室內環境下基于UWB定位系統的智能標簽應用研究
2023-07-10 14:33:19潘佳寧曹會國
計算機應用文摘 2023年11期
潘佳寧 曹會國

關鍵詞:UWB;室內定位;無線電通信;云平臺位置服務;社會服務
中圖法分類號:TN925 文獻標識碼:A
1引言
近年來,隨著導航定位應用和無線電通信技術的快速發展,基于位置精準度的服務逐漸成為大眾用戶的迫切需求和眾多專家以及企業的研究熱點。特別是在情景感知、醫療器械、科學研發、商業服務、休閑娛樂等領域,基于位置精準度的服務應用更加廣泛。全球衛星導航系統(Global Navigation Satellite System,GNSS)是室外環境下最常用的導航定位技術,可以實現米級定位,但是人們有近70%~90%的時間是在室內區域活動,GNSS衛星信號由于受到地面建筑物墻體阻礙,難以獲得精準的定位數據,逐漸出現了許多室內定位技術。其中,超寬帶(Ultra Wide Band,UWB)技術屬于基于無線電的室內定位技術,作為一項新型無線交匯定位技術,具有抗干擾能力強、功耗低、抗多徑效果好、安全性高、測距精度高等優點,可以通過測量載波信號在定位標簽與定位基站之間的傳輸時間、角度、信號強度等方式實現厘米級室內定位精度,填補了高精度定位范疇的空白。
2室內UWB定位總體系統設計
智能標簽定位系統主要包括UWB定位模塊和信息交互模塊,供電模塊采用鋰離子電池,支持4pin的磁吸充電,外部由ABS工程塑料構成的框架組成。定位模塊包括官方DWM1000定位模塊和輔助聲光定位模塊,在查找功能進行時,加以聲、光信號的協同定位,實現“點”的精準定位;信息交互模塊實現上、下位機的交互:上位機定位模式分為A類二維定位方式和B類三維定位方式。
根據定位標簽坐標和基站坐標所得方程組,結合最小二乘法理論,得出本系統所用的2套方案,二維平面定位至少需要3個固定基站,三維定位至少需要4個固定基站,故基站分布情況也對定位精度有重要影響。分別利用最小二乘法仿真定位算法可得,基站分散分布時的定位效果明顯好于基站位于同一水平線分布時的效果,如圖1、圖2所示。
3系統硬件設計
3.1智能標簽定位系統的設計
此定位標簽旨在應用于人流密集或物品集中擺放的場景中,而此場景中每個物品所占用空間有限,因此,定位裝置的體積必須小巧,不搶占存放空間。故智能標簽體積為8 cm(長)×2 cm(寬)×0.8 cm(厚),輕便小巧,可以方便地固定于物品存放的具體位置(如試劑柜內部上方或者冰箱內部)。
3.2硬件通信設計
在設計和實施整個項目時,標簽節點的位置不僅與距離信息有關,還與每個基站的固定坐標有關。由于基站的位置不是固定的,可以根據實際場景將其布置在任何位置,因此,基站1節點無法預先知道其他基站節點的坐標信息,也無法根據接收到的距離信息計算標簽位置。針對此問題,本系統硬件要求將基站0通過串口接主控STM32F103C8T6,主控板接藍牙模塊。基站的1節點通過串行接口連接到PC。UWB模塊可以通過DWM1000測得各個基站與標簽的距離,并將距離信息匯總傳輸給基站0,基站0將最終的距離信息傳送至移動云端。其中,藍牙信息交互模塊是基站與移動云端進行無線數據傳輸的重要模塊。
4軟件設計
4.1系統軟件設計
在云端,基站將接收到的距離信息進行處理,推算出距離,云端可上傳模型信息,位置和行列信息都可以在模型中顯示,在搜索框中輸入要找的物品或對應的標簽ID,標簽也將做出相應回答。移動終端的數據是由藍牙傳輸的,數據處理是由主控板完成的,藍牙將位置信息和行列信息顯示在移動終端。
