基于EtherCAT環網的MMC故障檢測與容錯控制
2023-06-25 02:28:07許文杰張江娜梅志敏
現代信息科技 2023年8期
許文杰 張江娜 梅志敏


摘? 要:模塊化多電平換流器(MMC)拓撲是目前高壓、大容量電力電子裝置的主要配置方案,但因其子模塊數量較多且易發生故障,從而嚴重影響系統的穩定性和可靠性。文章通過將EtherCAT工業以太網技術引入到MMC控制系統,提出一種基于EtherCAT環網拓撲的MMC子模塊分布式控制系統構架,它采用分布時鐘的EtherCAT環網通信實現子模塊控制單元的精確同步。針對子模塊IGBT開路故障,優化后的時序邏輯可完成子模塊故障信息反饋并大幅度縮短子模塊故障切除時間,通過對通信鏈路設置故障冗余,子模塊同步驅動信號和故障反饋信息得以穩定傳輸。最后,搭建了MMC仿真和實驗平臺,實驗結果驗證了EtherCAT環網控制MMC系統在子模塊故障檢測和容錯控制的有效性與可行性。
關鍵詞:模塊化多電平換流器;EtherCAT環網;分布式控制;故障冗余;容錯控制
中圖分類號:TM464? 文獻標識碼:A? 文章編號:2096-4706(2023)08-0051-05
Abstract: Modular Multi-Level Converter (MMC) topology is the main scheme of high voltage and large capacity power electronic devices, however, the sub-modules are many and easy to fail, which seriously affects the stability and reliability of the system. Through introducing EtherCAT industrial Ethernet technology into MMC control system, this paper proposes a MMC sub-module distributed control system architecture based on EtherCAT ring network topology. The precise synchronization of sub-module control units can be realized by using distributed clock EtherCAT ring network communication. Aiming at IGBT open-circuit fault of sub-module, the optimized sequential logic can complete the fault information feedback of sub-module and greatly shorten the fault removal time of sub-module. By setting fault redundancy for communication link, the synchronous driving signal and fault feedback information of sub-module can be transmitted stably. Finally, the simulation and experimental platform of MMC is built, and the experimental results verify the effectiveness and feasibility of EtherCAT ring network control MMC system in sub-module fault detection and fault-tolerant control.
Keywords: Modular Multi-Level Converter; EtherCAT ring network; distributed control; fault redundancy; fault-tolerant control
0? 引? 言
當模塊化多電平換流器MMC(Modular Multilevel Converter)向更高電壓等級擴展時,子模塊數量達到成百甚至上千,控制系統結構復雜,需要實時采集的數據量較大,子模塊發生故障概率較高[1]。傳統CAN現場總線、RS485等通信方式的網絡節點數與數據段最大長度有限,且通信速率受傳輸距離的
影響較大,難以滿足多個控制器之間協調運行以及高速通信的要求。針對上述問題,已有一些學者開展了相關研究,其中大部分采用光纖作為數據傳輸的介質,通過制定簡單可行的通信協議來提高節點同步精度[2],或是結合合理的時序邏輯關系與軟件算法來實現系統控制器的配合,完成子模塊故障的可靠監測。
