利用窄波束實(shí)現(xiàn)反輻射無(wú)人機(jī)攻擊閃爍誘餌研究
2023-07-15 14:00:04楊海峰邊文昆王路瑤
火控雷達(dá)技術(shù) 2023年2期
潘 奎 楊海峰 邊文昆 葉 宏 王路瑤
(1.空軍預(yù)警學(xué)院雷達(dá)士官學(xué)校 武漢 430019;2.中核戰(zhàn)略規(guī)劃研究總院 北京 100048)
0 引言
近幾次局部地區(qū)軍事沖突中,大量無(wú)人機(jī)參戰(zhàn)成為作戰(zhàn)焦點(diǎn),引發(fā)世界各國(guó)對(duì)無(wú)人機(jī)作戰(zhàn)應(yīng)用的關(guān)注[1]。反輻射無(wú)人機(jī)是反輻射武器的一種,是近年來(lái)無(wú)人機(jī)在電磁對(duì)抗領(lǐng)域重點(diǎn)發(fā)展的方向之一[2]。反輻射無(wú)人機(jī)導(dǎo)引頭通常采用平面螺旋天線或曲折臂天線,這兩種天線的波束寬度在頻域范圍內(nèi)達(dá)60°~100°[3]。由于波束較寬,在攻擊密集目標(biāo)或帶有誘餌站的制導(dǎo)雷達(dá)時(shí),不能及時(shí)分辨出雷達(dá)目標(biāo)和干擾誘餌,難以準(zhǔn)確攻擊目標(biāo)。當(dāng)雷達(dá)和誘餌之間的布陣距離適當(dāng),反輻射導(dǎo)引頭不僅不易分辨出雷達(dá)或誘餌,導(dǎo)彈落點(diǎn)對(duì)雷達(dá)和誘餌威脅都比較小,如果誘餌工作在閃爍模式,能達(dá)到顯著的誘偏效果[4-5]。但有源誘偏系統(tǒng)抗反輻射導(dǎo)彈的結(jié)果不僅與各誘餌的布局形式、雷達(dá)和誘餌的功率比有關(guān),ARM速度、機(jī)動(dòng)過(guò)載、分辨角等,也是直接影響誘騙效果的重要因素[6]。因此,窄波束技術(shù)可以減小導(dǎo)引頭分辨角,是對(duì)抗有源誘偏的有效手段[7]。本文綜合考慮無(wú)人機(jī)飛行和反輻射導(dǎo)引頭工作的特點(diǎn),研究波束寬度這個(gè)技術(shù)參數(shù)對(duì)反輻射無(wú)人機(jī)攻擊配閃爍誘餌雷達(dá)陣的影響,為導(dǎo)引頭技術(shù)改進(jìn)提供參考。
1 無(wú)人機(jī)末制導(dǎo)攻擊航跡分析
反輻射無(wú)人機(jī)通常通過(guò)組合導(dǎo)航方式飛至目標(biāo)雷達(dá)區(qū)域上空,為導(dǎo)引頭搜索識(shí)別目標(biāo)雷達(dá)提供合適的作戰(zhàn)距離。確定攻擊目標(biāo)雷達(dá)后,無(wú)人機(jī)進(jìn)入導(dǎo)引頭制導(dǎo),也就是末制導(dǎo)階段過(guò)程,首先導(dǎo)引頭測(cè)向偏差值引導(dǎo)無(wú)人機(jī)調(diào)整機(jī)體對(duì)準(zhǔn)目標(biāo)雷達(dá),然后再根據(jù)俯仰偏差角引導(dǎo)無(wú)人機(jī)俯沖攻擊,末制導(dǎo)攻擊過(guò)程如圖1所示。假設(shè)無(wú)人機(jī)在空間A處,導(dǎo)引頭分辨角為ΔθR,雷達(dá)及誘餌相對(duì)導(dǎo)引頭的張角為Δθ,導(dǎo)引頭天線指向角為β。
