運載火箭電磁閥判讀算法設計
2023-07-06 12:42:20趙新航蘭旭東湯小雙
計算機測量與控制 2023年6期
關鍵詞:實驗
趙新航,韓 飛,蘭旭東,謝 望,湯小雙,徐 昕
(上海航天電子技術研究所,上海 201109)
0 引言
隨著我國航天事業的逐漸繁榮,我國在運載火箭領域取得了飛速突破,運載火箭的型號類型也越來越豐富。作為在運載火箭領域的一項重要應用,電磁閥在發射任務中起著重要作用,保證著控制、動力等系統的正常運行[1-2]。另外,電磁閥的可靠性和性能直接影響到地面測試發射系統[3],因此對電磁閥的測試以及數據分析就尤為重要。電磁閥判讀技術能夠評估電磁閥在火箭起飛前后電磁閥的工作狀態,為運載火箭的順利飛行保駕護航。
近年來,許多型號都迎來了首飛任務,現役型號的年發射任務量相比以前密度更高,時間更緊,在電磁閥采集判讀方面,伴隨著的則是更廣闊的應用以及一些新型電磁閥的出現,這就對電磁閥的數據判讀提出了更高的要求。出現的新型電磁閥如發生器點火器和推力室點火器主要應用于發動機中,用來控制發動機的啟動。它們的特性與傳統電磁閥特性不同,傳統電磁閥判讀算法不符合新型電磁閥特性,因此對電磁閥信號判讀提出了新的需求,就此針對新型電磁閥提出新的判讀算法并進行實驗分析。
本文針對傳統電磁閥和新型電磁閥的信號判讀與波形顯示進行實驗和分析,對系統的原理、組成、功能等進行介紹。根據電磁閥種類的不同對電磁閥進行分類,詳細介紹軟件的算法和功能,并基于實驗進行數據分析,對算法的可行性進行驗證。本文對已有的傳統電磁閥判讀算法進行鞏固和維護,并在傳統判讀算法的基礎上針對新型電磁閥的特性對判讀算法進行修改與更新,從而適應新的需求。實驗結果表明,本文提出的算法適用于運載火箭領域常見的傳統電磁閥以及出現的新型電磁閥。
1 系統結構及原理
1.1 系統組成
系統包括硬件、軟件兩部分。硬件設備為電磁閥采集設備,用來采集電磁閥工作時輸出的電流信號。軟件為電磁閥自動判讀軟件,該軟件根據換算公式將16位二進制數據轉換為電壓值,并對硬件設備采集到的電磁閥波形進行分析處理。
1.2 系統功能
電磁閥采集設備內置2塊板卡,各24路通道,用來接收電磁閥工作時傳輸的電流信號,經過隔離模塊后,將接收到的模擬信號轉換為數字信號,傳輸到電磁閥信號測試計算機內進行采集,并將該信號存儲為數據文件[3-4]。
電磁閥采集設備采集數據并存儲至計算機本地硬盤,電磁閥自動判讀軟件讀取設備存儲的數據文件,對數據進行判讀,繪制曲線,并提取特征參數。
1.3 傳統電磁閥
傳統電磁閥信號通、斷電時瞬態時間曲線及特征值如圖1所示。

圖1 傳統電磁閥電流波形
圖1為傳統電磁閥通斷瞬態電流時間曲線圖,根據電磁閥種類的不同,電磁閥開啟和關閉時間有所不同,但傳統電磁閥的電流時間曲線是大致相同的。
在波形圖中,可以取到幾個特征參數對電磁閥特性進行分析。其中,I為穩態電流,I1為啟動電流,I2為釋放電流,t1為打開時間,t2為關閉時間,I1/I為開啟電流比,I2/I為關閉電流比,△I1、△I2為峰-峰差值[3]。對電磁閥特征參數進行分析,可以對電磁閥性能有一個定量的判斷。
