基于風(fēng)機(jī)葉片應(yīng)力監(jiān)測(cè)的光纖光柵解調(diào)電路的研究與設(shè)計(jì)
2023-06-25 21:00:27孫智鵬管迎春何君陳平田勇
現(xiàn)代信息科技 2023年8期
孫智鵬 管迎春 何君 陳平 田勇


摘? 要:光纖光柵傳感器是傳感解調(diào)系統(tǒng)的主要感知器件,解調(diào)系統(tǒng)能夠?qū)鞲衅鞲袦y(cè)到的光信號(hào)轉(zhuǎn)變?yōu)殡娦盘?hào),用于系統(tǒng)后期對(duì)數(shù)據(jù)的處理與分析,以實(shí)現(xiàn)解調(diào)系統(tǒng)的監(jiān)測(cè)功能。為解決解調(diào)系統(tǒng)速度低、價(jià)格高、通道少等問題,設(shè)計(jì)一種基于光纖光柵多通道的解調(diào)系統(tǒng),利用SPI通信協(xié)議將STM32與FPGA建立主從機(jī)制,通過AD9226與CD4051相結(jié)合的方式,實(shí)現(xiàn)了高速、高精度、多通道的光纖光柵信號(hào)解調(diào)。系統(tǒng)最終可以同時(shí)掃描16個(gè)通道,測(cè)量范圍為1528~1568 nm。
關(guān)鍵詞:光纖光柵;解調(diào)系統(tǒng);FPGA;AD9226;CD4051
中圖分類號(hào):TP23? ? 文獻(xiàn)標(biāo)識(shí)碼:A? ? 文章編號(hào):2096-4706(2023)08-0171-04
Abstract: Fiber Bragg Grating (FBG) sensor is the main sensing device of the sensor demodulation system. The demodulation system can convert the optical signal sensed by the sensor into an electrical signal for the later processing and analysis of data in the system to achieve the monitoring function of the demodulation system. In order to solve the problems of low speed, high price and small capacity of demodulation system, a multi-channel demodulation system based on FBG is designed. The master slave mechanism is established by using SPI communication protocol between STM32 and FPGA. Through the combination of AD9226 and CD4051, high-speed, high-precision and multi-channel FBG signal demodulation is realized. Finally, the system can scan 16 channels at the same time, and the measurement range is 1528~1568 nm.