圖1 無(wú)人機(jī)末制導(dǎo)攻擊過(guò)程示意圖
當(dāng)Δθ小于ΔθR/2時(shí),導(dǎo)引頭存在目標(biāo)分辨模糊區(qū)域,將無(wú)法分辨出雷達(dá)和誘餌,最終導(dǎo)致無(wú)人機(jī)難以命中任一輻射源。分辨模糊區(qū)S大小為
(1)
考慮雷達(dá)導(dǎo)引頭攻防對(duì)抗場(chǎng)景,隨著無(wú)人機(jī)接近目標(biāo),張角Δθ不斷增大,H減小,分辨模糊區(qū)減小。當(dāng)Δθ大于ΔθR/2時(shí),輻射源將陸續(xù)脫離導(dǎo)引頭視場(chǎng),導(dǎo)引頭將失去對(duì)該輻射源的跟蹤攻擊。如圖2所示,以雷達(dá)配備單誘餌為例,誘餌分離無(wú)人機(jī)攻擊航跡。
圖2 誘餌分離后無(wú)人機(jī)攻擊航跡示意圖
假設(shè)雷達(dá)與誘餌的距離為R,無(wú)人機(jī)橫向過(guò)載為n,俯沖攻擊速度為V。誘餌分離后,無(wú)人機(jī)橫向移動(dòng)的距離與導(dǎo)引頭波速寬度關(guān)系式為
(2)
其中,R1=V2/(ng)。無(wú)人機(jī)橫向移動(dòng)距離與導(dǎo)引頭分辨角關(guān)系如圖3所示。
圖3 無(wú)人機(jī)橫向移動(dòng)距離與導(dǎo)引頭分辨角關(guān)系
當(dāng)雷達(dá)和誘餌距離一定時(shí),導(dǎo)引頭分辨角越小,輻射源分離越早,橫向移動(dòng)距離越大。當(dāng)OD≥R/2時(shí),目標(biāo)分離后,無(wú)人機(jī)能夠繼續(xù)跟蹤輻射源,如圖4所示,曲線與橫軸交點(diǎn)為橫向移動(dòng)距離,可以看出無(wú)人機(jī)橫向移動(dòng)距離隨著分辨角的減小而增大,當(dāng)橫向移動(dòng)距離大于雷達(dá)與誘餌的距離R時(shí),無(wú)人機(jī)飛控系統(tǒng)可以控制實(shí)現(xiàn)對(duì)誘餌的命中。而導(dǎo)引頭分辨角ΔθR≈(0.8~0.9)θ0.5,即取決于導(dǎo)引頭天線的波速寬度。因此,導(dǎo)引頭可以采用窄波束技術(shù)對(duì)抗雷達(dá)誘餌誘偏。
圖4 無(wú)人機(jī)橫向移動(dòng)落點(diǎn)與導(dǎo)引頭分辨角關(guān)系
2 波束約束條件下無(wú)人機(jī)攻擊航線建模
2.1 坐標(biāo)系定義
