可感知通信質(zhì)量的中繼通信機(jī)器人
2023-06-21 19:20:21陳永波張家強(qiáng)肖宇峰張佳雯
現(xiàn)代信息科技 2023年9期
陳永波 張家強(qiáng) 肖宇峰 張佳雯
摘? 要:針對(duì)復(fù)雜環(huán)境下移動(dòng)機(jī)器人可靠作業(yè)需求,結(jié)合機(jī)器人自主導(dǎo)航、網(wǎng)絡(luò)測(cè)量、通信組網(wǎng)等技術(shù),設(shè)計(jì)可感知作業(yè)環(huán)境通信質(zhì)量的中繼通信機(jī)器人,為機(jī)器人調(diào)度、任務(wù)規(guī)劃提供依據(jù)。主要內(nèi)容包括:設(shè)計(jì)移動(dòng)中繼機(jī)器人,增強(qiáng)作業(yè)機(jī)器人與控制臺(tái)之間通信質(zhì)量;設(shè)計(jì)通信質(zhì)量感知的地圖構(gòu)建方法,實(shí)現(xiàn)機(jī)器人作業(yè)環(huán)境通信質(zhì)量的可視化;設(shè)計(jì)通信中斷自恢復(fù)機(jī)制,實(shí)現(xiàn)通信中斷情況下機(jī)器人的自主返回與通信連接恢復(fù)。
關(guān)鍵詞:移動(dòng)中繼;自主導(dǎo)航;通信質(zhì)量感知;通信中斷自恢復(fù)
中圖分類號(hào):TP242;TN92 文獻(xiàn)標(biāo)識(shí)碼:A 文章編號(hào):2096-4706(2023)09-0192-04
Abstract: Aiming at the demand for reliable operation of mobile robots in complex environments, this paper combines technologies such as autonomous robot navigation, network measurement and communication networking to design relay communication robots that can perceive the communication quality of the operating environment and provide a basis for robot scheduling and mission planning. The main contents include designing a mobile relay robot to enhance the communication quality between the operating robot and the console, designing a map construction method for communication quality perception to realize the visualization of the communication quality of the robot's operating environment, designing a self-recovery mechanism for communication interruption to realize the robot's autonomous return and communication connection recovery in case of communication interruption.
