典型氣動荷載作用下磁浮列車動力學特性研究
2023-07-12 01:12:52南凱威劉夢娟郝占宙吳晗孫振旭
實驗流體力學 2023年3期
南凱威,劉夢娟,郝占宙,吳晗,孫振旭,*
1.中國科學院 力學研究所 流固耦合系統力學重點實驗室,北京 100190
2.中國科學院大學 工程科學學院,北京 100049
0 引 言
作為我國下一代軌道交通工具,高速磁浮列車設計速度達600 km/h,具有安全、可靠、噪聲低、振動小、載客量大等優點。磁浮列車高速運行時,其氣動荷載較低速時顯著增強[1]。為保證高速磁浮列車在強氣動荷載下運行的安全性、穩定性和舒適性,須深入了解磁浮列車氣動荷載的特點,并對氣動荷載作用下磁浮列車的動力學特性進行研究。
磁浮列車底部與傳統軌道列車有較大不同,故其氣動荷載特點明顯區別于后者。目前有關磁浮列車氣動荷載的研究較多。Siclari 等[2]采用計算流體力學(CFD)方法,對布置了5 種不同形狀電磁系統(EMS)列車的氣動力、氣動力矩和表面壓力進行了數值模擬。Tyll 等[3]通過風洞實驗驗證了這些數值模擬的結果。Wells 和Britcher[4]通過風洞實驗,測量了橫風條件下磁浮列車的氣動力和氣動力矩。李人憲等[5]對磁浮列車的氣動阻力和升力進行了數值模擬和分析。畢海權等[6]對磁浮列車的流場和氣動力進行了數值模擬。劉堂紅等[7]比較了幾種不同外形磁浮列車的氣動性能,得到了列車外形與氣動阻力、升力和交會壓力波的關系。許多學者[8-13]還對最新的600 km/h 高速磁浮列車進行了研究,這些研究包括列車在明線和隧道內單車運行和會車場景下的流場、氣動荷載和壓力波特性等。
由于底部結構不同,磁浮列車的動力學特性相比傳統軌道列車也出現了一些新的特點。羅宇豪等[14]研究了磁浮列車的振動傳遞問題,結果表明優化垂向減振器阻尼等懸掛參數能夠較好地抑制車體振動。陸海英等[15]研究了磁浮列車起浮階段的懸浮穩定性問題,發現磁浮列車在彈性軌道梁上起浮時容易發生懸浮失穩的原因是懸浮架與彈性軌道梁發生了共振。劉耀宗等[16]研究了磁浮列車懸浮架的動力學特性,結果表明懸浮架在低頻段具有較好的解耦性能,但在稍高頻段內則存在顯著的耦合作用。趙春霞[17]對高速磁浮列車彎道運行時的導向動力學特性進行了研究。舒瑤等[18]基于CFD 方法,研究了橫風荷載下磁浮列車的動態響應特性。
可以發現,目前對磁浮列車氣動荷載和動力學特性的研究大多側重于其中一個方面,而對氣動荷載作用下磁浮列車動力學特性的研究則相對較少。氣動荷載對列車的穩定性有著重要的影響[19],目前我國正在研發600 km/h 的高速磁浮列車,隨著列車速度的提高,列車系統的穩定性也在發生變化[20]。在600 km/h 的速度下,氣動荷載對磁浮列車的影響非常顯著,特別是當兩車交會時,列車會受到強烈的氣流沖擊。在這樣的氣動荷載和沖擊作用下,列車能否保持懸浮穩定是影響磁浮列車安全性和舒適性的關鍵因素。
本文以上海磁浮示范線上的TR08 型列車為研究對象,采用CFD 方法對明線運行的3 編組列車的頭車、中車和尾車的氣動荷載進行了數值模擬,并對氣動荷載及其成因進行了分析,然后通過SIMPACK和Simulink 進行聯合仿真,建立高速磁浮列車多體結構動力學模型,最后對高速磁浮列車在氣動荷載下的動力學響應進行仿真分析,并對整個列車系統的穩定性進行評估。