反輻射無(wú)人機(jī)攻擊配閃爍誘餌的雷達(dá)時(shí),機(jī)體將隨著誘餌閃爍而偏轉(zhuǎn),導(dǎo)引頭指向也將始終跟蹤對(duì)準(zhǔn)目標(biāo)。為了準(zhǔn)確建模仿真,需在大地坐標(biāo)系的基礎(chǔ)上,引入機(jī)體坐標(biāo)系和天線坐標(biāo)系。如圖5所示。
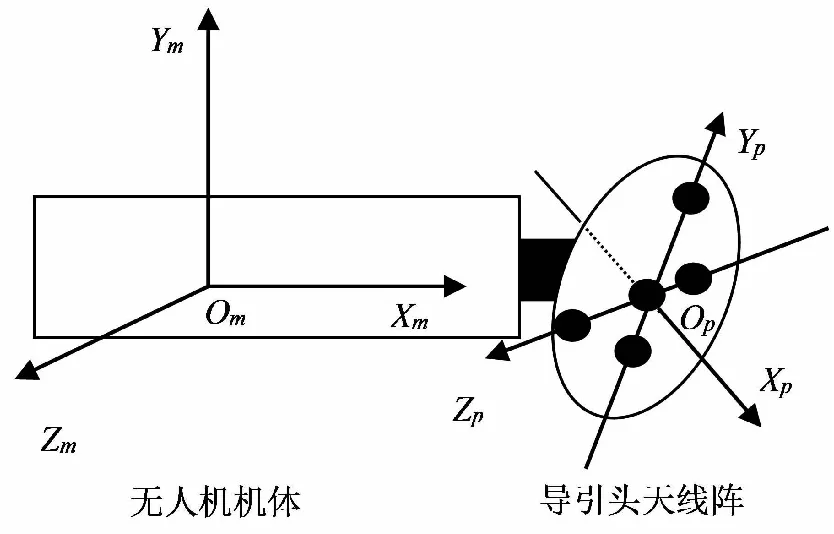
圖5 機(jī)體及導(dǎo)引頭天線坐標(biāo)系
機(jī)體坐標(biāo)系O-XmYmZm:坐標(biāo)原點(diǎn)O取機(jī)體質(zhì)心。OXm軸與ARUAV機(jī)體縱對(duì)稱軸一致,指向頭部為正,OYm軸在機(jī)體縱向?qū)ΨQ面內(nèi),垂直于OXm軸,向上為正,OZm軸垂直于縱向?qū)ΨQ面OXmYm平面,指向右翼,構(gòu)成右手直角坐標(biāo)系,其中在機(jī)體坐標(biāo)系中點(diǎn)的坐標(biāo)表示為:D(m)=[x(m)y(m)z(m)]T。
天線坐標(biāo)系O-XpYpZp:坐標(biāo)原點(diǎn)O取天線陣中心,OYp軸位于俯仰面天線子陣線上,OZp軸位于方位面天線子陣線上,指向長(zhǎng)基線上陣元天線單元為正,OXp軸垂直于天線陣面,向外為正,構(gòu)成右手直角坐標(biāo)系,其中在天線坐標(biāo)系中點(diǎn)的坐標(biāo)表示為:D(p)=[x(p)y(p)z(p)]T。
2.2 導(dǎo)引頭跟蹤模型
無(wú)人機(jī)在調(diào)整姿態(tài)跟蹤攻擊目標(biāo)雷達(dá)過(guò)程中,導(dǎo)引頭天線根據(jù)測(cè)得偏差角,將以ω的偏轉(zhuǎn)角速度調(diào)整導(dǎo)引頭天線指向,使得天線始終對(duì)準(zhǔn)目標(biāo)雷達(dá)。因此,無(wú)人機(jī)視場(chǎng)內(nèi)輻射源數(shù)量,必須考慮天線指向角這個(gè)因素。
經(jīng)過(guò)ΔT時(shí)間,導(dǎo)引頭天線調(diào)整角度為
ΔθP=ωΔT
(3)
k+1時(shí)刻,導(dǎo)引頭天線指向角為
θ(P)(k+1)=θ(P)(k)±ΔθP
(4)

(5)
導(dǎo)引頭天線存在波束分辨角ΔθR限制,雷達(dá)和誘餌脫離天線視場(chǎng)的臨界位置條件為
Δθki=ΔθR/2
(6)
2.3 無(wú)人機(jī)末制導(dǎo)飛行模型[8]
無(wú)人機(jī)根據(jù)導(dǎo)引頭測(cè)得目標(biāo)偏差角調(diào)整姿態(tài)進(jìn)行跟蹤攻擊。在tk導(dǎo)引頭測(cè)得目標(biāo)相對(duì)無(wú)人機(jī)機(jī)體橫向偏差角和縱向偏差角分別為αt和βt,在跟蹤周期ΔT時(shí)間內(nèi),無(wú)人機(jī)橫向調(diào)整位移為