Keywords: mobile relay; autonomous navigation; communication quality perception; communication failure self-recovery
0? 引? 言
近年來,機(jī)器人的應(yīng)用領(lǐng)域不斷擴(kuò)展,人們希望通過機(jī)器人來處理復(fù)雜煩瑣的任務(wù)。但對(duì)于許多復(fù)雜任務(wù),單個(gè)機(jī)器人無法獨(dú)立完成,需要多個(gè)具備不同功能的機(jī)器人協(xié)調(diào)合作才可以完成任務(wù)。由于多機(jī)器人系統(tǒng)包括很多不同功能的機(jī)器人,整套機(jī)器人系統(tǒng)需要不間斷地進(jìn)行數(shù)據(jù)交換來確保系統(tǒng)的正常工作,一旦出現(xiàn)通信中斷,整套機(jī)器人系統(tǒng)都將受到影響,所以保證多機(jī)器人系統(tǒng)的通信質(zhì)量成為重中之重。
多機(jī)器人通信是建立在無線通信的基礎(chǔ)上,國內(nèi)的研究已經(jīng)取得了一定的積累。浙江大學(xué)工業(yè)控制實(shí)驗(yàn)室提出了一種多覆蓋算法,在滿足不同覆蓋質(zhì)量的基礎(chǔ)上考慮了多目標(biāo)覆蓋和區(qū)域覆蓋,不過該方法只考慮理想通信環(huán)境下的解決方案;沈陽自動(dòng)化研究所針對(duì)無線網(wǎng)絡(luò)節(jié)點(diǎn)控制問題,研究了網(wǎng)絡(luò)節(jié)點(diǎn)的運(yùn)動(dòng)控制,但對(duì)無線網(wǎng)絡(luò)節(jié)點(diǎn)的分布研究較少;哈爾濱工業(yè)大學(xué)從阻塞控制和數(shù)據(jù)壓縮兩個(gè)角度考慮,提出了不連接分段線性和不連接分段曲線兩種壓縮算法,以及加權(quán)公平性和基于神經(jīng)元PID控制的兩種數(shù)據(jù)傳輸協(xié)議,極大地提高了網(wǎng)絡(luò)傳輸?shù)耐掏铝俊?/p>
本文針對(duì)基站信號(hào)弱和通信距離遠(yuǎn)導(dǎo)致中繼機(jī)器人與控制臺(tái)通信斷開的極端情況,設(shè)計(jì)中繼通信機(jī)器人來保障整個(gè)系統(tǒng)高質(zhì)量的無線通信,實(shí)現(xiàn)信號(hào)質(zhì)量更穩(wěn)定、更可靠的作業(yè)環(huán)境,設(shè)計(jì)以下三個(gè)內(nèi)容:基于全局路徑規(guī)劃A*算法與局部路徑規(guī)劃DWA算法設(shè)計(jì)移動(dòng)中繼機(jī)器人提供動(dòng)態(tài)的網(wǎng)絡(luò)覆蓋,打破了傳統(tǒng)的定點(diǎn)中繼提供網(wǎng)絡(luò)覆蓋的局限性;基于通信質(zhì)量感知機(jī)制構(gòu)建融合通信質(zhì)量數(shù)據(jù)和位置信息的可視化地圖,通過犧牲時(shí)間成本提供更直觀的部署地圖,為控制機(jī)器人系統(tǒng)提供依據(jù);基于路徑規(guī)劃與通信質(zhì)量感知機(jī)制實(shí)現(xiàn)通信中斷自恢復(fù)機(jī)制,使得中繼機(jī)器人在面對(duì)通信中斷的突發(fā)狀況時(shí)能夠自主移動(dòng)到通信質(zhì)量良好的區(qū)域,為多機(jī)器人系統(tǒng)提供高質(zhì)量的無線通信環(huán)境。