1.4 新型電磁閥
與傳統電磁閥不同,運載火箭領域新出現的發生器點火器和推力室點火器等新型電磁閥不具有類似傳統電磁閥的電流波形。因此對于新型電磁閥,在實驗中需要提取一些其它的特征參數,來反映新型電磁閥電流的特征。針對運載火箭領域出現的新型電磁閥,本文通過實驗驗證來不斷優化算法,并實現對新型電磁閥的波形顯示和數據處理。
2 系統硬件設計
2.1 系統概述
硬件系統以PC104Plus接口卡形式實現對單板24路模擬信號的實時檢測[5-6]。兩塊板卡同時工作,即48路模擬信號同時采集,并將采集的信號存儲到硬盤上。在采集信號的同時,按照設定的閾值對每路信號進行跳變狀態檢測,當輸入信號超過門限值時顯示上跳信息,當信號由高到低下降到低于門限值時顯示下跳信息。
兩塊板卡均可實現模擬信號輸入和信號采集功能、信號跳變門限值的自定義功能以及模擬信號跳變檢測功能。板卡的采樣頻率設為N,計時精度為1/N。
2.2 系統硬件結構
采用基于DSP的信號處理模式,DSP 編程靈活、調試方便,可以根據信號的特點隨時進行修改,并支持代碼的在線加載[7]。本系統中把信號采集模塊和信號處理模塊集成在DSP內部統一實現,以便于根據實際調試情況進行后續的處理算法。
考慮到板卡面積的限制,前端采用信號隔離模塊,以防止信號通道之間的互擾以及前后端的信號隔離。
為實現24路信號采集和處理,本系統采用DSP作為系統的主處理模塊。根據處理能力以及外部接口的需求,采用TI公司的TMS320VC5416DSP,該DSP 最高工作頻率為160 MHz,設計采用DSP 的McBSP 接口實現信號的采集,該接口支持數據緩沖,并可以使用DSP 內部的DMA進行數據搬移,有利于對24路模擬信號的實時采集[8-9]。
系統硬件結構如圖2所示。

圖2 硬件系統結構框圖
考慮到實現的方便性和穩定性,在PCI協議實現中采用Plx9030橋芯片,但是該芯片不支持C5416的HPI接口,所以采用CPLD 進行接口轉換,即可實現DSP 和Plx9030的數據通信,且Plx9030的數據傳輸能力完全滿足本項目的要求[10]。
3 系統軟件設計
3.1 傳統電磁閥原理
如圖1所示,傳統電磁閥工作一般分為電磁閥開啟、電磁閥穩態和電磁閥關閉三個部分。針對不同電磁閥,電磁閥開啟時間和關閉時間一般在幾毫秒到幾十毫秒不等。電磁閥穩態電流時間曲線在理論上是水平直線,但實際上由于電磁閥內部存在電阻,所以是有斜率的斜線。因此,穩態時間較長的電磁閥在關閉前和開啟后的電流值會有一些差距。在判斷電磁閥工作狀態時,電磁閥穩態工作的情況可以不做判斷,所以通過軟件處理數據并繪制波形時,主要考慮電磁閥開啟和關閉部分。
基于以上原因,針對穩態時間較長的傳統電磁閥,在數據處理方面采用數據截取的方式[11],舍棄較長的穩態部分,只截取包含開啟時間和關閉時間內特征參數的部分,以便于更清楚地顯示波形和提取特征值[12-13]。而針對穩態時間較短的傳統電磁閥,則不對穩態部分進行截取。
3.2 軟件設計思路
運載火箭領域中,電磁閥主要分為發動機電磁閥和輔助動力電磁閥兩種類型。新型電磁閥屬于發動機電磁閥。
