
基于觀測器的四旋翼無人機故障診斷方法
2023-07-04 03:31:46黃慶南祁靜茹戴喜生吳其琦
廣西科技大學學報 2023年2期
關鍵詞:故障診斷
黃慶南 祁靜茹 戴喜生 吳其琦

摘 要:針對具有非線性項和擾動的四旋翼無人機系統,提出一種基于中間觀測器的故障診斷算法,該算法不僅能估計系統的狀態,而且能同時對無人機的執行器故障、傳感器故障和擾動進行估計。首先,為便于處理傳感器故障和擾動,對原系統進行增廣;其次,引入一個中間變量,對增廣后的系統設計中間觀測器,利用該觀測器可以得到系統狀態、故障和擾動的估計,并采用Lyapunov函數證明了誤差系統一致最終有界;最后,通過四旋翼無人機系統的仿真,驗證了本文提出的方法可以很好地估計出故障和擾動。
關鍵詞:故障診斷;四旋翼無人機;執行器;傳感器;觀測器
中圖分類號:TP273;V249.1 DOI:10.16375/j.cnki.cn45-1395/t.2023.02.010
0 引言
四旋翼無人機(quadrotor unmanned aerial vehicle,QUAV)具有體積小、靈活性強、成本低、結構簡單等諸多優點,與其他無人機系統相比,其應用越來越廣泛。在軍事應用中,四旋翼無人機可以在地形受限的情況下執行探測、樣本采集、軍事監視以及搜索和摧毀等任務;在民用應用中,四旋翼無人機可用于圖像識別、環境監測、災后勘測和測繪、火山活動監測和大氣采樣等[1-4]。隨著對四旋翼無人機的深入研究,其執行的任務范圍大幅度增加,同時無人機系統性能不斷提高,使得控制系統變得更加復雜。因此,在頻繁執行任務的過程中,可能會發生各種故障,例如執行器和傳感器故障。QUAV系統故障的發生不僅容易損壞無人機本身,而且嚴重威脅人類和環境的安全,特別是在飛越市區時,QUAV的墜毀將造成巨大的人員傷亡和財產損失[5-8]。隨著對四旋翼無人機系統可靠性、可用性、安全性和穩定性的需求日益增長,無人機故障檢測與隔離和容錯控制的研究進展較快。為了實現較好的容錯控制效果,故障診斷算法應盡可能地提供故障的細節[9-10]。
針對四旋翼無人機執行器故障,研究人員提出了許多方法。例如,Freddi等[11]提出了一種基于Thau觀測器的非線性系統故障診斷方法,該方法可以使用觀測器生成殘差來檢測傳感器和執行器故障,但不適用于故障隔離和估計。Cen等[12]提出了一種新的自適應Thau觀測器,該觀測器優化了四旋翼無人機魯棒故障診斷方案,并在實際的四旋翼無人機系統上實現,與以往的四旋翼無人機故障診斷研究不同,這種基于自適應Thau觀測器的故障診斷方法不僅可以檢測執行器故障,而且可以根據實際飛行數據估計故障嚴重程度。Ren[13]研究了具有外部干擾的四旋翼無人機執行器的故障估計問題,首先將原系統轉化為增廣系統,然后設計了非線性魯棒[H∞]觀測器,達到了可以同時估計系統的狀態以及執行器故障的效果。Chen等[14]提出了一種用于姿態軌跡控制的滑模控制器,以及一種用于位置軌跡跟蹤控制的魯棒反步滑模控制器,此外,考慮了基于觀測器的故障估計方案,并給出了其適用的條件和約束條件。上述文獻并沒有涉及無人機系統的傳感器故障研究。
為了處理四旋翼無人機傳感器故障,相關人員對其進行了研究。Aboutalebi等[15]設計了一種基于非線性動力學模型的新方案,用于無人機系統中的傳感器故障檢測和隔離。在該方案中,神經網絡被用作無人機傳感器故障診斷的觀測器,神經網絡的加權參數由擴展卡爾曼濾波器更新,該方法能夠快速地檢測傳感器故障。Zuo等[16]研究了四旋翼無人機姿態控制系統的慣性測量單元傳感器故障診斷問題,考慮了模型的非線性項和外部干擾。為了獲得更準確的故障估計效果,設計了未知輸入觀測器來實現對傳感器故障的估計。針對四旋翼無人機的傳感器故障,Abouselima等[17]提出了一種新的基于模型的觀測器故障診斷方案,利用殘差發生器,提供虛擬殘差信號來進行傳感器的故障估計;引入了一種加性積分作用,從而提高其魯棒性;此外,在計算輔助輸出時,系統因為有積分作用,有助于避免由控制輸入和故障微分引起的問題。
