基于無人船測量系統(tǒng)的水下地形測量研究與應(yīng)用
2023-06-20 09:47:46許成義孫棟張金營陳建忠孫如瑤沈孝永
山東國土資源 2023年2期
許成義 孫棟 張金營 陳建忠 孫如瑤 沈孝永


摘要: 隨著測深技術(shù)、GNSS技術(shù)、高精密傳感器集成化的發(fā)展,無人船測量系統(tǒng)為水下地形測量提供了新的思路。結(jié)合山東省高密市王吳水庫,探討了無人船水下地形測量的作業(yè)流程,通過對比分析,選擇最優(yōu)測線間距獲取數(shù)據(jù),通過差值分析進(jìn)行精度評價(jià),數(shù)據(jù)處理后對成果進(jìn)行展示。研究區(qū)結(jié)果表明,無人船測量系統(tǒng)基于單波束測深在中型水庫中的應(yīng)用是十分理想的,測深數(shù)據(jù)質(zhì)量較好,能夠很好地反映庫區(qū)的水下地形情況,無人船測量系統(tǒng)在水下地形測量中起著重要作用。
關(guān)鍵詞: 無人船測量系統(tǒng);水下地形測量;水庫;單波束測深;差值分析
中圖分類號: P66 ????文獻(xiàn)標(biāo)識碼: A ???doi:10.12128/j.issn.1672 6979.2023.02.007
引文格式: 許成義,孫棟,張金營,等.基于無人船測量系統(tǒng)的水下地形測量研究與應(yīng)用[J].山東國土資源,2023,39(2):50 55.XU Chengyi, SUN Dong, ZHANG Jinying, et al. Study and Application of Underwater Topographic Survey Based on Unmanned Ship Survey System[J].Shandong Land and Resources,2023,39(2):50 55.
0 引言
傳統(tǒng)水下地形測量是通過測深儀和GNSS接收機(jī)固定在船體上,航行到確定方位進(jìn)行測深,測量中受到自然因素和人為作業(yè)的影響,導(dǎo)致作業(yè)量大、工作效率低、危險(xiǎn)性高等。隨著測繪科學(xué)技術(shù)水平的進(jìn)步,人工智能技術(shù)、自動(dòng)化技術(shù)的進(jìn)步,水下測量集成化正在快速發(fā)展,其中GNSS RTK[1]和測深儀的組合是技術(shù)創(chuàng)新的重要窗口。無人船測量系統(tǒng)包含多種高精密傳感器設(shè)備,如單波束測深儀[2]、多波束測深儀[3]、姿態(tài)傳感器等,為水上環(huán)境紛繁復(fù)雜和高危險(xiǎn)性等問題找到了答案,并實(shí)現(xiàn)自動(dòng)化無人駕駛水上測繪,可以準(zhǔn)確、快速獲取水下地形數(shù)據(jù)。水下地形測量數(shù)據(jù)的獲取相較于陸上測量數(shù)據(jù)有著局限性[4],大部分水域的水下數(shù)據(jù)現(xiàn)在仍為空白,無人船測量系統(tǒng)的快速發(fā)展與應(yīng)用將會(huì)填補(bǔ)這個(gè)空白。
1 無人船測量系統(tǒng)
1.1 系統(tǒng)組成
無人船測量系統(tǒng)由船體、動(dòng)力系統(tǒng)、通訊控制系統(tǒng)、定位系統(tǒng)、測深系統(tǒng)和岸邊控制系統(tǒng)組成[5],可高效、準(zhǔn)確地進(jìn)行水下地形測量和數(shù)據(jù)獲取,廣泛應(yīng)用于多種水域測量工作。無人船測量系統(tǒng)構(gòu)成如下。
(1)船體。無人船船體采用高分子聚酯碳纖維材質(zhì),具有自重小、吃水淺、抗風(fēng)浪、防水防塵防腐等特點(diǎn),主要承載各種設(shè)備和傳感器。
