分布式電動(dòng)客車制動(dòng)能量回收策略研究
2023-07-08 10:27:10孫照翔田言康
汽車實(shí)用技術(shù) 2023年12期
孫照翔,田言康
分布式電動(dòng)客車制動(dòng)能量回收策略研究
孫照翔1,田言康2
(1.長安大學(xué) 汽車學(xué)院,陜西 西安 710064;2.上汽集團(tuán)零束科技有限公司,上海 201804)
隨著目前“雙碳”目標(biāo)的提出,電動(dòng)車輛普及的速度空前絕后,尤其是在城市客車中的應(yīng)用。解決該問題的一個(gè)重要的手段就是設(shè)計(jì)出合理的制動(dòng)能量回收策略,盡可能吸收制動(dòng)時(shí)的能量,使得續(xù)駛里程增加。文章分別基于模糊控制算法和多目標(biāo)優(yōu)化算法設(shè)計(jì)了兩款制動(dòng)能量回收控制策略。為了驗(yàn)證控制策略的控制能力,搭建了基于TruckSim-Simulink的聯(lián)合仿真平臺(tái),最終結(jié)果表明,兩款控制策略均能實(shí)現(xiàn)制動(dòng)能量回收,其中多目標(biāo)優(yōu)化的控制策略的效果更好。
電動(dòng)客車;制動(dòng)能量回收;模糊控制;多目標(biāo)優(yōu)化
目前對(duì)于純電動(dòng)車來講,續(xù)航里程仍舊是一個(gè)繞不開的問題,其本身的電池需要提供車身上所有用電設(shè)備的能量和汽車的動(dòng)力。且從實(shí)際情況來看,盡管許多汽車的最大續(xù)航里程與油車不相上下,但是,當(dāng)氣溫或其他的使用條件發(fā)生變化時(shí),續(xù)航里程就會(huì)下降很多。
針對(duì)該問題,電動(dòng)車可以通過自身配備的驅(qū)動(dòng)電機(jī),來實(shí)現(xiàn)制動(dòng)能量回收,從而減緩電動(dòng)車電能的損耗,增加續(xù)航里程[1]。本文通過分析制動(dòng)能量回收的影響因素分別作出了基于模糊控制和多目標(biāo)優(yōu)化的制動(dòng)力矩分配策略。并使用Cruise、Simulink以及Trucksim對(duì)兩種控制策略進(jìn)行了仿真驗(yàn)證。
1 整車動(dòng)力系統(tǒng)方案設(shè)計(jì)
1.1 動(dòng)力系統(tǒng)總體結(jié)構(gòu)框架
制動(dòng)能量回收系統(tǒng)分為并聯(lián)式和串聯(lián)式。由于并聯(lián)式的制動(dòng)能量回收效率低下且當(dāng)使用條件發(fā)生變化時(shí)會(huì)造成制動(dòng)踏板的操縱感發(fā)生變化,影響行車安全性[2]。故本文所采用的制動(dòng)系統(tǒng)是如圖1所示的串聯(lián)式復(fù)合系統(tǒng)。制動(dòng)踏板將電壓信號(hào)傳遞給整車控制單元(Vehicle Control Unit, VCU),然后被解析用于制動(dòng)能量控制策略,使其合理的分配前后輪制動(dòng)力,而后向壓力傳動(dòng)控制器和電機(jī)控制器輸入所需的制動(dòng)力矩信號(hào)。