1? 中繼通信機(jī)器人
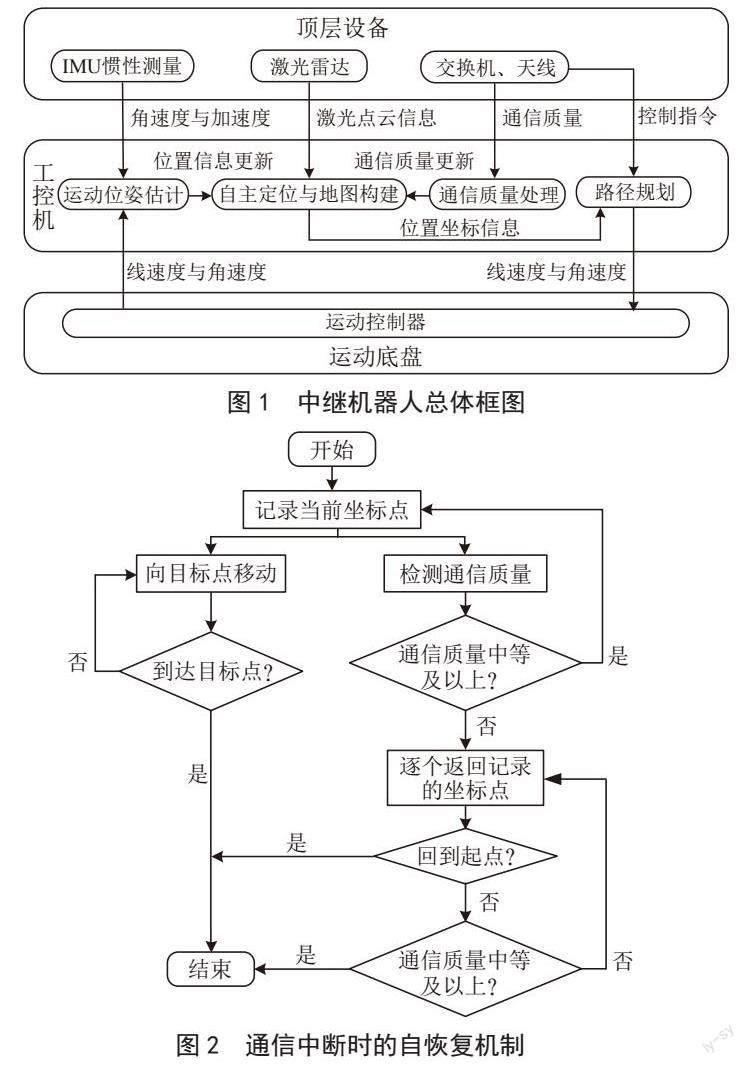
中繼機(jī)器人系統(tǒng)由頂層設(shè)備、數(shù)據(jù)處理設(shè)備和運(yùn)動(dòng)底盤三部分組成。頂層設(shè)備包括IMU慣性測(cè)量設(shè)備、激光雷達(dá)建圖設(shè)備和偉福特VFD5318W-MESH無線自組網(wǎng)設(shè)備;數(shù)據(jù)處理設(shè)備為工控機(jī),其操作系統(tǒng)為Ubuntu 18.04;移動(dòng)底盤主要由電機(jī)驅(qū)動(dòng)、STM32主控板和有刷電機(jī)構(gòu)成,系統(tǒng)總體框圖如圖1所示。
機(jī)器人的核心設(shè)備為工控機(jī),具有以下功能:將IMU獲取的角速度和加速度進(jìn)行運(yùn)動(dòng)位姿估計(jì);采用全局路徑規(guī)劃A*與局部路徑規(guī)劃DWA結(jié)合的方法對(duì)控制指令處理實(shí)現(xiàn)對(duì)運(yùn)動(dòng)底盤的控制;處理激光雷達(dá)掃描獲取的激光點(diǎn)云信息進(jìn)行自主定位與地圖構(gòu)建;對(duì)機(jī)器人天線與控制臺(tái)之間的通信質(zhì)量進(jìn)行監(jiān)測(cè)分析,并利用此信息進(jìn)行地圖通信質(zhì)量的更新。
1.1? 路徑規(guī)劃
由于實(shí)際工作環(huán)境都為動(dòng)態(tài)環(huán)境,使用全局路徑規(guī)劃算法無法實(shí)現(xiàn)運(yùn)動(dòng)環(huán)境發(fā)生局部變化情況下的自主導(dǎo)航,例如有行人突然出現(xiàn)在環(huán)境中等情況。所以本文采用全局路徑規(guī)劃A*算法與局部路徑規(guī)劃DWA算法結(jié)合的路徑規(guī)劃方法,實(shí)現(xiàn)移動(dòng)中繼機(jī)器人在工作環(huán)境以最優(yōu)的路線移動(dòng)。
ROS環(huán)境中move_base功能棧提供機(jī)器人路徑規(guī)劃技術(shù)的服務(wù)框架,此框架集成了全局路徑規(guī)劃A*算法與局部路徑規(guī)劃DWA算法的接口。利用此框架實(shí)現(xiàn)自主導(dǎo)航功能,首先將環(huán)境地圖以/map話題名傳入move_base控制器,以全局路徑規(guī)劃為基礎(chǔ)計(jì)算出當(dāng)前坐標(biāo)點(diǎn)與目標(biāo)點(diǎn)之間的運(yùn)動(dòng)路徑。隨后全局路徑規(guī)劃過程中激光雷達(dá)持續(xù)掃描運(yùn)行環(huán)境并將掃描數(shù)據(jù)傳入move_base控制器中局部路徑規(guī)劃接口,時(shí)刻根據(jù)動(dòng)態(tài)環(huán)境信息為中繼機(jī)器人提供運(yùn)動(dòng)速度與方向的調(diào)整,實(shí)現(xiàn)中繼機(jī)器人在動(dòng)態(tài)環(huán)境中躲避障礙物的功能。