在實際應用中,故障的出現并不總是單一的,而是執行器和傳感器有可能同時發生故障,對此,相關學者對其進行了研究并取得了一些成果。胡正高等[18]提出了一種基于自適應未知輸入觀測器的故障診斷方法,用以估計執行器故障和傳感器故障,克服了以往文獻中要求故障導數和系統干擾上界已知的不足,但未實現對外部擾動的估計。對于一類非線性的不確定Lipschitz系統,Defoort等[19]提出了一種將廣義觀測器和自適應滑模觀測器相結合的方法,采用自適應滑模方法估計系統狀態和傳感器故障,推導了自適應超扭轉觀測器來估計執行器故障。當觀測器匹配條件不滿足時,Yang等[20]首先對系統進行增廣,引入新的狀態向量,然后設計高增益滑模觀測器來逼近輔助輸出向量,最后使用自適應魯棒滑模觀測器來檢測執行器和傳感器故障,該方案不僅用于故障檢測,還用于故障隔離。對于非線性系統,Zhu等[21]首次提出了中間觀測器,突破了觀測器匹配條件的限制,不僅可以對單個的執行器故障進行估計,還可以處理執行器和傳感器同時發生故障的情況,實現故障的估計,但系統忽略了外部干擾的影響。
因此,在飛行過程中,當四旋翼無人機的執行器和傳感器同時發生故障時,四旋翼無人機常常還會伴隨外部擾動。針對這類問題,本文提出一種基于中間變量的故障估計算法。首先,將外部擾動和傳感器故障作為輔助狀態,對原系統進行增廣;其次,對增廣系統設計中間觀測器,根據所設計的觀測器,就可以估計出系統的狀態、故障和外部擾動;最后,通過系統仿真,驗證了本文提出算法的有效性。
1 四旋翼無人機模型
為了估計系統的狀態、故障和擾動,必須了解四旋翼無人機的動態特性。四旋翼無人機是一個欠驅動系統,有分別沿[x]軸、[y]軸和[z]軸做平移和旋轉的6個自由度,但只有4個實際輸入,能夠以高低速懸停和飛行,可以向任何方向移動,可以垂直起降,是一種結構簡單、容易進行控制的飛行系統。它有4個螺旋槳,分別由4個電機控制。通過改變這些螺旋槳的速度來實現四旋翼無人機的橫滾、俯仰和偏航運動。
根據相關學者對四旋翼無人機的研究,為便于建模,需要在不損失通用性的情況下做出以下假設:飛機是一個剛體,飛機的質量具有均勻分布;飛機升力面和重心在同一平面上。基于此假設,文獻[22]建立了如下所示的四旋翼無人機姿態系統的動力學模型:
[?=Jy-JzJxθψ+dKcJxUr-Ul-KxJx?2,θ=Jz-JxJyψ?+dKcJyUf-Ub-KyJyθ2,ψ=Jx-JyJzθ?+KucJzUf+Ub+KunJzUr+Ul-KzJzψ2.] (1)
其中:[Jx]、[Jy]、[Jz]分別表示繞橫滾軸、俯仰軸和偏航軸的轉動慣量;機體軸的歐拉角([Λ])為:[Λ=(?, θ, ψ)T],[?、θ、ψ]分別表示橫滾角、俯仰角和偏航角;[Ul]、[Ur]、[Uf]、[Ub]分別表示四旋翼無人機的左電機、右電機、前電機以及后電機的電壓值;[d]表示旋翼中心到四旋翼無人機重心的距離;[Kc]表示螺旋槳的升力力矩系數;[Kuc]、[Kun]表示無人機電機正轉和反轉的電壓力矩系數;[Kx]、[Ky]、[Kz]分別表示[x]、[y]、[z]軸上的氣動摩擦系數。
定義狀態向量[xt=[??θθψψ]T],輸出向量[yt=[??θθψψ]T]和控制輸入向量[ut=[VfVbVrVl]T],則具有非線性項的四旋翼無人機系統可以表示為如下狀態矩陣的形式:
[xt=Axt+But+gt, xt,yt=Cxt.] (2)
2 觀測器設計
對四旋翼無人機故障系統設計中間觀測器,從而實現對故障和擾動的估計。當執行器和傳感器同時發生故障時,考慮外部干擾的四旋翼無人機非線性系統狀態方程可表示如下:
[xt=Axt+But+gt, xt+Efat+Mdt,yt=Cxt+Dfst.]
