基于機器學習算法的圖像邊緣識別
2023-06-22 14:10:18朱建洲韓清宇林佳濤徐小雅
無線互聯科技 2023年4期
朱建洲 韓清宇 林佳濤 徐小雅

摘要:文章首先改進邊緣檢測算法對圖像邊緣進行定位,使用雙邊濾波代替高斯濾波進行去噪處理,利用灰度相似性與幾何相似性的權值分配邊緣特征,提高精度:其次,在提取邊緣坐標工作中利用多項式插值的方式提取出亞像素級精度的圖像邊緣坐標表示:最后,利用邊緣輪廓追蹤分析法實現了邊緣線段分割,并將直線型、圓弧型以及橢圓弧型邊緣進行曲線擬合,實現邊緣幾何屬性提取。
關鍵詞:亞像素邊緣提取:邊緣擬合:邊緣提取算法
中圖分類號:TP312
文獻標志碼:A
0 引言
邊緣檢測是圖像處理和計算機視覺中的一個基本問題。邊緣檢測的目的是識別數字圖像中灰度變化明顯的點。邊緣是反映圖像結構和內容的重要特征之一。因此,圖像邊緣檢測的研究對數字圖像處理具有重要的意義。邊緣是指目標對象與背景的邊界。在現實應用中,只有對處理后的圖像進行準確的邊緣提取,才能有效實現目標與背景的分離。在現實的應用過程中,邊緣識別領域中噪聲處理、邊緣識別以及邊緣擬合問題亟待解決,為了減少數字圖像噪聲的影響,在使用效果較好的邊緣檢測算法的同時采用雙邊濾波對濾波處理進行優化:邊緣數字特征的量化有助于工件檢驗等具體應用的延展,本文基于邊緣識別后的邊緣分割結果,將邊緣以不同形式線段進行計算,最終實現邊緣的量化。通過適用方法的組合,這些問題在本文中都給出了解決方案。
1 圖像邊緣問題分析
為有效提取亞像素邊緣并轉化為可量化特征,主要包括以下兩個問題。
問題1:亞像素邊緣提取,目標為對亞像素邊緣提取方法進行建模分析,處理精度至少為0.1像素。為在消除邊緣毛刺和陰影部分干擾的基礎上,提取出圖像主要邊緣部分的亞像素邊緣輪廓邊界。在識別邊緣的點集后,將點數據轉化為有序邊緣輪廓曲線數據。把提取的邊緣輪廓輸出為彩色邊緣輪廓圖像以獲取邊緣輪廓總數、邊緣輪廓總長度、輪廓曲線的數量和長度、每條輪廓點的X和Y坐標數據。文中給出了每幅圖上的等高線總數、每條曲線上的點數和長度數據。
問題2:邊緣量化,本文利用亞像素輪廓邊緣數據,建立模型,將邊緣輪廓曲線數據自動分割擬合為直線段、圓弧段或橢圓網弧段,得到邊緣輪廓自動分割和擬合的模型方法和策略。
2 亞像素邊緣提取模型
2.1 模型基礎
整體建模過程分為4個部分:
(1)選擇一個濾波器對附件提供的圖像進行預處理,用以消除由于設備和照明條件等因素造成的圖像本身的噪聲。
(2)采用Canny邊緣檢測算法對圖像邊緣進行粗略定位,找到像素基點進行進一步研究。