3.2.1 傳統電磁閥
傳統電磁閥包含了所有輔助動力電磁閥和大部分發動機電磁閥,針對這兩種電磁閥采用了類似的兩種算法。
3.2.1.1 發動機電磁閥
本節將先介紹發動機電磁閥中的傳統電磁閥算法。
一般地,傳統電磁閥波形顯示采用截取拼接的算法。截取指截掉較長的不做判斷的穩態部分,并分別取出上升沿和下降沿包含的所有采樣點。拼接則將取出的上升沿和下降沿拼到一起,組成一個完整的電磁閥開啟和關閉波形。
截取分為上升沿取點和下降沿取點兩部分。上升沿取點針對電磁閥開啟過程的部分,根據電磁閥采集設備設定的采樣頻率N,在電磁閥開啟之前開始取連續的采樣點,一直到電磁閥達到穩態之后結束。下降沿取點則針對電磁閥關閉過程的部分,從電磁閥穩態結束之前開始取連續的采樣點,一直到電磁閥關閉之后結束。這樣就得到了由連續采樣點組成的一段上升沿波形和一段下降沿波形。
發動機電磁閥的特點為每次實驗采集時只通斷一次,所以只有一個波形。圖3展示了上升沿取點的流程。在進行參數初始化時,得到待處理數據的總長度為length,設定索引值index、差值d1。從整段數據的第一個點開始采樣,每隔index個點取一段數據作為當前數據段,直到當前數據段的尾端數據和頭端數據差大于等于d1,表示該段電流正在逐漸增大,即該電磁閥準備進入工作狀態,取出該數據段作為上升沿。index和d1的值均需要在實驗驗證中不斷進行優化,以截取出理想的上升沿波形,并避免因噪聲干擾取出錯誤的數據段。

圖3 發動機電磁閥上升沿取點
下降沿取點與上升沿取點類似,不同點在于判斷的是數據段的尾端數據和頭端數據差小于等于d2(此處d2為一個負值),即該段電流正在逐漸減小,表示該電磁閥已結束穩態工作,準備關閉,最后取出符合要求的數據段作為下降沿。d2的值需要在實驗驗證中不斷進行優化,以截取出理想的下降沿波形,并避免因干擾而取出錯誤的數據段。
接著進行拼接的操作,將截取得到的上升沿和下降沿波形拼到一起,得到一個完整的電磁閥開啟和關閉波形。為了便于更好地觀察輸出波形和判讀分析數據,一般會在上升沿的前后和下降沿的前后均多截取一段數據,多截取部分的長度根據不同電磁閥的特性決定,并通過實驗驗證不斷進行優化[14-15]。
圖4展示了下降沿取點的流程。
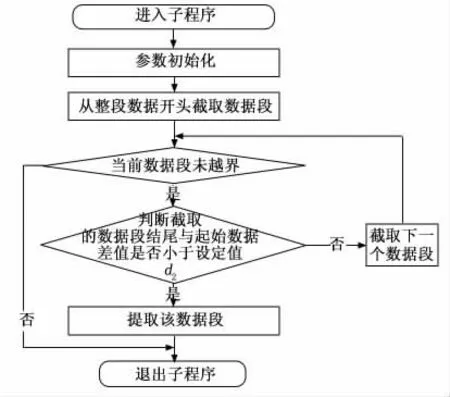
圖4 發動機電磁閥下降沿取點
完成截取拼接后,在電磁閥波形中取出特征點,根據特征點計算出所需要的特征參數的值,對電磁閥的特性進行分析,特征點包含上升初始點、上升吸合點、穩態點、下降初始點、下降釋放點。
參考圖1,上升初始點指電磁閥波形開始上升之前的零穩態點,即t1之前的點,上升初始點標志著波形即將進入上升沿。電磁閥在開啟過程中有一個小跳變,上升吸合點就是電磁閥開啟過程中跳變至最低點的點,即t1之后的點。穩態點是電磁閥開啟之后電流逐漸趨于平穩后的點,即位于I處的點,穩態點標志著波形的上升沿結束,進入了可以提供穩定電流的狀態。下降初始點指電磁閥波形開始下降之前的穩態點,即t2之前的點,下降初始點標志著電磁閥結束穩態工作,即將開始關閉。電磁閥在關閉過程中也存在一個小跳變,下降釋放點是在該過程中跳變至最高點的點,即t2之后的點。