(2)通訊控制系統(tǒng)。能夠有效鏈接無人船和岸邊控制系統(tǒng),實(shí)時(shí)傳輸無人船的工作狀態(tài)和采集的數(shù)據(jù)。作業(yè)人員可以通過人工遙控和自動(dòng)航行兩種模式進(jìn)行控制無人船航線。
(3)定位系統(tǒng)。通過GNSS接收機(jī)進(jìn)行定位,可通過軟件實(shí)時(shí)監(jiān)控?zé)o人船的位置,查看無人船航行軌跡。
(4)測深系統(tǒng)。按照作業(yè)要求進(jìn)行水深數(shù)據(jù)的采集,并通過軟件進(jìn)行水深數(shù)據(jù)的處理。
(5)岸邊控制系統(tǒng)。由基準(zhǔn)站、控制軟件、通訊設(shè)備組成。基準(zhǔn)站可自行架設(shè),也可連接衛(wèi)星定位連續(xù)運(yùn)行綜合應(yīng)用服務(wù)系統(tǒng)(CORS);控制軟件包括船體控制軟件和數(shù)據(jù)采集處理軟件;通訊設(shè)備為接收顯示無人船的動(dòng)態(tài)信息提供4G信號。
實(shí)驗(yàn)采用華微6號無人船,華微6號是一款大空間、多搭載、超輕便的全碳身自動(dòng)無人船平臺,標(biāo)配單波束測深儀,標(biāo)準(zhǔn)搭載多波束測深系統(tǒng),集成搭載iLiDAR三維激光掃描儀完成點(diǎn)云數(shù)據(jù)采集。具體無人船參數(shù)如表1所示。
1.2 測量系統(tǒng)基本原理
整個(gè)系統(tǒng)的導(dǎo)航定位采用GNSS RTK動(dòng)態(tài)差分定位原理(圖1)[6],通過架設(shè)基準(zhǔn)站傳輸差分?jǐn)?shù)據(jù)到無人船上的接收機(jī),或直接連接省級衛(wèi)星定位連續(xù)運(yùn)行綜合應(yīng)用服務(wù)系統(tǒng)(CORS),實(shí)現(xiàn)實(shí)時(shí)定位和導(dǎo)航功能。水深測量由安置在船上的單波束測深儀完成,利用回聲定位原理。假設(shè)船上的GNSS接收機(jī)的高程為 HG,測深儀測得換能器到水底面的水深為Hv ,測量時(shí)實(shí)際獲得GNSS接收機(jī)至水面高度及水面至換能器底部高度分別為 Hg、Hd,那么在無人船航行時(shí)任意時(shí)刻位置的對應(yīng)水底點(diǎn)的高程H 可通過式(1)計(jì)算得到:
H=HG-Hg-Hd-(Hv+△H1+△H2) (1)
式中: HG是接收機(jī)測得的高程,△H1是無人船的姿態(tài)改正,△H2 是聲速改正。在實(shí)際航行作業(yè)過程中,受到自然因素的影響,無人船會(huì)產(chǎn)生橫搖和縱搖[5],造成水深數(shù)據(jù)的位置與實(shí)際無人船的位置有誤差,同時(shí)水深數(shù)據(jù)也存在誤差,此項(xiàng)誤差會(huì)隨著水深的增加而增大,導(dǎo)致結(jié)果不準(zhǔn)確。聲速改正是水下測量誤差的主要因素之一,水溫、水質(zhì)、渾濁度等都會(huì)影響聲波在水中的傳播速度,進(jìn)而直接影響測深的精度。因此,使用姿態(tài)傳感器對水深數(shù)據(jù)進(jìn)行改正,確保了無人船測得的水深數(shù)據(jù)的可靠性[7],姿態(tài)改正由系統(tǒng)軟件自動(dòng)完成,每次作業(yè)前利用聲速剖面儀進(jìn)行聲速測量,以反映測區(qū)實(shí)際的聲速變化規(guī)律,測得聲速值后由系統(tǒng)軟件進(jìn)行聲速改正。
2 中型水庫水下地形測量的應(yīng)用
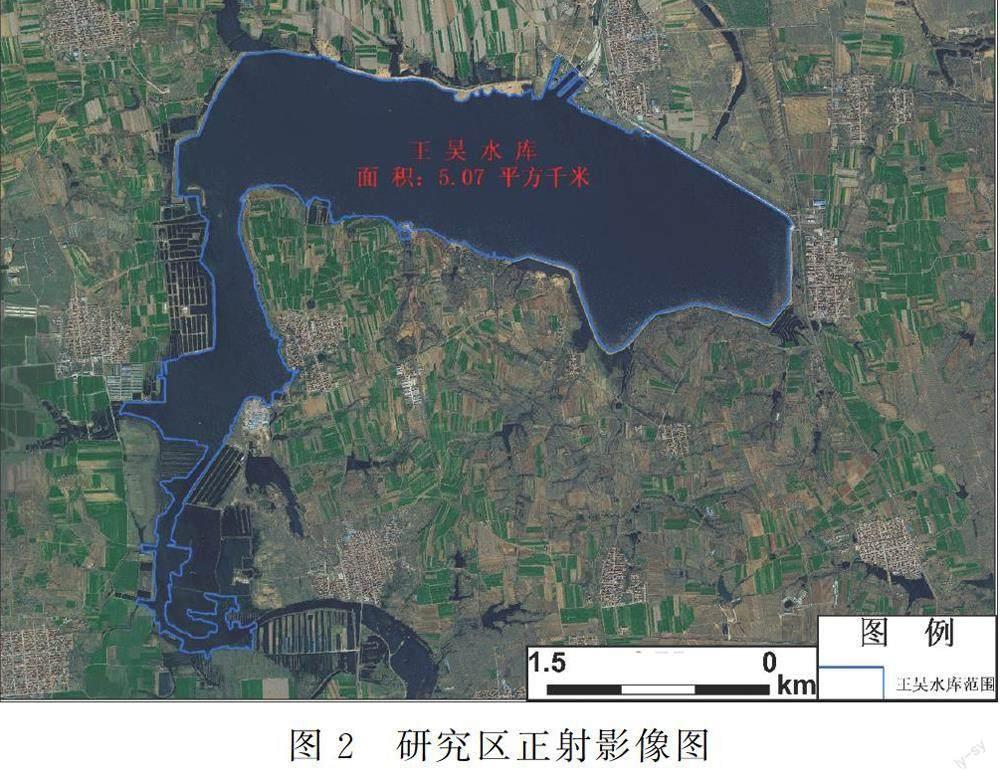