(3)
其中:[xt∈Rn]是系統狀態;[ut∈Rm]是系統輸入;[yt∈Rl]是系統輸出;[A]、[B]、[C]、[D]、[E]和[M]是適當維數的實常數矩陣,且矩陣[D]、[E]和[M]都是列滿秩;假設[A, B]和[A, C]分別是可控和可觀的;[fat∈Rr]表示執行器故障;[fst∈Rq]是傳感器故障;[dt∈Rp]表示擾動;[t]表示時間的數值,單位 [s]。
假設1 執行器故障[fat]、傳感器故障[fst]和擾動[dt]是時變的且滿足[fat≤θ]且[θ≥0],[fst≤η]且[η≥0],[dt≤ν]且[ν≥0],這里的[θ]、[η]、[ν]為正常數。
假設2 非線性向量[gt, xt]滿足李普希茨條件,[gt, xt-gt, xt≤lxt-xt],[?]表示歐式范數。
為了便于處理傳感器故障,對原系統進行增廣,可以得到如下增廣系統:
[xat=Aaxat+gat, xat+Baut+Eaft+Maζt,yt=Caxat.] (4)
其中:
[xa=xtdtfst,Aa=AM0000000,Ba=B00,gat, xat=gt, xt00,Ea=E00,Ma=00I00I,][Ca=C0D,ζt=dtfst.]
假設3 對于任何具有非負實部的復數[λ],下面等式成立:
[rankAa-λIEaCa0=n+p+q+rankEa]. (5)
引理1[23] 對于任何向量[X,Y∈Rn],標量[ε>0]和正定矩陣[P],滿足:
[2XTPY≤1εXTPX+εYTPY]. (6)
為了處理執行器和傳感器同時發生故障的估計問題,針對增廣系統(4),設計中間觀測器。首先引入一個中間向量,形式如下:
[ξt=fat-σETaxat]. (7)
則:
[ξt=fat-σETaxat=fat-σETaAaxat+xa ? ? ? ? ?gat, xat+Baut+Eafat+Maζt. ? ?(8)]
為了估計四旋翼無人機系統的狀態、故障和擾動,觀測器設計如下:
[xat=Aaxat+gat, xat+Baut+Eafat+Fyt-yt,ξt=-σETaEaξt-σETaAaxat+gat, xat+ξBaut+σEaETaxat,yt=Caxat,dt=Cdxat,fat=ξt+σETaxat,fst=Csxat.] (9)
其中:[Cd=0I0,Cs=[00I]]。定義估計誤差[exat=xat-xat],[efat=fat-fat],[eξt=ξt-ξt],可以得到:
[exat=Aa-FCaexat+Ga+Eaefat+Maζt=Aa-FCaexat+Ga+Eaeξt+σEaETaexat+Maζt, ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?(10)]
[eξt=fat-σETaEaeξt-σETaAaexat+σEaETaexat+Ga+Maζt]. (11)
其中,[Ga=gat, xat-gat, xat]。
定理1 如果上述假設成立,對于給定的正常數[σ]、[ε],若存在標量[δ>0]和矩陣[P>0],[H],使得
[Π=Π11Π12lPaPaMalσδI0?Π22000σδETaMa??-εI000???-εI00????-εI0?????-εI<0]
(12)
成立,那么估計誤差系統(10)、(11)一致最終有界,估計器增益由[F=P-1H]給出。
其中:
[Π11=PaAa-HaCa+ATaPa-CTaHTa+σPaEaETa+σEaETaPa+εI,]
[Π12=ΠT21=PaEa-σ2δEaETaEa-σδATaEa,]
[Π22=εETaEa-2σδETaEa+1εI.]