1 氣動荷載模擬方法
1.1 磁浮列車模型
如圖1 所示,本研究使用的列車模型為上海磁浮示范線上的3 編組全尺寸TR08 型列車。為滿足計算精度,同時考慮計算的經濟性,該模型上部忽略了車窗、風擋等構件,只保留了列車的主體結構;下部忽略了懸浮磁鐵等構件,但其氣動外形與真實列車保持一致。列車高度H ≈ 3.9 m,總長度為20.0H,寬度為0.9H,其中頭車和尾車外形一致,長度均為6.9H,中間車長度為6.2H。

圖1 TR08 型磁浮列車模型Fig.1 The model of TR08 maglev train
1.2 控制方程
磁浮列車最大設計速度接近600 km/h(即馬赫數Ma ≈ 0.5),因此列車周圍的流動為可壓縮流動。在研究時使用雷諾平均Navier-Stokes(RANS)方程和RNG k-ε 湍流模型。
雷諾平均Navier-Stokes 方程通式可表示為:
式中:ρ為密度;ψ為通用變量;t 為時間;V為速度矢量;Γψ為廣義擴散系數;qψ為廣義源項。
對于連續方程,有:
對于 x方向的動量方程,有:
式中:u為 x方向(即列車運行方向)的速度;μeff為有效黏性系數;p為壓力項。y方向(即展向)、z方向(即豎向)動量方程的表示類似。
對于能量方程,有:
式中:T為溫度;Cp為比熱容;λ為導熱系數;Sh為內熱源。
對于湍動能方程,有:
式中:k 為湍流脈動動能;μ為層流黏性系數;μt為湍流黏性系數;Prk為脈動動能普朗特數;Gk為湍流生成項;ε為耗散率。
對于湍流耗散率方程,有:
式中:Prε為耗散率的普朗特數;C1和 C2為經驗常數;ν為運動黏性系數。
理想氣體狀態方程為:
式中:R為氣體摩爾常數。
控制方程使用有限體積法進行離散,并采用基于壓力的可壓縮求解器和SIMPLE 算法求解壓力-速度耦合方程。對于空間項的離散,使用最小二乘單元計算控制體內的梯度。對流擴散項的離散采用二階迎風格式。時間推進采用一階隱式格式。
1.3 計算域和邊界條件
如圖2(a)所示,整個計算域分為3 個部分:V_IN_P、V_IN_N 和OUTER。V_IN_P 包含的列車沿x+方向運行,V_IN_N 包含的列車沿x-方向運行,OUTER 為外部流場。OUTER 為半徑25 m、長度1 124 m 的半圓柱體,半圓柱體的兩端和側面的邊界條件設置為Pressure-outlet,地面和軌道部分的邊界條件設置為Wall。為了實現滑移網格的相對運動,V_IN_P、V_IN_N 與OUTER 之間的邊界條件設置為Interface,如圖2(b)中黑色線條所示。在2 輛列車開始運動前,為保證列車運行時的流場得到充分發展,2 車車頭的初始距離設置為728 m。2 條平行軌道的間距設置為5.1 m。在會車場景下,為了確保模擬的一致性,列車相向運行的速度(沿x+和x-方向)相同。單車明線運行時(磁浮列車在一條軌道上運行,另一條軌道上沒有列車),使用相同的計算模型和網格進行模擬。
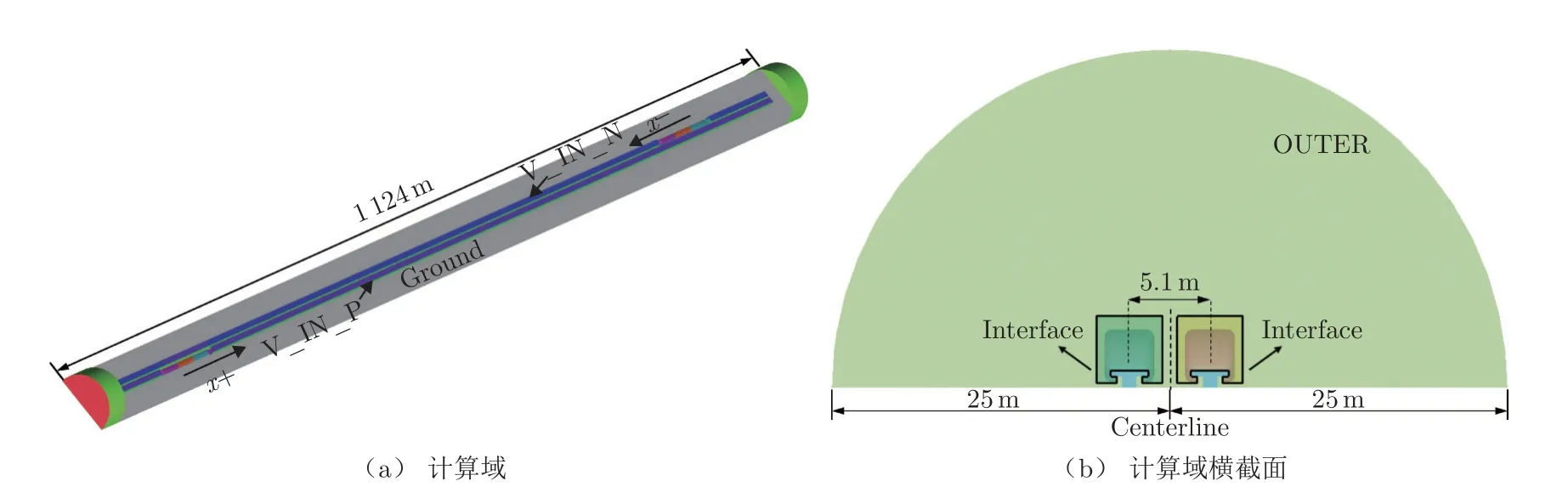
