具有群體性行為的捕食者-食餌系統(tǒng)穩(wěn)定性分析
2023-06-21 08:31:24李夢婷
安慶師范大學學報(自然科學版) 2023年2期
關鍵詞:系統(tǒng)
李夢婷,周 文
(安徽師范大學 數(shù)學與統(tǒng)計學院,安徽 蕪湖 241002)
在自然生態(tài)系統(tǒng)中,大多數(shù)生物以群體形式活動,如魚類[1]、浮游生物[2]等,這種現(xiàn)象引起了眾多學者的關注。許多研究人員分析了具有群體性行為的捕食者-食餌系統(tǒng)[3-6],并尋找合適的功能反應函數(shù)來描述這些群體性行為。Gause[7]指出食餌的群體性行為是一種防御模式,捕食者只能沿著食餌種群的邊緣與之相互作用從而保護了內部的食餌群體,并提出了用平方根功能反應函數(shù)。Pal等[8]考慮了一種食餌具有群體性行為的捕食-食餌系統(tǒng),用平方根模擬功能反應函數(shù),分析了系統(tǒng)的局部穩(wěn)定性和分支問題。平方根型功能反應函數(shù)的使用恰當?shù)亟忉屃讼嗷プ饔檬前l(fā)生在種群邊界上的現(xiàn)象。Liu等[9]研究了具有更加復雜的平方根型功能反應函數(shù)的捕食者-食餌系統(tǒng):
其中,u表示t時刻食餌的密度,v表示t時刻捕食者的密度,β表示捕食者的死亡率,α表示食餌逃避攻擊的能力,χ?(v)v?u表示捕食者向食餌移動的速度。
在生物數(shù)學中,具有時滯效應的生態(tài)系統(tǒng)穩(wěn)定性和種群的空間分布是一項重要的研究課題。一般來說,在生物學系統(tǒng)中加入時滯會使模型更加符合實際,也會產(chǎn)生更加豐富的空間動力學行為[10-14]。Yan等[15]研究了如下的一類具有種群行為和Allee效應的捕食系統(tǒng)的復雜動力學:
其中,α,β,γ,d1,d2均是正常數(shù),τ是時滯,表示食餌和捕食者的妊娠時間。
本文將通過理論和數(shù)值模擬來研究如下具有時滯和平方根功能反應函數(shù)的捕食者-食餌系統(tǒng):
其中,u表示t時刻食餌的密度,v表示t時刻捕食者的密度,k0表示恐懼效應參數(shù),m1表示捕食者的死亡率,m2表示捕食者的擁擠效應參數(shù),b,ρ分別表示食餌逃避攻擊的能力和轉化率,d1,d2分別表示食餌和捕食者的擴散系數(shù),τ是時滯,表示食餌的妊娠時間(x,t)∈Ω×R+,Ω ∈R2為邊界光滑的有界區(qū)域,ν為?Ω上單位外法向量。
系統(tǒng)(3)對應的常微分系統(tǒng)為
本文亮點工作有:將時滯與平方根功能反應函數(shù)相結合,探討時滯對于系統(tǒng)平衡點穩(wěn)定性的影響;與已有文獻相比,Hopf分支曲線展示了轉化率ρ與系統(tǒng)穩(wěn)定區(qū)間的非線性關系現(xiàn)象為Hopf分支臨界值);通過數(shù)值模擬生動展示了時滯對于螺旋波斑圖生成的影響。