Keywords: Fiber Bragg Grating; demodulation system; FPGA; AD9226; CD4051
0? 引? 言
光纖布拉格光柵(Fiber Bragg Grating, FBG)是業(yè)界公認(rèn)的種類最多、商用化程度最高﹑應(yīng)用領(lǐng)域最廣泛的一類光纖傳感技術(shù)[1]。波長(zhǎng)傳感解調(diào)是光纖光柵解調(diào)的主要方式之一,當(dāng)光纖光柵傳感器所處環(huán)境的待測(cè)量發(fā)生變化時(shí),可以通過波長(zhǎng)漂移的多少來判斷待測(cè)量變化的大小,與波長(zhǎng)漂移量相對(duì)應(yīng)的即反射譜中心波長(zhǎng)位置的變化量[2],因此準(zhǔn)確、迅速地解調(diào)出光譜中心波長(zhǎng)是實(shí)現(xiàn)光纖光柵監(jiān)測(cè)系統(tǒng)高精度測(cè)量的重要保障。近幾年,光纖光柵傳感解調(diào)技術(shù)發(fā)展迅速,應(yīng)用領(lǐng)域更為廣泛,在選擇解調(diào)設(shè)備時(shí),解調(diào)的精度與速度也有更嚴(yán)格的要求,但目前的解調(diào)產(chǎn)品在速度、價(jià)格、體積等方面無(wú)法兼顧,使得光纖光柵傳感技術(shù)動(dòng)態(tài)測(cè)量領(lǐng)域的細(xì)微變化無(wú)法被速率低的解調(diào)設(shè)備監(jiān)測(cè)到,在一定程度上限制了光纖光柵的工程應(yīng)用。隨著物聯(lián)網(wǎng)技術(shù)的迅速發(fā)展,在復(fù)雜環(huán)境下物理量的變化也需被準(zhǔn)確測(cè)量,而嵌入式的光纖傳感解調(diào)設(shè)備因便攜性好、系統(tǒng)性強(qiáng)、體積小等優(yōu)點(diǎn)被廣泛應(yīng)用于航天設(shè)備[3]、橋梁監(jiān)測(cè)[4]、油氣管道[5]等復(fù)雜工程之中。葉片是風(fēng)電機(jī)組重要組成部分,一旦損壞將導(dǎo)致停機(jī),故對(duì)風(fēng)機(jī)葉片狀態(tài)監(jiān)測(cè)十分必要[6]。
本文設(shè)計(jì)了一種基于風(fēng)機(jī)葉片應(yīng)力監(jiān)測(cè)的光纖光柵解調(diào)電路,采用STM32407作為主機(jī),搭配高速FPGA芯片作為從機(jī),12位精度、65 Msps采樣率的高速模數(shù)轉(zhuǎn)換器AD9226作為A/D。能夠在風(fēng)機(jī)葉片復(fù)雜的工作環(huán)境下完成數(shù)據(jù)采集,實(shí)現(xiàn)高速多通道的光纖光柵信號(hào)解調(diào)。