(3)采用多項式插值算法在粗定位像素的基礎上尋找亞像素點,獲得更高精度的圖像邊緣。
(4)采用邊緣評價指標對邊緣質量和精度進行評價,用于后續的模型分析。
2.2 模型的假設
附件1中的所有圖像都進行了幾何標定,即圖像中的邊緣不會失去特征,不會被扭曲。附件1中的圖像是垂直于鏡子拍攝的,沒有嚴重的透視變形。所討論的邊緣類別僅為階梯狀邊緣和屋頂狀邊緣,其中臺階邊緣為主,屋頂邊緣可以看作是臺階邊緣的組合子像素分布在有序邊緣點集組成的曲線上。子像素分布在有序邊緣點集構成的曲線上。
2.3 具體解決步驟
2.3.1 圖像去噪
由于數字圖像信號在采樣過程中會受到采樣設備或采樣環境的影響,因此會產生一定的圖像噪聲。在圖像去噪過程中,本文選擇使用雙邊濾波來改進使用高斯濾波的Canny邊緣檢測算法。
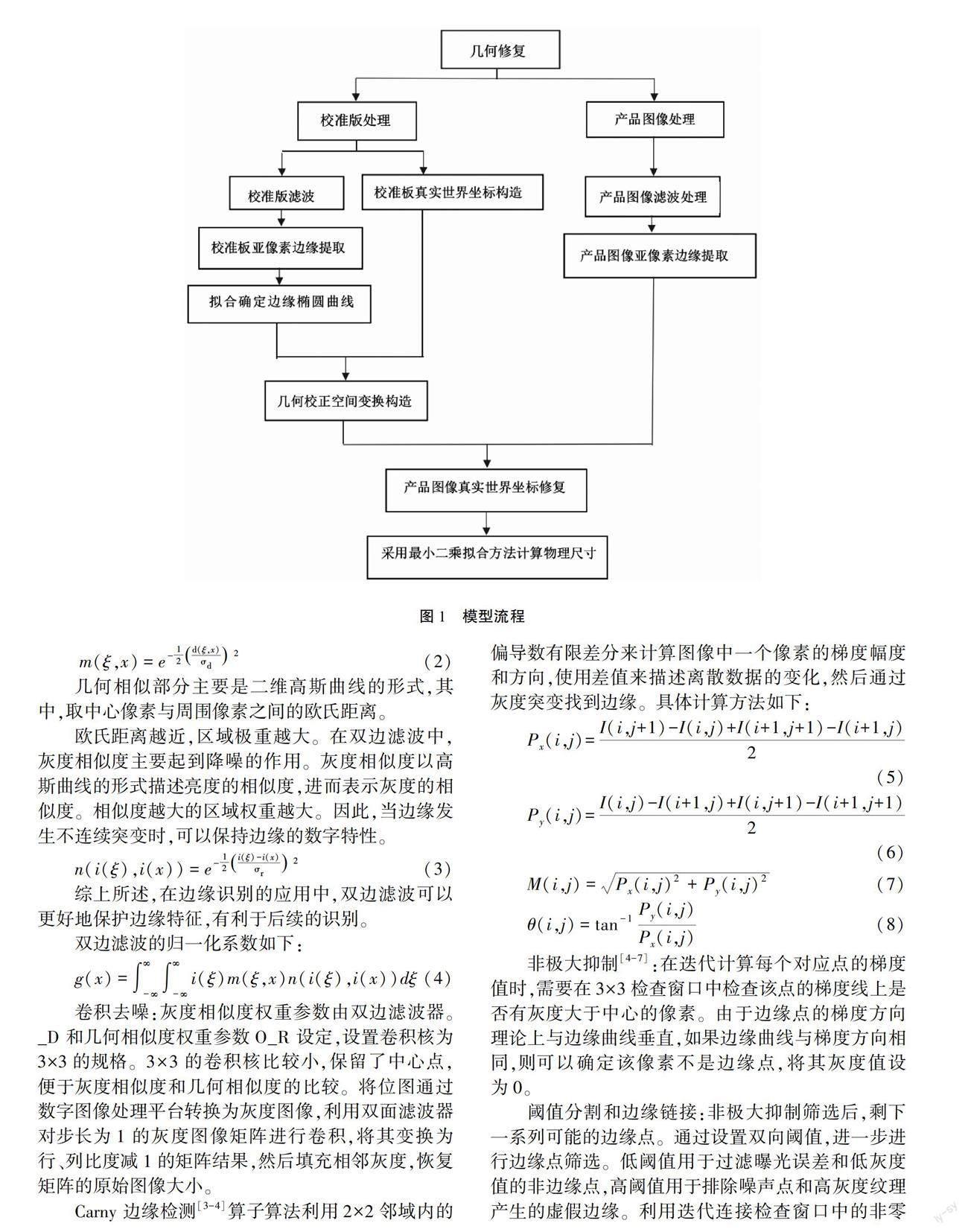
雙邊濾波器[1-2]根據灰度和幾何位置這兩個主要因素動態調整卷積核,盡可能保留邊緣的主要特征。雙邊濾波器是反映灰度相似度和幾何位置相似度值的組合。
幾何相似部分主要是二維高斯曲線的形式,其中,取中心像素與周圍像素之間的歐氏距離。
歐氏距離越近,區域極重越大。在雙邊濾波中,灰度相似度主要起到降噪的作用。灰度相似度以高斯曲線的形式描述亮度的相似度,進而表示灰度的相似度。相似度越大的區域權重越大。因此,當邊緣發生不連續突變時,可以保持邊緣的數字特性。
綜上所述,在邊緣識別的應用中,雙邊濾波可以更好地保護邊緣特征,有利于后續的識別。
雙邊濾波的歸一化系數如下:
卷積去噪:灰度相似度權重參數由雙邊濾波器。一D和幾何相似度權重參數O_R設定,設置卷積核為3x3的規格。3x3的卷積核比較小,保留了中心點,便于灰度相似度和幾何相似度的比較。將位圖通過數字圖像處理平臺轉換為灰度圖像,利用雙面濾波器對步長為1的灰度圖像矩陣進行卷積,將其變換為行、列比度減1的矩陣結果,然后填充相鄰灰度,恢復矩陣的原始圖像大小。
Carny邊緣檢測[3-4]算子算法利用2x2鄰域內的偏導數有限差分來計算圖像中一個像素的梯度幅度和方向,使用差值來描述離散數據的變化,然后通過灰度突變找到邊緣。具體計算方法如下:
非極大抑制[4-7]:在迭代計算每個對應點的梯度值時,需要在3x3檢查窗口中檢查該點的梯度線上是否有灰度大于中心的像素。由于邊緣點的梯度方向理論上與邊緣曲線垂直,如果邊緣曲線與梯度方向相同,則可以確定該像素不是邊緣點,將其灰度值設為0。
閾值分割和邊緣鏈接:非極大抑制篩選后,剩下一系列可能的邊緣點。通過設置雙向閾值,進一步進行邊緣點篩選。低閾值用于過濾曝光誤差和低灰度值的非邊緣點,高閾值用于排除噪聲點和高灰度紋理產生的虛假邊緣。利用迭代連接檢查窗口中的非零像素實現邊緣連接。