1.2? 通信質(zhì)量地圖構(gòu)建
為實(shí)現(xiàn)可視化部署作業(yè)機(jī)器人和增強(qiáng)作業(yè)機(jī)器人與控制臺(tái)通信質(zhì)量的移動(dòng)中繼機(jī)器人,導(dǎo)航過程中需要得到中繼機(jī)器人和控制臺(tái)或者遠(yuǎn)程機(jī)器人之間的通信質(zhì)量,為繪制融合通信質(zhì)量的數(shù)據(jù)和中繼機(jī)器人位置信息的可視化地圖提供重要依據(jù)。本文采取網(wǎng)絡(luò)嗅探機(jī)制判斷中繼機(jī)器人與控制臺(tái)之間的通信質(zhì)量,判斷指標(biāo)為傳輸延時(shí)值,并將此機(jī)制作為工控機(jī)系統(tǒng)中的節(jié)點(diǎn)。中繼機(jī)器人以控制臺(tái)為起點(diǎn),開始運(yùn)行時(shí)啟動(dòng)此節(jié)點(diǎn),通過處理自身與控制臺(tái)之間傳輸?shù)臄?shù)據(jù)包,得到傳輸過程中的延時(shí)值,判斷中繼機(jī)器人與控制臺(tái)之間的通信質(zhì)量,同時(shí)記錄當(dāng)前位置坐標(biāo),為建圖做準(zhǔn)備。
中繼機(jī)器人移動(dòng)過程中對(duì)Odom里程計(jì)模塊返回的機(jī)器人坐標(biāo)點(diǎn)信息和網(wǎng)絡(luò)嗅探機(jī)制得到的通信質(zhì)量數(shù)據(jù)進(jìn)行量化分析,利用量化信息構(gòu)建融合通信質(zhì)量和坐標(biāo)信息的可視化地圖。本文將通信質(zhì)量劃分為三個(gè)等級(jí):傳輸數(shù)據(jù)包的延時(shí)值小于500 ms為優(yōu)良,地圖中對(duì)應(yīng)位置標(biāo)記白色;傳輸數(shù)據(jù)包的延時(shí)值大于500 ms但小于2 000 ms為良好,地圖中對(duì)應(yīng)位置標(biāo)記灰色;傳輸數(shù)據(jù)包的延時(shí)值大于2 000 ms為差,地圖中對(duì)應(yīng)位置標(biāo)記黑色。
1.3? 通信中斷自恢復(fù)機(jī)制
為保證中繼機(jī)器人在基站信號(hào)弱和通信距離遠(yuǎn)使中繼機(jī)器人與控制臺(tái)通信斷開的極端情況下正常運(yùn)行,本文設(shè)計(jì)實(shí)現(xiàn)通信中斷自恢復(fù)機(jī)制。
通信中斷自恢復(fù)機(jī)制依賴網(wǎng)絡(luò)嗅探機(jī)制,具體流程如圖2所示,中繼機(jī)器人以控制臺(tái)為起點(diǎn),開始運(yùn)行時(shí)記錄下初始坐標(biāo)點(diǎn)并啟動(dòng)通信質(zhì)量感知節(jié)點(diǎn),移動(dòng)過程中時(shí)刻監(jiān)測(cè)自身與控制臺(tái)的通信質(zhì)量。