隨著信息技術的不斷發展,工業以太網已進入全球工控自動化的標準通信技術之列,其中以太網控制自動化技術(EtherCAT)因其高速和高數據效率、支持多種物理拓撲結構等優點[3],在我國也被逐漸應用于伺服驅動、機器人等研究中[4]。相比于傳統通信模式,EtherCAT采用“集總幀”的思想,將多個EtherCAT子報文集合在一個數據幀中,可以在一個EtherCAT網段內掛載65 535個從站設備共同組成高性能的分散式I/O系統,并且EtherCAT提供的分布時鐘機制,可以使所有EtherCAT設備使用相同的系統時間,從而控制各設備任務的同步執行[5]。
基于EtherCAT突出的實時性、靈活性以及同步性等優勢,本文將EtherCAT引入到MMC控制系統,利用EtherCAT分布時鐘對各子模塊進行協調控制,并通過設計合理的時序邏輯關系,完成子模塊故障信息的反饋以及冗余子模塊的投切,縮短故障處理時間,同時對EtherCAT通信鏈路設置了故障冗余,以提高系統可靠性。最后,通過實驗驗證了該方案的合理性和可行性。
1? MMC拓撲與工作原理
三相MMC拓撲結構以及半橋子模塊結構如圖1所示,其中MMC由6個橋臂構成,每個橋臂包含若干個級聯的子模塊(SM1至SMN)和一個橋臂電抗器Larm,上、下橋臂合成為一個相單元。每個半橋子模塊中包含1個懸浮電容C0,2個IGBT(T1、T2),且每個IGBT反并聯一個二極管(D1、D2),USM為子模塊的輸出電壓,Uc為懸浮電容的電壓,iarm為流過子模塊的橋臂電流。通過控制開關管T1與T2在導通、關斷兩種狀態之間不斷切換,可實現子模塊的不同工作狀態[6]。
由MMC結構可知,相較于傳統逆變器,其子模塊內包含了大量儲能元件,在實際運行過程中需要監控的實時數據、控制目標數量眾多[7],隨著MMC向更高電壓等級擴展,多級控制單元協調控制難度逐漸增大,同時系統對通信速率的要求也相應提高。
2? 控制系統及其時序邏輯
2.1? 控制系統架構
為實現子模塊控制器與上層控制器間可靠、高速、大容量的數據交互,實時檢測子模塊狀態,保證系統穩定運行,本文在MMC控制系統中引入EtherCAT協議,其中通信網絡如圖2所示,是由一系列工作節點通過雙絞線以首尾相接方式構成的閉合環路。相比于點對點連接方式構成的星型拓撲,環型拓撲可以大幅度減少通信主節點的接口數量。
在引入EtherCAT后,整個MMC的控制系統架構如圖3所示,其中控制系統作為整個硬件結構的大腦,主要包括主站控制器和從站控制器。
在該控制系統中,主站通過EtherCAT環型網絡與各個從站通信,主站是整個MMC系統的運算及控制核心。每個子模塊對應一個EtherCAT從站,從站采用EtherCAT專用協議解碼芯片ESC(EtherCAT Slave Controller)與微處理器DSP,根據主站發送的調制波結合環流抑制等策略進行子模塊調制控制,并同時采集子模塊故障信息上傳到主站,從站組成如圖4所示。
2.2? 控制系統時序邏輯
MMC需要子模塊間協同工作,由于各個控制模塊功能不同,因而所選芯片也不盡相同,各個控制單元分別工作在各自的時鐘下,其晶振或電路參數之間的差異會導致子模塊驅動不同步。本文采用EtherCAT分布時鐘來保證各從站控制器間的同步。
分布時鐘機制使所有從站時鐘都同步于一個參考時鐘,與主站連接的第一個具有分布時鐘功能的從站時鐘即為參考時鐘。設定每個從站時鐘的時間控制環在數據幀的SOF(Start of Frame)到達時鎖存本地時鐘時刻tlocal(n),主站首先通過發送數據報文測得各從站傳輸延時tdelay(n)和時鐘初始偏移量toffset(n),然后從參考時鐘從站讀取其當前系統時間tsys_ref,并寫入各從站時鐘[7],之后從站通過公式計算得到本地時鐘漂移量?t:
?t=tlocal(n)-toffset(n)-tdelay(n)-tsys_ref
ESC控制本地時鐘時間的規律為每10 ns增加10個單位,當?t>0時,則每10 ns增加9個單位,當?t<0時,則每10 ns增加11個單位,以實現時鐘漂移補償。在經過補償之后,從站將計算出它的本地系統時間副本,這個時間用來產生同步信號Sync0標記,供從站DSP使用。
Sync0信號通常情況下為高電平,并周期性產生一段低電平信號,當Sync0信號由高電平變為低電平時,會產生一個中斷事件。時鐘同步示意圖如圖5所示。
在本控制系統中,主站向各從站發送調制波信號,各從站DSP經由ESC數據交換后在Sync0中斷事件中讀取調制波,并與載波信號相比較產生各個子模塊的驅動信號,以此保證各個子模塊投切一致。主從站時序邏輯如圖6所示。
3? 故障檢測與容錯方法