證明 考慮如下李雅普諾夫函數:
[V=eTxatPexat+eTξtΓeξt]. (13)
其中,[Γ=δI],則:
[V=eTxatPexat+eTxatPexat+eTξtΓeξt+eTξtΓeξt=eTxatPAa-FCa+Aa-FCaTP?exat+2eTxatEaefat+2eTxatGa+2eTxatMaζt-2σδeTξtETaEaeξt-2σδeTξtETaAaexat-2σδeTξtETaAaGa-2σδeTξtETaMaζt-2σ2δeTξtETaEaETaexat+2σeTξtfat. ? ? ? ? ? ? ? ? ?(14)]
由假設1可知,存在標量[γ],使得:
[ζt≤γ]. (15)
根據引理1,以下不等式恒成立:
[2eTxatPGa≤εeTxatexat+1εl2eTxatP2exat], (16)
[2eTxatPMaζt≤1εeTxatPMaMTaPexat+εγ2], (17)
[2eTξtΓfat≤1εeTξteξt+εδ2η2], (18)
[-2σeTξtΓETaGa≤εeTξtETaEaeξt + 1εl2δ2σ2eTxatexat,]
(19)
[-2σeTξtΓETaMaζt≤1εσ2δ2eTξtETaMaMTaEaeξt+εγ2].
(20)
令[et=exateξt],則:
[V=eTtΩet+κ]. (21)
其中:
[Ω=Ω11Ω12*Ω22],[κ=2εγ2+εδ2η2],
[Ω11=PAa-FCa+Aa-FCaTP+σPEaETa+ ? ? ? ? ? ?σEaETaP+εI+1εl2P2+1εPMaMTaP+ ? ? ? ? ? ?1εl2δ2σ2I],
[Ω12=ΩT21=PEa-σ2δEaETaEa-σδATaEa,Ω22=1εI+1εσ2δ2ETaMaMTaEa+εETaEa-2σδETaEa.]
根據舒爾補定理可知,[Ω<0]成立就相當于式(12)成立。令[Δ=-Ω],[Ω<0],則[Δ>0]。根據式(21)可以得到:
[Vt≤λmaxΩet2+κ≤-λminΔet2+κ.]
[(22)]
由式(13)可以得到以下式子:
[Vt≥λminPexat2+δeξt2], (23)
[Vt≤λmaxPexat2+δeξt2≤maxλmaxP,δexat2+eξt2.]
(24)
因此,
[Vt≤-ωVt+κ]. (25)
其中:
[ω=λminΔmaxλmaxP,δ]. (26)
因為矩陣[E]是列滿秩,增廣后的矩陣[Ea]也是列滿秩,所以[ETaEa]是正定的,又因為[δ>0],[σ>0],所以存在[Ω22<0]。因此,當[Ω<0]時,有[Ω22<0]是可以做到的。
定義集合:
[R=exat,eξtλminPexat2+δeξt2≤κω].
(27)
記[R]的補集為[R],則:
[R=exat,eξtλminPexat2+δeξt2>κω].
