相控陣測控系統(tǒng)中的坐標(biāo)系轉(zhuǎn)換方法研究
2023-06-25 05:30:05潘恒康蔣浩仇明方孟景濤劉文魁
現(xiàn)代信息科技 2023年8期
潘恒康 蔣浩 仇明方 孟景濤 劉文魁

摘? 要:在相控陣測控系統(tǒng)中,通常由波束控制軟件將程序引導(dǎo)數(shù)據(jù)、數(shù)字引導(dǎo)數(shù)據(jù)以及目標(biāo)跟蹤數(shù)據(jù)等由各自坐標(biāo)系轉(zhuǎn)換成陣面設(shè)備采用坐標(biāo)系所對(duì)應(yīng)的數(shù)據(jù),從而實(shí)現(xiàn)引導(dǎo)波束指向目標(biāo)的功能。因此計(jì)算目標(biāo)在不同坐標(biāo)系下的位置是波束控制軟件需要處理的重要工作之一。文章結(jié)合工程經(jīng)驗(yàn),對(duì)相控陣測控系統(tǒng)中常用的各個(gè)坐標(biāo)系以及它們之間的轉(zhuǎn)換關(guān)系進(jìn)行分析,給出計(jì)算方法。相關(guān)計(jì)算方法描述清晰、簡潔,可供該領(lǐng)域相關(guān)人員參考。
關(guān)鍵詞:相控陣;測控;坐標(biāo)轉(zhuǎn)換
中圖分類號(hào):TN958.92? ? 文獻(xiàn)標(biāo)識(shí)碼:A? ? 文章編號(hào):2096-4706(2023)08-0060-04
Abstract: In the phased array TT&C system, the beam control software converts the program guidance data, digital guidance data and target tracking data from their respective coordinate systems into the corresponding data of the coordinate system used by the array equipment, for the purpose of guiding beam to the target. Therefore, calculating the position of the target in different coordinate systems is one of the important tasks to be handled by the beam control software. This paper combines with the engineering experience, analyzes frequently-used coordinates system and the transformation relationship between them in phased array TT&C system and gives the calculation method. The description of related calculation methods is clear and efficient, in hope of providing reference to relevant personnel in this field.