MMC中子模塊較多,運行過程中可能會發生故障,引發輸出畸變、環流增大、直流側電壓和電流振蕩等問題。子模塊常見故障類型可以分為2類:子模塊內部故障以及驅動故障。
3.1? 子模塊開路故障檢測
在實際工程中MMC包含IGBT數量相對較多,因而更易因散熱、沖擊電壓、沖擊電流等原因發生故障,系統一般會配備“熱備用”狀態下的冗余子模塊來確保系統無間斷運行[8]。IGBT故障可分為開路故障和短路故障兩種類型,短路故障破壞性較大,因此子模塊本地控制器一般會配備短路保護。開路故障會造成電壓、電流波形畸變等嚴重后果,影響系統正常運行,因此本文重點分析開路故障的情況。根據圖1,子模塊發生開路故障時輸出電壓特性分析如下:
當iarm<0,且T1開通、T2關斷時,若T1發生開路故障,則原懸浮電容放電回路被阻斷,Uc會持續增加,無法穩定在額定電容電壓附近,故障子模塊所在橋臂的橋臂電壓増大。
當iarm>0,且T1關斷、T2開通時,若T2發生開路故障,則對應的子模塊由切除狀態變為投入狀態,懸浮電容異常充電,Uc總體會呈上升趨勢,故障子模塊所在橋臂的橋臂電壓增大。
經整理可得子模塊IGBT開路故障對子模塊輸出電壓USM影響分析如表1所示。
上述分析說明,當子模塊IGBT發生開路故障時會導致子模塊電容電壓超出正常范圍,因此可通過對子模塊懸浮電容安裝電壓傳感器來實時檢測每個子模塊電容電壓值,當其超出設定檢測閾值,則可認為該子模塊發生了IGBT開路故障[9,10]。
由于每個子模塊采用單獨的控制器,因此當子模塊發生故障后,從站控制器需要將故障信息上傳至主站,主站經控制運算后完成故障子模塊的切除與冗余子模塊的投入。對于一個閉環系統來說,理論上如果采樣值能夠立刻用于控制運算,則生成的數據就避免了信號由采樣到上傳給主站進行數據處理并最終下發給各橋臂子模塊所產生的延遲時間,但是由于硬件原因無法實現,因此應當首先考慮減小采樣延遲,實現故障的快速切除,其次在將故障子模塊驅動信號發送給冗余子模塊的同時,還需要保證冗余子模塊與其他正常運行子模塊動作同步。
本文采用兩個PLC控制周期來完成子模塊故障信號采樣上傳以及控制指令下發,并將Sync0周期設置為子模塊載波周期,以確保每個載波周期子模塊間的驅動信號至少同步一次。考慮到為了使得冗余子模塊投入后能夠盡快和其他子模塊同步,PLC控制周期為Sync0周期的一半。系統的采樣時序圖如圖7所示。
3.2? 子模塊開路故障檢測
MMC系統中常見故障除電力電子器件故障外,還包括子模塊驅動故障。當系統通信網絡出現網口故障以及鏈路故障時則會導致子模塊驅動信號丟失,影響子模塊正常投切。為避免系統正常運行時數據幀傳輸受到影響,本文在上述控制系統基礎上實現通信鏈路冗余,提高以太網系統可靠性和可維護性。
由于采用環型拓撲組網方式,系統中第一個從站與最后一個從站均與主站相連接,因此本文主站采用雙網口,且每個網口均具備發送和接收以太網幀的功能。根據故障情況,圖8中列出了冗余系統正常工作和出現單點故障時的幀傳播策略:
如圖8,正常情況時,發送幀由M網口發送,經過從站節點的遍歷,經N網口接收,進入數據幀接收隊列;出現鏈路故障時,發送幀由M網口發送,遍歷至故障點處環回,經M網口接收,交由N網口發送,從另一個方向遍歷至故障點處環回,經N網口接收,進入數據幀接收隊列。
在鏈路冗余實現過程中,從站主要通過ESC實時檢測兩個網口PHY(Physical Layer)的數據連接信號LINK_MII(0)、LINK_MII(1)以及數據有效信號RX_DV(0)、RX_DV(1)來判斷當前所在鏈路狀態,因為在數據傳輸過程中,RX_DV信號只在數據有效時拉高。當無有效數據時,ESC將該鏈路端口狀態寫入對應寄存器,并通過全雙工鏈路將下行報文轉為上行報文送回主站,主站讀取各從站子報文工作計數器(Working Counter,WKC)以及數據鏈路狀態寄存器判斷子報文是否被正確處理,并將未處理的子報文交由另一以太網口發送至對應從站處理,從而實現系統在鏈路故障情況下的正常運行。
4? 實驗與驗證
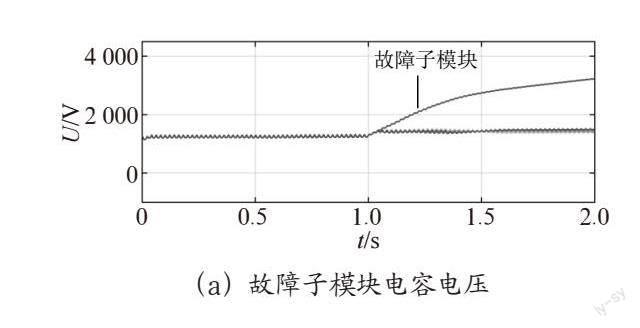
本文首先以MMC的A相上橋臂第一個子模塊在t為1 s時發生IGBT開路故障為例,搭建Simulink模型進行仿真分析,仿真結果如圖9所示,可以看出在1 s之后,故障子模塊電容電壓迅速上升,而正常子模塊電容電壓經過約0.05 s后基本穩定在1.4 kV。通過與正常工況對比,故障工況下該子模塊減少了一個放電階段,故電容電壓會持續上升,而隨著子模塊電容電壓的波動,輸出相電壓、直流母線電流、環流等也會產生相應波動。
為了驗證上述提出的基于EtherCAT環網拓撲的MMC子模塊開路故障檢測方法的可行性以及對鏈路冗余問題的解決,本文搭建了如圖10所示的相應實驗平臺。