1 平衡點的穩(wěn)定性
為考慮模型具有的生物學意義,本文只研究系統(tǒng)(4)的正平衡點,令
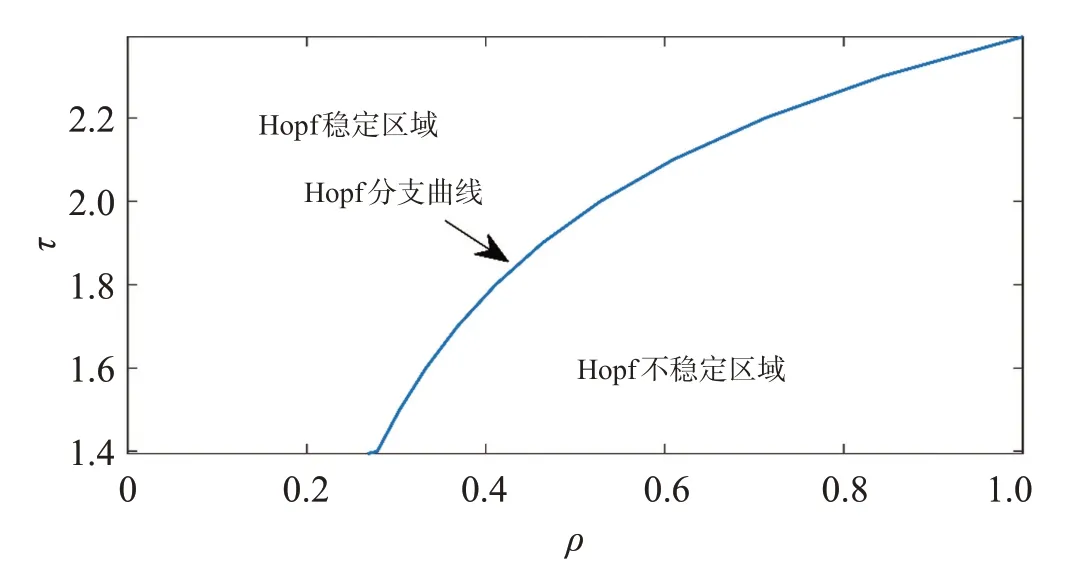
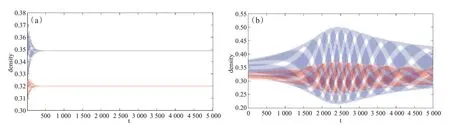
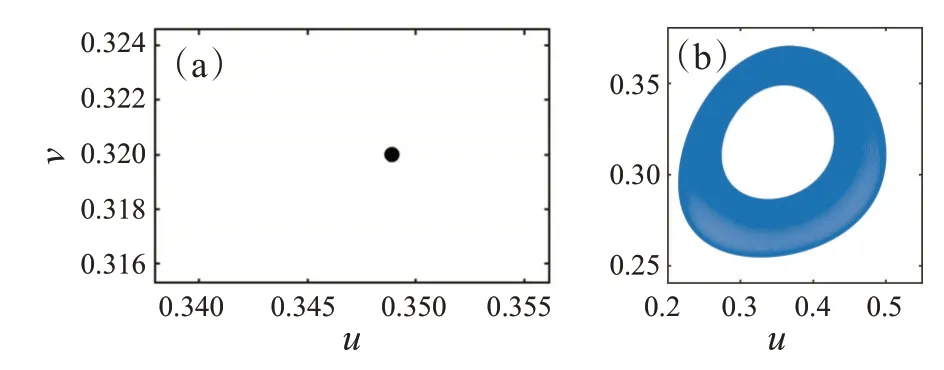
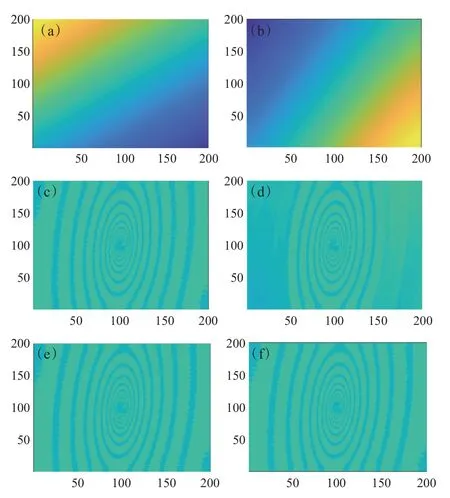
則系統(tǒng)(4)至少存在一個正平衡點E?=(u?,v?),滿足v?>0和0 圖1 系統(tǒng)(4)在E?=(u?,v?)處的等傾線圖(k0=1.74,b=0.5,m1=0.2,m2=0.8) 接下來考慮系統(tǒng)(3)在正平衡點E?處的穩(wěn)定性,首先在(u?,v?)處引入小擾動: 系統(tǒng)(3)在正平衡點E?=(u?,v?)處的線性化方程為 由以上分析可得,系統(tǒng)(3)的線性近似系統(tǒng)特征方程為 作出假設:H1:a11+ρa22<0;H2:a11a22-a12a21>0;H3:a11d2+ρa22d1<0。 定理2對任意波數(shù)k∈{0,1,2,…,},當τ=0時,若H1-H3成立,則系統(tǒng)(3)的正平衡點E?局部漸近穩(wěn)定。 證當τ=0時,特征方程(8)變?yōu)?/p> 對任意k∈{0,1,2,…,},由H1知M1>0,由H2,H3知M2+M3>0,由Routh-Hurwitz準則知E?局部漸近穩(wěn)定。 注記1由于ρ影響條件H1,H3是否成立,結合上述定理可知,若不考慮時滯,ρ影響正平衡點的穩(wěn)定性。 以時滯為Hopf分支的參數(shù),利用線性穩(wěn)定性理論對系統(tǒng)(3)進行穩(wěn)定性和Hopf分支分析。設iω是方程(8)的純虛根,則ω滿足下列方程: 分離上述方程的實部和虛部,推出 將方程(11)兩邊平方再相加,得到 定理3對任意的τ>0,k∈{0,1,2,…,},若滿足條件H2-H5,則系統(tǒng)(3)的正平衡點E?局部漸近穩(wěn)定。 證設方程(13)有兩個根Z1,Z2,由韋達定理,得到 綜上,當條件H2-H5成立時,方程(13)有兩個具有負實部的根,由Routh-Hurwitz準則可知定理成立。 注記2由于ρ影響條件H4是否成立,結合上述定理可知,若考慮時滯,ρ影響正平衡點的穩(wěn)定性。 通過以上分析得到下列定理。 定理5若H1-H3,H6成立,則下述命題成立:(i)當τ∈時,系統(tǒng)(3)的平衡點E?