Keywords: phased array; TT&C; coordinate transformations
0? 引? 言
隨著我國航天測控領(lǐng)域的不斷發(fā)展以及在軌衛(wèi)星數(shù)量的快速增長,多目標(biāo)測控成為當(dāng)前航天測控發(fā)展的重要方向。相對(duì)于傳統(tǒng)拋物面天線的測控系統(tǒng),相控陣測控系統(tǒng)因其具有波束掃描速度快、可同時(shí)形成多波束等優(yōu)點(diǎn)[1],得到越來越多的應(yīng)用。
相控陣測控系統(tǒng)中,通常根據(jù)業(yè)務(wù)需要,由波束控制軟件將目標(biāo)的角度下發(fā)給數(shù)字波束形成(Digital Beam Forming, DBF)單元,控制陣面設(shè)備形成波束指向目標(biāo)。一般系統(tǒng)設(shè)計(jì)中,DBF在引導(dǎo)波束指向的過程中所采用的坐標(biāo)系通常為某一固定坐標(biāo)系,而波束控制軟件則根據(jù)業(yè)務(wù)需要,將不同坐標(biāo)系下的角度轉(zhuǎn)換成DBF所在坐標(biāo)系的角度下發(fā)給DBF,從而引導(dǎo)波束指向目標(biāo)。
目前相控陣測控系統(tǒng)可分為3種實(shí)現(xiàn)方案:單面相控陣天線加方位俯仰機(jī)械伺服方案、多面陣方案和球面陣方案[2]。另外,采用相控陣測控系統(tǒng)的測控站可分為固定站和機(jī)動(dòng)戰(zhàn)兩種。由于應(yīng)用場景不同,波束控制軟件和DBF之間的角度轉(zhuǎn)換方式也有不同。因此,坐標(biāo)系轉(zhuǎn)換問題是相控陣測控系統(tǒng)中波束控制軟件需要解決的重點(diǎn)問題之一。
由于相控陣測控系統(tǒng)是一種新的測控通信架構(gòu),相關(guān)研究并不充分,工程實(shí)現(xiàn)較少[3]。文獻(xiàn)[4]主要描述了固定站的坐標(biāo)系定義及轉(zhuǎn)換方法,其中并不涉及機(jī)動(dòng)站中的坐標(biāo)系轉(zhuǎn)換。另外,現(xiàn)在程序引導(dǎo)的角度多為站心坐標(biāo)系,可以不需要文獻(xiàn)[4]中定義的地平坐標(biāo)系。文獻(xiàn)[5]主要描述了機(jī)載相控陣天線對(duì)地面的通信過程,由于應(yīng)用場景的不同,一些使用到的坐標(biāo)系和轉(zhuǎn)換過程與相控陣測控系統(tǒng)并不相符。因此,本文結(jié)合實(shí)際經(jīng)驗(yàn),總結(jié)了相控陣測控系統(tǒng)中各種應(yīng)用場景下的坐標(biāo)系轉(zhuǎn)換方法,為波束控制軟件與DBF之間的坐標(biāo)系轉(zhuǎn)換的計(jì)算提供了理論依據(jù)。