與此同時(shí)VCU將接收到電機(jī)最大制動(dòng)轉(zhuǎn)矩、機(jī)械制動(dòng)轉(zhuǎn)矩及汽車電池荷電狀態(tài)(State Of Charge, SOC)等反饋信號(hào),VCU再根據(jù)這些信息調(diào)整制動(dòng)力分配。整車使用的是如圖2所示的雙回路氣壓傳動(dòng)系統(tǒng)。
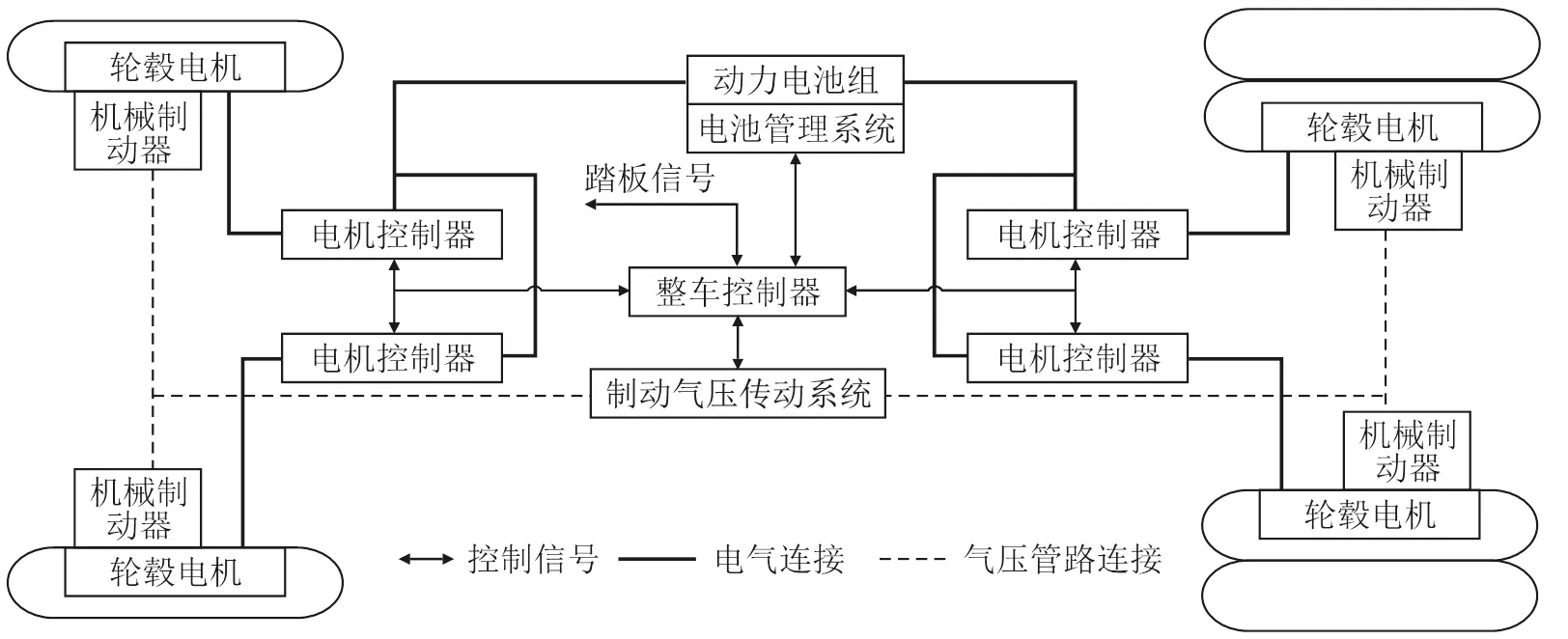
圖1 動(dòng)力系統(tǒng)的總體結(jié)構(gòu)
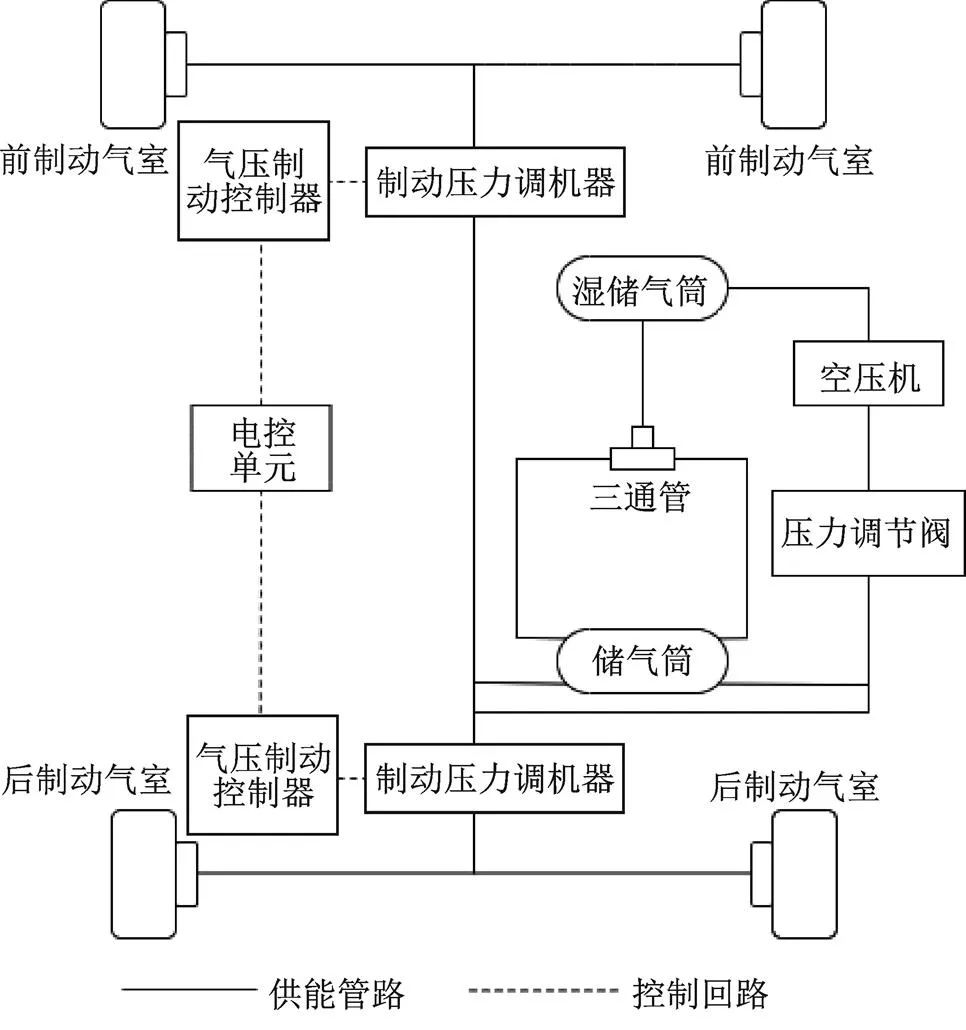
圖2 雙回路制動(dòng)氣壓傳動(dòng)系統(tǒng)
1.2 整車基本參數(shù)及動(dòng)力參數(shù)
本文中的研究對(duì)象是過的純電動(dòng)城市客車,具體參數(shù)如表1、表2所示。
表1 整車基本參數(shù)
基本參數(shù)符號(hào)數(shù)值 長×寬×高/mmL×B×H10 495×2 500×3 210 整備質(zhì)量/kgM11 400 最大質(zhì)量/kgm16 500 軸距/mmWb6 100 車輪滾動(dòng)半徑/mr0.465 滾動(dòng)阻力系數(shù)f0.012 空氣阻力系數(shù)CD0.55 轉(zhuǎn)動(dòng)慣量換算系數(shù)Δ1.05 驅(qū)動(dòng)系統(tǒng)總傳動(dòng)效率ηt0.94
表2 輪轂電機(jī)性能參數(shù)
參數(shù)前輪轂電機(jī)參數(shù)后輪轂電機(jī)參數(shù) 額定功率/kW2038 峰值功率/kW3872 額定轉(zhuǎn)矩/(N?m)95185 峰值轉(zhuǎn)矩/(N?m)180360 額定轉(zhuǎn)速/(r?min-1)2 0102 065 峰值轉(zhuǎn)速/(r?min-1)7 0007 000
電池選擇某廠家生產(chǎn)的磷酸鐵鋰電池組,采用6并150串的方式組成,具體參數(shù)如表3所示。
表3 電池性能參數(shù)
項(xiàng)目參數(shù) 額定電壓/V540 單體電壓/V3.6 電池組電壓范圍/V470.4~613.2 額定容量/Ah432 單體容量/Ah72 總能量/ kWh235
2 基于模糊控制的制動(dòng)力分配策略
2.1 制動(dòng)動(dòng)力學(xué)分析
根據(jù)文獻(xiàn)[3]可知,汽車制動(dòng)時(shí)的受力狀況如圖3所示。
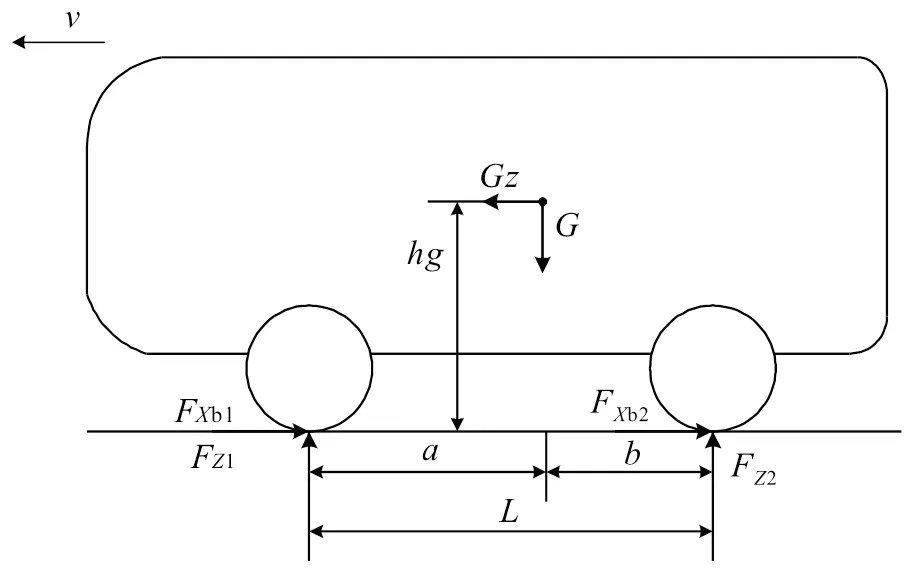
圖3 汽車制動(dòng)時(shí)的受力圖
復(fù)合制動(dòng)系統(tǒng)中,制動(dòng)力按式(1),式(2)計(jì)算:
式中,μ1、μ2為前后輪所受的復(fù)合制動(dòng)力,N;af、ar為前后輪所受到的機(jī)械制動(dòng)力,N;mf、mr為前后輪所受電機(jī)制動(dòng)力,N。