圖2 計算域和邊界條件示意圖Fig.2 Schematic of computational domain and boundary conditions
1.4 網格劃分與獨立性驗證
圖3 展示了滑移網格的布置,在V_IN_P(或V_IN_N)區域包含了2 種網格:車體附近為四面體的非結構網格(Unstructured mesh),車體遠場部分為結構網格(Structured mesh)。非結構網格和結構網格的交界處設置為混合界面(Hybrid surface)。具體網格設置如下:在車體表面設置10 層邊界層,y+的變化范圍為30~100,近壁面第一層網格厚度為0.264 mm,拉伸比為1.2。為驗證所使用網格的獨立性,建立2 種尺寸的非結構網格:粗網格(7.8 ×106個網格單元)和細網格(2.3 × 107個網格單元)。2 種網格計算得到的交會過程中車氣動升力曲線如圖4 所示。從圖中可以看到,基于2 種網格計算得到的氣動升力曲線僅峰值稍有差別。對于更為簡單的單車運行場景,粗細網格計算的氣動升力曲線差別在1%左右。上述結論表明,網格尺寸對計算結果的影響非常有限,但為獲得更為準確的氣動荷載數據,本文使用細網格進行模擬。為提高采用滑移網格方法計算時的收斂性,列車的運動包含了啟動加速和勻速運行2 部分。為了實現啟動加速和勻速運行過程,需編寫一個用戶自定義函數(UDF)來定義磁浮列車的運動。
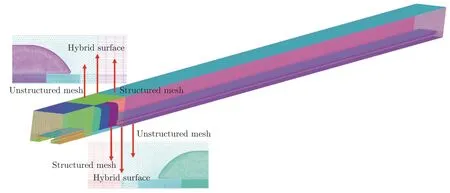
圖3 滑移網格法示意圖Fig.3 Schematic of sliding mesh method
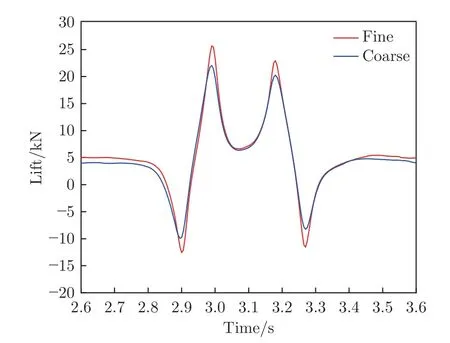
圖4 粗網格和細網格計算的氣動升力比較Fig.4 Comparison of the lift force of coarse mesh and fine mesh
1.5 計算方法驗證
為驗證CFD 方法的有效性,將數值模擬的結果與Li 等[21]2003 年11 月在上海對500 km/h 的磁浮列車進行氣動荷載實驗的結果進行了對比。從圖5(a)中可以看出,列車車門上P 點(測點位置見圖5(b))瞬態壓力曲線有2 個波動過程:列車交會引起的正-負波動(頭波)和負-正波動(尾波)。表1 比較了數值模擬和實驗得到的頭波壓力幅值(ΔpL)、尾波壓力幅值(ΔpT)和列車交會時的壓力均值(ppass),可以看到,數值模擬和實驗結果的相對誤差很小,最大的誤差為3.82%(尾波壓力幅值),驗證了本文所用CFD方法的準確性。
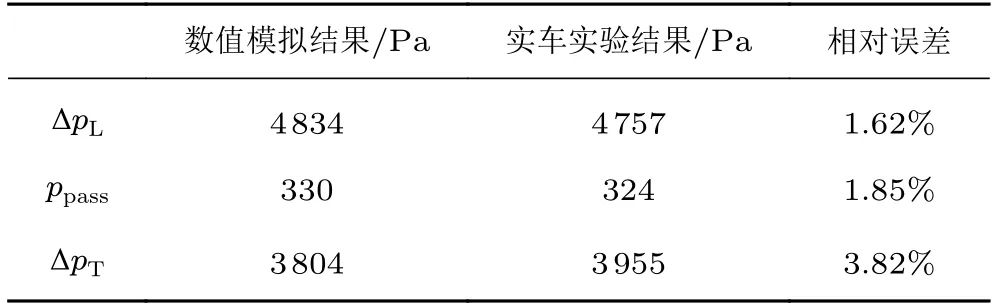
表1 數值模擬與實車實驗壓力對比Table 1 Comparison of pressure
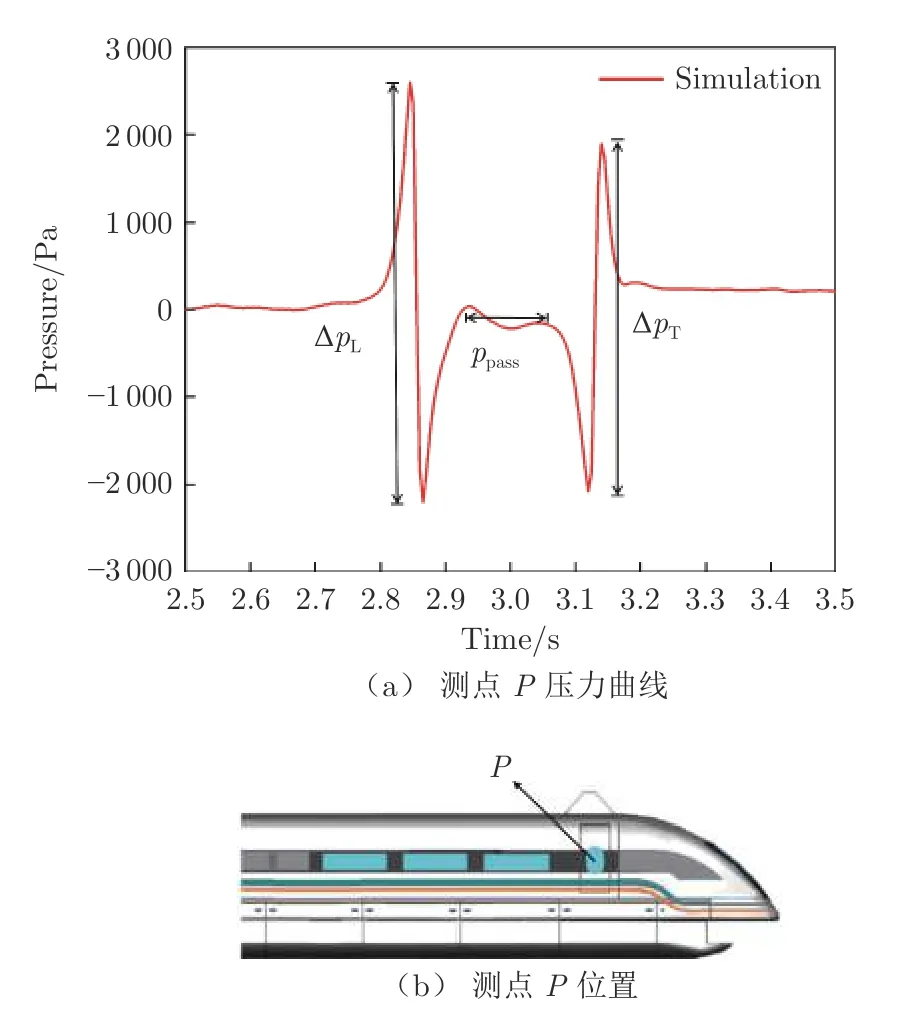
圖5 CFD 方法有效性驗證Fig.5 Verification of the validity of CFD simulation
2 速度對氣動力和氣動力矩的影響