(28)
當[exat,eξt]滿足集合[R]的補集[R]時,可得:
[Vt≥λminPexat2+δeξt2>κω]. (29)
則
[V<0, exat, eξt∈R]. (30)
根據李雅普諾夫穩定性理論,可以得出,估計誤差系統[exat]、[eξt]一致最終有界,并且按指數收斂到集合[R],收斂速率大于[e-ωt],證明結束。
3 仿真結果
根據文獻[22],四旋翼無人機系統的模型矩陣和非線性項[gt, xt]表示如下:
[A=010000000000000100000000000001000000,B=0000000.423 9-0.423 900000.423 9-0.423 9000000-0.032 7-0.032 70.032 70.032 7,]
[C=100000010000001000000100000010000001,]
[gt, xt=0-0.992 8x4tx6t-0.144 9x22t00.992 8x2tx6t-0.144 9x24t0-0.082 7x26t].
另外,選取執行器故障矩陣[E],傳感器故障矩陣[D]以及擾動矩陣[M],故障[fat]、[fst]和擾動信號[dt]如下:
[E=100101T,]
[D=011111T,]
[M=00.500.500T],
[fat=0, ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?0≤t<5,0.2+0.3sint, ? ? ? ? ?5≤t<30,0.02t, ? ? ? ? ? ? ? ? ? ? ? ? ?30≤t<40,0.1, ? ? ? ? ? ? ? ? ? ? ? ? ? ? 40≤t<50,0, ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?50≤t≤60.]
[fst=0, ? ? ? ? ? ? ? ? ? ?0≤t<5,0.2sin2t, ? ? 5≤t<30,0.3, ? ? ? ? ? ? ? ?30≤t<45,0, ? ? ? ? ? ? ? ? ? 45≤t≤60. ]
[dt=0, ? ? ? ? ? ? ? ? 0≤t<5,0.01t, ? ? ? ? 5≤t<30,0.2, ? ? ? ? ? ? 30≤t<40,0, ? ? ? ? ? ? ? ? 40≤t≤60.]
選取[σ=2.4],[ε=1],[l=0.1],狀態的初始條件選擇[x0=000000T],通過求解線性矩陣不等式(12)可以得到[P]、[H]和[δ]如下:
[P=495.214 781.055 4132.899 4-98.863 3132.899 4-320.556 6-0.151 4-0.519 181.055 4346.276 6-112.212 7-5.218 9-112.212 7-95.590 8-14.467 68.809 8132.899 4-112.212 7321.115 1-55.071 9-79.358 3-98.282 05.246 99.008 4-98.863 3-5.218 9-55.071 9295.787 8-55.071 9-154.553 9-11.382 26.329 9132.899 4-112.212 7-79.358 3-55.071 9321.115 1-98.282 05.246 99.008 4-320.556 6-95.590 8-98.282 0-154.553 9-98.282 0505.141 711.562 84.601 5-0.151 4-14.467 65.246 9-11.382 25.246 911.562 82.862 6-0.115 8-0.519 18.809 89.008 46.329 99.008 44.601 5-0.115 838.244 2],
[H=1034.585 30.386 80.422 30.181 20.422 6-1.317 90.393 82.787 6-0.444 6-0.339 5-0.445 8-1.104 30.429 3-0.476 12.548 0-0.437 4-0.277 5-0.865 00.187 3-0.341 1-0.412 72.573 1-0.612 2-0.696 60.429 1-0.474 9-0.278 7-0.638 42.548 0-0.665 7-1.313 2-1.125 4-0.855 1-0.712 9-0.654 03.831 0-0.037 60.046 5-0.040 20.046 3-0.040 2-0.008 3-0.006 20.508 30.471 60.502 40.473 20.483 3],[δ=0.541 5].
根據[L=P-1H],可得觀測器增益矩陣[L]如下:
[L=36.194 2-5.932 3-1.407 110.590 8-1.517 11.435 5167.832 634.897 573.602 2-2.755 868.687 8-168.059 1171.739 124.961 583.731 1-4.885 271.771 3-169.180 2181.385 318.627 865.549 115.423 360.347 5-150.841 3171.738 624.964 676.672 7-5.387 078.826 7-168.682 5170.673 613.367 561.468 36.034 157.591 8-129.853 4232.430 8120.424 273.781 059.136 862.080 1-301.263 3-169.091 4-10.916 0-60.448 113.234 5-55.674 3170.631 9].