1? 相控陣測控系統(tǒng)中的坐標(biāo)系
目前相控陣測控系統(tǒng)中,用到的坐標(biāo)系主要包括以下幾種,分別是地心坐標(biāo)系、站心坐標(biāo)系、視線坐標(biāo)系、載體坐標(biāo)系。其中,波束控制軟件所處理的數(shù)字引導(dǎo)數(shù)據(jù)一般處于地心直角坐標(biāo)系中、程序引導(dǎo)角度數(shù)據(jù)一般處于站心極坐標(biāo)系中,波束控制軟件接收到的角誤差一般處于視線極坐標(biāo)系中。對(duì)于DBF所采用的坐標(biāo)系往往與測控系統(tǒng)的陣面結(jié)構(gòu)、應(yīng)用場景相關(guān)聯(lián)。在單面相控陣天線加方位俯仰機(jī)械伺服的情況下,DBF對(duì)收發(fā)波束的引導(dǎo)采用視線極坐標(biāo)系;在多面陣和球面陣的情況下,則可以根據(jù)固定站或機(jī)動(dòng)站選擇站心極坐標(biāo)系或載體極坐標(biāo)系來引導(dǎo)波束指向。
1.1? 地心坐標(biāo)系
地心坐標(biāo)系是一種右手坐標(biāo)系,如圖1所示,其原定O為地球質(zhì)心,X軸指向格林尼治子午線與地球赤道的交點(diǎn),Z軸指向地球北極,Y軸垂直于XOZ平面。
1.2? 站心坐標(biāo)系
站心坐標(biāo)系是一種左手坐標(biāo)系,如圖2所示,其原點(diǎn)O為觀測設(shè)備的天線中心,即站心,Z軸與過原點(diǎn)的參考橢球面的法線重合,指向天頂為正,X軸垂直于Z軸,指向參考橢球的短半軸,向北為正,Y軸與X軸、Z軸垂直。
1.3? 視線坐標(biāo)系
視線坐標(biāo)系是一種左手坐標(biāo)系,如圖3所示,其原點(diǎn)O為觀測設(shè)備的天線中心,X軸為波束指向,Y軸指向水平方向,Z軸指向俯仰方向,目標(biāo)矢量OM,M向XOY平面做垂線MN,投影ON,其中,俯仰角誤差表示為∠MON,即目標(biāo)與波束指向的俯仰角差值,方位角誤差表示為∠XON,即目標(biāo)與波束指向的俯仰角的差值。
1.4? 載體坐標(biāo)系
載體坐標(biāo)系是一種右手坐標(biāo)系,如圖4所示,其原點(diǎn)O為載體的質(zhì)心,X軸為載體參考平面內(nèi)平行于車身軸線并指向前方,Y軸為載體參考平面內(nèi)垂直于車身軸線并指向右,Z軸垂直于載體參考平面指向上方。
在機(jī)動(dòng)站中,通常用一組姿態(tài)角來描述載體的空間姿態(tài)。當(dāng)獲取到姿態(tài)角后,即可將目標(biāo)的位置轉(zhuǎn)換到載體坐標(biāo)系中。姿態(tài)角包括:橫滾角,載體橫軸與水平線之間的夾角,向右滾為正,反之為負(fù);俯仰角,載體縱軸與水平面的夾角,向上為正,反之為負(fù);航向角,載體的縱軸與地球北極之間的夾角,順時(shí)針為正,又稱真航向角。
1.5? 直角坐標(biāo)系與極坐標(biāo)系的轉(zhuǎn)換關(guān)系