上海磁浮示范線上的TR08 型列車最高運行速度為430 km/h,最高實驗速度為501 km/h。為進一步探究該型列車的氣動性能,圖6~8 給出了單車以300、400、500 和600 km/h 的速度運行時頭車、中車和尾車的氣動力時程曲線。為獲得作用在列車上的真實效果,氣動力和氣動力矩的參考點均選在車廂的質心。可以看到,由于氣流的非定常效應,每條氣動力曲線都會發生振蕩,且振蕩隨著速度的增大而加劇。頭車和尾車都受到方向向上且劇烈振蕩的升力(藍色曲線),這可能會導致列車不穩定,進而誘發嚴重的安全問題,尤其是當列車以500~600 km/h的速度運行時,升力的振蕩變得更為劇烈。與升力相比,側向力(紅色曲線)的振蕩幾乎為0,阻力(黑色曲線)的振蕩也小得多。圖9~11 給出了單車以300、400、500 和600 km/h 的速度運行時頭車、中車和尾車的氣動力矩時程曲線。從圖中可以看到,列車受到的俯仰力矩(紅色曲線)最為顯著,且一直在劇烈振蕩,這主要是由升力振蕩引起的。頭車的俯仰力矩為負值,尾車的俯仰力矩為正值,其原因在于頭車和尾車周圍壓力分布不同。與俯仰力矩相比,滾動力矩(黑色曲線)和偏航力矩(藍色曲線)數值很小,幾乎可以忽略不計。與頭車和尾車相比,中車的氣動力和氣動力矩雖然也會發生振蕩,但其數值較小,對列車的安全運行影響不大。
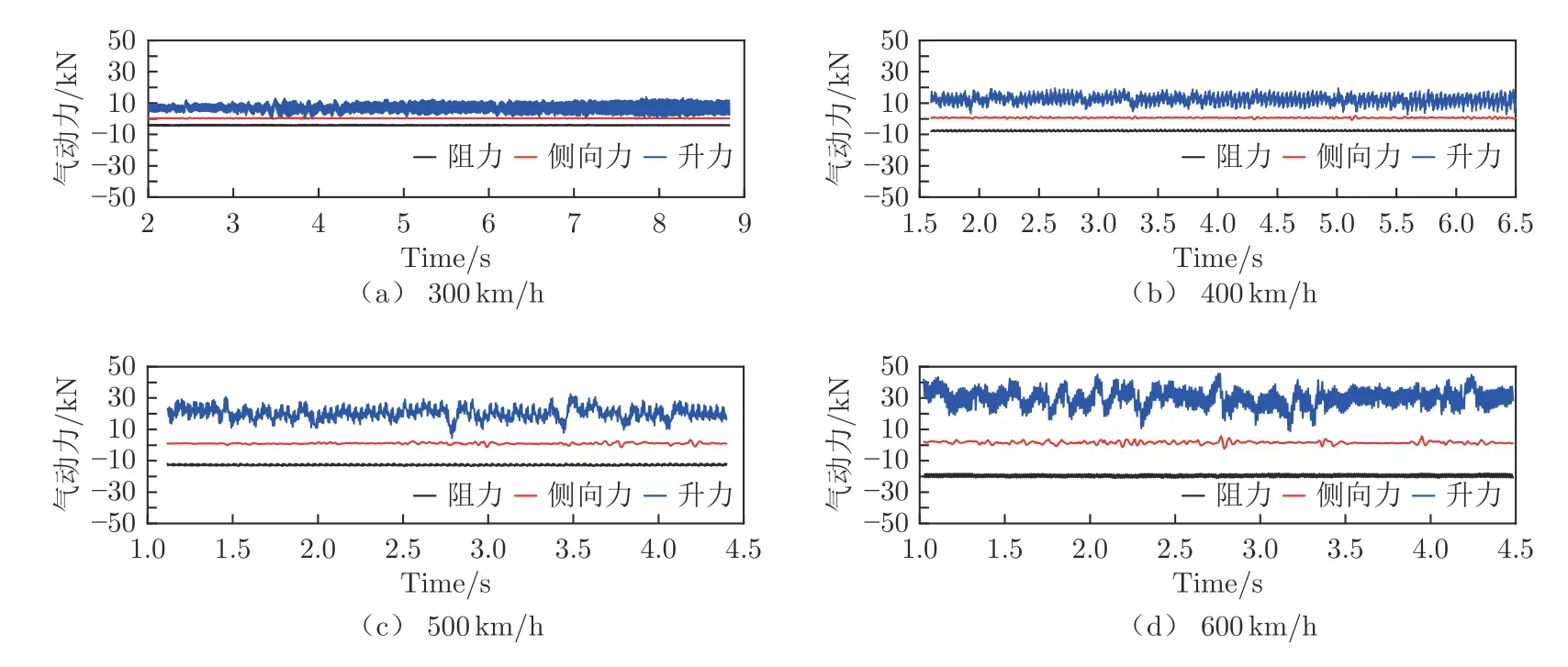
圖6 頭車氣動力時程曲線Fig.6 Histories of aerodynamic forces of the head train
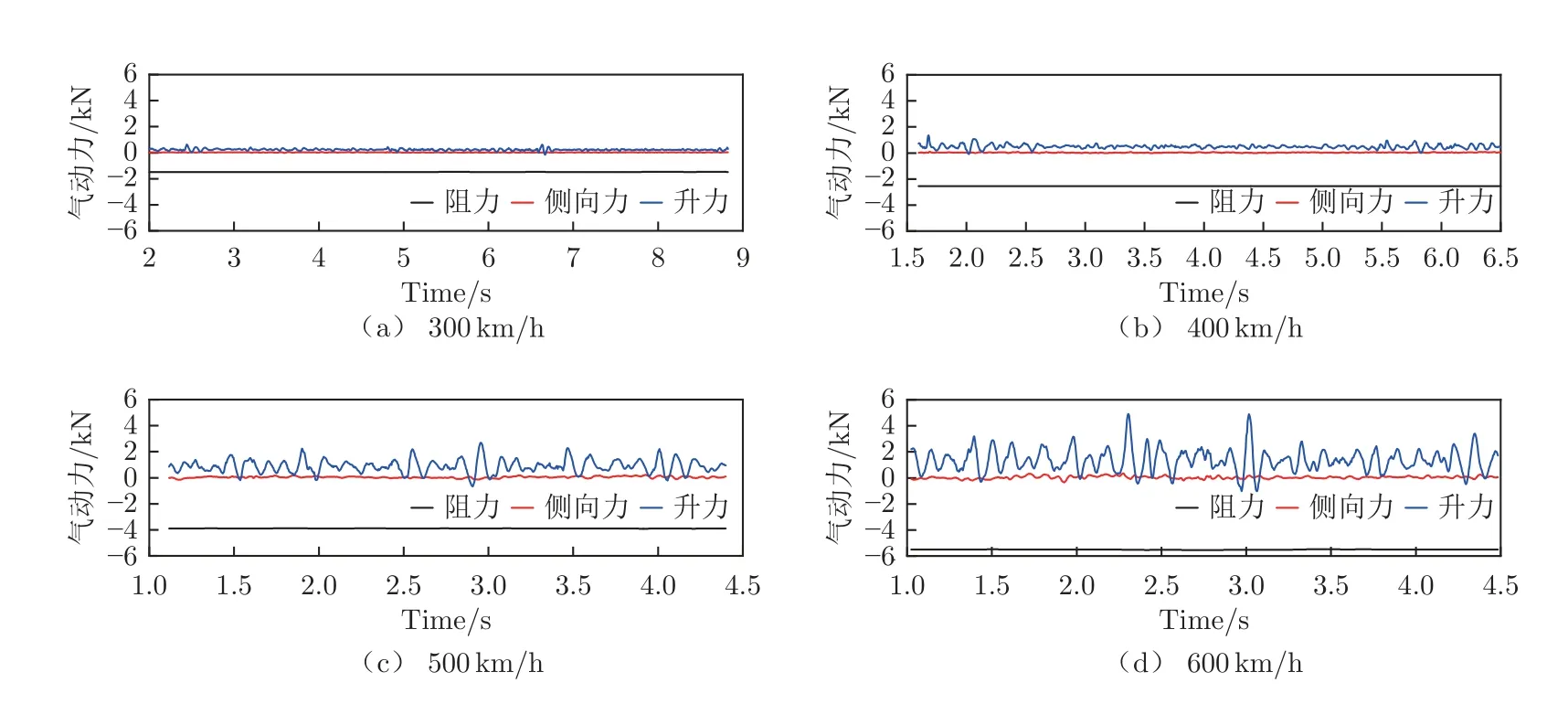
圖7 中車氣動力時程曲線Fig.7 Histories of aerodynamic forces of the middle train
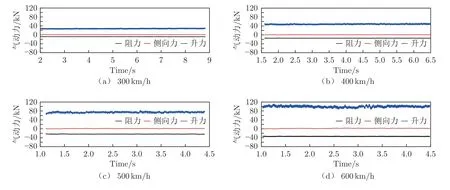
圖8 尾車氣動力時程曲線Fig.8 Histories of aerodynamic forces of the rear train

圖9 頭車氣動力矩時程曲線Fig.9 Histories of aerodynamic moments of the head train
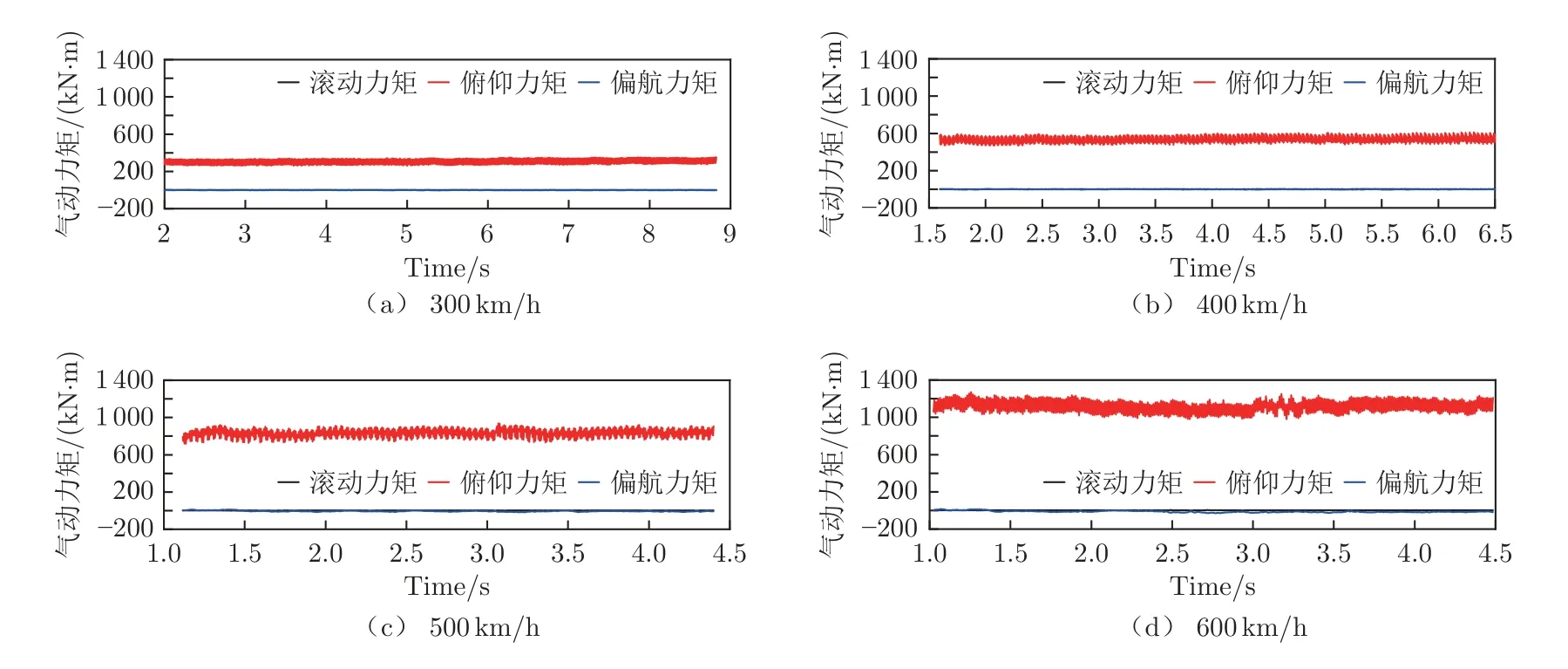
圖11 尾車氣動力矩時程曲線Fig.11 Histories of aerodynamic moments of the rear train
圖12 為單車明線運行時氣動力和氣動力矩時均值隨速度的變化曲線。可以看到,隨著速度的增大,頭車和尾車受到的阻力、升力和俯仰力矩時均值顯著增大;側向力和滾動力矩也在增大,但其數值較小。另外,尾車的偏航力矩和俯仰力矩變化量遠大于頭車,這主要是由于氣流在沿車體發展過程中,非定常效應變得越來越強烈,對車體的影響越來越大。中車兩端分別受到頭車和尾車的約束,故其氣動力和氣動力矩的變化都很小。從圖中還可以看到,在所有速度下,尾車受到的阻力、升力、側向力、俯仰力矩和偏航力矩的絕對值都大于頭車和中車,因此對于3 編組磁浮列車而言,尾車的運行穩定性最差。表2 記錄了氣動力和氣動力矩的具體數值,可以看出,頭車和尾車受到的俯仰力矩的絕對值遠大于滾動力矩和偏航力矩,尾車受到的俯仰力矩也遠超頭車和中車。當列車速度為600 km/h 時,頭車受到的俯仰力矩約為滾動力矩的70 倍、偏航力矩的90 倍,而尾車受到的俯仰力矩約為滾動力矩的550 倍、偏航力矩的90 倍。因此,俯仰力矩是影響磁浮列車安全運行的最重要因素。