根據找到的特征點的時間、電壓值等可以得到1.3節中提到的特征參數的值,并依此對電磁閥特性進行判讀[16-18]。
3.2.1.2 輔助動力電磁閥
與發動機電磁閥類似,輔助動力電磁閥也采用截取拼接的算法,不同點在于輔助動力電磁閥每次實驗采集時通斷次數不定,可能生成多個波形。
基于以上原因,在繪制波形時考慮生成不同數量波形的情況,以提高對不同閥門采樣的針對性,從而適應每個閥門的特性。圖5展示了輔助動力電磁閥截取拼接波形的算法。

圖5 輔助動力電磁閥波形繪制流程圖
由于生成波形數不同且電磁閥特性有所區別,為了保證完整取到每個波形的上升沿和下降沿的所有采樣點,在提取采樣點時對不同波形的情況做針對性處理,比如截取不同的采樣點數,以避免因普遍性不足而造成的波形拼接錯誤,從而影響特征參數的提取和數據的判讀[19]。具體的截取拼接算法與發動機電磁閥基本一致。
3.2.2 新型電磁閥
運載火箭領域新出現的發生器點火器和推力室點火器等新型電磁閥均屬于發動機電磁閥,它們不具有類似傳統電磁閥的電流波形,而是一種在不斷振蕩的波形。新型電磁閥的開啟時間相對較短,且需要對閥門在短時間內的振蕩次數進行判讀,所以在生成波形的過程中選擇繪制全程波形,而不是像傳統電磁閥一樣采用截取拼接的方法。圖6為新型電磁閥波形繪制的流程圖。
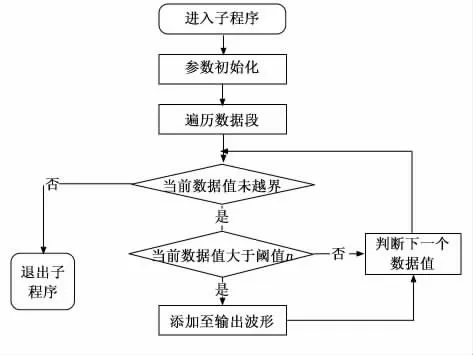
圖6 新型電磁閥波形繪制流程圖
繪制新型電磁閥波形時,設定一個閾值n,用該閾值n來判定電磁閥的開啟與關閉,n值通過多次試驗得到,在不影響實驗結果的情況下盡量取波形振蕩中的最低值。出現第一個大于n的數據值視為電磁閥已開啟,最后一個大于n的數據值結束視為電磁閥已關閉。遍歷數據段,將所有大于n的數據提取出來,并適當提取該段數據前后的一段數據,以便于更好地觀察輸出波形并判斷電磁閥可能出現的異常情況。n值需要通過實驗驗證不斷進行優化,以截取出理想的波形,避免數據冗余與丟失。
4 實驗結果與分析
4.1 實驗步驟和方法
在實驗室環境下,將電磁閥采集設備中的2塊板卡各24路通道通過電纜連接至電磁閥,每路電磁閥都可以產生對應的電壓曲線。網口通過網線與上位機連接,建立網絡連接后,電磁閥采集設備開始接收來自電磁閥的電流信號,并將接收到的數據進行本地存儲。電磁閥自動判讀軟件根據換算公式將16位二進制數據轉換為電壓值,完成波形繪制和顯示后,對其進行特征值處理和分析[20]。
為了不失真地采集模擬信號,根據香農采樣定理,采樣頻率大于等于模擬信號頻譜中最高頻率的2倍[21]。
其中:N為板卡的采樣頻率,fmax為被測信號的最高頻率。將N設定為8kHz,計時精度為0.125ms。
4.2 實驗分析
針對傳統電磁閥中的發動機電磁閥、輔助動力電磁閥,以及新型電磁閥分別進行實驗驗證,驗證情況如下。
4.2.1 發動機電磁閥
在發動機電磁閥中,對甲烷泄出閥、氧泄出閥、甲烷副控閥和氧起動閥進行實驗并對實驗數據和試驗結果進行分析。