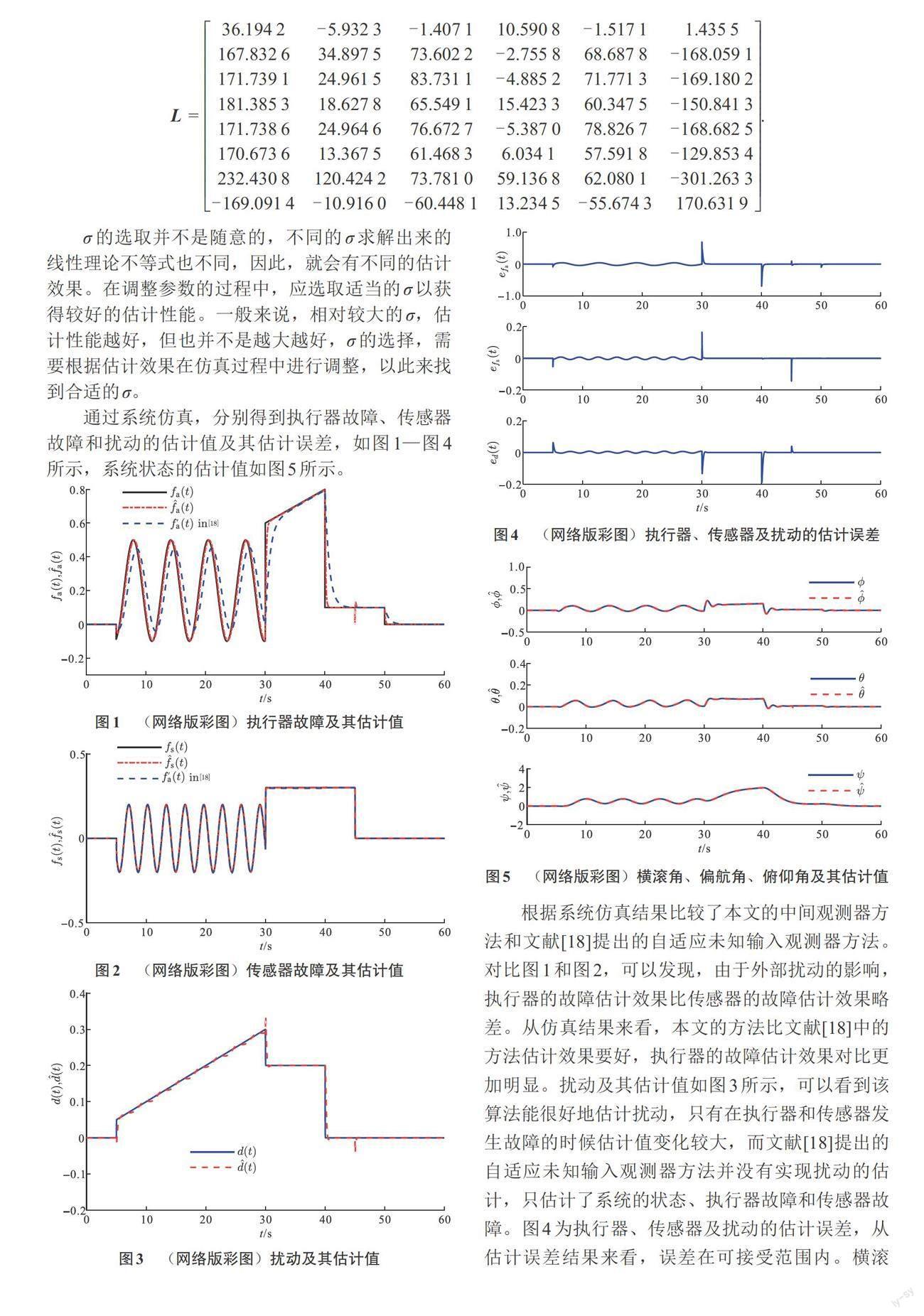
[σ]的選取并不是隨意的,不同的[σ]求解出來的線性理論不等式也不同,因此,就會有不同的估計效果。在調整參數的過程中,應選取適當的[σ]以獲得較好的估計性能。一般來說,相對較大的[σ],估計性能越好,但也并不是越大越好,[σ]的選擇,需要根據估計效果在仿真過程中進行調整,以此來找到合適的[σ]。
通過系統仿真,分別得到執行器故障、傳感器故障和擾動的估計值及其估計誤差,如圖1—圖4所示,系統狀態的估計值如圖5所示。
根據系統仿真結果比較了本文的中間觀測器方法和文獻[18]提出的自適應未知輸入觀測器方法。對比圖1和圖2,可以發現,由于外部擾動的影響,執行器的故障估計效果比傳感器的故障估計效果略差。從仿真結果來看,本文的方法比文獻[18]中的方法估計效果要好,執行器的故障估計效果對比更加明顯。擾動及其估計值如圖3所示,可以看到該算法能很好地估計擾動,只有在執行器和傳感器發生故障的時候估計值變化較大,而文獻[18]提出的自適應未知輸入觀測器方法并沒有實現擾動的估計,只估計了系統的狀態、執行器故障和傳感器故障。圖4為執行器、傳感器及擾動的估計誤差,從估計誤差結果來看,誤差在可接受范圍內。橫滾角、偏航角、俯仰角及其估計值如圖5所示,從圖5中可以看出,本文的方法能夠實現很好的狀態估計效果,可獲得滿意的估計性能。
4 結論
本文研究了具有非線性項和外部干擾的四旋翼無人機執行器和傳感器的故障估計問題,提出了一種可以同時估計系統狀態、執行器故障、傳感器故障和擾動的方法。首先將傳感器故障和外部擾動作為一個新的狀態向量,對原系統進行增廣操作,然后對增廣系統設計中間觀測器,用來估計系統的狀態、故障及擾動;采用Lyapunov函數證明了誤差系統一致最終有界;最后通過四旋翼無人機系統的仿真,表明該方法能夠有效地同時估計出系統的狀態、故障以及外部擾動。對控制系統來說,故障診斷十分重要,在此基礎上,還應該設計適當的容錯控制策略,以補償故障并保持系統的穩定性。因此,未來的工作在于根據故障估計的結果設計容錯控制器,對四旋翼無人機進行容錯控制研究。
參考文獻
[1] 全權.多旋翼飛行器設計與控制[M].北京:電子工業出版社,2018.