1? 總體設(shè)計(jì)方案
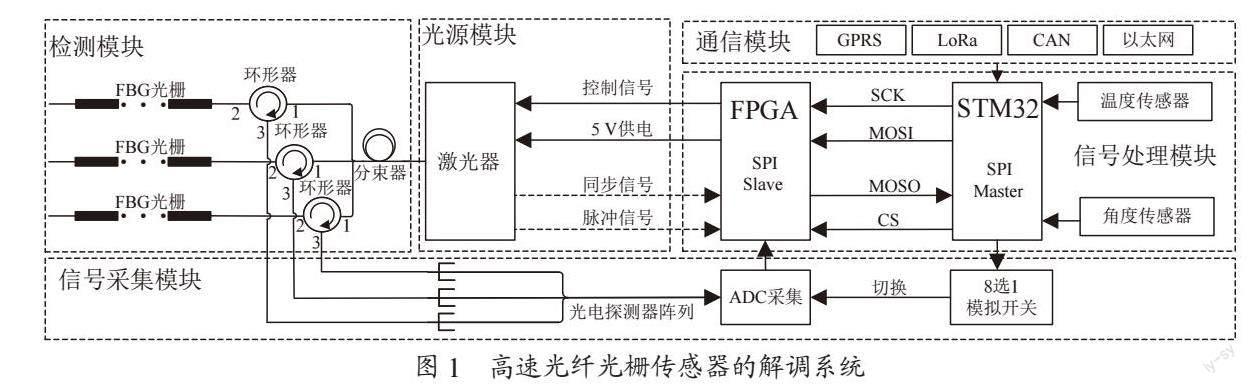
根據(jù)光纖光柵傳感器的解調(diào)原理,設(shè)計(jì)一款具有16通道的高速光纖光柵解調(diào)系統(tǒng),如圖1所示,主要包括光路和電路兩個(gè)部分,共分為檢測(cè)模塊、光源模塊、通信模塊以及采集和處理模塊五個(gè)模塊。
1.1? 系統(tǒng)光路設(shè)計(jì)
光路部分包括光源模塊及檢測(cè)模塊,激光器發(fā)射出的特定范圍內(nèi)的激光束,在分束器的作用下,將激光束按多路進(jìn)行重新分配后進(jìn)入環(huán)形器的1端口,由2端口發(fā)射至光纖光柵傳感器,傳感器將特定波長(zhǎng)的光譜進(jìn)行反射,進(jìn)入環(huán)形器2端口,最后由環(huán)形器3端口傳輸至光電探測(cè)器,從而完成光信號(hào)到電信號(hào)的轉(zhuǎn)化過程。
1.2? 系統(tǒng)電路設(shè)計(jì)
電路部分包括信號(hào)采集模塊,信號(hào)處理模塊以及通信模塊,高速ADC與模擬開關(guān)組合可以實(shí)現(xiàn)多通道對(duì)信號(hào)采集,F(xiàn)PGA作為從機(jī),將采集到的信號(hào)進(jìn)行數(shù)字濾波,解調(diào)以及存儲(chǔ)后通過SPI與主機(jī)STM32進(jìn)行數(shù)據(jù)通信,STM32再通過TCP/IP協(xié)議將數(shù)據(jù)發(fā)送至上位機(jī),板載多種通信接口,以保障不同應(yīng)用場(chǎng)景的使用,同時(shí)通過溫度傳感器和角度傳感器對(duì)解調(diào)設(shè)備本身作狀態(tài)監(jiān)測(cè)。
1.3? 系統(tǒng)解調(diào)過程
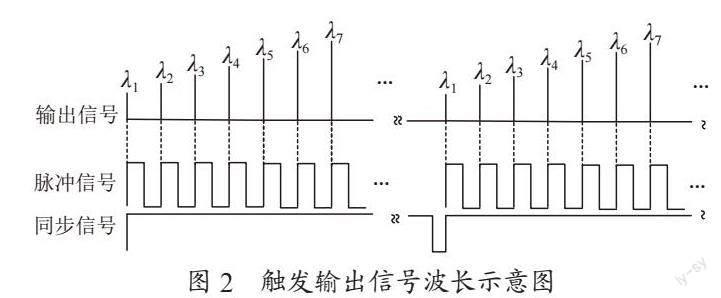
各個(gè)部分的組成對(duì)整個(gè)系統(tǒng)的波長(zhǎng)分辨率、系統(tǒng)簡(jiǎn)潔性和可復(fù)用規(guī)模,以及對(duì)傳感器取樣速率都有著至關(guān)重要的影響[7]。在STM32主機(jī)中設(shè)定可調(diào)諧激光器的步進(jìn)值、掃描頻率及激光波長(zhǎng)輸出的范圍。在本系統(tǒng)中將循環(huán)輸出功率設(shè)置為20 mw,最小步進(jìn)值設(shè)置為8 pm,根據(jù)可調(diào)諧激光器參數(shù)將波長(zhǎng)范圍為1 527.605 nm至1 568.362 nm。可調(diào)諧激光器輸出兩路不同的信號(hào),如圖2所示。