研究區(qū)為王吳水庫,水庫興建于1958年,流域面積344km2,為國家2A級優(yōu)質(zhì)水源地,是一座以防洪為主,兼顧供水、灌溉等綜合利用的中型水庫。其水域面積約5.07km2,是中型水庫中較大的(圖2)。王吳水庫的水下地形數(shù)據(jù)獲取為山東省“十四五”基礎(chǔ)測繪規(guī)劃重點(diǎn)工程內(nèi)容[8],采用華測華微6號無人測量船搭載D230測深儀,配套AutoPlanner、HydroSurvey軟件[9]。
2.1 王吳水庫無人船測深
王吳水庫位于丘陵地區(qū),周圍無高山環(huán)繞,高差不大,導(dǎo)航定位選擇CORS模式。無人船測量與作業(yè)流程見圖3,正式測量前,利用華測E91RTK對近岸水域進(jìn)行測量,將人工測深數(shù)據(jù)與無人船測量數(shù)據(jù)進(jìn)行比對,通過10對位置重疊或位置相近的點(diǎn)比較,得出高程值差值在0.04~0.08m之間,說明無人船測深精度符合要求。
王吳水庫北側(cè)日常管理和維護(hù)較好,無垂釣、漁網(wǎng)等障礙,測量過程中除近岸淺水區(qū)域和個(gè)別死角需要人工控制測量,其余大部分水面用無人船自動(dòng)航行。測線布設(shè)分別采用了垂直測線方向間距10m、20m和30m,平行測線方向間距1m,通過比對10m測線間距滿足精度但是工作量大,30m的測線間距工作量小,但是精度不甚符合,20m的測線間距既符合精度工作量又小,所以最終采用了20m的測線間距。為采集數(shù)據(jù)豐富完整,充分利用無人船測深的優(yōu)勢,在記錄控制設(shè)置中將采樣方式設(shè)置為0.2s的采樣間隔。王吳水庫南側(cè)水面深度較淺,水草、漁網(wǎng)較多,整體需要人工操控進(jìn)行測量。整個(gè)水庫確定范圍內(nèi),北側(cè)作業(yè)環(huán)境良好,每日完成測區(qū)任務(wù)約為0.7km2,南側(cè)作業(yè)環(huán)境較差,需要多次尋找下船地點(diǎn),為保障無人船安全,人工控制測量船速較慢約為1m/s,每日完成測區(qū)任務(wù)約為0.15km2。為保證水上水下數(shù)據(jù)無縫銜接,水庫周邊范圍和無人船無法作業(yè)的區(qū)域需要人工利用RTK進(jìn)行測量。通過無人船水下測量得到的數(shù)據(jù)約為63萬個(gè)(圖4)。
2.2 數(shù)據(jù)處理
完成外業(yè)數(shù)據(jù)采集完成后需要對水深數(shù)據(jù)進(jìn)行初步處理。外業(yè)測量時(shí),無人船航行測量過程中經(jīng)過水下障礙物時(shí),會(huì)導(dǎo)致測深儀測量的數(shù)據(jù)不正確,原始數(shù)據(jù)會(huì)有跳點(diǎn)的現(xiàn)象,點(diǎn)位明顯不合理,要對失真的數(shù)據(jù)進(jìn)行修正。按照規(guī)范要求測深數(shù)據(jù)要以測深模擬信號為依據(jù),如果僅僅得到水深數(shù)據(jù)是不滿足規(guī)范要求的,需要通過將測深模擬信號和水深數(shù)字?jǐn)?shù)據(jù)進(jìn)行疊加,判斷水深數(shù)據(jù)的準(zhǔn)確性[10 11]。通過信號和數(shù)據(jù)的疊加對部分失真數(shù)據(jù)進(jìn)行修正后,軟件會(huì)根據(jù)設(shè)置距離進(jìn)行自動(dòng)取樣,生成htt文件,最后將htt文件合并導(dǎo)出csv格式文件進(jìn)行內(nèi)業(yè)編輯處理。
2.3 精度檢測