[2] JU C Y,SON H I.Multiple UAV systems for agricultural applications:control,implementation,and evaluation[J].Electronics,2018,7(9):162.
[3] SHAO X L,LIU J,CAO H L,et al.Robust dynamic surface trajectory tracking control for a quadrotor UAV via extended state observer[J].International Journal of Robust and Nonlinear Control,2018,28(7):2700-2719.
[4] 陳鍇,羅文廣.用于橋梁病害檢測的無人機地面站設計及實現[J].廣西科技大學學報,2021,32(4):35-42.
[5] 劉貞報,馬博迪,高紅崗,等.基于形態自適應網絡的無人機目標跟蹤方法[J].航空學報,2021,42(4):487-500.
[6] 劉金富,黃頔,王文林.無人機故障診斷研究進展[J].控制工程,2022,29(3):428-434.
[7] 戴喜生,張建香,袁海英,等.基于閉環P型學習控制的線性分布參數切換系統故障診斷[J].廣西科技大學學報,2016,27(4):7-14.
[8] 唐博文,王智文,胡振寰.基于事件驅動的無人機強化學習避障研究[J].廣西科技大學學報,2019,30(1):96-102,117.
[9] 姜斌,張柯,楊浩,等.衛星姿態控制系統容錯控制綜述[J].航空學報,2021,42(11):66-79.
[10] 周東華,胡艷艷.動態系統的故障診斷技術[J].自動化學報,2009,35(6):748-758.
[11] FREDDI A,LONGHI S,MONTERIU A.A diagnostic Thau observer for a class of unmanned vehicles[J].Journal of Intelligent and Robotic Systems,2012,67(1):61-73.
