 2021. (in Chinese with English abstract)
[24] 鄒貽俊. 水稻直播機播量控制系統設計與試驗[D]. 南京:南京農業大學,2014.
ZOU Yijun. Design and Experiment of Rice Planter Seeding Quantity Control System[D]. Nanjing: Nanjing Agricultural University, 2014. (in Chinese with English abstract)
[25] 張書彥. 水稻集排式排種器智能化控制系統關鍵技術研究[D].北京:中國農業科學院,2018.
ZHANG Shuyan. The Research on Key Technology of Rice Centralized Metering Device Intelligent Control System[D]. Beijing: Chinese Academy of Agricultural Sciences, 2018. (in Chinese with English abstract)
[26] 劉浩. 組合可調式水稻精量穴播排種器設計與性能試驗[D]. 武漢:華中農業大學,2022.
LIU Hao. Design and Performance Test of Combination and Adjustable Precision Hill Rice Seeder[D]. Wuhan: Huazhong Agricultural University, 2022. (in Chinese with English abstract)
[27] 王在滿,裴娟,何杰,等. 水稻精量穴直播機播量檢測系統研制[J]. 農業工程學報,2020,36(10):9-16.
WANG Zaiman, PEI Juan, HE Jie, et al. Development of the sowing rate monitoring system for precision rice hilldrop drilling machine[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(10): 9-16. (in Chinese with English abstract)
[28] 丁幼春,王凱陽,劉曉東,等.中小粒徑種子播種檢測技術研究進展[J]. 農業工程學報,2021,37(8):30-41.
DING Youchun, WANG Kaiyang, LIU Xiaodong, et al. Research progress of seeding detection technology for medium and smallsize seeds[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2021, 37(8): 30-41. (in Chinese with English abstract)
[29] 鹿芳媛,馬旭,齊龍,等. 振動式水稻精密播種裝置機理分析與試驗[J]. 農業機械學報,2018,49(6):119-128,214.
LU Fangyuan, MA Xu, QI Long, et al. Theory and experiment on vibrating small-amount rice sowing device[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(6): 119-128, 214. (in Chinese with English abstract)
[30] 鹿芳媛,馬旭,齊龍,等. 基于離散元法的雜交稻振動勻種裝置參數優化與試驗[J]. 農業工程學報,2016,32(10):17-25.
LU Fangyuan, MA Xu, QI Long, et al. Parameter optimization and experimental of vibration seed-uniforming device for hybrid rice based on discrete element method[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(10): 17-25. (in Chinese with English abstract)
[31] 陳新環. 密苗技術在機插秧中的前景分析[J]. 農業開發與裝備,2020(1):135,138.
Design and experiment of an intelligent regulation device for the seeding amount of seedling trays in the rice seedling raising production line
MA Xu, WANG Cheng’en, LIU Saisai, WANG Yuwei, WANG Xicheng, ZHAO Xu, LIU Weiwen
(College of Engineering, South China Agricultural University, Guangzhou 510642, China)
The seeding amount of the seeding tray can determine the quality and productivity in the process of rice factory seedling raising. It is a high demand for the precise control of the seeding amount in the seedling tray, particularly for the simple operation, low labor intensity, and high efficiency. In this study, an intelligent regulation device was proposed for the seeding amount of seeding trays in the rice seedling raising production line. Among them, the STM32F429 microprocessor was used as the control core. The weighing data of the seedling tray was also collected and then processed in the system. The working principle was established for the intelligent regulation and control device of the seeding amount in the seeding tray. The key components were also designed and optimized for the composition of the device. A mass weighing mechanism was developed with the height difference between the support and drive wheels, in order to combine the characteristics of closely spaced seedling trays. The experimental observation of the travel of the seedling tray was carried out to determine the key parameters (such as the installation height difference between the support and drive wheels, and the static distance of the seedling tray). Double diffuse reflectance photoelectric sensors were used to detect the side eave of a continuously moving seedling tray within a set detection distance, according to the height difference between the side eave and the material inside the seedling tray. The control system was used to collect the duration of the diffuse reflectance photoelectric sensor. A duration threshold was set to enable the accurate forecasting of the seedling tray's arrival at the weighing position. The model was then established for the variation in the seeding amount of seedling trays of rice sprouts, in relation to the speed (frequency) of the seeding wheel motor. As such, the seeding amount of seedling trays was regulated for the different varieties of rice sprouts using statistical analysis and information feedback techniques. Therefore, three species of hybrid rice sprouts were selected for the variation pattern of rice sprouts. At the same time, the regular model was further integrated for the same rice varieties, in order to determine the regulation equation of the seeding amount of seeding trays. The correction factor was also set for the different rice varieties. The intelligent regulating device was used to detect and regulate the seeding amount of seeding trays at a production rate of 500 trays/h. Specifically, the average detection accuracy of the seeding amount in the seeding tray was 94.84%, whereas, the average coefficients of variation were 2.50%, and 4.04%, respectively, for the hybrid and conventional rice after systemic regulation. The test results show that better regulation and high detection accuracy were achieved in the intelligent regulation device, which fully met the requirements for the seeding amount control in the rice factory seedling raising production line. The finding can provide practical application to improve the intelligent level of rice seedling raising production line for the high quality of seedling raising.
agricultural machinery; rice; seedling raising production line; detection of seeding amount; intelligent regulation
10.11975/j.issn.1002-6819.202301058
S233.71
A
1002-6819(2023)-07-0036-11
2023-01-12
2023-02-15
廣東省重點研發項目(222022032150100001);國家自然科學基金項目(52175226);廣東省科技廳項目(KTP20210196);現代農業產業技術體系建設專項資金(CARS-01-47)
馬旭,博士,教授,博士生導師,研究方向為現代農業裝備技術。Email:maxu1959@scau.edu.cn
馬旭,王承恩,劉賽賽,等. 水稻育秧生產線秧盤播種量智能調控裝置設計與試驗[J]. 農業工程學報,2023,39(7):36-46. doi:10.11975/j.issn.1002-6819.202301058 http://www.tcsae.org
MA Xu, WANG Cheng’en, LIU Saisai, et al. Design and experiment of an intelligent regulation device for the seeding amount of seedling trays in the rice seedling raising production line[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2023, 39(7): 36-46. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.202301058 http://www.tcsae.org
中國農業工程學會會員:馬旭(E041200004S)
猜你喜歡
青少年科技博覽(中學版)(2022年6期)2022-12-27 19:44:27
今日農業(2021年21期)2021-11-26 05:07:00
軍事文摘(2021年22期)2021-11-26 00:43:51
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
今日農業(2021年14期)2021-10-14 08:35:40
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
文苑(2020年6期)2020-06-22 08:41:52