2.3.2 亞像素提取
多項式插值算法[8-9]:利用Canny邊緣檢測算法,可以得到具有像素級精度的邊緣像素和像素梯度值,并根據拉格朗日插值法構造所有像素的唯一曲線。
2.4分析結果
2.4.1 總體分析
通過對邊緣提取前后的對比分析,看出圖像的亞像素邊緣提取是比較成功的。通過放大顯示,看到邊緣是連續的且足夠薄,經過對不同輪廓線段的對比分析表明,在亞像素精度下,整體視覺下的對稱結構顯示不完全對稱。使視覺對稱成立的主要因素可能與亞像素邊緣曲線二階偏導數高值段的位置對稱性和長度相似有關。
2.4.2 雙邊過濾
結果利用MATLAB對圖像進行分析,對圖像進行雙邊濾波,得到前后對比,如圖2所示。
2.4.3 亞像素輪廓提取結果
使用HDevelop軟件對圖像進行亞像素提取,得到圖像的亞像素輪廓,得到的輪廓點總數為3 498,總長度為2 936. 99。
2.4.4 邊緣輪廓數據
圖上的等高線總數,每條曲線上的部分點數和長度數據如表1所示。
3 邊緣輪廓分割模型[10-11]
由于切點處的曲率變化很大,需要處理的弧線采用曲率累積法檢測切點。理論上,直線段的曲率累積線是一條水平線,弧段的曲率累積線是一條傾斜線,直線(或弧)和弧的切點是對應的兩條曲率累積線的交點。計算待處理的弧線曲率累積線兩端的線方程,然后計算每個曲率累積點到直線的距離,找到距離的最大點,即切點。根據切線點對處理的輪廓進行重新分割。
識別分割線段的形狀,采用最小二乘法擬合分割線段,識別直線型、圓弧型和橢網弧型。
對于線性型最小二乘公式,設擬合直線的公式為y=ax+b,擬合直線的斜率為:
4 亞像素邊緣提取模型的特點分析
4.1 優點與缺點
優點:(1)采用雙邊濾波器代替傳統的中值濾波器或高斯濾波器,以保留邊緣特征,盡可能消除圖像噪聲的影響;(2)利用當前更精確的Canny邊緣檢測算子,獲得了一個相對較好的粗定位結果;(3)采用多項式插值算法,比擬合算法和矩法計算‘61代價輕、速度快。
缺點:(1)雙邊濾波器動態調整濾波器的算法會增加整體操作的時間復雜度,計算量過大,灰度相似度較低的σ,設置需要反復調整。(2)邊緣檢測算法的大小閾值設置需要根據不同的圖像進行額外設置,需要提高模型的通用性。(3)與矩法和擬合算法相比,多項式插值算法的精度相對較低。
4.2 模型的應用和推廣
增強現實應用開發,基于亞像素邊緣檢測,可以有效地檢測現實世界中目標的邊緣,對目標進行層次確認、檢索和分析。通過亞像素和邊緣檢測,有助于捕獲和放大真實圖像信號、非法圖像識別等功能。