圖7為實驗中電磁閥自動判讀軟件顯示的甲烷泄出閥的波形。
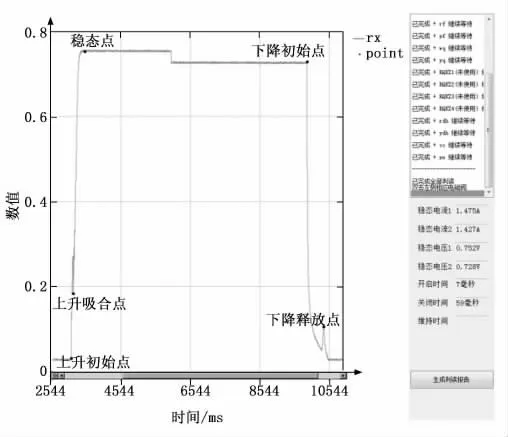
圖7 甲烷泄出閥波形
其中,橫坐標為采樣點數,根據采樣頻率為8kHz,可以得知8 000個采樣點代表1s。縱坐標為換算后的電壓值。實驗中甲烷泄出閥共開啟了大約14s,由于穩態時間較長,分別對該波形上升沿和下降沿包含的所有采樣點進行截取拼接,因此波形的中間穩態部分出現了斷層。前半段為截取的波形的上升沿,后半段為截取的波形的下降沿。

表1 發動機電磁閥測試數據判讀表
圖8為實驗中電磁閥自動判讀軟件繪制的氧泄出閥的波形。
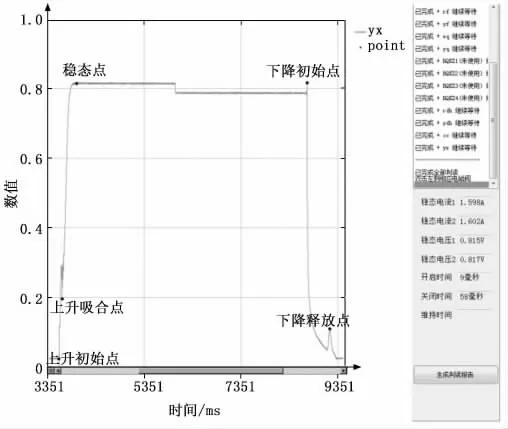
圖8 氧泄出閥波形
其中,橫坐標為采樣點,縱坐標為換算后的電壓值。實驗中氧泄出閥共開啟了大約13s,與甲烷泄出閥波形類似,由于閥門開啟后穩態時間較長,判讀時對波形圖進行了截取拼接,因此穩態部分在顯示時也出現了斷層。
圖9為實驗中電磁閥自動判讀軟件顯示的甲烷副控閥的波形。

圖9 甲烷副控閥波形
其中,橫坐標為采樣點,縱坐標為換算后的電壓值。實驗中甲烷副控閥共開啟了大約15s,閥門開啟后穩態時間較長,波形圖中前半部分為判讀得到的波形的上升沿,后半部分為判讀得到的波形的下降沿,判讀時對波形的上升沿和下降沿進行了截取拼接,因此穩態部分在顯示時也出現了斷層。
圖10為實驗中電磁閥自動判讀軟件繪制的氧起動閥的波形。

圖10 氧起動閥波形
其中,橫坐標為采樣點,縱坐標為換算后的電壓值。實驗中氧起動閥共開啟了大約13s,與前三種發動機電磁閥類似,閥門開啟后穩態時間較長,因此對波形圖的上升沿和下降沿進行了截取拼接的操作,在波形顯示時穩態部分也出現了斷層。
繪制波形結束后,軟件自動讀取上升初始點、上升吸合點、穩態點、下降初始點、下降釋放點等特征點,并根據這些特征點的橫坐標采樣點數和縱坐標電壓來計算穩態電流、開啟時間、關閉時間等特征參數,從而得知該電磁閥的特性。
測試結束后根據圖7~10的統計信息對發動機電磁閥波形和對應的特征參數進行判讀,判讀結果如表1所示。
甲烷泄出閥、氧泄出閥、甲烷副控閥和氧起動閥的開啟時間和關閉時間的要求值均為小于等于150ms,由表1可得,這些閥門的開啟時間和關閉時間的實測值均滿足要求。在圖7~10中,穩態電流1為在電流在上升沿之后的穩態值,穩態電流2為電流在下降沿之前的穩態值。甲烷泄出閥、氧泄出閥、甲烷副控閥和氧起動閥的采樣電阻值均為0.51Ω,以氧泄出閥和甲烷副控閥為例,氧泄出閥的實驗中,穩態電流1 的值為1.598 A,穩態電壓1 值的為0.815V,可以反映出采樣電阻值的大小,在誤差范圍內符合實際情況;在甲烷副控閥的實驗中,穩態電流2的值為1.618A,穩態電壓2值的為0.825V,同樣反映出了采樣電阻值的大小,在誤差范圍內符合實際情況。
4.2.2 輔助動力電磁閥
在輔助動力電磁閥中,以輔助動力1號閥、輔助動力3號閥為例對實驗情況進行分析。
圖11為電磁閥自動判讀軟件顯示的兩個電磁閥從第一次開啟到第三次結束的全程波形。