則前后輪所受地面制動(dòng)力按式(3)、式(4)計(jì)算:
2.2 制動(dòng)能量回收的影響因素
結(jié)合文獻(xiàn)[4],本文認(rèn)為制動(dòng)能量回收的效果主要和以下因素有關(guān):
1)電機(jī)轉(zhuǎn)速:電機(jī)轉(zhuǎn)速過低時(shí),無法進(jìn)行制動(dòng)能量回收;當(dāng)電機(jī)轉(zhuǎn)速變大,進(jìn)入弱磁調(diào)速時(shí),電機(jī)所能提供的再生制動(dòng)轉(zhuǎn)矩也慢慢變小。
2)動(dòng)力電池:在制動(dòng)能量回收控制策略設(shè)計(jì)時(shí),需要把電池SOC考慮進(jìn)去,否則,當(dāng)過高時(shí),可能會(huì)出現(xiàn)電池的過充,從而損傷電池。
3)制動(dòng)強(qiáng)度:當(dāng)制動(dòng)強(qiáng)度小于0.1時(shí),制動(dòng)力可全部由電機(jī)提供;當(dāng)制動(dòng)強(qiáng)度大于0.7時(shí),認(rèn)為該工況為緊急制動(dòng),為保證制動(dòng)安全性,進(jìn)機(jī)械制動(dòng)系統(tǒng)提供制動(dòng)力;當(dāng)制動(dòng)強(qiáng)度處于0.1~0.7之間,需考慮電池SOC、制動(dòng)初速度等各種因素,從而合理分配電機(jī)和機(jī)械的制動(dòng)力大小。
2.3 模糊控制器的設(shè)計(jì)
2.3.1模糊集論域及語言
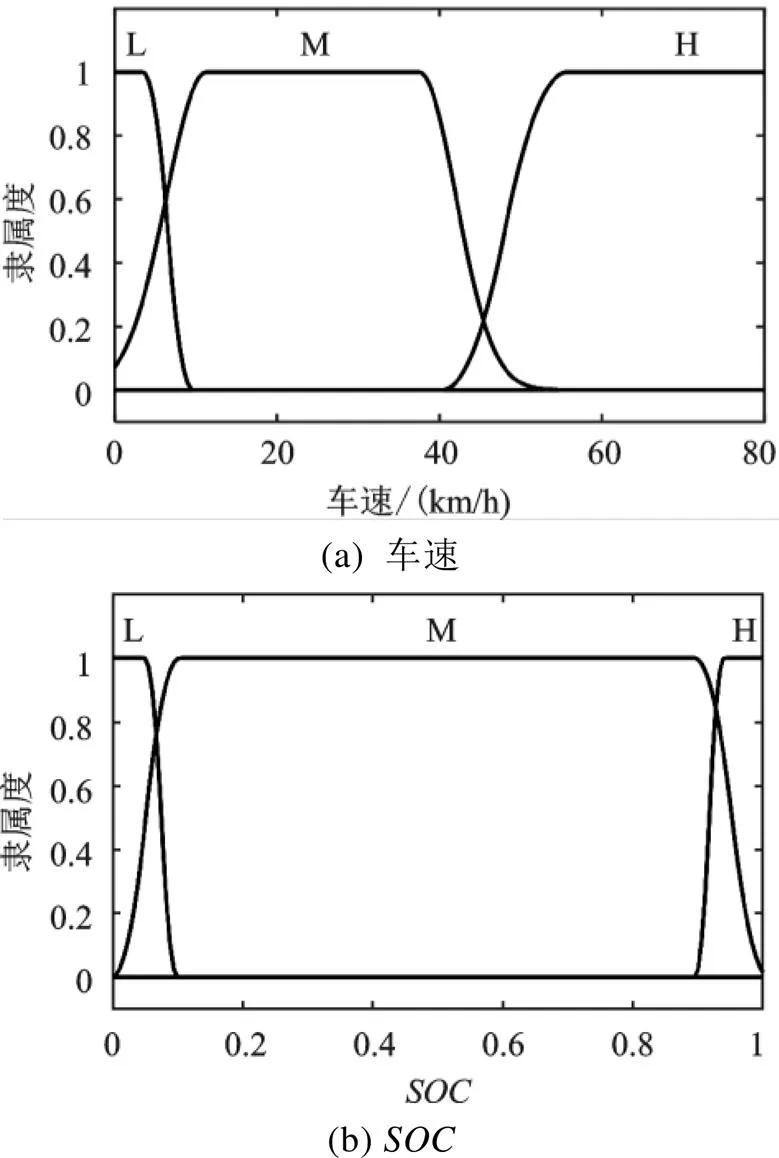
表4中,為速度;為電池的SOC;為制動(dòng)強(qiáng)度;為再生制動(dòng)的占比。和的語言依次為“低、中、高”,和的語言依次為“很小、較小、中等、較大、很大”。
表4 模糊集論域及語言
參數(shù)模糊集論域模糊集語言 V[0,80]S M B SOC[0,1]S M B Z[0,1]NB NS ZR PS PB K[0,1]VL L M H VH
2.3.2模糊控制的隸屬度函數(shù)及規(guī)則
該模糊控制器中各輸入輸出的隸屬度函數(shù)如圖4所示。
本文所設(shè)計(jì)的模糊控制器模糊規(guī)則如表5所示,S、M、B分別表示參數(shù)數(shù)值的小中大,NB、NS、ZR、PS、PB分別表示數(shù)值極小、較小、中等、較大和極大。VL、L、M、H、VH表示輸出數(shù)值極小、較小、中等、較大和極大。
表5 模糊規(guī)則表
vSOCz NBNSZRPSPB SSVHVHVHHH MVHVHVHHH BLLVLVLVL MSVHVHVHHM MVHVHHMM BMLLVLVL BSVHHLVLVL MVHHMLVL BLLVLVLVL
2.3.3修正因子
結(jié)合2.2部分所提到的內(nèi)容,當(dāng)車速較低時(shí),電機(jī)無法進(jìn)行能量回收,此時(shí),應(yīng)該等于0。為了在制動(dòng)時(shí)能夠保證制動(dòng)模式切換平滑,故我們引入一個(gè)修正因子K。