主站采用工控機,基于TwinCAT 3軟件實現對各從站的控制,TwinCAT 3軟件將模塊化思想以及其靈活的軟件架構融入到整個控制平臺中,幾乎每一種控制應用程序都能在TwinCAT 3中實現。從站控制器ESC選用德國倍福公司研發的芯片ET1100,微處理器選用DSP芯片TMS320F28379。
當主站向各從站發送數據幀,從站間同步精度如圖11所示,由右圖可知兩從站間延時約為25 ns,從站同步精度較高。
設定子模塊載波頻率為1 kHz,根據上節分析,Sync0周期為1 ms,PLC控制周期為500 μs。當子模塊電壓超過額定電壓的120%時,認為子模塊存在過電壓[11]。假設某一時刻子模塊電容電壓超出設定閾值,可得到如下波形如圖12所示。
由圖12可知,從故障發生(紅色故障標志位由1變為0)到冗余子模塊投入使用(藍色標志位由1變為0),整個故障處理所需時間約為0.7 ms。
當使任意兩從站間通信線纜斷開,可得到以下TwinCAT 3 Scope所示波形,根據圖13可知,在設置了鏈路冗余后,當系統通信鏈路出現故障,主站與兩從站間仍然能夠保持正常數據傳輸。
根據以上實驗結果可知,本文方法能夠保證MMC控制系統中各控制單元同步,并且能夠快速有效地檢測子模塊開路故障,實現子模塊驅動信號的穩定傳輸。
5? 結? 論
本文首先針對模塊化多電平變流器系統存在的問題,設計了基于EtherCAT環網拓撲的MMC控制系統方案,該控制系統在多級控制器協同控制方面采用EtherCAT分布時鐘進行分級同步,有效地避免了不同控制單元由于自身晶振的差異所引起的不同步。另外本文在上述控制系統基礎上提出了一種子模塊故障檢測方法,該方法不僅具備子模塊開路故障檢測能力,還能夠避免系統通信故障,防止子模塊驅動信號丟失引起輸出電壓、電流畸變。最后本文搭建了相應實驗平臺,實驗結果證明了本文方法的有效性與可行性。相比傳統測量方法,本文方法在縮減系統硬件配置的同時也降低了子模塊開路故障檢測時間,能夠保證系統可靠穩定運行。
參考文獻:
[1] 張正發,李可軍,王卓迪,等.兼具開路故障診斷能力的MMC電容電壓測量方法 [J].電力系統自動化,2017,41(7):114-119+167.
[2] 李智福.風電場風力發電機的運行維護分析 [J].集成電路應用,2022,39(4):300-301.
[3] 蔣應偉,侯凱,陳永華,等.EtherCAT總線技術在現代電力電子裝置中的應用 [J].中國電力,2016,49(9):66-71+77.
[4] 鄭國良,張德煒,武藝泳,等.某高超聲速風洞攻角機構控制系統 [J].兵工自動化,2020,39(8):44-48.
[5] 朱良合,袁志昌,盛超,等.基于柔性直流輸電的異步互聯系統頻率支援控制方法綜述 [J].電力自動化設備,2019,39(2):84-92.
[6] ABUSHAFA O S H M,DAHIDAH M S A,GADOUE S M,et al. Submodule voltage estimation scheme in modular multi-level converters with reduced voltage sensors based on Kalmanfilter approach [J].IEEE Transactions on Industrial Electronics,2018,65(9):7025-7035.
[7] 李興源,曾琦,王渝紅,等. 柔性直流輸電系統控制研究綜述 [J].高電壓技術,2016,42(10):3025-3037.
[8] 黃守道,付雪婷,饒宏,等.基于Semi-Markov的模塊化多電平換流器的可靠性分析及其冗余配置策略 [J].電力自動化設備,2018,38(7):128-133.
[9] PICAS R,ZARAGOZA J,POU J,et al.New measuring technique for reducing the number of voltage sensors in modularmultilevel converters[J].IEEE Transactions on Power Electronics,2016,31(1):177-187.
[10] LI B B,SHI S L,WANG B,et al.Fault detection and tolerant control of single IGBT open-circuit failure in modular multilevel converters [J].IEEE Trans on Power Electronics,2016,31(4):3165-3176.
[11] 羅德榮,賀銳智,黃守道,等.模塊化多電平變流器子模塊電壓分組檢測中過電壓防護策略 [J].電工技術學報,2019,34(14):2957-2969.
作者簡介:許文杰(1988.07—),女,漢族,湖北宜昌人,教師,碩士,研究方向:計算機軟件工程。