監(jiān)測(cè)情況有以下兩種:當(dāng)監(jiān)測(cè)到通信質(zhì)量良好及以上時(shí)會(huì)記錄此時(shí)的坐標(biāo)點(diǎn);當(dāng)監(jiān)測(cè)到通信信號(hào)受到干擾或通信距離遠(yuǎn)導(dǎo)致通信質(zhì)量差時(shí)會(huì)停止記錄坐標(biāo)點(diǎn),并向上一次記錄的通信質(zhì)量良好及以上的坐標(biāo)點(diǎn)移動(dòng),同時(shí)檢測(cè)通信質(zhì)量。如果通信質(zhì)量未恢復(fù)則會(huì)繼續(xù)向之前保存的坐標(biāo)點(diǎn)逐個(gè)返回,直到通信質(zhì)量恢復(fù)或回到出發(fā)點(diǎn);如果監(jiān)測(cè)到通信質(zhì)量達(dá)到良好及以上,中繼機(jī)器人將停止并等待控制臺(tái)發(fā)出控制指令,即完成了通信中斷時(shí)的自恢復(fù)機(jī)制。
2? 實(shí)驗(yàn)驗(yàn)證
2.1? 移動(dòng)中繼機(jī)器人對(duì)通信質(zhì)量的影響
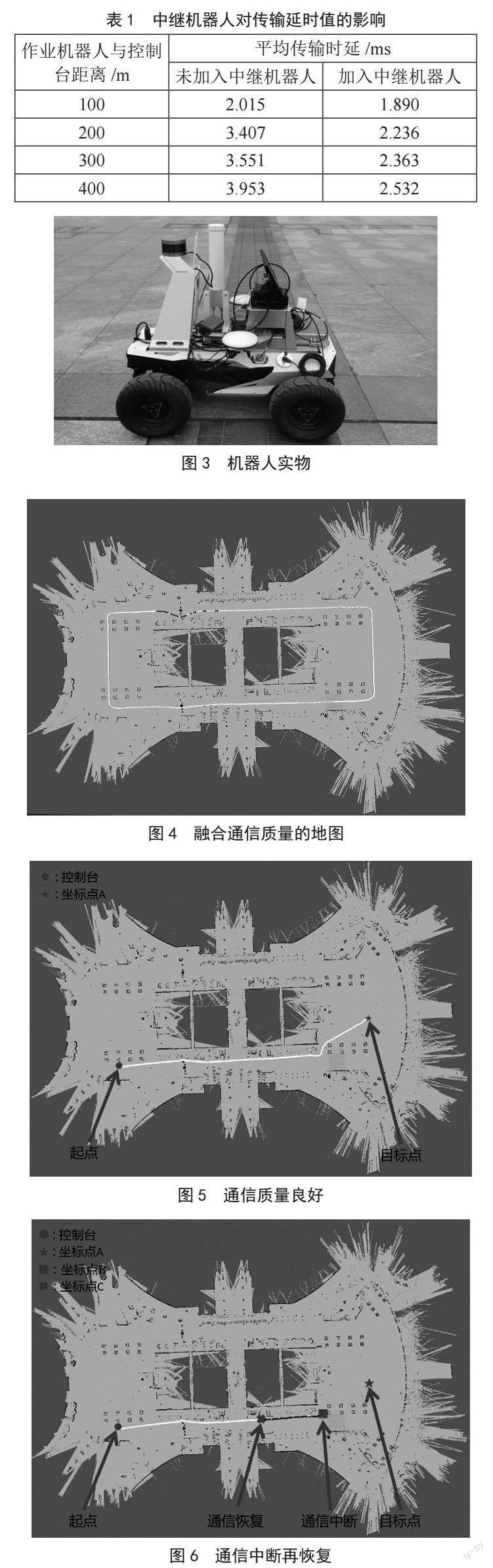
為證明該設(shè)計(jì)可以增強(qiáng)作業(yè)機(jī)器人與控制臺(tái)之間的通信質(zhì)量,對(duì)比中繼機(jī)器人加入前后作業(yè)機(jī)器人與控制臺(tái)之間的傳輸延時(shí)值,設(shè)計(jì)以下實(shí)驗(yàn)流程:實(shí)驗(yàn)中使用偉福特VFD5318W-MESH無線自組網(wǎng)設(shè)備進(jìn)行無線通信,其空中最高速率可達(dá)1 167 Mbit/s。總體策略如下:將作業(yè)機(jī)器人單獨(dú)與控制臺(tái)無線連接,通過兩者之間不同的連接距離(100 m、200 m、300 m、400 m)檢測(cè)作業(yè)機(jī)器人與控制臺(tái)之間進(jìn)行通信傳輸時(shí)的延時(shí)值。隨后在作業(yè)機(jī)器人與控制臺(tái)之間加入中繼機(jī)器人,并重復(fù)上述步驟。測(cè)量多個(gè)周期數(shù)據(jù)后對(duì)所得延時(shí)值取平均值,整理得到加入中繼機(jī)器人后作業(yè)機(jī)器人與控制臺(tái)之間通信質(zhì)量的數(shù)據(jù),如表1所示。隨著通信距離的增加,測(cè)量得到的通信質(zhì)量會(huì)變差,原因在于障礙物的遮擋和空氣中信號(hào)的衰減,加入中繼機(jī)器人后,其傳輸延時(shí)值下降,通信質(zhì)量有明顯提高。
2.2? 通信質(zhì)量地圖的構(gòu)建
為探索該方案可以提供機(jī)器人作業(yè)可視化部署的功能即通信質(zhì)量地圖的構(gòu)建,設(shè)計(jì)以下實(shí)驗(yàn)流程:測(cè)試環(huán)境是一處約200 m×80 m的戶外場(chǎng)地,機(jī)器人如圖3所示。首先機(jī)器人緩慢行進(jìn),對(duì)激光雷達(dá)和通信質(zhì)量探測(cè)程序返回的數(shù)據(jù)建立如圖4所示的融合通信質(zhì)量的地圖。圖中白色代表低延時(shí),通信質(zhì)量優(yōu)良;灰色代表中等延時(shí),通信質(zhì)量良好;黑色代表高延時(shí),通信質(zhì)量差,連接中斷。