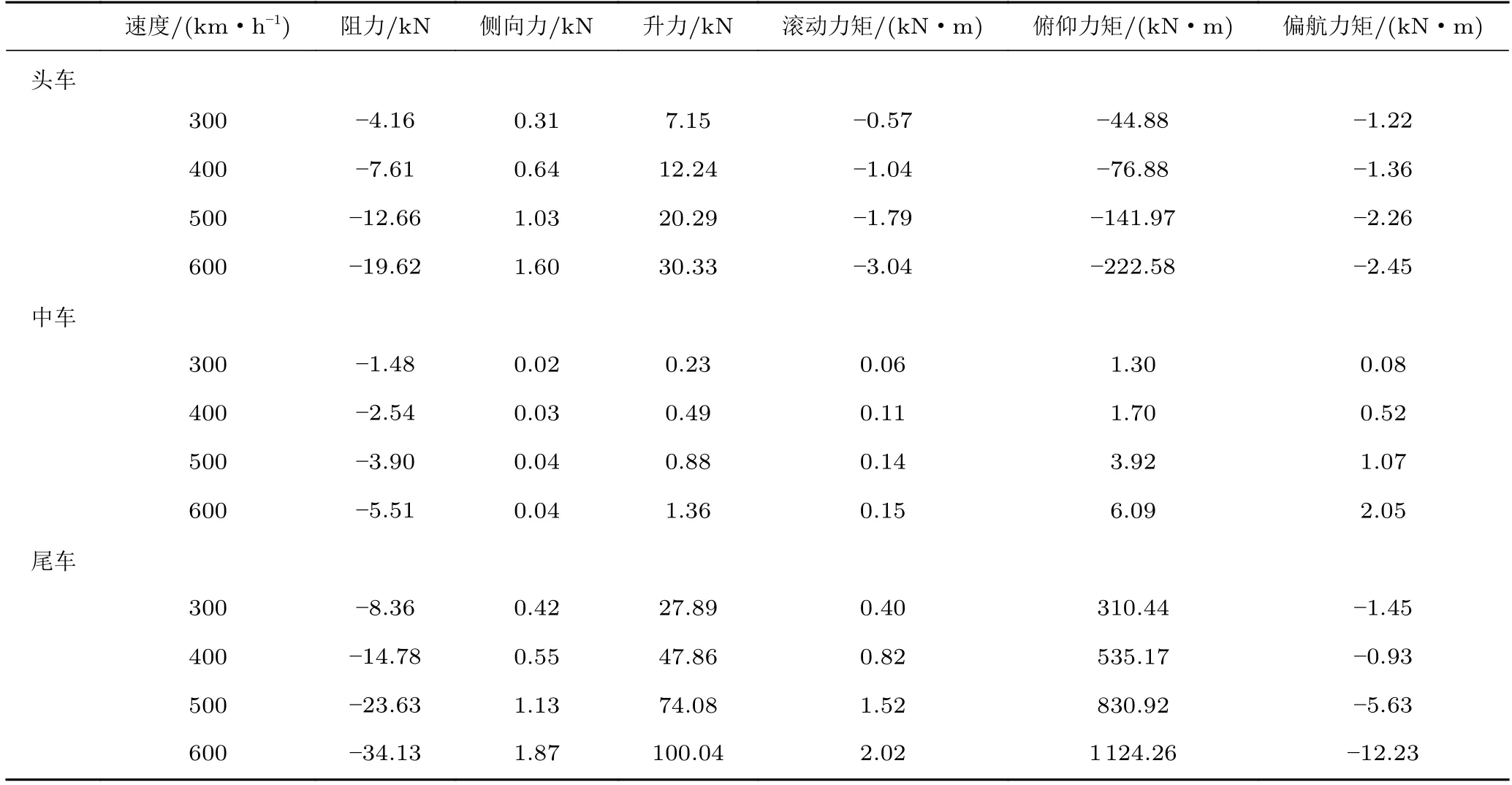
表2 單車運行氣動力和氣動力矩時均值Table 2 Time-averaged values of single maglev train
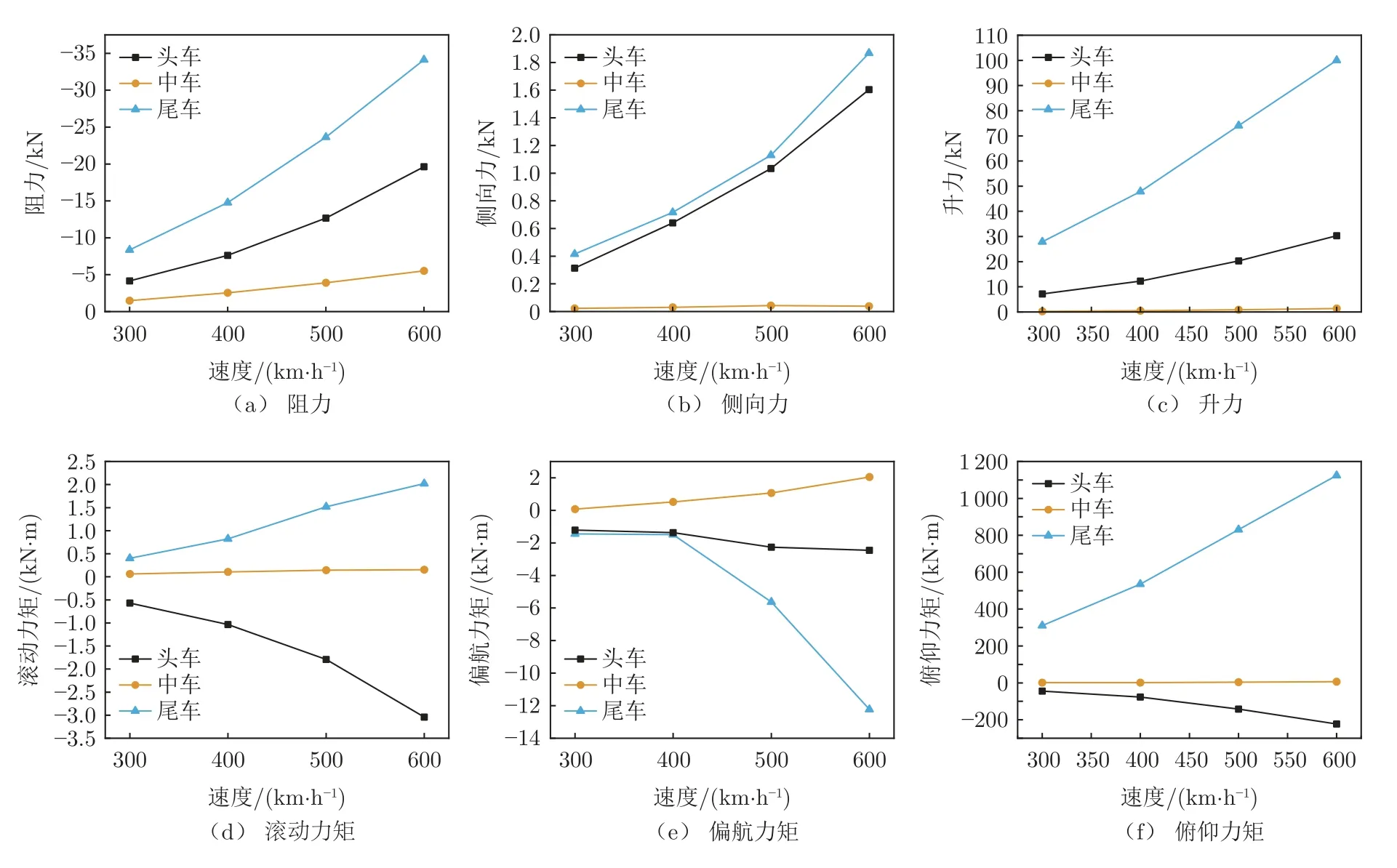
圖12 單車運行氣動力和氣動力矩的時均值Fig.12 Time-averaged values of the aerodynamic forces and moments of single maglev train
圖13 為單車以速度500 km/h 運行時的渦量圖,Q 值(流體速度梯度張量的第二不變量)取50。可以看到,一對流向渦起源于頭車的下部,并從尾車的頂部脫落,其存在會使列車周圍的氣體流速和壓力分布發生變化。由于該流向渦在沿車體發展過程中非定常效應變得越來越強烈,故其對尾車的氣動力和氣動力矩影響更大。
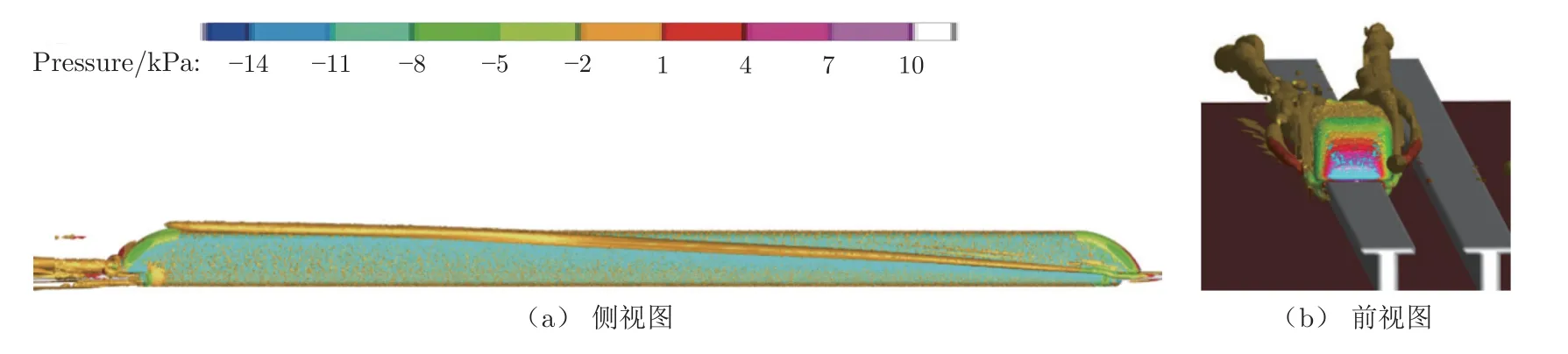
圖13 單車運行時列車周圍渦量圖Fig.13 Vortex distribution of single maglev train
圖14 為單車以速度500 km/h 運行時頭車和尾車周圍的壓力云圖。可以看到,頭車的上下表面均存在一個較大的負壓區,而尾車的上表面為負壓區,下表面為正壓區。頭車上、下表面負壓區對車體的作用力方向相反,二者相互抵消使得頭車的升力和俯仰力矩較小;尾車下表面的正壓區和上表面的負壓區對車體作用力方向相同,二者相互疊加,導致尾車的升力和俯仰力矩較大。
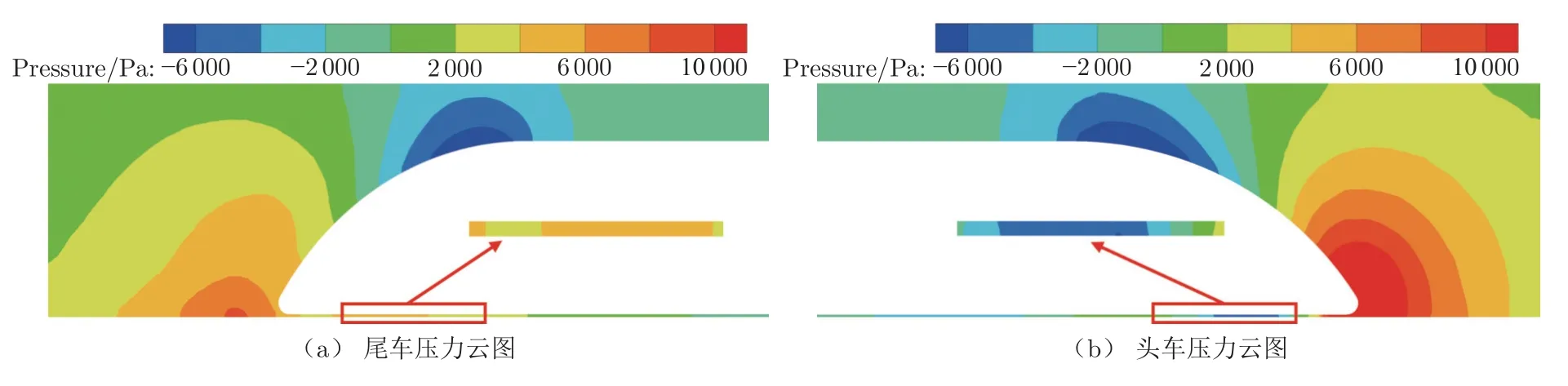
圖14 單車運行時列車周圍壓力分布圖Fig.14 Pressure distribution around single maglev train
采用同樣的計算方法,可以得到列車交會場景下的氣動力和氣動力矩數據。可以預見:在交會前后,當列車之間的距離足夠遠時,所有曲線都類似于單車運行時的氣動力和氣動力矩曲線,而在列車交會過程中,與有效性驗證時測點P 的壓力曲線類似,氣動力和氣動力矩的曲線也會產生2 個波動過程。
3 氣動荷載振蕩來源分析
如前所述,俯仰力矩在單車運行的過程中會出現明顯的振蕩,尤其是頭車(car1)和尾車(car3)。為了找出氣動荷載振蕩的來源,將列車模型分為上下2 部分(圖1)進行研究。每節列車上下部分的俯仰力矩如圖15 所示,其中黑色曲線(PM_car1)和紅色曲線(PM_car1_l)分別代表整節列車和下部結構的俯仰力矩。可以看到:二者振蕩的頻率和波形幾乎相同,而代表上部結構俯仰力矩的藍色曲線(PM_car1_u)相對平滑。這表明整節列車俯仰力矩的振蕩主要是由下部結構引起的。此外,頭車(car1)上部結構俯仰力矩的數值為負,下部結構俯仰力矩的數值為正,二者的相互疊加減小了頭車的俯仰力矩。對尾車(car3)而言,上、下部結構俯仰力矩的數值都為正,二者正向疊加增大了尾車的不穩定性。