同步信號(hào)在掃描周期開始的第一個(gè)波長(zhǎng)輸出時(shí),產(chǎn)生一個(gè)同步的上升沿,脈沖信號(hào)則在每一個(gè)波長(zhǎng)輸出時(shí)都產(chǎn)生一個(gè)同步的上升沿。接收端在同步信號(hào)的上升沿到來時(shí),開始計(jì)數(shù),記錄脈沖信號(hào)的個(gè)數(shù),即可通過步進(jìn)值與起始波長(zhǎng)位置得到反射譜的波長(zhǎng)信息,根據(jù)光纖光柵傳感器的不同,反射譜的波長(zhǎng)值也互不相同,反射的光譜經(jīng)光纖環(huán)形器返回至光電探測(cè)器。
使光纖光柵傳感器的信號(hào)得到實(shí)時(shí)解調(diào)效果,本系統(tǒng)通過STM32主機(jī)對(duì)可調(diào)諧激光器設(shè)置為連續(xù)采集模式。先將可調(diào)諧激光器進(jìn)行初始化設(shè)置,對(duì)步進(jìn)精度、采樣點(diǎn)數(shù)和觸發(fā)模式進(jìn)行定值設(shè)置。系統(tǒng)的采集機(jī)制根據(jù)STM32主機(jī)內(nèi)部程序設(shè)置觸發(fā),觸發(fā)信號(hào)為激光器輸出的同步信號(hào)。掃描激光器通過TTL或RS232與STM32主機(jī)進(jìn)行連接,再設(shè)置輸出的步進(jìn)精度與掃描頻率,同時(shí)返回初始化成功信息至STM32主機(jī),開啟信號(hào)采集。當(dāng)收到同步信號(hào)的上升沿時(shí),采集系統(tǒng)對(duì)識(shí)別信號(hào)是否正常進(jìn)行閾值判斷,同時(shí)對(duì)脈沖信號(hào)和光纖光柵傳感器反射的信號(hào)進(jìn)行采集。通過STM32控制的通信模塊,將采集的數(shù)據(jù)傳輸至后臺(tái),同時(shí)進(jìn)行存儲(chǔ)連續(xù)監(jiān)測(cè)。
2? 關(guān)鍵電路設(shè)計(jì)
2.1? A/D數(shù)據(jù)采集模塊
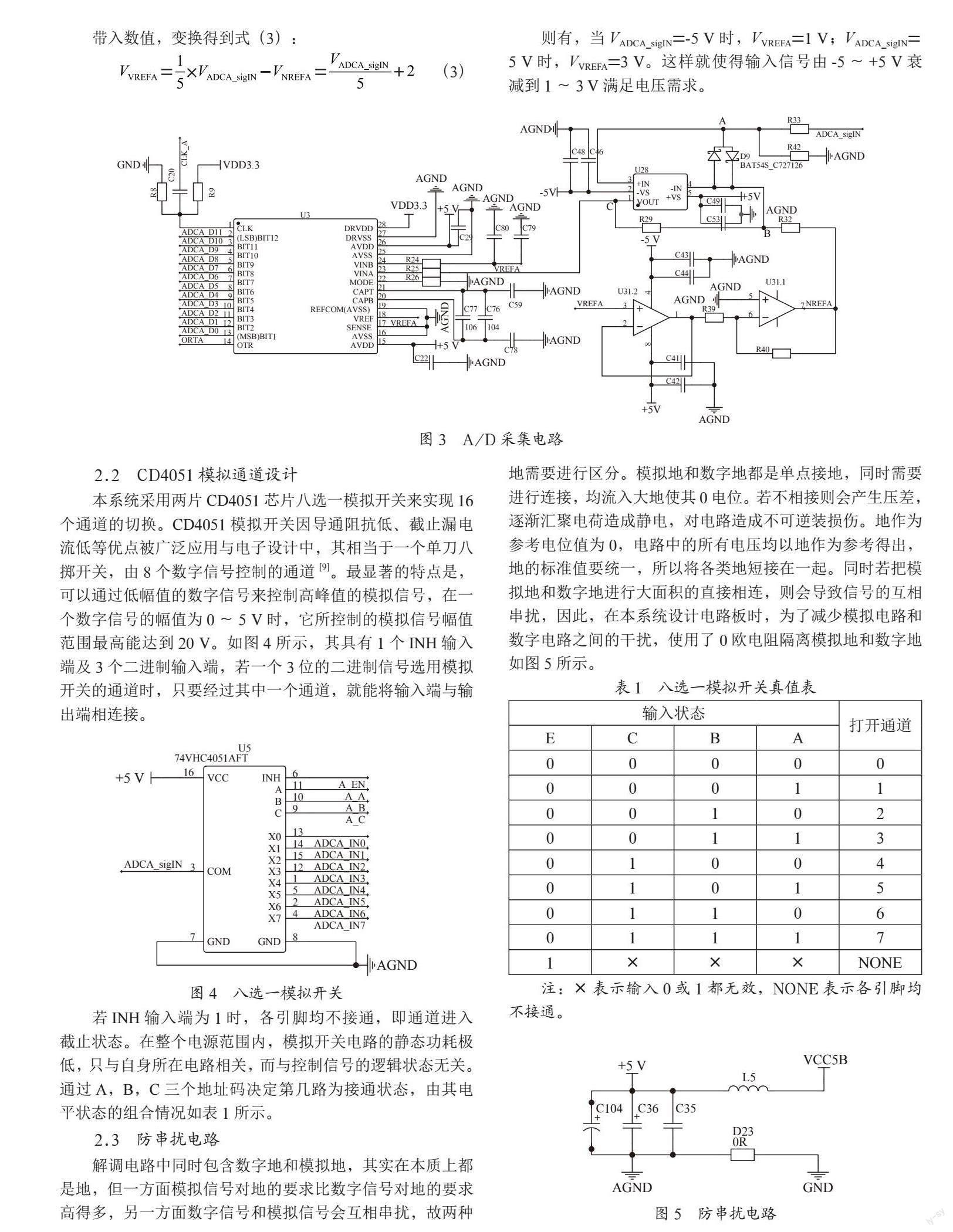
為了保證模數(shù)信號(hào)的高速轉(zhuǎn)換,本系統(tǒng)采用ADI公司生產(chǎn)的AD9226芯片,該器件采樣速率高達(dá)65 Msps,具備12位的采樣精度,擁有尺寸小、功耗低、信噪比高等優(yōu)點(diǎn),在信號(hào)處理、設(shè)備儀器等領(lǐng)域有廣泛應(yīng)用[8]。AD9226芯片內(nèi)部,集成了具有高性能的采樣保持放大器與參考電壓源,多級(jí)差分的流水線架構(gòu),能對(duì)輸出值進(jìn)行誤差校正,保證在整個(gè)工作溫度范圍內(nèi)不存在失碼現(xiàn)象,AD9226芯片的輸入能夠與解調(diào)、超聲和通信系統(tǒng)實(shí)現(xiàn)輕松對(duì)接,運(yùn)用自身差分輸入結(jié)構(gòu),使其動(dòng)態(tài)性能具有極大優(yōu)勢(shì)。