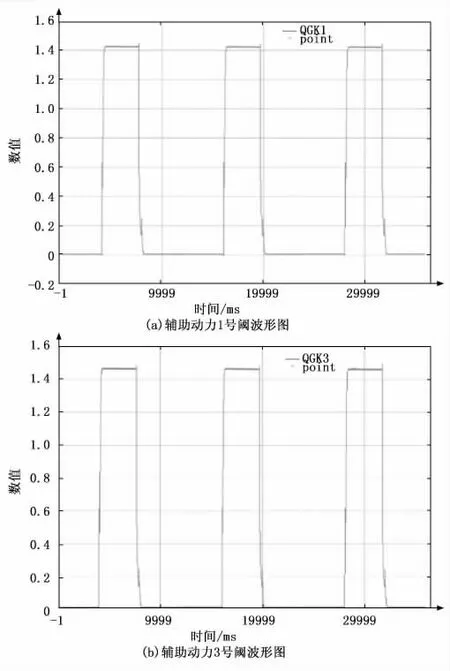
圖11 輔助動力電磁閥全程波形
實驗中輔助動力1、3號閥均開啟了三次,因此均有三個上升沿和下降沿。圖11(a)為輔助動力1號閥波形圖,圖11(b)為輔助動力3號閥波形圖。
圖12為選取的輔助動力1號閥第一次開啟的波形。

圖12 輔助動力1號閥第一次開啟波形
橫坐標為采樣點,縱坐標為換算后的電壓值。與甲烷泄出閥和氧泄出閥的波形相比,輔助動力1號閥的波形沒有出現斷層,也就是沒有對該波形進行截取拼接的操作,因為實驗中輔助動力1號閥僅開啟了約460ms,穩態時間較短,判讀時直接顯示了全程波形。
圖13為選取的輔助動力3號閥第一次開啟的波形。

圖13 輔助動力3號閥第一次開啟波形
橫坐標為采樣點,縱坐標為換算后的電壓值。實驗中輔助動力3號閥開啟了約460ms,與輔助動力1號閥相同,穩態時間較短,因此也沒有對該波形進行截取拼接的操作,而是繪制從電磁閥開啟到關閉的全程波形。
為了更精確地判讀輔助動力電磁閥的特征參數,需要精確選取一次特定波形后進行判讀,而不能在類似圖11的全程波形中進行判讀。
同發動機電磁閥一致,繪制波形結束后,軟件自動讀取上升初始點、上升吸合點、穩態點、下降初始點、下降釋放點等特征點,并根據這些特征點的橫坐標采樣點數和縱坐標電壓來計算穩態電流、開啟電流、開啟時間等特征參數,從而得知該電磁閥的特性。
測試結束后根據圖12和圖13的統計信息對輔助動力電磁閥波形和對應的特征參數進行判讀,判讀結果如表2所示。
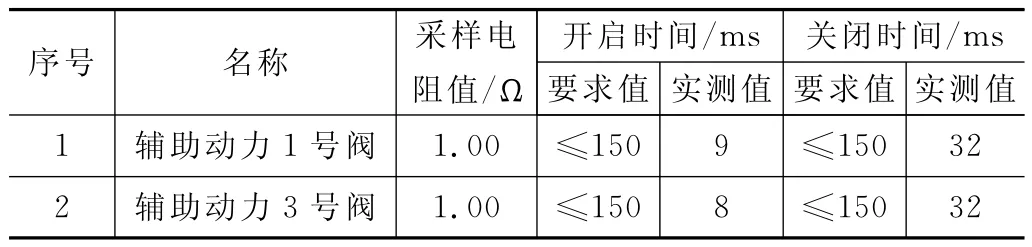
表2 輔助動力電磁閥測試數據判讀表
輔助動力1號閥和3號閥的開啟時間和關閉時間要求值均為小于等于150ms,由表2可得,開啟時間和關閉時間的實測值均滿足要求。與發動機電磁閥相同,圖12和圖13中的穩態電流1為在上升沿之后的穩態值,穩態電流2為在下降沿之前的穩態值。兩個電磁閥的采樣電阻值均為1.00Ω,以輔助動力1號閥為例,實驗中穩態電流1的值為1.427A,根據波形圖可知對應的穩態電壓值約為1.43V,可以反映出采樣電阻值的大小,在誤差范圍內符合實際情況。
4.2.3 新型電磁閥
在新型電磁閥中,以發生器點火器和推力室點火器為例對實驗情況進行分析。
圖14為實驗中電磁閥自動判讀軟件顯示的發生器點火器的波形。
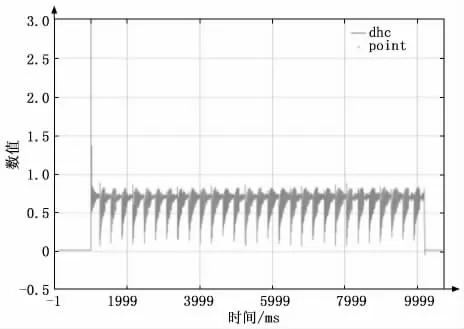
圖14 發生器點火器波形
橫坐標為采樣點,縱坐標為換算后的電壓值。如圖14所示,在發生器點火器打開的瞬間會產生一個值很大的電壓,為瞬時的擊穿電壓。
實驗中發生器點火器開啟了約1.15s。電磁閥自動判讀軟件繪制了發生器點火器的全程波形,振蕩次數為29次。
圖15為實驗中電磁閥自動判讀軟件顯示的推力室點火器的波形。
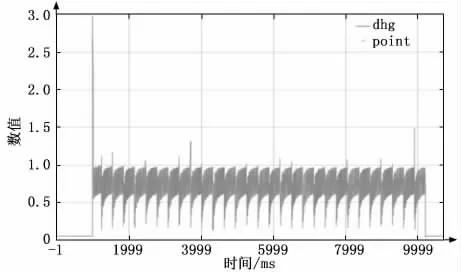
圖15 推力室點火器波形
橫坐標為采樣點,縱坐標為換算后的電壓值。實驗中推力室點火器開啟了1.15s。電磁閥自動判讀軟件繪制了推力室點火器的全程波形,振蕩次數為29次。