實(shí)驗(yàn)中由于障礙物的遮擋出現(xiàn)了連接斷開的情況,同時(shí)由于測(cè)試環(huán)境不是封閉的空間,所以在地圖邊緣處存在較多毛刺。實(shí)驗(yàn)中機(jī)器人只是環(huán)繞戶外場(chǎng)地進(jìn)行了通信質(zhì)量的探測(cè),未遍歷地圖的各個(gè)位置,所以只有機(jī)器人經(jīng)過地方的通信質(zhì)量狀態(tài)。如果在實(shí)際應(yīng)用中需要大范圍的探測(cè)那么可以通過犧牲時(shí)間成本來遍歷地圖,犧牲越多的時(shí)間成本可以更加直觀可靠地部署作業(yè)機(jī)器人。
2.3? 通信中斷時(shí)的自恢復(fù)機(jī)制
為證明該方案可實(shí)現(xiàn)通信中斷時(shí)的自恢復(fù),即檢驗(yàn)通信中斷后中繼機(jī)器人是否可以返回到通信質(zhì)量良好的坐標(biāo)點(diǎn)并受到控制臺(tái)的控制,設(shè)計(jì)以下實(shí)驗(yàn)流程:由于通信信號(hào)范圍很廣,實(shí)驗(yàn)中采用拔掉網(wǎng)線的方式來模擬通信中斷的情況,如果在通信中斷后中繼機(jī)器人可以返回到上一個(gè)通信質(zhì)量良好及以上的坐標(biāo)則證明中斷恢復(fù)機(jī)制可以實(shí)現(xiàn);反之,則證明未實(shí)現(xiàn)。中繼機(jī)器人以控制臺(tái)的位置為起點(diǎn),以坐標(biāo)點(diǎn)A為目標(biāo)點(diǎn),進(jìn)行路徑規(guī)劃導(dǎo)航,全程保持通信質(zhì)量良好得到導(dǎo)航結(jié)果如圖5所示。
進(jìn)一步,中繼機(jī)器人重新以控制臺(tái)為起點(diǎn),向目標(biāo)點(diǎn)前進(jìn),進(jìn)行路徑規(guī)劃,當(dāng)中繼機(jī)器人到達(dá)坐標(biāo)點(diǎn)B時(shí)將控制臺(tái)端發(fā)射天線的網(wǎng)線拔掉,使得中繼機(jī)器人不能接收到控制臺(tái)的信號(hào),模擬通信中斷情況,此時(shí)中繼機(jī)器人停止前進(jìn),不斷返回之前保存的通信質(zhì)量良好的坐標(biāo)點(diǎn),直到控制臺(tái)端發(fā)射天線的網(wǎng)線連接恢復(fù)即通信質(zhì)量恢復(fù)。
情況1:如果在此過程中通信質(zhì)量恢復(fù)則中繼機(jī)器人停止運(yùn)動(dòng),等待控制臺(tái)發(fā)出控制指令,實(shí)驗(yàn)中采用將網(wǎng)線連接恢復(fù)模擬通信質(zhì)量恢復(fù),中繼機(jī)器人在通信質(zhì)量良好的坐標(biāo)點(diǎn)C停止,其運(yùn)動(dòng)路徑結(jié)果如圖6所示。
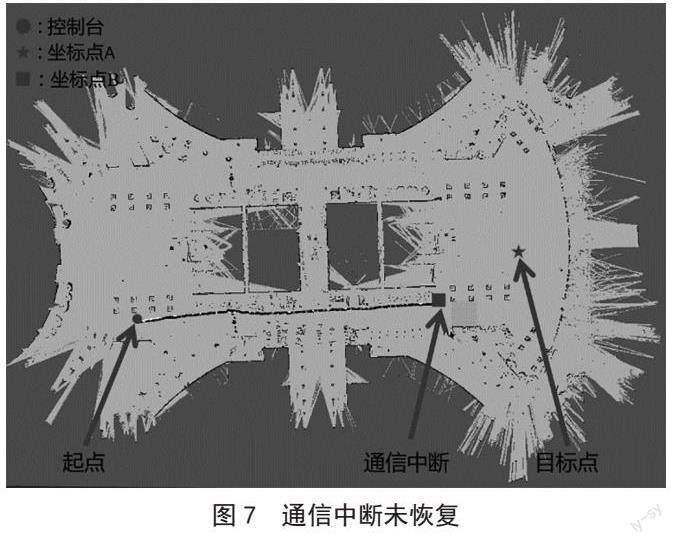
情況2:如果在此過程中通信質(zhì)量一直未恢復(fù),則中繼機(jī)器人會(huì)一直返回,直到返回控制臺(tái)(起點(diǎn)),其運(yùn)動(dòng)路徑結(jié)果如圖7所示。
由實(shí)驗(yàn)結(jié)果可知,當(dāng)通信中斷時(shí)中繼機(jī)器人可以準(zhǔn)確地返回到通信質(zhì)量良好的坐標(biāo)點(diǎn),但返回過程中因?yàn)槭侵饌€(gè)坐標(biāo)點(diǎn)進(jìn)行返回導(dǎo)致機(jī)器人運(yùn)動(dòng)存在一些頓挫感。