假設(shè)目標(biāo)在直角坐標(biāo)系中的坐標(biāo)為(x, y, z),在對(duì)應(yīng)極坐標(biāo)系中的坐標(biāo)為 ,其中極坐標(biāo)系的原點(diǎn)與直角坐標(biāo)系重合,以水平面(XOY)為基準(zhǔn)面,以X軸為極軸,ρ為目標(biāo)到原點(diǎn)的距離,θ為極坐標(biāo)下的方位角, 為極坐標(biāo)系下的俯仰角度。直角坐標(biāo)系與極坐標(biāo)系相互之間的轉(zhuǎn)換關(guān)系如下。
1.5.1? 直角坐標(biāo)系轉(zhuǎn)極坐標(biāo)系
2? 坐標(biāo)系轉(zhuǎn)換方法
2.1? 右手坐標(biāo)系下的轉(zhuǎn)換過程
一個(gè)空間直角坐標(biāo)系通常可以經(jīng)過平移和旋轉(zhuǎn)得到另一個(gè)空間直角坐標(biāo)系,其旋轉(zhuǎn)過程主要依賴變換矩陣[6],主要過程如下。
假設(shè)目標(biāo)位于同一原點(diǎn)的兩個(gè)參考系中,兩個(gè)參考系均為右手坐標(biāo)系,在參考系OXAYAZA中,目標(biāo)分量VA為VA=[xa? ya? za],而在參考系OXBYBZB中,目標(biāo)分量VB為VB=[xb? yb? zb],兩個(gè)參考系之間的變換關(guān)系為VB=LABVA,其中LAB即為從參考系OXAYAZA到參考系OXBYBZB的變換矩陣。
假設(shè)坐標(biāo)系OXAYAZA繞X軸,Y軸和Z軸逆時(shí)針轉(zhuǎn)過的角度分別為α、β和γ,其旋轉(zhuǎn)過程可由三個(gè)基本旋轉(zhuǎn)矩陣表示:
2.2? 左手坐標(biāo)系下的轉(zhuǎn)換過程
假設(shè)參考系OXAYAZA、參考系OXBYBZB均為左手坐標(biāo)系,若從參考系OXAYAZA旋轉(zhuǎn)到參考系OXBYBZB中,旋轉(zhuǎn)矩陣同上述L(α, β, γ),但需要將α、β和γ的取值改為繞X軸,Y軸和Z軸順時(shí)針轉(zhuǎn)過的角度即可。
2.3? 右手坐標(biāo)系與左手坐標(biāo)系之間的轉(zhuǎn)換
假設(shè)參考系OXAYAZA為右手坐標(biāo)系,參考系OXBYBZB為左手坐標(biāo)系,其相互之間的轉(zhuǎn)換,需要乘以轉(zhuǎn)換矩陣:
3? 相控陣測控系統(tǒng)中的坐標(biāo)轉(zhuǎn)換
在相控陣測控系統(tǒng)中,波束控制軟件通常在不同的工作模式(主要包括:數(shù)字引導(dǎo)、指向、程序引導(dǎo)、自跟蹤等)下,需要將目標(biāo)所在的空間位置從某一坐標(biāo)系中轉(zhuǎn)換到不同坐標(biāo)系中。其中站心坐標(biāo)系、載體坐標(biāo)系能夠直觀反映目標(biāo)位置信息與測控站的空間位置,因此通常需要在波束控制軟件界面上顯示,方便用戶觀測。由于不同的相控陣測控系統(tǒng)的陣面結(jié)構(gòu)、應(yīng)用場景有所不同,DBF根據(jù)系統(tǒng)設(shè)計(jì),可采用的坐標(biāo)系有視線坐標(biāo)系、站心坐標(biāo)系、載體坐標(biāo)系等。