=(u?,v?)是局部漸近穩(wěn)定的;(ii)當τ∈時,系統(tǒng)(3)的平衡點E?=(u?,v?)是不穩(wěn)定的。 通過以上穩(wěn)定性分析和分支理論,得到如下ρ-τ關系(圖2),其參數(shù)設置為k0=1.74,b=0.5,m1=0.2,m2=0.8,d1=0.02,d2=0.04。Hopf分支曲線將整個區(qū)域分成兩個參數(shù)空間,即穩(wěn)定區(qū)域和不穩(wěn)定區(qū)域,可以看出轉化率ρ與穩(wěn)定區(qū)間呈正相關,且轉化率越大穩(wěn)定區(qū)間越大。 圖2 系統(tǒng)(3)的Hopf分支 通過數(shù)值模擬直觀展現(xiàn)出系統(tǒng)(3)在正平衡點E?處的動力學行為,以此來驗證理論推導的正確性。在本文所有數(shù)值模擬中,因為捕食者和食餌的空間斑圖是類似的,所以這里僅研究食餌空間斑圖的形成,部分參數(shù)設置為:k0=1.74,b=0.5,m1=0.2,m2=0.8,d1=0.02,d2=0.04。 當系統(tǒng)(3)的轉化率ρ=0.8時,計算可知此時系統(tǒng)正平衡點E?=(0.348 9,0.320 0),Hopf分支臨界值為=2.269 7。根據(jù)定理5 可知,若則系統(tǒng)正平衡點穩(wěn)定;若則系統(tǒng)正平衡點不穩(wěn)定。圖3展示了時滯τ=1.9 和τ=2.32 時的食餌與捕食者的密度演化。圖3(a)表示時滯為τ=1.9時的密度演化(藍色為食餌密度演化,紅色為捕食者密度演化),在t>500 后的密度值幾乎不變,且數(shù)值均為平衡時的值,即u=0.348 9,v=0.320 0,這說明系統(tǒng)正平衡點是穩(wěn)定的。圖3(b)表示時滯為τ=2.32時的密度演化,隨著時間的變化,捕食者與食餌的密度呈現(xiàn)振蕩的變化趨勢,系統(tǒng)正平衡點是不穩(wěn)定的,這符合定理5的結果。因此,在足夠長時間內捕食者與食餌的空間斑圖都會朝著不規(guī)則的趨勢變化。可以看出,在正平衡點穩(wěn)定和不穩(wěn)定的情況下捕食者和食餌的密度演化都基本相同。圖4展示了時滯τ=1.9和τ=2.32時系統(tǒng)的相圖。圖4(a)表示時滯為τ=1.9 ∈時的相圖,其呈現(xiàn)為一個點(0.348 9,0.320 0),即食餌和捕食者的密度值是一個固定值,其不隨時間變化而改變,即該點為正平衡點E?,這說明系統(tǒng)在正平衡點處呈穩(wěn)定狀態(tài),也進一步說明了正平衡點是穩(wěn)定的。圖4(b)為時滯τ=2.32 ∈時的相圖,為一個極限環(huán),這表明在附近會產(chǎn)生Hopf分支現(xiàn)象,進一步證實了理論結果。 