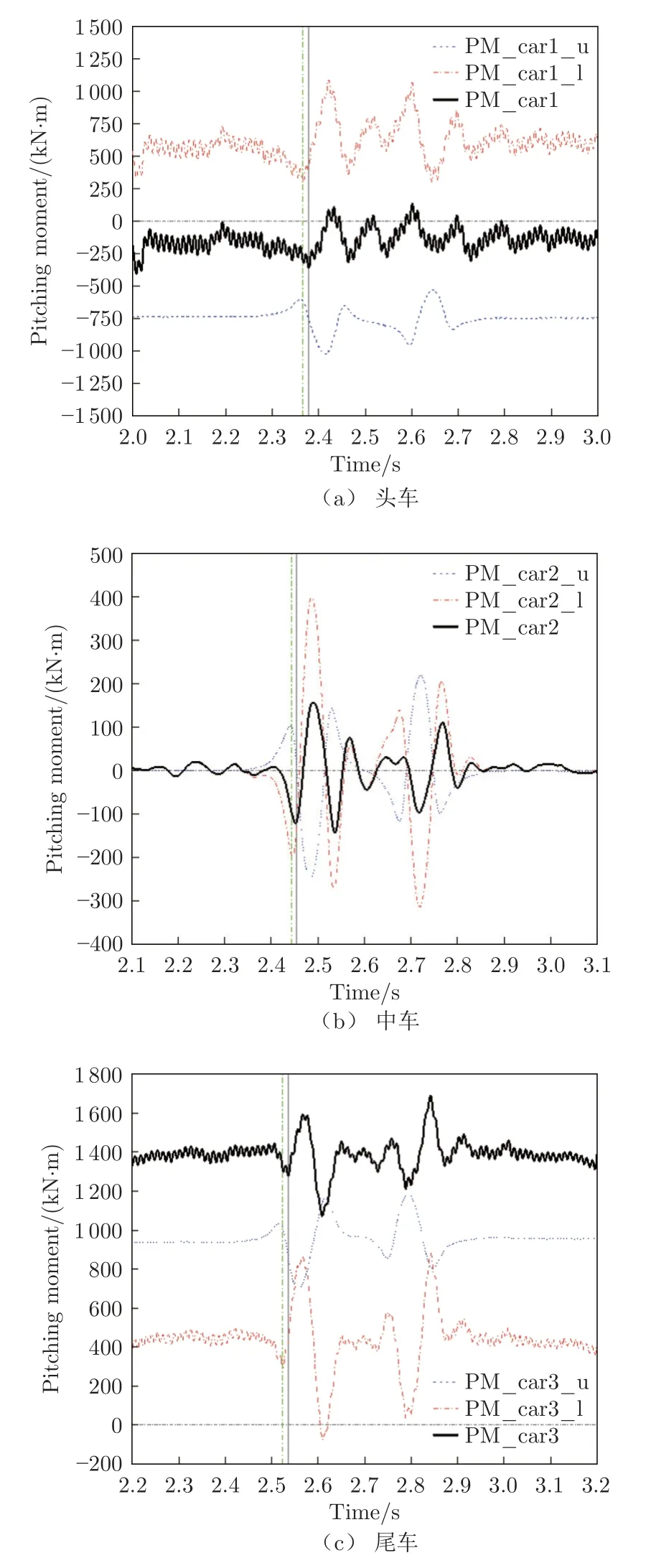
圖15 單節列車上部結構和下部結構俯仰力矩Fig.15 Pitching moment of upper and lower part of each carriage
圖15 中的綠色豎線和灰色豎線分別標出了每節列車上部結構(或下部結構)和整節列車俯仰力矩第一個峰值所在的位置。可以看到,整節列車俯仰力矩峰值出現的位置總是晚于上部結構和下部結構,這是由于上、下部結構俯仰力矩的變化率不同,二者反向耦合導致的。對于偏航力矩,如圖16 所示,上、下2 部分正向耦合,使得偏航力矩曲線的峰值總在同一條豎線上。

圖16 單節列車上部結構和下部結構偏航力矩Fig.16 Yawing moment of upper and lower part of each carriage
4 動力學特性分析
本文所用的磁浮列車動力學模型如圖17 所示。每節列車主要由以下部件組成:車體、4 個懸浮架、8 對可分離式搖臂、8 對吊桿、4 個牽引拉桿、8 對懸浮磁鐵、1 對制動磁鐵、6 對導向磁鐵、8 對空氣彈簧等。懸浮架由2 個C 形梁連接,且中間的縱梁可以發生較大的柔性變形,因此每個懸浮架可以簡化成2 個半懸浮架,由彈性單元連接。磁浮架上布置有A 型空氣彈簧、B 型空氣彈簧、搖臂間的扭轉元件、橫向止擋彈簧,其參數如表3 所示。其他構件則被視為剛體,其柔性變形被忽略。車輛的懸掛結構體現了各向剛度的獨立性:二系懸掛的垂向、橫向和縱向牽引分別由空氣彈簧、吊桿與橫向止擋彈簧、牽引裝置獨立提供;一系懸掛由懸浮磁鐵和導向磁鐵的支承橡膠件或關節結構獨立提供。軌道與車輛通過電磁力進行耦合,懸浮磁鐵磁力通過控制系統進行主動控制,從而實現車輛懸浮。
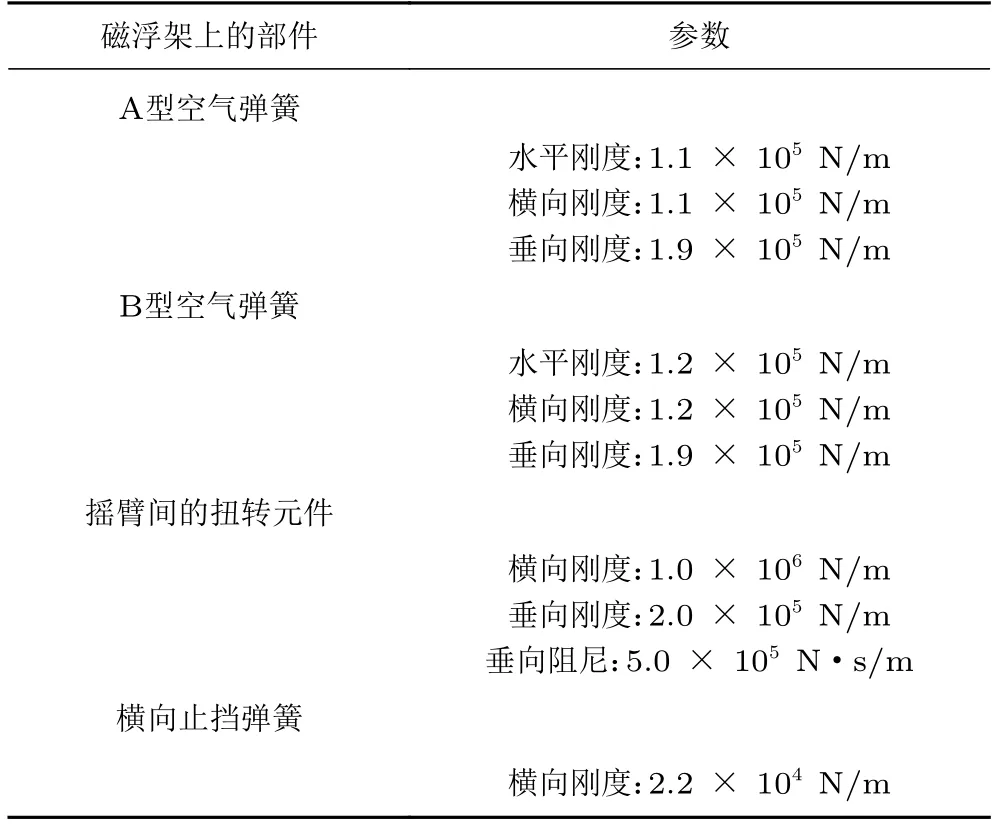
表3 磁浮架上部件的參數Table 3 Parameters of components of the maglev frame
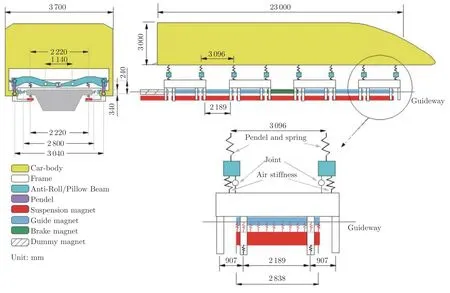
圖17 磁浮列車動力學模型Fig.17 Dynamic model of maglev train
如前所述,計算力矩時的參考點是每節車廂的質心。如果僅在長度為1 124 m 的計算域內進行模擬,只能得到5 s 內的氣動荷載數據。為了更準確地分析磁浮列車單車運行和會車時的動力學特性,特別是列車交會后的振蕩衰減特性,將單車運行和會車時的氣動荷載數據拼接在一起。具體來說,是將單車明線運行的氣動荷載數據拼接在會車的氣動荷載數據之后,即可得到持續數十秒的氣動荷載數據。將上述氣動荷載施加到仿真模型每節車廂的質心上作為車體激勵,開展3 編組磁浮列車在氣動荷載作用下的動力學計算。
4.1 計算方法驗證