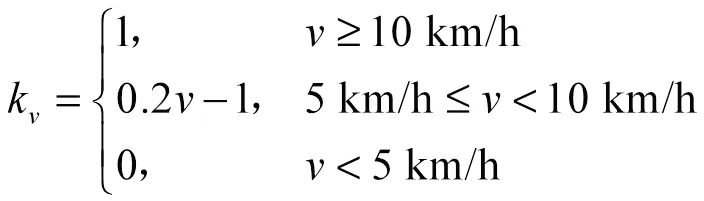
此時(shí),再生制動(dòng)的占比為
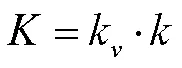
基于模糊控制的制動(dòng)能量回收策略的具體流程如圖5所示。
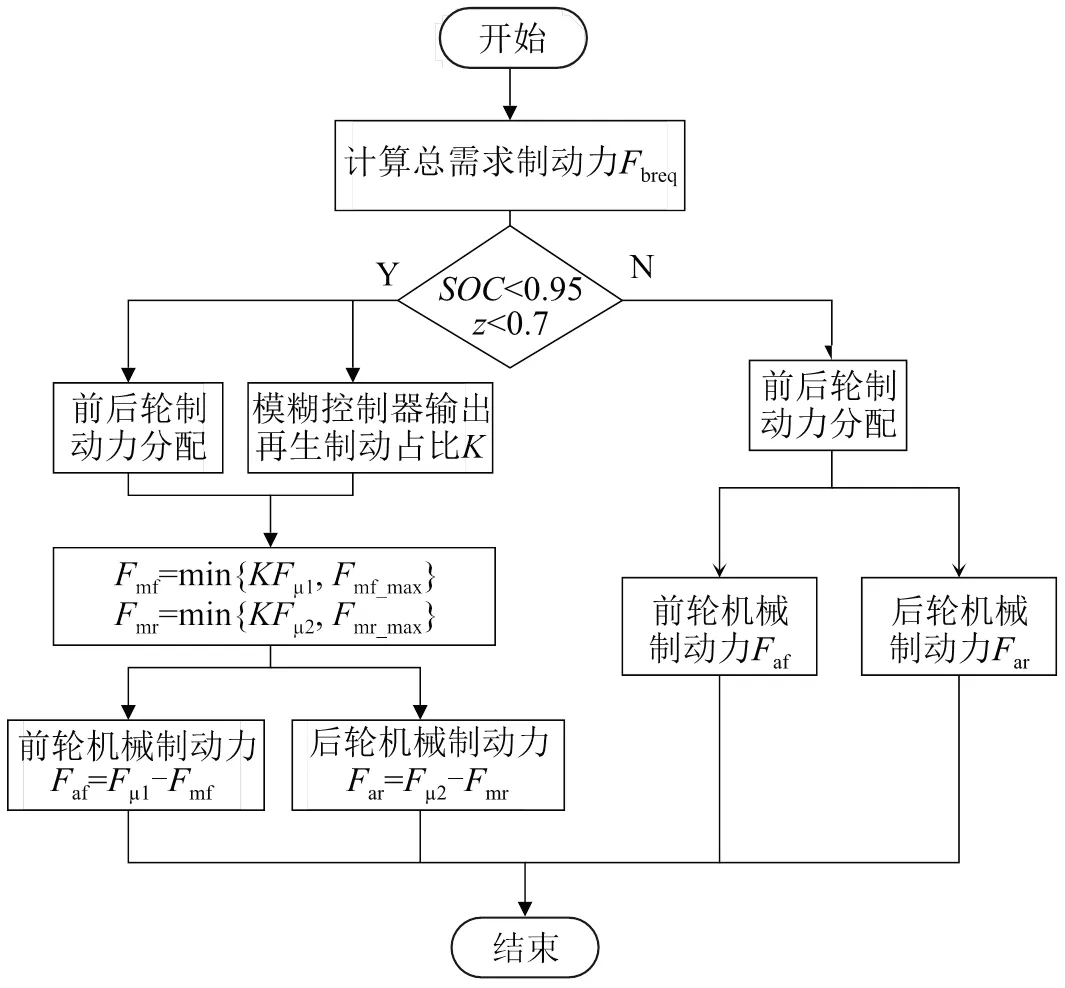
圖5 模糊控制制動(dòng)能量回收控制策略
當(dāng)滿足制動(dòng)能量回收條件時(shí),為使前后制動(dòng)力分配按I分配,可以由模糊控制器計(jì)算出前后輪電機(jī)制動(dòng)轉(zhuǎn)矩和機(jī)械制動(dòng)的壓力計(jì)算公式為
式中,B為有效摩擦半徑,m;B為制動(dòng)輪缸的活塞面積,m2;B為制動(dòng)效能因子;B為摩擦系數(shù)。
3 基于多目標(biāo)優(yōu)化的制動(dòng)力分配策略
由于采用模糊控制器時(shí),它的隸屬度函數(shù)及模糊規(guī)則的獲取需要大量的實(shí)驗(yàn)驗(yàn)證,且極有可能無法使得制動(dòng)能量回收的效率達(dá)到最大,故本文提出了基于粒子群算法的多目標(biāo)優(yōu)化制動(dòng)力矩的分配策略,這種方法能夠在保證車輛制動(dòng)穩(wěn)定性的條件下,增大能量回收的效率。
3.1 目標(biāo)函數(shù)及設(shè)計(jì)變量的選取
車輛前后輪的利用附著系數(shù)計(jì)算公式為
式中,為前輪總的制動(dòng)力占車輛總制動(dòng)力的比值。
為了使得制動(dòng)時(shí),車輛仍能進(jìn)行穩(wěn)定行駛,這里定義一個(gè)制動(dòng)穩(wěn)定性系數(shù):

該系數(shù)越小時(shí),制動(dòng)力分配將越合理。故將此作為優(yōu)化制動(dòng)穩(wěn)定性的目標(biāo)函數(shù)。
因?yàn)閯?dòng)力電池的充電功率會(huì)對(duì)制動(dòng)能量回收的效率產(chǎn)生影響,故將此作為制動(dòng)時(shí)車輛經(jīng)濟(jì)性的優(yōu)化目標(biāo)函數(shù)。結(jié)合輪轂電機(jī)的有效發(fā)電功率與動(dòng)力電池的有效制動(dòng)功率計(jì)算公式,最終定義優(yōu)化目標(biāo)函數(shù)為
式中,1、2為單個(gè)輪轂電機(jī)當(dāng)前轉(zhuǎn)速、當(dāng)前再生制動(dòng)力矩輸出的發(fā)電效率;ch為動(dòng)力電池的充電效率。
這里,本文選擇設(shè)計(jì)變量為前后輪的機(jī)械制動(dòng)力和再生制動(dòng)力:

3.2 約束條件的確定
如2.2部分提到的電機(jī)低轉(zhuǎn)速時(shí),無法提供制動(dòng)力矩,當(dāng)轉(zhuǎn)速增大至恒扭矩時(shí),可以提供較大的制動(dòng)轉(zhuǎn)矩,再增大時(shí),制動(dòng)轉(zhuǎn)矩減小。為避免過充電現(xiàn)象,各個(gè)電機(jī)的發(fā)電功率之和應(yīng)小于電池的最大充電功率,故應(yīng)滿足:
式中,chmax為電池的最大充電功率,kW;m1_max、m2_max、m3_max、m4_max分別為各輪電機(jī)的最大制動(dòng)力矩,N·m。
為了使得制動(dòng)效能和制動(dòng)安全性能夠到達(dá)要求,各制動(dòng)力之和應(yīng)滿足制動(dòng)力需求:
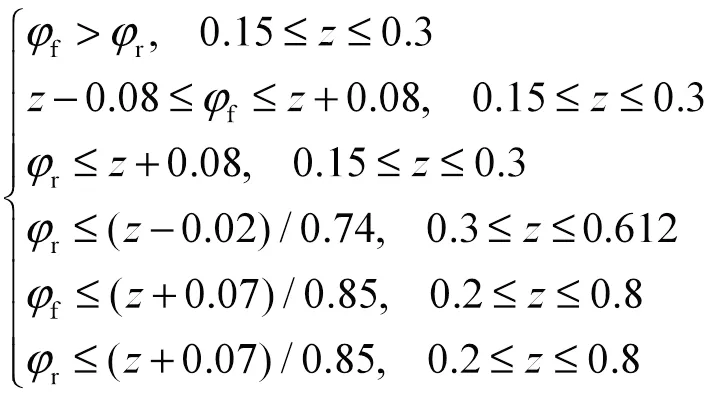
此外,我國相關(guān)法規(guī)標(biāo)準(zhǔn)對(duì)于商用車的前后輪制動(dòng)力分配還有明確的要求,當(dāng)路面附著系數(shù)處于0.2~0.8之間時(shí),f和r需要滿足以下要求:
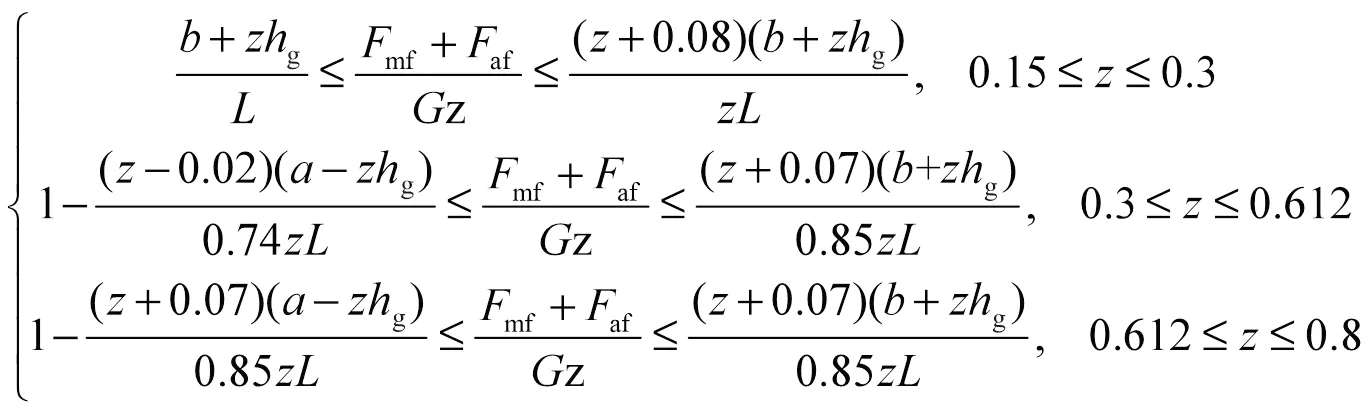
通過對(duì)式(18)的整理,最后得到制動(dòng)力分配的約束條件如下:
3.3 多目標(biāo)粒子群算法
粒子群算法具有迭代格式簡單、收斂速度快的優(yōu)點(diǎn),故這里使用多目標(biāo)粒子群算法解決上述優(yōu)化問題。流程[5]如圖6所示。
1)首先是初始化,將粒子群規(guī)模設(shè)置為100,儲(chǔ)備集為50,迭代次數(shù)設(shè)為100。初始化約束條件,利用目標(biāo)函數(shù)計(jì)算粒子的適應(yīng)度,將非劣解通過Pareto支配關(guān)系添至儲(chǔ)備集0。
2)采用非劣解網(wǎng)格估計(jì)法,在第個(gè)儲(chǔ)備集R中搜索最優(yōu)解,把目標(biāo)空間劃分為多個(gè)小網(wǎng)格,在R中選擇粒子群的全局引導(dǎo)者,其可表示為


式中,(r)為儲(chǔ)備集中第個(gè)粒子所在網(wǎng)格的粒子數(shù),這里的r為第個(gè)儲(chǔ)備集中,第個(gè)粒子的適應(yīng)度;S為儲(chǔ)備集中比粒子更優(yōu)的粒子組成的粒子集;?為Pareto中的優(yōu)先關(guān)系。
3)更新粒子的速度與位置。計(jì)算適應(yīng)度函數(shù),并根據(jù)支配關(guān)系更新個(gè)體引導(dǎo)者P具體公式如下:


式中,為動(dòng)力常量;1為個(gè)體引導(dǎo)學(xué)習(xí)因子;2為全局引導(dǎo)學(xué)習(xí)因子;1、2均為服從[0,1]均勻分布且是相互獨(dú)立的偽隨機(jī)數(shù)。
4)更新粒子群的儲(chǔ)備集,判斷是否滿足終止條件,終止條件為是否滿足最大迭代次數(shù)或是否處于最優(yōu)位置最小閾值。滿足則停止迭代,儲(chǔ)備集為Pareto的最優(yōu)解集;不滿足則重復(fù)步驟2)、步驟3)。
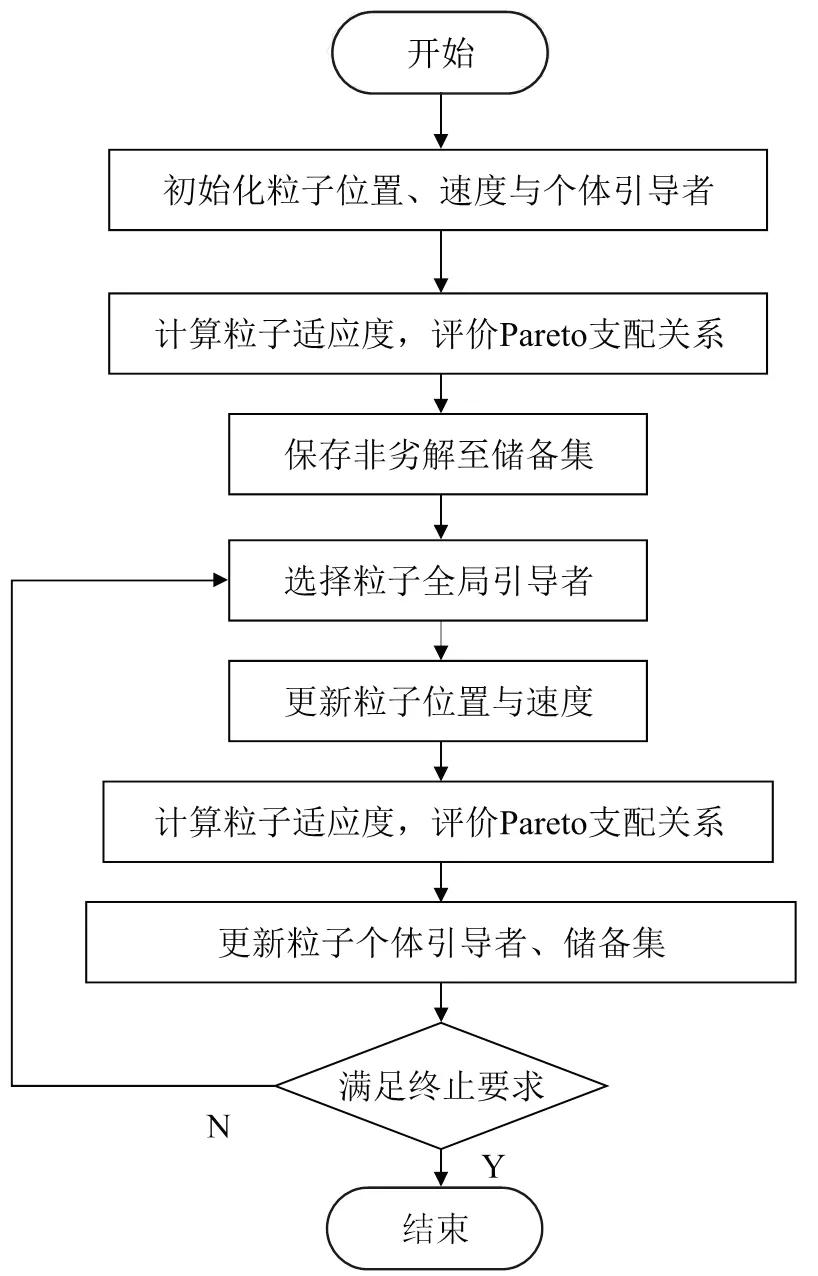
圖6 多目標(biāo)優(yōu)化算法流程
4 控制策略的仿真分析
本部分建立基于Cruise和TruckSim的整車聯(lián)合仿真模型,并于Simulink中搭建相關(guān)的控制策略模型,針對(duì)不同的制動(dòng)工況進(jìn)行控制策略驗(yàn)證。