在精密零件的檢測中,可以通過亞像素邊緣檢測來分析精密零件的對稱性、完整性和標準化等不同的形態特性。同時,利用邊緣捕捉技術可以準確地確定零件的制造誤差和特殊零件的損傷面積和損傷情況。
該模型可用于模具的實際生產。通過捕獲的模具圖像,可以獲得圖像中每個線段的幾何屬性的測量。與人工測量相比,它具有效率高、精度高的優點。
4.3 誤差分析
亞像素邊緣噪聲接近于設定的閾值,因此算法無法排除該噪聲。雖然該算法在亞像素點提取過程中形成了一些閉環點集,但總體上不影響對其他明顯的亞像素邊緣的檢測和提取。同時,通過濾波消除了大部分陰影和照明的影響后,噪聲閉環明顯降低,但仍會受到真實物體的磨損造成的色差的影響,磨損區域將被納入邊緣檢測類別。
5 結語
本文主要基于傳統的Canny邊緣檢測算法之上,通過使用雙邊濾波代替高斯濾波的方式對邊緣的粗定位進行優化,通過多項式插值算法求解出邊緣上的亞像素點得到亞像素級精度的圖像邊緣。結果表示亞像素邊緣的長度和像素點能夠被求解得到,且保留了更多的圖像特征。此外,本文也在亞像素級精度邊緣上對邊緣分割的技術進行了延展,具有一定實用性。
參考文獻
[1]李釗寶,汪新新,賈茜媛.基于機器視覺的工件尺寸高精度測量方法[J].計算機測量與控制.2015( 6):1866-1870.
[2]劉冉,丁春燕.SAR圖像雙邊濾波算法及MATLAB仿真實驗[J].數字技術與應用,2021(9):38-40.
[3]田貝樂,牛宏俠,劉義健.一種優化的Canny邊緣檢測算法[J].鐵路計算機應用,2021( 10):14-18.
[4]陳海峰.數字圖像中基本幾何形狀檢測算法的研究與應用[D].杭州:浙江大學,2007.
[5]王章鋒.邊緣檢測方法研究及應用[D].天津:天津工業大學.2017.
[6]余松煜,周源華,張瑞.數字圖像處理[M].上海:上海交通大學出版社.2007.
[7]王志明.數字圖像處理與分析[M].北京:清華大學出版社,2012.
[8]田原嫄,譚慶昌.亞像素邊緣定位算法過濾噪聲的分析[J].東北電力大學學報,2016( 5):43-47.
[9lPETROU M.BOSDOCJIANNI P.數字圖像處理疑難解析[M].北京:機械工業出版社,2005.
[10]甘泉,魏利勝,張平改.基于圖像處理的圓形工件尺寸檢測方法[J].黑龍江工業學院學報(綜合版),2017(7):39-43.
[11]劉國棟,劉炳國,陳鳳東,等.亞像素定位算法精度評價方法的研究[J].光學學報,2009( 12):3446-3451.
(編輯王永超)