精度檢測是質(zhì)量控制的一個(gè)重要過程。本文研究區(qū)采用“等精度觀測”的方式進(jìn)行精度檢測[12],在測區(qū)布設(shè)一定數(shù)量的檢測線,檢測線與主測線相垂直,檢測線的定位點(diǎn)保證與主測線的測深點(diǎn)有重合(圖上1mm范圍)。等精度水深測量完成后,對主測線和檢測線的數(shù)據(jù)分別進(jìn)行預(yù)處理,要求檢查線與主測線的所有規(guī)定范圍內(nèi)的交點(diǎn)都進(jìn)行比較,對無法比較的離散測點(diǎn),要根據(jù)繪制的水下等高線進(jìn)行圖解[13],通過差異進(jìn)行對比分析,是否在誤差精度允許的范圍內(nèi)。
本次實(shí)驗(yàn)水下地形測量檢測線共采集約3萬個(gè)點(diǎn),其中交匯重合點(diǎn)1114個(gè),通過對主測線與檢測線交匯點(diǎn)數(shù)據(jù)進(jìn)行統(tǒng)計(jì)分析[10],計(jì)算標(biāo)準(zhǔn)差。從統(tǒng)計(jì)結(jié)果可知,交匯點(diǎn)最大差值0.30m,最小差值為0m(圖5),主測線與檢測線之間的數(shù)據(jù)偏差小于0.1m的占74.13%,小于0.2m的占95%,小于0.30m達(dá)到100%(圖6),其標(biāo)準(zhǔn)差為0.09m,遠(yuǎn)小于標(biāo)準(zhǔn)限差0.4m。由于交匯點(diǎn)數(shù)據(jù)量較大,只列舉20對交匯點(diǎn)數(shù)據(jù)(表2)。
2.4 無人船水下測量成果
內(nèi)業(yè)處理中,應(yīng)用EPS軟件或者ArcGis軟件生成水下等高線,通過編輯、修改、圓滑等工序完成水下地形圖繪制和相關(guān)測繪成果的制作[14 18],并從細(xì)部展現(xiàn)無人船水下測量成果(圖7)。
3 結(jié)論
本文通過無人船測量系統(tǒng)基于單波束測深儀對高密市王吳水庫進(jìn)行水下地形測量,測量數(shù)據(jù)能真實(shí)有效的呈現(xiàn)水庫的水下地形情況。根據(jù)本次實(shí)際測量成果,無人船測量系統(tǒng)具有以下優(yōu)勢:
(1)無人船可以實(shí)現(xiàn)作業(yè)無人化,自主航行、自動(dòng)避障等,避免了作業(yè)人員在船只上作業(yè),規(guī)避了涉水安全隱患[16]。
(2)集成化程度高,導(dǎo)航定位裝置和測深儀于一體,解決了設(shè)備繁多,連接復(fù)雜的問題,讓作業(yè)更加輕松、高效;機(jī)動(dòng)性強(qiáng),可以測量一些特殊的區(qū)域,像淺水區(qū)、狹窄水域等[14]。
(3)降低了作業(yè)成本,無人船船體小,攜帶方便,減少了租用船只、設(shè)備維護(hù)、人員使用等方面的費(fèi)用。
無人船測量作為一種新技術(shù),目前處于推廣階段,在使用過程中也出現(xiàn)了一些問題[17]。無人船的操控范圍需進(jìn)一步提升,遙控器的控制距離大概在800 m左右,在山丘地形、水庫岸邊參差不平等環(huán)境因素阻斷信號后,控制距離會(huì)進(jìn)一步縮小;無人船動(dòng)力系統(tǒng)馬達(dá)保護(hù)措施需要改進(jìn),馬達(dá)若是被纏繞住,在水中停滯,需要作業(yè)人員進(jìn)入水中處理,增加風(fēng)險(xiǎn),在水草多的區(qū)域,馬達(dá)會(huì)受到阻塞,航行測量效率嚴(yán)重受到影響;無人船電池續(xù)航能力需要提高,在中型水庫測量中,電量基本能夠滿足要求,若是對大型水庫或者湖泊進(jìn)行作業(yè),則很難滿足需求。隨著技術(shù)的不斷改進(jìn)和更新,無人船測量系統(tǒng)將在水下地形測量中發(fā)揮更大作用[18]。
參考文獻(xiàn):
[1] ?丁仕軍,張書華,徐杰,等.Kalman濾波在GPS/BDS組合偽距差分定位中的應(yīng)用[J].山東國土資源,2017,33(10):78 82.