數(shù)字引導(dǎo)工作模式中,一般用到的坐標(biāo)系轉(zhuǎn)換為:地心坐標(biāo)系轉(zhuǎn)站心坐標(biāo)系、站心坐標(biāo)系轉(zhuǎn)載體坐標(biāo)系、站心坐標(biāo)系轉(zhuǎn)視線坐標(biāo)系、載體坐標(biāo)系轉(zhuǎn)視線坐標(biāo)系、視線坐標(biāo)系轉(zhuǎn)載體坐標(biāo)系、視線坐標(biāo)系轉(zhuǎn)站心坐標(biāo)系、載體坐標(biāo)系轉(zhuǎn)站心坐標(biāo)系等。
指向和程序引導(dǎo)工作模式中,一般用到的坐標(biāo)系轉(zhuǎn)換為:站心坐標(biāo)系轉(zhuǎn)載體坐標(biāo)系、站心坐標(biāo)系轉(zhuǎn)視線坐標(biāo)系、載體坐標(biāo)系轉(zhuǎn)視線坐標(biāo)系、視線坐標(biāo)系轉(zhuǎn)載體坐標(biāo)系、視線坐標(biāo)系轉(zhuǎn)站心坐標(biāo)系、載體坐標(biāo)系轉(zhuǎn)站心坐標(biāo)系等。
自跟蹤工作模式中,一般用到的坐標(biāo)系轉(zhuǎn)換為視線坐標(biāo)系轉(zhuǎn)載體坐標(biāo)系、視線坐標(biāo)系轉(zhuǎn)站心坐標(biāo)系、載體坐標(biāo)系轉(zhuǎn)站心坐標(biāo)系等。
雖然相控陣測控系統(tǒng)中的陣面結(jié)構(gòu)、應(yīng)用場景等會(huì)使得波束控制軟件在處理坐標(biāo)系轉(zhuǎn)換的問題上變得復(fù)雜,但是均可通過基本的轉(zhuǎn)換方法實(shí)現(xiàn)。基本的坐標(biāo)系轉(zhuǎn)換方法包括:地心坐標(biāo)系轉(zhuǎn)站心坐標(biāo)系、站心坐標(biāo)系與視線坐標(biāo)系的相互轉(zhuǎn)換、站心坐標(biāo)系與載體坐標(biāo)系的相互轉(zhuǎn)換、載體坐標(biāo)系與視線坐標(biāo)系的相互轉(zhuǎn)換。
3.1? 地心坐標(biāo)系轉(zhuǎn)站心坐標(biāo)系
假設(shè)目標(biāo)在地心坐標(biāo)系中的位置(xG, yG, zG),在站心坐標(biāo)系中的位置為(x, y, z),測控站的經(jīng)緯高(Lon,Lat,Ht),其轉(zhuǎn)換過程為:
其中,a為地球平均半徑,我國常用的大地坐標(biāo)系是2000國家大地坐標(biāo)系(CGCS2000),CGCS2000采用橢球第一偏心率為0.081 819 191 042 8[7],地球赤道半徑為6 378 137 m。
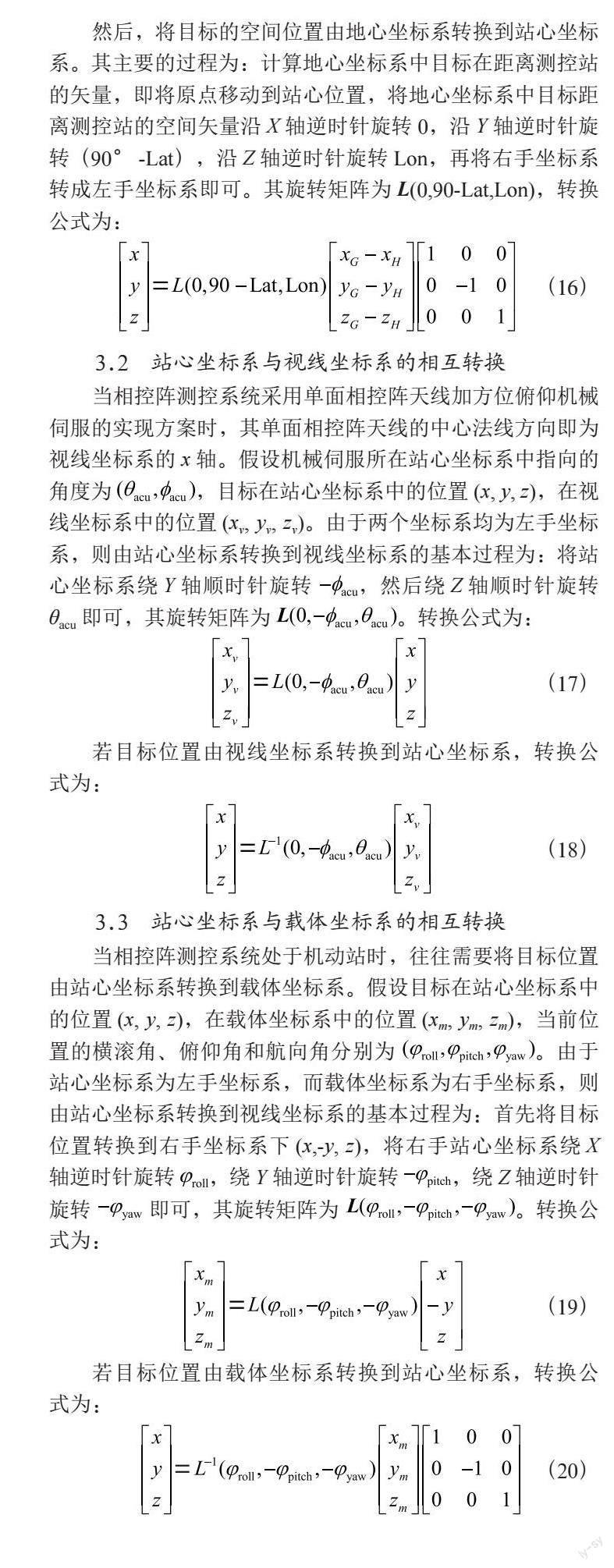