AD9226芯片內(nèi)部可提供1 V或2 V兩種參考電壓源,本系統(tǒng)中采用2 V作為參考電壓。AD9226芯片電壓輸入范圍為1.0~3.0 V,由于系統(tǒng)外部電壓范圍達(dá)到-5~+5 V,因此,需要利用電壓反饋型的高速放大器AD8065芯片與常規(guī)運(yùn)算放大器TL072芯片相結(jié)合的方式在AD9226的前端設(shè)計(jì)一個(gè)衰減電路。其輸入與輸出轉(zhuǎn)換式為:
其中Vin為輸入電壓值,Vout為輸出電壓值。A/D轉(zhuǎn)換出的數(shù)字信號(hào),只需按式(1)反向運(yùn)算即可得到輸入電壓的真實(shí)數(shù)值,多通道解調(diào)系統(tǒng)中單路A/D采集電路如圖3所示。
將SENSE引腳與模擬地相連形成低電平,此時(shí)芯片使用內(nèi)部參考電壓源,內(nèi)部參考電壓從VREFA輸出,大小為2 V,同時(shí)將此電壓提供給衰減電路。
為采集范圍更大的電壓數(shù)據(jù),需要在AD模數(shù)轉(zhuǎn)換電路前加入一個(gè)電位移動(dòng)與衰減電路。在該電路的作用下,能夠?qū)?5~+5 V的電壓轉(zhuǎn)換為1~3 V。輸入的VREFA參考電壓2 V,由AD9226的VREFA引腳提供,經(jīng)過電壓跟隨器U31.2和反向比例放大器U1.1得到NREFA=-2 V為定值,因AD8056組成電壓負(fù)反饋型放大器,如式(2):
5 V時(shí),VVREFA=3 V。這樣就使得輸入信號(hào)由-5~+5 V衰減到1~3 V滿足電壓需求。
2.2? CD4051模擬通道設(shè)計(jì)
本系統(tǒng)采用兩片CD4051芯片八選一模擬開關(guān)來實(shí)現(xiàn)16個(gè)通道的切換。CD4051模擬開關(guān)因?qū)ㄗ杩沟汀⒔刂孤╇娏鞯偷葍?yōu)點(diǎn)被廣泛應(yīng)用與電子設(shè)計(jì)中,其相當(dāng)于一個(gè)單刀八擲開關(guān),由8個(gè)數(shù)字信號(hào)控制的通道[9]。最顯著的特點(diǎn)是,可以通過低幅值的數(shù)字信號(hào)來控制高峰值的模擬信號(hào),在一個(gè)數(shù)字信號(hào)的幅值為0~5 V時(shí),它所控制的模擬信號(hào)幅值范圍最高能達(dá)到20 V。如圖4所示,其具有1個(gè)INH輸入端及3個(gè)二進(jìn)制輸入端,若一個(gè)3位的二進(jìn)制信號(hào)選用模擬開關(guān)的通道時(shí),只要經(jīng)過其中一個(gè)通道,就能將輸入端與輸出端相連接。