4.1 評(píng)價(jià)指標(biāo)
根據(jù)行業(yè)標(biāo)準(zhǔn)[6],車輛在制動(dòng)時(shí),可回收的能量大小為

式中,ra為可回收能量,J;v0為第次制動(dòng)時(shí)的初速度,m/s;vend為第次制動(dòng)時(shí)的末速度,m/s;v為第次制動(dòng)采樣時(shí)刻的行駛車速,m/s;t0為第次制動(dòng)的起始時(shí)刻,s;tend為第次制動(dòng)的結(jié)束時(shí)刻,s;、、為車輛滑行系數(shù)。
車輛制動(dòng)實(shí)際回收的能量大小為
式中,r為實(shí)際回收能量,J;U為第次制動(dòng)時(shí)時(shí)電池的充電電壓,V;I為第次制動(dòng)時(shí)時(shí)電池的充電電流,A。
故制動(dòng)能量回收率的定義為
4.2 各種制動(dòng)強(qiáng)度下的仿真分析
4.2.1輕度制動(dòng)
車輛的輕度制動(dòng)時(shí),車輛初始參數(shù):車輛滿載初始車速為54 km/h、路面附著系數(shù)為0.8、初始為0.7、制動(dòng)減速度為0.1。
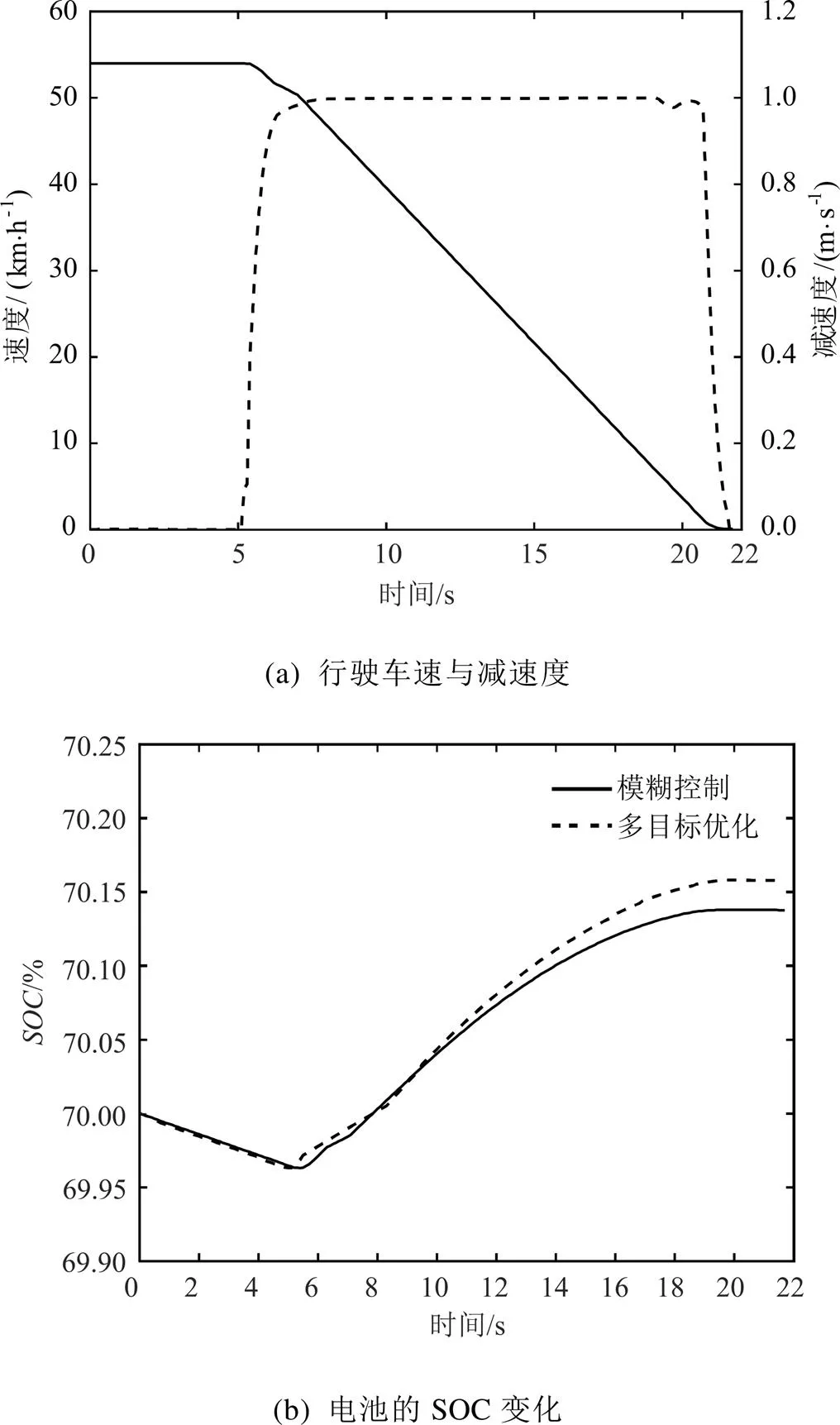
圖7 輕度制動(dòng)仿真結(jié)果
從圖7可以看出,多目標(biāo)優(yōu)化的控制策略能夠使得制動(dòng)回收的能量比模糊控制策略的更多。具體在數(shù)值上的差別參如表6所示。
表6 輕度制動(dòng)時(shí)制動(dòng)能量回收結(jié)果
控制策略模糊控制多目標(biāo)優(yōu)化 制動(dòng)結(jié)束SOC0.713 80.715 8 實(shí)際能量回收/kJ1 266.8751 415.125 能量回收率/%73.8382.46 能量消耗率/(kWh/100km)104.0796.89
4.2.2 中度制動(dòng)
車輛中度制動(dòng)工況的具體參數(shù)與輕度制動(dòng)只有制動(dòng)減速度大小發(fā)生改變,中度制動(dòng)的制動(dòng)減速度為3 m/s2。
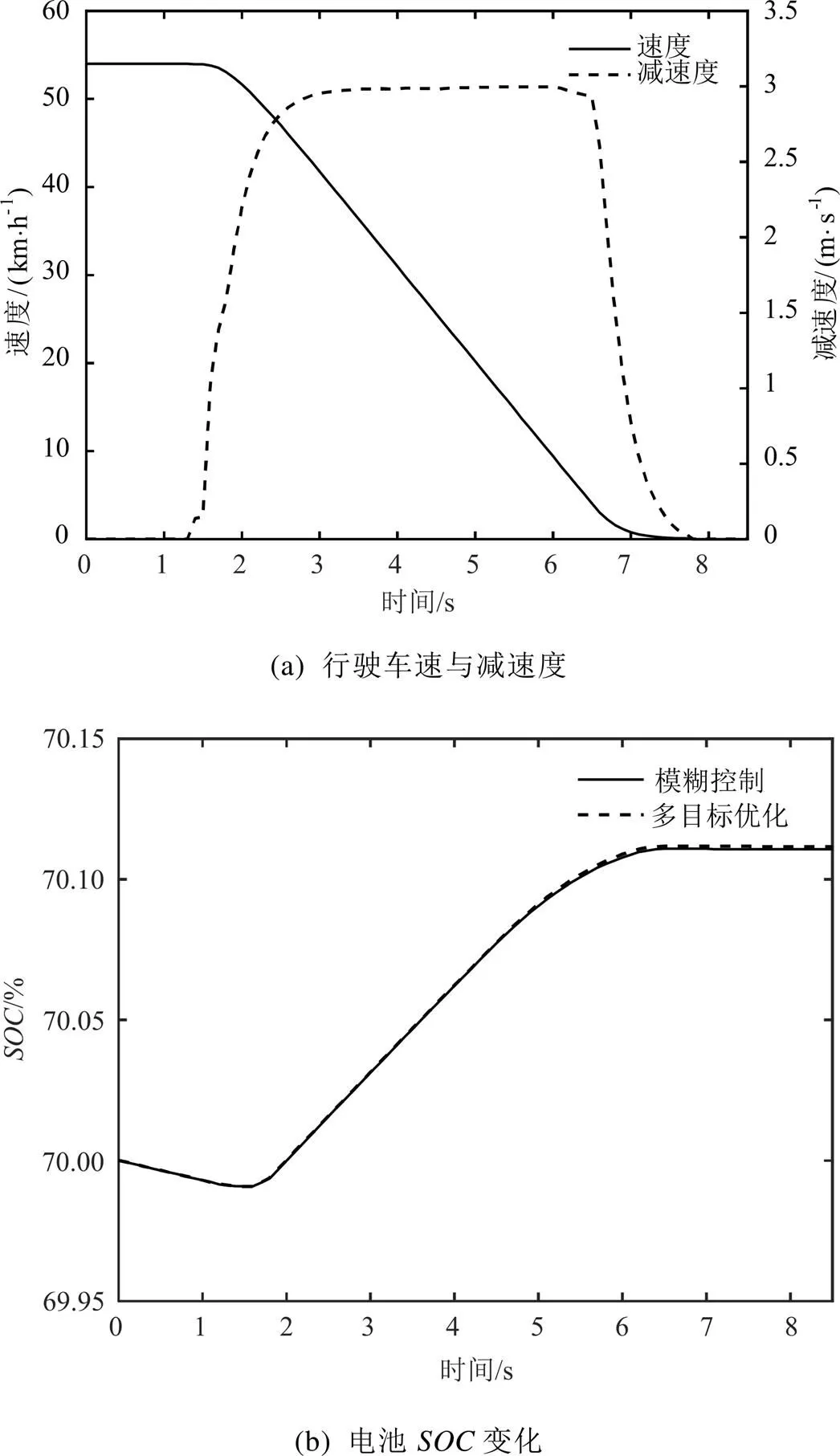
圖8 中度制動(dòng)仿真結(jié)果
從圖8中能夠看出,在兩種控制策略的作用下,電池的變化曲線近乎一致,從數(shù)據(jù)上看,制動(dòng)能量的回收效率隨著制動(dòng)減速度的增大,能夠被回收的能量變得越來越少。具體數(shù)值上的差異參如表7所示。
表7 中度制動(dòng)時(shí)制動(dòng)能量回收結(jié)果
控制策略模糊控制多目標(biāo)優(yōu)化 制動(dòng)結(jié)束SOC0.711 10.711 6 實(shí)際能量回收/kJ936.653944.539 能量回收率/%54.5855.04 能量消耗率/(kWh/100 km)137.9138.34
4.2.3 循環(huán)工況下的仿真分析