[2] ?牛沖.不同窗口下中值濾波與加權(quán)濾波方法效果分析[J].測繪科學(xué),2021,46(8):21 27.
[3] ?劉經(jīng)南,趙建虎.多波束測深系統(tǒng)的現(xiàn)狀和發(fā)展趨勢[J].海洋測繪,2002(5):3 6.
[4] ?牛沖.基于CORS RTK無驗(yàn)潮的海岸帶水下地形測量精度分析[J].海洋測繪,2021,41(6):36 39.
[5] ?雷添杰,張鵬鵬,胡連興,等.無人船遙感系統(tǒng)及其應(yīng)用[J].測繪通報(bào),2021(2):82 86,92.
[6] ?李維平,方忠旺.基于水域機(jī)器人的水下地形測量系統(tǒng)研究與應(yīng)用[J].北京測繪,2019,33(9):1098 1101.
[7] ?史富貴.水下地形測量成果質(zhì)量檢驗(yàn)若干問題探討[J].測繪科學(xué),2015,40(7):109 112.
[8] ?凌曉春.新型基礎(chǔ)測繪思考與實(shí)踐:以山東省為例[J].山東國土資源,2020,36(3):74 78.
[9] ?袁建飛.無人測量船在水下地形測量中的應(yīng)用研究[J].北京測繪,2017(4):69 72.
[10] ?葉昆平.水下地形測量精度評定的方法研究[J].地理空間信息,2020,18(8):73 75,93.
[11] ?趙建虎,歐陽永忠,王愛學(xué).海底地形測量技術(shù)現(xiàn)狀及發(fā)展趨勢[J].測繪學(xué)報(bào),2017,46(10):1786 1794.
[12] ?文海量,劉志軍.淺談無人船測量系統(tǒng)在水庫地形測量中的應(yīng)用[J].內(nèi)蒙古水利,2021(9):71 74.
[13] ?陳俊任,周曉華.無人船測量系統(tǒng)在水下地形測量中的應(yīng)用[J].測繪技術(shù)裝備,2020,22(1):65 68.
[14] ?梁昭陽.無人船測量系統(tǒng)在水庫地形測量中的應(yīng)用[J].城市勘測,2018(1):132 135.
[15] ?李傳,章繁榮,鄧紅勇.HY1621多波束測深儀的性能分析[J].海洋測繪,2020,40(1):73 78.
[16] ?商建偉.基于GNSS的單波束測深系統(tǒng)在大中型水庫水下地形測量中的應(yīng)用[J].山東國土資源,2022,83(1):65 69.
[17] ?羅旭,石明旺.無人船測量系統(tǒng)在河道水下地形測量中的應(yīng)用[J].城市勘測,2020(4):164 167.
[18] ?高艷.無人船在水下地形測量中的應(yīng)用與探討[J].城市勘測,2019(4):173 175,179.
Study and Application of Underwater Topographic ??Survey Based on Unmanned Ship Survey System
XU Chengyi, SUN Dong, ZHANG Jinying, CHEN Jianzhong, SUN Ruyao, SHEN Xiaoyong
(Shandong Provincial Institute of Land Surveying and Mapping, Shandong Ji'nan 250013, China)
Abstract: ?Accompanying with the development of sounding technology, GNSS technology and high precision sensor integration, unmanned ship survey system provides new ideas for underwater topographic survey. Combining with Wangwu reservoir in Gaomi city in Shandong province, unmanned ship underwater topographic survey process has been studied. Through comparison and analysis, selecting the optimal survey line spacing to obtain data, evaluate the accuracy through difference analysis, and display the results after data processing. It is showed that the application of the unmanned vessel survey system based on single beam bathymetry in medium sized reservoirs is very ideal, the quality of bathymetric data is good. It can well reflect the underwater topography of the reservoir area. The unmanned vessel survey system plays an important role in underwater topographic survey.
Key words: ?Unmanned ship survey system; underwater topographic survey; reservoir; single beam sounding; difference analysis