然后,將目標(biāo)的空間位置由地心坐標(biāo)系轉(zhuǎn)換到站心坐標(biāo)系。其主要的過程為:計(jì)算地心坐標(biāo)系中目標(biāo)在距離測控站的矢量,即將原點(diǎn)移動(dòng)到站心位置,將地心坐標(biāo)系中目標(biāo)距離測控站的空間矢量沿X軸逆時(shí)針旋轉(zhuǎn)0,沿Y軸逆時(shí)針旋轉(zhuǎn)(90°-Lat),沿Z軸逆時(shí)針旋轉(zhuǎn)Lon,再將右手坐標(biāo)系轉(zhuǎn)成左手坐標(biāo)系即可。其旋轉(zhuǎn)矩陣為L(0,90-Lat,Lon),轉(zhuǎn)換公式為:
3.2? 站心坐標(biāo)系與視線坐標(biāo)系的相互轉(zhuǎn)換
當(dāng)相控陣測控系統(tǒng)采用單面相控陣天線加方位俯仰機(jī)械伺服的實(shí)現(xiàn)方案時(shí),其單面相控陣天線的中心法線方向即為視線坐標(biāo)系的x軸。假設(shè)機(jī)械伺服所在站心坐標(biāo)系中指向的角度為 ,目標(biāo)在站心坐標(biāo)系中的位置(x, y, z),在視線坐標(biāo)系中的位置(xv, yv, zv)。由于兩個(gè)坐標(biāo)系均為左手坐標(biāo)系,則由站心坐標(biāo)系轉(zhuǎn)換到視線坐標(biāo)系的基本過程為:將站心坐標(biāo)系繞Y軸順時(shí)針旋轉(zhuǎn) ,然后繞Z軸順時(shí)針旋轉(zhuǎn)θacu即可,其旋轉(zhuǎn)矩陣為 。轉(zhuǎn)換公式為:
3.3? 站心坐標(biāo)系與載體坐標(biāo)系的相互轉(zhuǎn)換
當(dāng)相控陣測控系統(tǒng)處于機(jī)動(dòng)站時(shí),往往需要將目標(biāo)位置由站心坐標(biāo)系轉(zhuǎn)換到載體坐標(biāo)系。假設(shè)目標(biāo)在站心坐標(biāo)系中的位置(x, y, z),在載體坐標(biāo)系中的位置(xm, ym, zm),當(dāng)前位置的橫滾角、俯仰角和航向角分別為 。由于站心坐標(biāo)系為左手坐標(biāo)系,而載體坐標(biāo)系為右手坐標(biāo)系,則由站心坐標(biāo)系轉(zhuǎn)換到視線坐標(biāo)系的基本過程為:首先將目標(biāo)位置轉(zhuǎn)換到右手坐標(biāo)系下(x,-y, z),將右手站心坐標(biāo)系繞X軸逆時(shí)針旋轉(zhuǎn) ,繞Y軸逆時(shí)針旋轉(zhuǎn) ,繞Z軸逆時(shí)針旋轉(zhuǎn)? 即可,其旋轉(zhuǎn)矩陣為 。轉(zhuǎn)換公式為:
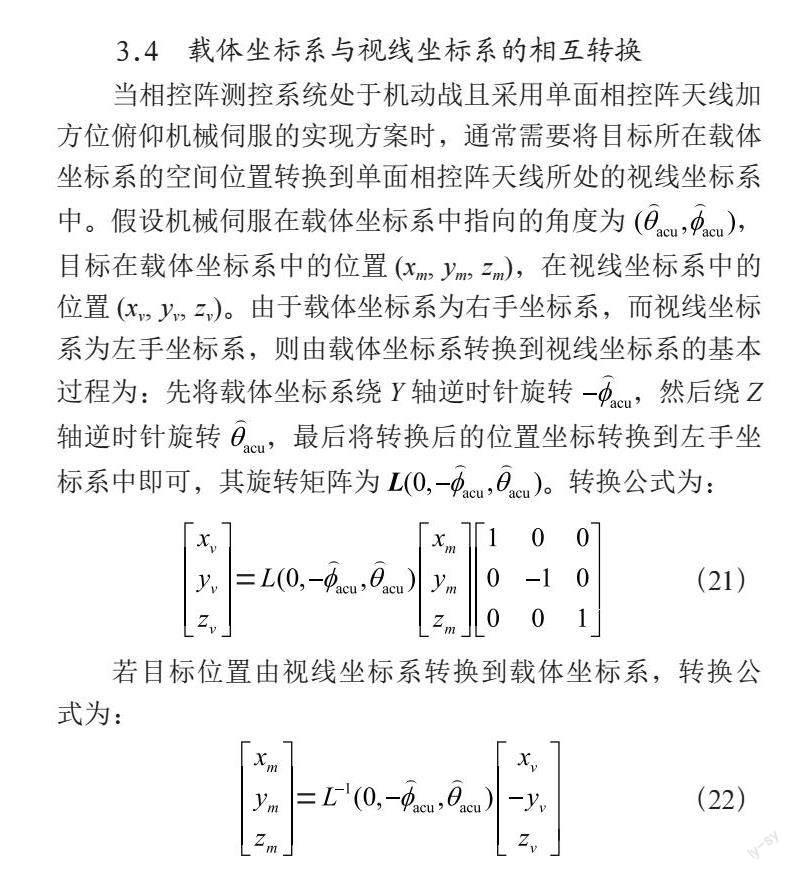
3.4? 載體坐標(biāo)系與視線坐標(biāo)系的相互轉(zhuǎn)換