該部分采用中國典型城市公交循環(huán)工況(China City Bus Cycle, CCBC)進(jìn)行制動(dòng)能量回收的仿真分析,具體的工況如圖9所示,為充分展示兩種控制策略對(duì)于電池的影響,此處設(shè)定初始為0.7。從圖10中,我們可以看出這兩種控制策略均可使車速誤差在0.4 m/s2之內(nèi),說明這兩種策略能夠保證車輛的跟隨性。
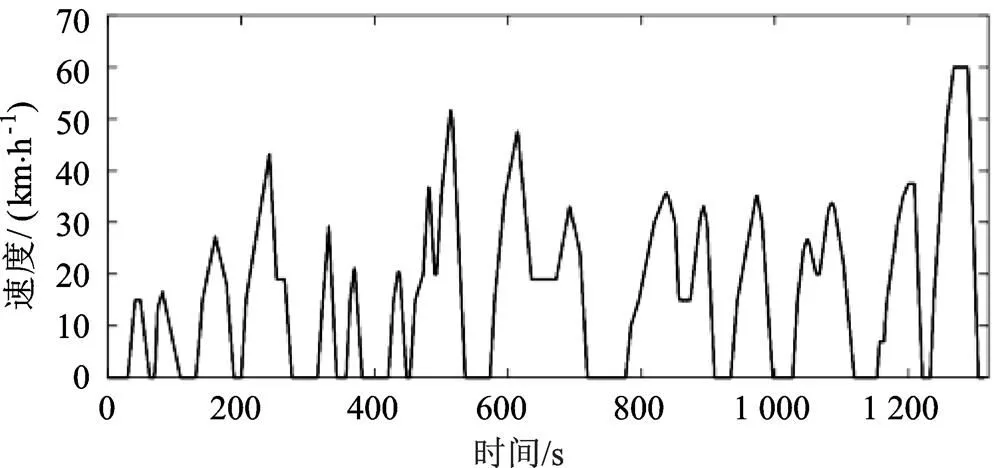
圖9 CCBC工況
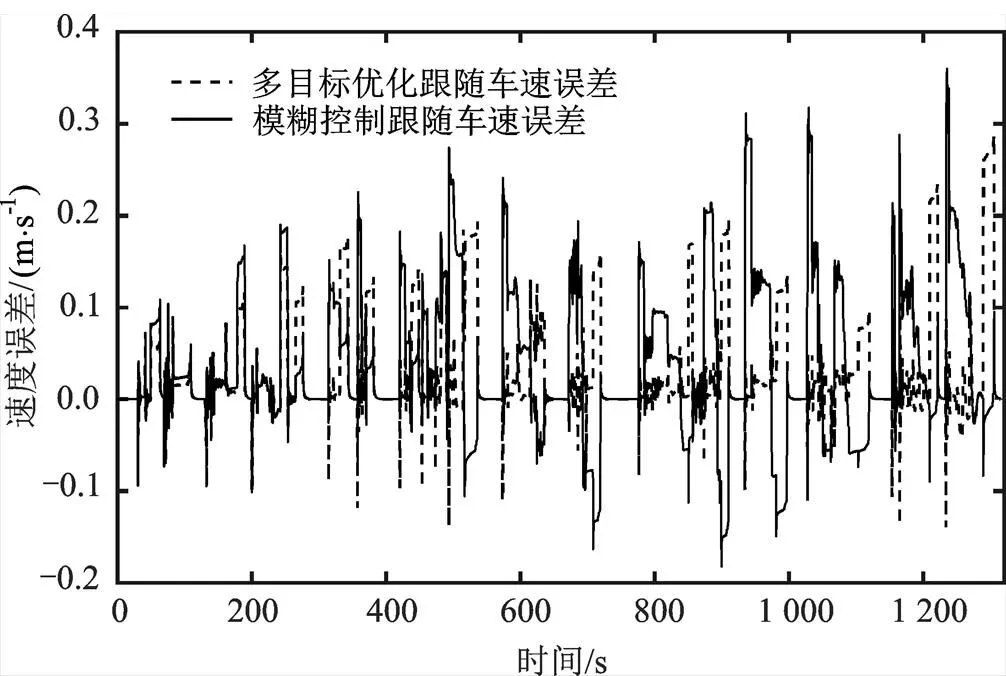
圖10 CCBC工況下車速跟蹤誤差

圖11 CCBC工況下SOC變化曲線
表8 CCBC工況下制動(dòng)能量回收效果
控制策略無再生制動(dòng)模糊控制多目標(biāo)優(yōu)化 工況結(jié)束SOC0.659 50.670 20.671 4 實(shí)際回收能量(kJ)07 289.2398 194.388 能量回收率/%068.7177.23 能量消耗率/(kWh/100 km)124.3388.9585 回收能量占輸出百分比/%027.6531.08
從圖11和表8中可以看出,本文所提出的兩種制動(dòng)能量回收的控制算法均能產(chǎn)生明顯的效果,其中,采用多目標(biāo)優(yōu)化制動(dòng)能量回收方法的能量回收率比模糊控制高8.52%,說明本文提出的兩種制動(dòng)能量回收控制策略可以提高續(xù)駛里程,且多目標(biāo)優(yōu)化的方法更好。
5 總結(jié)
本文提出了兩種針對(duì)制動(dòng)能量回收的控制策略,并對(duì)其基于Cruise與Trucksim進(jìn)行了聯(lián)合仿真,最終結(jié)果表明,兩種控制策略均能較好地實(shí)現(xiàn)制動(dòng)能量回收,多目標(biāo)優(yōu)化的方法更優(yōu)。
[1] EHSANI M,GAO Y M,BUTLER K L.Application of Electrically Peaking Hybrid (ELPH) Propulsion Sys- tem to a Full-size Passenger Car with Simulated Design Verification[J].IEEE Transactions on Vehicular Tech- nology,1999,48(6):1779-1787.
[2] 仇斌.電動(dòng)城市公交車制動(dòng)能量回收過程中的能量效率研究[D].北京:清華大學(xué),2011.
[3] 余志生.汽車?yán)碚揫M].北京:機(jī)械工業(yè)出版社,2009.
[4] 李司光,祁星鑫.電動(dòng)客車制動(dòng)能量回收分析研究[J].汽車實(shí)用技術(shù),2016,41(3):106-108.
[5] 章恩澤.多目標(biāo)粒子群優(yōu)化算法及其應(yīng)用研究[D].南京:南京理工大學(xué),2016.