測試結束后根據圖14和圖15的統計信息對發生器點火器和推力室點火器波形和對應的特征參數進行判讀,判讀結果如表3所示。

表3 新型電磁閥測試數據判讀表
發生器點火器和推力室點火器的開啟時長均為115ms,在該開啟時長的范圍內,波形震蕩次數要求值為29 次左右,允許誤差為±3次。由表3可得,振蕩次數實測值在誤差范圍內滿足要求。
4.3 實驗結論
在實驗室環境下,對發動機電磁閥、輔助動力電磁閥、新型電磁閥均進行了實驗。在發動機電磁閥的實驗中,以甲烷泄出閥、氧泄出閥、甲烷副控閥和氧起動閥為例,對其實驗數據進行分析。以上幾個閥門的開啟時間和關閉時間的實測值均小于要求的150ms。并且,電磁閥自動判讀軟件讀取的電壓和電流數據符合實際情況,與0.51Ω 的電阻值相對應。在繪制波形時,由于穩態時間較長,繪制波形時采取了截取拼接的算法,因此波形中間出現了斷層,驗證了電磁閥判讀原理和算法的正確性。
在輔助動力電磁閥的實驗中,以輔助動力1號閥、輔助動力3號閥為例,對其實驗數據進行分析。選取的兩個閥門的開啟時間和關閉時間的實測值均小于要求的150ms。并且電磁閥自動判讀軟件讀取的電流數據和顯示的電壓數據均符合實際情況,與1.00Ω 的電阻值相對應。在繪制波形時,輔助動力電磁閥的穩態時間較短,因此并沒有采用截取拼接的算法,直接讀取全部數據,繪制全程波形。
在新型電磁閥的實驗中,以發生器點火器和推力室點火器為例,對其實驗數據進行分析。在開啟時間1.15s內,對兩種新型電磁閥繪制全程波形,波形振蕩次數實測值均為要求值的29次,在誤差范圍內符合實際情況,驗證了對于新型電磁閥判讀算法的正確性和可行性。
5 結束語
本文對傳統電磁閥判讀算法進行研究,并在其基礎上對新型電磁閥判讀算法進行修改與更新。對于不同種類的電磁閥,根據電磁閥特性和判讀要求對算法的不同點和側重點進行研究和分析。文中通過實驗比較了電磁閥特征參數的實測值和要求值,對實驗中得到的數據進行了分析,并對實驗結果進行討論,驗證了算法的可行性。
隨著運載火箭的快速發展,電磁閥在運載火箭領域的應用越來越廣泛,越來越多種類的電磁閥也相繼出現。由于不同電磁閥特性不一樣,為了滿足所有電磁閥的特性,今后將在現有算法的基礎上加強對每個電磁閥判讀的針對性。同時為了避免算法冗余,加強對于電磁閥具有相同特性的部分的普遍性處理,從而更簡潔、更精確地實現對所有電磁閥的判讀。
猜你喜歡
作文·小學低年級(2025年2期)2025-02-13 00:00:00
小雪花·小學生快樂作文(2024年11期)2024-12-31 00:00:00
作文·小學低年級(2024年2期)2024-04-29 00:00:00
作文·小學低年級(2023年3期)2023-04-29 00:00:00
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
小主人報(2022年4期)2022-08-09 08:52:06
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55