由于目前已開展的列車動力學實驗研究較少,本文與文獻[22]的結果進行對比,以驗證動力學計算方法的準確性。如圖18 所示,本文利用SIMPACK軟件建立了與文獻[22]中相同的列車模型,在相同動力學參數、軌道不平順度及運行速度(300 km/h)下,將計算得到的車體豎向位移與文獻[22]中的結果進行了比較。可以看到,本文得到的車體豎向位移曲線與文獻[22]結果的頻率完全一致,僅峰值稍有差別,其原因在于文獻[22]中使用的是自編程序(VTCDP),而本文使用的是SIMPACK建立的列車動力學模型,二者計算原理稍有差別。總體而言,本文計算結果與文獻[22]結果的差異在合理范圍內,計算準確性可信。
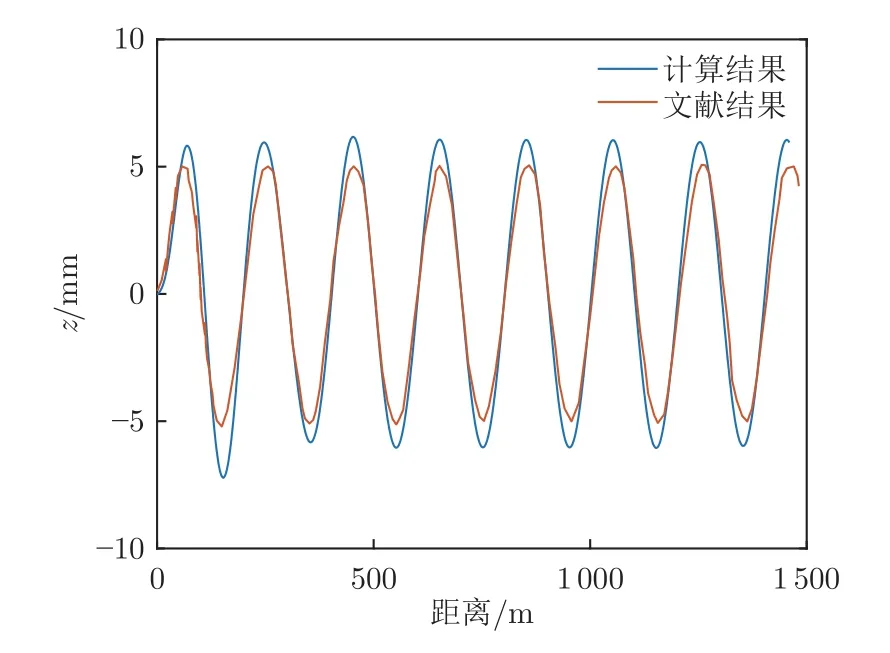
圖18 動力學方法驗證Fig.18 Dynamic model verification
4.2 動力學計算結果分析
根據氣動荷載特性分析的結果,在列車運行尤其是兩車交會過程中,升力和俯仰力矩會發生劇烈振蕩,導致車體發生豎向振動和俯仰振動,若振動幅值過大,將會影響列車的舒適性和安全性。故在動力學計算部分,本文先探究列車交會過程中的車體振動特性。
圖19 和20 分別給出了列車以300、400、500 和600 km/h 的速度交會時車體的豎向振動和俯仰振動時程曲線。可以看到:兩車交會時,各物理量的振蕩幅值明顯大于交會前,且隨著車速的增大,振蕩幅值也逐漸增大。當列車運行速度達到600 km/h 時,幾乎不能保持懸浮穩定,在氣流的強烈沖擊下,交會時會發生失穩。
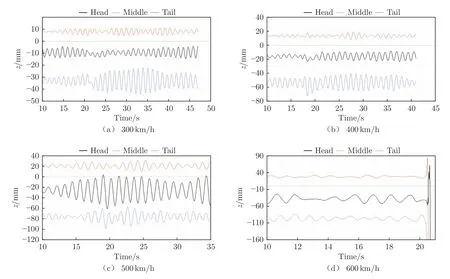
圖19 車體豎向振動曲線Fig.19 Vertical motion of each carriage
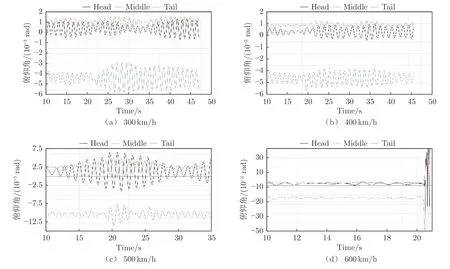
圖20 車體俯仰振動曲線Fig.20 Pitching motion of each carriage
圖21 和22 對比了不同速度下3 節列車的最大豎向振動和俯仰振動幅值。可以看到:隨著速度的增大,車體的振動也在加劇,當單車以600 km/h 的速度運行時,車體的振動幅值已經達到了一個相當大的程度;當兩車以600 km/h 的速度交會時,由于車體振動過于劇烈,列車會發生失穩。此外,在同一速度下,尾車的豎向振動和俯仰振動最為劇烈,頭車次之,中車最小。出現這種現象的原因主要在于氣流在沿著列車發展過程中,非定常效應變得越來越強烈,故尾車受到的擾動最大,而中車兩端受到頭車和尾車約束,振動減小。這與氣動荷載特性的分析結果是對應的。

圖21 每節列車最大豎向振動幅值Fig.21 Maximum vertical motion amplitude of each carriage

圖22 每節列車最大俯仰振動幅值Fig.22 Maximum pitching motion amplitude of each carriage
列車車體的振動會引起懸浮磁鐵間隙發生波動。TR08 型磁浮列車額定懸浮磁鐵間隙為10 mm,列車運行時,若懸浮磁鐵間隙波動幅值較大,會影響列車舒適性和安全性。列車模型懸浮磁鐵的分布如圖23 所示。為了比較不同位置懸浮磁鐵間隙的波動情況,圖24 和25 分別給出了列車明線單車運行和會車場景下不同位置懸浮磁鐵間隙波動的幅值。正常情況下,懸浮磁鐵間隙波動不超過3 mm 是安全的。