若INH輸入端為1時(shí),各引腳均不接通,即通道進(jìn)入截止?fàn)顟B(tài)。在整個(gè)電源范圍內(nèi),模擬開關(guān)電路的靜態(tài)功耗極低,只與自身所在電路相關(guān),而與控制信號(hào)的邏輯狀態(tài)無(wú)關(guān)。通過A,B,C三個(gè)地址碼決定第幾路為接通狀態(tài),由其電平狀態(tài)的組合情況如表1所示。
2.3? 防串?dāng)_電路
解調(diào)電路中同時(shí)包含數(shù)字地和模擬地,其實(shí)在本質(zhì)上都是地,但一方面模擬信號(hào)對(duì)地的要求比數(shù)字信號(hào)對(duì)地的要求高得多,另一方面數(shù)字信號(hào)和模擬信號(hào)會(huì)互相串?dāng)_,故兩種地需要進(jìn)行區(qū)分。模擬地和數(shù)字地都是單點(diǎn)接地,同時(shí)需要進(jìn)行連接,均流入大地使其0電位。若不相接則會(huì)產(chǎn)生壓差,逐漸匯聚電荷造成靜電,對(duì)電路造成不可逆裝損傷。地作為參考電位值為0,電路中的所有電壓均以地作為參考得出,地的標(biāo)準(zhǔn)值要統(tǒng)一,所以將各類地短接在一起。同時(shí)若把模擬地和數(shù)字地進(jìn)行大面積的直接相連,則會(huì)導(dǎo)致信號(hào)的互相串?dāng)_,因此,在本系統(tǒng)設(shè)計(jì)電路板時(shí),為了減少模擬電路和數(shù)字電路之間的干擾,使用了0歐電阻隔離模擬地和數(shù)字地如圖5所示。
3? 多路解調(diào)電路板
對(duì)電路板進(jìn)行不加電調(diào)試,先用手觸碰周圍金屬物體,泄放掉靜電,防止因?yàn)槿梭w帶的靜電對(duì)電路板產(chǎn)生不可逆轉(zhuǎn)的損害,再用萬(wàn)用表對(duì)電路板的元件及關(guān)鍵位置進(jìn)行檢查,如電源輸入是否短路、管腳是否存在虛焊、電解電容是否焊反等[10]。確認(rèn)無(wú)誤后,使用數(shù)字直流電源對(duì)電路板進(jìn)行加電調(diào)試,在電路板設(shè)計(jì)的過程中,所有電源輸入端均加入了發(fā)光二極管指示電路,能夠直觀地顯示電源供電情況。解調(diào)電路板實(shí)物圖如圖6所示。
4? 應(yīng)? 用
將解調(diào)電路板進(jìn)行封裝,安裝至風(fēng)機(jī)輪轂內(nèi)電氣控制箱處,如圖7所示,將八個(gè)光柵傳感器串聯(lián)呈一路鋪設(shè)在葉片內(nèi)表面。光柵傳感器與所設(shè)計(jì)解調(diào)系統(tǒng)進(jìn)行連接后,可以從示波器中清楚觀察到反射譜波形顯示情況,如圖8所示。
5? 結(jié)? 論