[6] 中國汽車工程學(xué)會(huì).純電動(dòng)汽車再生制動(dòng)能量回收效能快速評(píng)價(jià)及試驗(yàn)方法:T/CSAE 76-2018[S].北京:機(jī)械工業(yè)出版社,2018.
Research on Braking Energy Recovery Strategy of Distributed Electric Bus
SUN Zhaoxiang1, TIAN Yankang2
( 1.College of Automobile, Chang'an University, Xi'an 710064, China;2.SAIC Zero Beam Technology Company Limited, Shanghai 201804, China)
With the proposal of the current "double carbon" goal, the popularity of electric vehicles is unprecedented, especially in the application of city buses.An important means to solve this problem is to design a reasonable braking energy recovery strategy to absorb the braking energy as much as possible, so as to increase the driving range. In this paper, based on fuzzy control algorithm and multi-objective optimization algorithm, two control strategies for braking energy recovery are designed. To verify the control capability of the control strategy, built a joint simulation platform based on TruckSim-Simulink, the final results show that the two control strategies can achieve brake energy recovery, and the multi-objective optimization control strategy is better.
Electric bus; Brake energy recovery; Fuzzy control; Multi-objective optimization
孫照翔(1999-),男,碩士研究生,研究方向?yàn)槠囯娍丶夹g(shù),E-mail:sunzhaoxiang1999@163.com。
U469.72
A
1671-7988(2023)12-27-08
10.16638/j.cnki.1671-7988.2023.012.006
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24