構成智能標簽系統的云平臺的顯示端使用微信小程序,這是用戶鏈接服務的新方式。其無需下載和安裝應用程序,就可以獲得所需的服務,并擁有出色的用戶體驗。二維碼技術可以滿足用戶日益增長的信息需求。標簽持有者只需將二維碼綁定到要定位的人(物品)并輸入其信息或特征,即可通過標簽實時檢索位置信息,同時實現查找功能。目前,LBS云平臺(基于位置的服務)和其他平臺被廣泛用于信息定位,并取得了一些良好的研究成果。
4.2定位算法
UWB定位不需要使用傳統定位方式中傳輸信息的載波,如超聲波、激光等,而是利用電子標簽設備發送具有納秒或納秒級以下的非正弦窄脈沖來傳輸數據,定位基站接收,再通過計算時間差來定位。
UWB本身的算法改進也被廣泛應用于導航定位,由于定位計算過程中有一定的誤差,通常推薦標簽活動范圍盡量在某一平面范圍內,且室內環境復雜,在UWB定位過程中存在大量干擾及NLOS情況。針對測量精度和人類移動自適應定位問題,本項目采用UWB和PDR室內定位算法融合定位。
首先采用4個或以上基站的測距結果構建虛擬場景定位,分別給標簽和基站燒錄初始定位程序,將BPhero-UWB模塊通過StlinkV2與PC相連,放置好基站,本文引入卡爾曼濾波器協助判斷NLOS場景。當濾波進程中沒有監測到進入NLOS場景,卡爾曼濾波會正常迭代;若進入NLOS場景,則構建定位解算方程組,選取在非視距情況下定位誤差敏感的CHAN方法進行解算,PDR定位不受NLOS影響,因此可以使用PDR定位來支持NLOS場景的UWB定位。該融合定位算法有效地降低了NLOS情況下UWB的定位誤差,將平均定位誤差降低到0.137.比單一UWB定位精度高約68%,對建筑工地、倉庫等大型室內區域的長期高精度定位具有一定的參考價值。
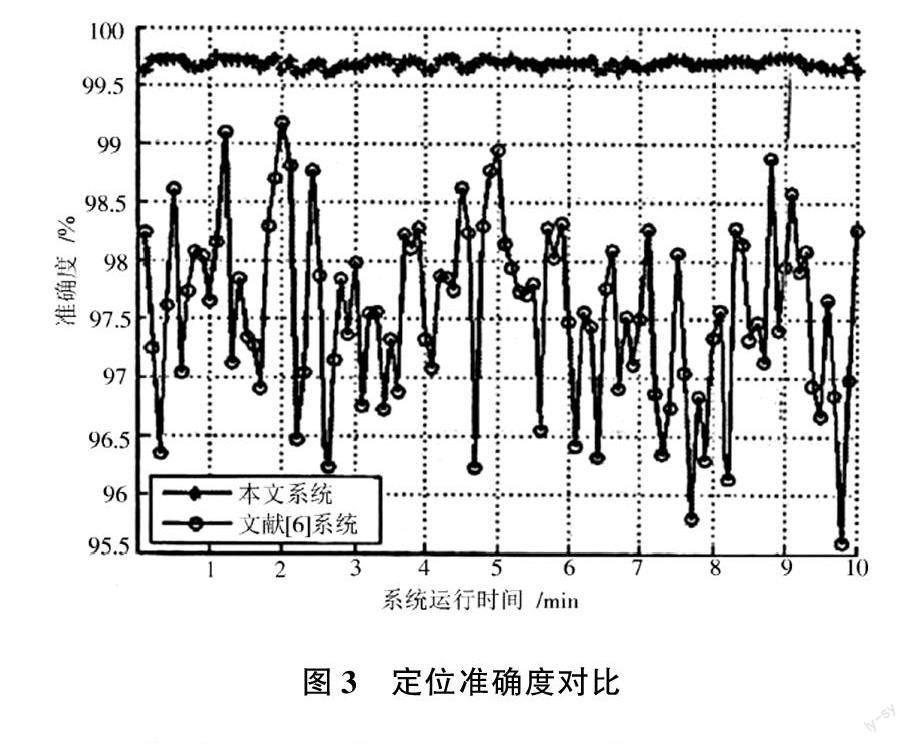
通過將本文系統的定位精度與文獻系統在微信小程序二維碼范圍內的定位精度進行比較,驗證了該方法的定位精度。為了使實驗更準確,將系統正常運行時間設置為10 min。在相同條件下,將本文系統的定位精度與文獻中的系統進行比較。實驗結果如圖3所示。
4.3室內定位系統上位機設計
信息交互是在云端和系統板上進行的,三維定位的信息交互系統是應用QT軟件,以及MATALB語言進行編寫的小程序,通過軟件藍牙調試器直接進行通信;二維定位則是在云端進行標簽的查詢時,在云端、手機端輸入標簽的名稱或者標簽的ID,對應標簽的LED燈會閃爍,蜂鳴器響。基站0將最終基站信息傳輸到計算機云端,在云端進行數據的處理,并將具體的位置信息顯示在云端對應的3D模型中,以便客戶更為直觀的了解。在云端,用戶也可以進行標簽位置以及運動軌跡的實時查詢,用戶可以將應用場景進行模型化,在云端建立應用場景的3D模型,云端根據應用場景的模型數據,對位置信息進行相應的調整,以追求更為精準的位置信息,滿足用戶需求。
小程序界面由以下部分組成:(1)定位界面;(2)地圖設置,可設置縮放比例原點坐標等內容;(3)串口設置;(4)設備連接界面,小程序根據需定位物信息生成專屬二維碼,掃描即可綁定關系;(5)設備參數設置,點擊配置載人即可將界面上的配置寫入設備中;(6)用戶查找界面,輸入點擊開始定位和停止定位按鈕可控制定位的進行與取消;(7)標簽設置,初設置和修改標簽的綁定信息與標定標簽的位置。
5結束語
本文提出的基于UWB的智能標簽系統解決了室內精準定位與精準找物所需要大量耗時和效率低下問題,下位機通過無線通信將數據傳送到Web服務器及各個基站,便于終端訪問數據,利用云平臺將數據反饋到終端顯示器和移動設備上,實現了高精度的定位系統。實驗結果表明,該系統定位尋物所需時間約為傳統定位系統的二分之一,定位精度始終在98.5%以上,具有顯著的優勢。
作者簡介:
潘佳寧(2001—),研究方向:通信工程。
曹會國(1970—),副教授,研究方向:電子檢測與控制技術。