本文提出了一種基于風(fēng)機(jī)葉片應(yīng)力監(jiān)測(cè)的光纖光柵解調(diào)電路的設(shè)計(jì),本設(shè)計(jì)結(jié)合STM32和FPGA的優(yōu)勢(shì),能夠滿足風(fēng)機(jī)發(fā)電機(jī)槳葉應(yīng)力監(jiān)測(cè)需求。通過設(shè)計(jì)AD9226的外圍電路,ADC轉(zhuǎn)換電路的基礎(chǔ)上提供了其衰減電路,將模數(shù)轉(zhuǎn)換器的輸入電壓范圍從-5~5 V衰減至1~3 V。通過將兩路八選一模擬開關(guān)與AD9226相結(jié)合,可以實(shí)現(xiàn)16個(gè)通道同時(shí)采樣,充分發(fā)揮FPGA并行控制能力,將多路數(shù)據(jù)進(jìn)行實(shí)時(shí)采集,實(shí)現(xiàn)了對(duì)光纖光柵數(shù)據(jù)的高速處理。
參考文獻(xiàn):
[1] 苑立波,童維軍,江山,等.我國(guó)光纖傳感技術(shù)發(fā)展路線圖 [J].光學(xué)學(xué)報(bào),2022,42(1):9-42.
[2] 韓超,胡賓鑫,朱峰,等.基于小波降噪的光纖布拉格光柵波長(zhǎng)高精度解調(diào)算法 [J].激光與光電子學(xué)進(jìn)展,2022,59(5):132-138.
[3] 李昊業(yè),張?chǎng)窝悦鳎?面向航天器微小碰撞的飛秒光纖光柵沖擊檢測(cè)系統(tǒng) [J].電子測(cè)量與儀器學(xué)報(bào),2022,36(2):153-159.
[4] 張鼎博,李俊,張維,等.光纖光柵傳感技術(shù)在異形結(jié)構(gòu)健康監(jiān)測(cè)中的應(yīng)用 [J].激光與光電子學(xué)進(jìn)展,2022,59(5):95-107.
[5] 姜濤.基于光纖應(yīng)變傳感技術(shù)的管道健康監(jiān)測(cè) [D].大連:大連理工大學(xué),2019.
[6] 呂安強(qiáng),魏倫.基于光纖傳感技術(shù)的風(fēng)機(jī)葉片故障檢測(cè)技術(shù)研究進(jìn)展 [J].高壓電器,2022,58(7):83-92.
[7] 周慧棟,王東,王宇,等.掃描激光器型光纖光柵解調(diào)儀設(shè)計(jì) [J].光學(xué)技術(shù),2019,45(2):153-158.
[8] 潘嵩,鞠振河,趙音.基于Cortex-M7的32位ARM高速ADC采集電路 [J].沈陽(yáng)工程學(xué)院學(xué)報(bào):自然科學(xué)版,2022,18(1):62-65+74.
[9] 陳煒煒,詹躍東.基于單片機(jī)的直流電機(jī)PWM調(diào)速系統(tǒng) [J].化工自動(dòng)化及儀表,2019,46(3):218-222.
[10] 張晨亮,蘇學(xué)軍,王成剛,等.基于AD9226的數(shù)據(jù)采集板設(shè)計(jì)與實(shí)現(xiàn) [J].實(shí)驗(yàn)技術(shù)與管理,2017,34(S1):63-65+69.
作者簡(jiǎn)介:孫智鵬(1995—),男,漢族,山東平度人,碩士研究生在讀,研究方向:光纖傳感技術(shù)、電機(jī)與控制。