圖3 系統(tǒng)(3)的捕食者與食餌的密度演化。(a)τ=1.9;(b)τ=2.32 圖4 系統(tǒng)(3)的相圖。(a)τ=1.9;(b)τ=2.32 圖5 τ=2.1,平衡點是穩(wěn)定的 圖6 τ=2.32,平衡點是不穩(wěn)定的 參數(shù)設置同圖3。圖7和圖8展示的是上述兩種僅時滯τ取不同值情況下食餌的空間斑圖演化過程,其中各子圖右側的顏色欄可作為食餌密度值的參照。圖7表示的是時滯為τ=1.9 ∈情況,各子圖分別展示了時間(a)t=0,(b)t=1500,(c)t=2 500,(d)t=4 500,(e)t=8 000和(f)t=10 000時刻下的空間密度分布。由于初始擾動,t=1500 時食餌的密度分布不均勻,但在t=2 500 時食餌的密度分布開始變得均勻,且一直到t=10 000時密度分布仍然均勻,且由數(shù)值結果發(fā)現(xiàn)長時間下食餌的密度一直在0.348 9 且與正平衡點u?=0.348 9 相同,數(shù)值結果符合理論,證實了系統(tǒng)的正平衡點是穩(wěn)定的;圖8 展示的是時滯τ=2.32 ∈(+∞)的情況,各子圖分別為(a)t=0,(b)t=1500,(c)t=2 000,(d)t=3000,(e)t=7 500和(f)t=10 000時刻下的空間密度分布,此時正平衡點是不穩(wěn)定的。從圖可知,規(guī)則的螺旋波隨著時間的演化逐漸形成,而后螺旋波由邊緣開始破碎,最后不規(guī)則的螺旋波斑圖占據(jù)了整個區(qū)域。上述結果不僅證實了定理5的結論,而且揭示了時滯會對系統(tǒng)空間分布產(chǎn)生影響并使其出現(xiàn)螺旋波斑。 圖7 τ=1.9時食餌的空間斑圖 圖8 τ=2.32時食餌的空間斑圖 時滯對捕食者-食餌系統(tǒng)的統(tǒng)動力學行為有重要的影響,本文分別從理論推導和數(shù)值模擬兩方面研究了時滯對具有平方根型功能反應函數(shù)的捕食者-食餌系統(tǒng)的影響。結果表明:(1)無論有無時滯,轉化率都會影響系統(tǒng)正平衡點的穩(wěn)定性;(2)以時滯為分支參數(shù)時,轉化率對Hopf分支的臨界值有影響,并且在一定區(qū)間內,轉化率的增大會導致臨界值變大;(3)轉化率不影響捕食者與食餌的密度,隨著轉化率的增加,其對時滯臨界值的影響程度越來越小,在實際生物系統(tǒng)中可適當增大轉化率來保持系統(tǒng)的穩(wěn)定。
2 Hopf分支分析
3 數(shù)值模擬
3.1 平衡點的穩(wěn)定性
3.2 Hopf分支


3.3 二維空間斑圖

4 結論
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32