3? 結(jié)? 論
本文首先對(duì)全局路徑規(guī)劃A*算法與局部路徑規(guī)劃DWA算法進(jìn)行研究,隨后基于對(duì)通信質(zhì)量感知機(jī)制的研究建立了融合通信質(zhì)量與位置坐標(biāo)的地圖,最后基于路徑規(guī)劃與通信質(zhì)量感知機(jī)制實(shí)現(xiàn)了通信中斷情況下的自恢復(fù)機(jī)制。隨著多機(jī)器人系統(tǒng)的發(fā)展,保證整套機(jī)器人系統(tǒng)的通信質(zhì)量和為作業(yè)機(jī)器人提供可視化的部署環(huán)境愈加重要。本文移動(dòng)中繼機(jī)器人打破了傳統(tǒng)定點(diǎn)中繼提供網(wǎng)絡(luò)覆蓋的局限性,融合通信質(zhì)量地圖的構(gòu)建為部署作業(yè)機(jī)器人提供了可視化的地圖,同時(shí)通信中斷的自恢復(fù)機(jī)制使得機(jī)器人可以在通信中斷的突發(fā)情況下自主移動(dòng)到通信質(zhì)量良好的區(qū)域,有助于保障多機(jī)器人系統(tǒng)的無線通信環(huán)境。然而,在衡量通信質(zhì)量的指標(biāo)選取中,本文只采用了延時(shí)值的方法衡量通信質(zhì)量情況,較為單一,后續(xù)研究中考慮加入誤碼率、誤信率以及信道帶寬等指標(biāo)對(duì)通信質(zhì)量進(jìn)行綜合衡量,以提高通信質(zhì)量的有效性和可靠性。
參考文獻(xiàn):
[1] 王碩.多機(jī)器人系統(tǒng)協(xié)調(diào)協(xié)作理論與應(yīng)用的研究 [D].北京:中國科學(xué)院自動(dòng)化研究所,2001.
[2] 龍曉林.基于網(wǎng)絡(luò)模型的多機(jī)器人系統(tǒng)研究 [D].杭州:浙江大學(xué),2007.
[3] 郭意,唐濤.CDMA技術(shù)的原理與應(yīng)用 [J].信息通信,2016(4):253.
[4] 高亞軍.基于移動(dòng)機(jī)器人的自主WiFi中繼研究 [D].哈爾濱:哈爾濱工業(yè)大學(xué),2016.
[5] 李國華.無線傳感器網(wǎng)絡(luò)高效數(shù)據(jù)傳輸方法 [D].哈爾濱:哈爾濱工業(yè)大學(xué),2014.
[6] 張宇浩.可探測(cè)鏈路連通性的核輻射環(huán)境中繼通信機(jī)器人研究 [D].綿陽:西南科技大學(xué),2022.
[7] 劉銀山,鐘曉峰,王京.認(rèn)知合作中繼網(wǎng)絡(luò)中的最優(yōu)中繼選擇策略 [J].電信科學(xué),2015,31(11):36-41.
[8] 蔣海芳,張四海,周武旸.基于統(tǒng)計(jì)信道狀態(tài)信息的節(jié)能分布式中繼選擇 [J].應(yīng)用科學(xué)學(xué)報(bào),2012,30(3):221-226.
作者簡介:陳永波(2000—),男,漢族,河北滄州人,本科在讀,研究方向:機(jī)器人技術(shù);通訊作者:肖宇峰(1978—),男,漢族,湖南常德人,教授,博士,研究方向:智能系統(tǒng)。