從圖中可以看到:當車速達到600 km/h 時,即使在單車運行的情況下,T7(字母T、M、H 分別為尾車、中車和頭車的代號,數字則代表該節列車上懸浮磁鐵的編號)位置的懸浮磁鐵間隙波動已經超過4 mm,左側間隙最大可以達到7.5 mm。也就是說,單節TR08 型列車以600 km/h 速度運行時,電磁鐵懸浮架不能保證安全,可能會出現脫軌等危險情況。從圖中還可以看到:由于頭車和尾車車體振動幅值大于中車,其懸浮磁鐵間隙波動幅值也較大,且頭車前端和尾車末端的懸浮磁鐵間隙波動幅值遠大于其他位置,這主要是由于頭車俯仰力矩(負)和尾車俯仰力矩(正)符號相反,這種氣動荷載分布使頭車始終保持頭端向上,尾車始終保持尾端向下,故列車兩端懸浮磁鐵間隙波動幅值較大。當列車以600 km/h 速度交會時,懸浮磁鐵間隙波動幅值遠超10 mm,模型失效,列車發生失穩。不僅如此,即使在500 km/h 的情況下,T7 右側電磁鐵的懸浮磁鐵間隙波動也達到了2.7 mm(圖25(b)),接近安全極限。與單車運行時的情況類似,列車交會時懸浮磁鐵間隙波動幅值分布也是兩端較大。

圖23 懸浮磁鐵分布Fig.23 Distribution of suspension electromagnets
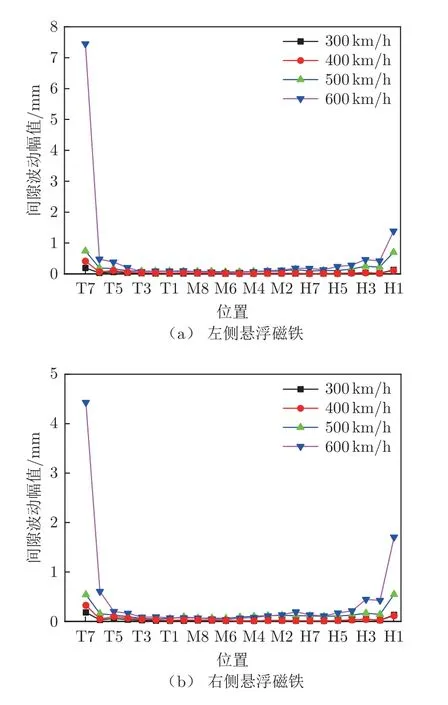
圖24 單車運行時懸浮磁鐵間隙波動幅值Fig.24 Suspension magnet gap fluctuation amplitude(train running)
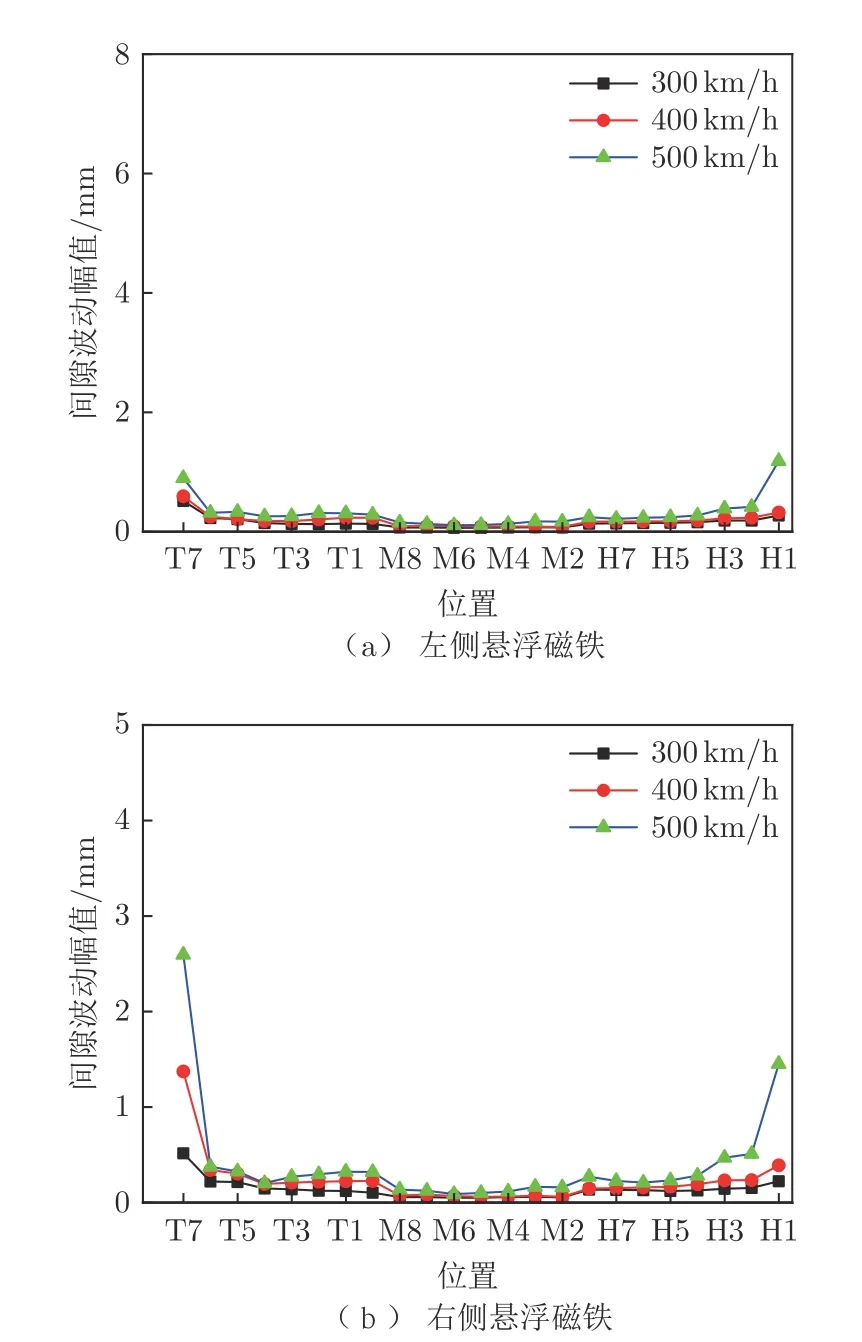
圖25 會車時懸浮磁鐵間隙波動幅值Fig.25 Suspension magnet gap fluctuation amplitude(train meeting)
5 結 論
本文研究了氣動荷載作用下磁浮列車的動力學特性。采用滑移網格法對速度為300~600 km/h 的TR08 型3 編組磁浮列車周圍的流場進行了非定常數值模擬,分析得到了單車運行和會車時的氣動力和氣動力矩的時程曲線,并將每節列車分成上、下結構2 部分,給出了單車運行過程中上、下部結構俯仰力矩和偏航力矩的時程曲線,對整車俯仰力矩的遲滯現象進行了分析。在此基礎上,建立了3 編組列車的動力學與控制聯合仿真模型,通過在模型上施加單車運行和會車的氣動力和氣動力矩,計算得到了每節列車的豎向和俯仰振動幅值及懸浮磁鐵間隙波動。通過分析,得到如下結論:
1)單車運行時,磁浮列車受到的氣動荷載隨速度的增大而增大,且總體呈現尾車 > 頭車 > 中車的規律。俯仰力矩的數值遠大于滾動力矩和偏航力矩,在氣動荷載中占主導地位,是影響列車安全運行的最重要因素。
2)單節列車俯仰力矩峰值出現的位置總是晚于上部結構或下部結構,這是由于上部結構和下部結構的俯仰力矩符號相反、變化率不同,二者反向耦合導致的。對于偏航力矩,上、下部結構的變化率相同,并不會出現整節列車力矩峰值遲滯的現象。
3)列車交會時,車體和懸浮磁鐵間隙的振動幅值遠大于單車運行情況,且隨著列車速度的增大而增大。當TR08 型列車速度達到600 km/h 時,由于氣流強烈的沖擊效應,列車的豎向運動和俯仰運動的振動幅值、懸浮磁鐵間隙將超過安全極限。