當(dāng)相控陣測控系統(tǒng)處于機(jī)動(dòng)戰(zhàn)且采用單面相控陣天線加方位俯仰機(jī)械伺服的實(shí)現(xiàn)方案時(shí),通常需要將目標(biāo)所在載體坐標(biāo)系的空間位置轉(zhuǎn)換到單面相控陣天線所處的視線坐標(biāo)系中。假設(shè)機(jī)械伺服在載體坐標(biāo)系中指向的角度為 ,目標(biāo)在載體坐標(biāo)系中的位置(xm, ym, zm),在視線坐標(biāo)系中的位置(xv, yv, zv)。由于載體坐標(biāo)系為右手坐標(biāo)系,而視線坐標(biāo)系為左手坐標(biāo)系,則由載體坐標(biāo)系轉(zhuǎn)換到視線坐標(biāo)系的基本過程為:先將載體坐標(biāo)系繞Y軸逆時(shí)針旋轉(zhuǎn) ,然后繞Z軸逆時(shí)針旋轉(zhuǎn) ,最后將轉(zhuǎn)換后的位置坐標(biāo)轉(zhuǎn)換到左手坐標(biāo)系中即可,其旋轉(zhuǎn)矩陣為 。轉(zhuǎn)換公式為:
4? 結(jié)? 論
本文主要針對(duì)相控陣測控系統(tǒng),根據(jù)工程經(jīng)驗(yàn),總結(jié)其中常用的坐標(biāo)系并分析各種坐標(biāo)系之間的轉(zhuǎn)換關(guān)系。相關(guān)的轉(zhuǎn)換方法已成功應(yīng)用于我國多套相控陣測控系統(tǒng)中,為后續(xù)相關(guān)工程應(yīng)用提供理論依據(jù)。
參考文獻(xiàn):
[1] 俞力,馬海波.相控陣天線的相位方向圖研究 [J].現(xiàn)代信息科技,2020,4(20):67-70.
[2] 吳海洲,王鵬毅,郭肅麗.全空域相控陣測控系統(tǒng)波束形成分析 [J].無線電工程,2011,41(11):13-15.
[3] 杜丹,王文政,扈景召.全空域球面相控陣測控系統(tǒng)角跟蹤方法概論 [J].電訊技術(shù),2021,61(7):800-806.
[4] 耿虎軍,郭肅麗,王鵬毅,等.相控陣多目標(biāo)測控系統(tǒng)中的坐標(biāo)轉(zhuǎn)換 [J].飛行器測控學(xué)報(bào),2010,29(6):24-28.
[5] 榮笑,張彬誠.一種相控陣天線波束指向角計(jì)算方法 [J].現(xiàn)代信息科技,2021,5(21):78-81.
[6] 潘恒康.船用導(dǎo)航雷達(dá)數(shù)據(jù)處理技術(shù)研究 [D].哈爾濱:哈爾濱工業(yè)大學(xué),2017.
[7] 陳成,金立新,李忠美.常用緯度與地心緯度差異分析 [J].海軍工程大學(xué)學(xué)報(bào),2018,30(2):72-77.
作者簡介:潘恒康(1992—),男,漢族,山東德州人,工程師,碩士,研究方向:航天測控軟件設(shè)計(jì)與開發(fā);蔣浩(1995—),男,漢族,重慶云陽人,助理工程師,本科,研究方向:航天測運(yùn)控;仇明方(1991—),男,漢族,山東青島人,技師,本科,研究方向:測量與控制;孟景濤(1985—),男,漢族,河北邢臺(tái)人,工程師,本科,研究方向:航天測控軟件設(shè)計(jì)與開發(fā);劉文魁(1990—),男,漢族,山東濱州人,測控技師,本科,研究方向:航天測運(yùn)控。