[12] CEN Z H,NOURA H,SUSILO T B,et al.Robust fault diagnosis for quadrotor UAVs using adaptive Thau observer[J].Journal of Intelligent and Robotic Systems,2014,73(1):573-588.
[13] REN X L.Observer design for actuator failure of a quadrotor[J].IEEE Access,2020,8:152742-152750.
[14] CHEN F Y,JIANG R Q,ZHANG K K,et al.Robust backstepping sliding-mode control and observer-based fault estimation for a quadrotor UAV[J].IEEE Transactions on Industrial Electronics,2016,63(8):5044-5056.
[15] ABOUTALEBI P,ABBASPOUR A,FOROUZA-NNEZHAD P,et al.A novel sensor fault detection in an unmanned quadrotor based on adaptive neural observer[J].Journal of Intelligent and Robotic Systems,2018,90(3-4):473-484.
[16] ZUO L F,YAO L,KANG Y F.UIO based sensor fault diagnosis and compensation for quadrotor UAV[C]//2020 Chinese Control and Decision Conference(CCDC),Shenyang,China,2020:4052-4057.
[17] ABOUSELIMA E,ICHALAL D,MAMMAR S.Robust sensor fault estimation for LPV systems:application to quadrotor UAV[C]//2021 9th International Conference on Systems and Control(ICSC),Caen,France,2021:373-379.
[18] 胡正高,趙國榮,李飛,等.基于自適應未知輸入觀測器的非線性動態系統故障診斷[J].控制與決策,2016,31(5):901-906.
[19] DEFOORT M,VELUVOLU K C,RATH J J,et al.Adaptive sensor and actuator fault estimation for a class of uncertain lipschitz nonlinear systems[J].International Journal of Adaptive Control and Signal Processing,2016,30(2):271-283.
[20] YANG J Q,ZHU F L.FDI design for uncertain nonlinear systems with both actuator and sensor faults[J].Asian Journal of Control,2015,17(1):213-224.
[21] ZHU J W,YANG G H,WANG H,et al.Fault estimation for a class of nonlinear systems based on intermediate estimator[J].IEEE Transactions on Automatic Control,2016,61(9):2518-2524.
[22] 楊薈憭,姜斌,張柯.四旋翼直升機姿態系統的直接自修復控制[J].控制理論與應用,2014,31(8):1053-1060.
[23] HA Q P,TRINH H.State and input simultaneous estimation for a class of nonlinear systems[J].Automatica,2004,40(10):1779-1785.
Fault diagnosis method for QUAV based on observer
HUANG Qingnan, QI Jingru, DAI Xisheng, WU Qiqi
(School of Automation, Guangxi University of Science and Technology, Liuzhou 545616, China)
Abstract: Aimied at the quadrotor unmanned aerial vehicle (QUAV) system with nonlinear terms and disturbance, this paper proposes an intermediate observer-based fault diagnosis algorithm, which can estimate not only the state of the system, but also the UAV's actuator faults, sensor faults and disturbance at the same time. Firstly, the original system is augmented in order to facilitate the handling of sensor fault and disturbance. Secondly, an intermediate variable is introduced, and an intermediate observer is designed for the augmented system, and the system state, fault and disturbance can be estimated by using this observer, the error system is proved to be uniformly eventually bounded using Lyapunov function. Finally, the simulation of the QUAV system verifies that the method proposed in this paper can estimate the faults and disturbance well.
Key words: fault diagnosis; quadrotor unmanned aerial vehicle (QUAV); actuator; sensor; observer
(責任編輯:黎 婭)
猜你喜歡
一重技術(2021年5期)2022-01-18 05:42:10
水泵技術(2021年3期)2021-08-14 02:09:20
裝備制造技術(2020年3期)2020-12-25 05:22:30
制造技術與機床(2018年11期)2018-11-23 01:07:42
電子制作(2018年10期)2018-08-04 03:24:46
制造技術與機床(2017年10期)2017-11-28 05:20:43
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
振動工程學報(2014年2期)2014-03-01 01:15:22
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
振動、測試與診斷(2014年4期)2014-03-01 01:14:00