(7)
無(wú)人機(jī)縱向調(diào)整位移為
(8)
其中:R1=V2/(n1g);R2=V2/(n2g)。
反輻射無(wú)人機(jī)要想實(shí)現(xiàn)對(duì)目標(biāo)雷達(dá)的有效攻擊,必須首先截獲目標(biāo)雷達(dá)信號(hào)在跟蹤攻擊雷達(dá)配備誘餌的誘偏場(chǎng)過(guò)程中,當(dāng)Δθki>ΔθR/2時(shí),輻射源脫離天線視場(chǎng),無(wú)人機(jī)將失去對(duì)該目標(biāo)的跟蹤,飛行航線將發(fā)生改變。因此,導(dǎo)引頭制導(dǎo)飛行航線必須考慮飛行姿態(tài)、導(dǎo)引頭天線偏轉(zhuǎn)等對(duì)各輻射源相對(duì)導(dǎo)引頭指向張角的影響,導(dǎo)引頭天線波束寬度這個(gè)因素尤為關(guān)鍵。
3 仿真分析
雷達(dá)誘餌陣參數(shù):雷達(dá)誘餌陣采用菱形布陣方式,相互間距設(shè)置為300m,雷達(dá)與誘餌均在安全范圍之內(nèi)[9]。誘餌工作在閃爍模式,閃爍周期為3s。
無(wú)人機(jī)參數(shù):飛行高度為2500m,飛行速度為80m/s,橫向過(guò)載3,殺傷半徑為30m。
圖7為導(dǎo)引頭波束角分別為60°、40°和20°條件下,無(wú)人機(jī)從垂直于誘餌1、3連線的方向入侵時(shí),導(dǎo)引頭制導(dǎo)攻擊航線;表1為不同波束角條件下,無(wú)人機(jī)分離點(diǎn)和落點(diǎn)位置。

表1 無(wú)人機(jī)分離點(diǎn)和落點(diǎn)與導(dǎo)引頭分辨角關(guān)系
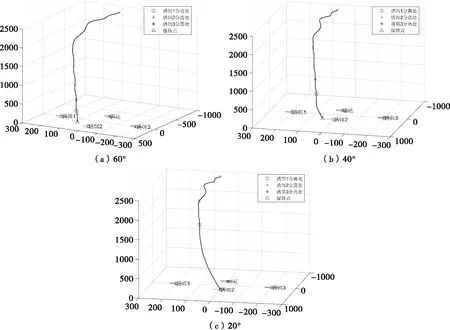
圖7 無(wú)人機(jī)攻擊閃爍誘餌航線
從圖7和表1可以看出:
1)在窄波束約束下,如果目標(biāo)雷達(dá)概略位置已知,反輻射無(wú)人機(jī)仍能完成對(duì)目標(biāo)的跟蹤和俯沖攻擊。
2)無(wú)人機(jī)制導(dǎo)飛行航線是一條來(lái)回?cái)[動(dòng)的曲線,這是因?yàn)樵诙嗾T餌閃爍誘偏下,導(dǎo)引頭測(cè)得的制導(dǎo)角度數(shù)據(jù)不斷跳動(dòng)。
3)在俯沖攻擊過(guò)程中,三誘餌將脫離天線視場(chǎng),脫離點(diǎn)的高度直接影響無(wú)人機(jī)最終落點(diǎn)位置。
4)隨著導(dǎo)引頭天線波束變窄,第一分離點(diǎn)高度增加,無(wú)人機(jī)落點(diǎn)逐漸靠近誘餌2。當(dāng)波束角為20°時(shí),無(wú)人機(jī)落點(diǎn)在殺傷半徑內(nèi),實(shí)現(xiàn)對(duì)誘餌2的摧毀。
因此,多誘餌閃爍誘餌誘偏下,窄波速導(dǎo)引頭可以從空間盡早分離出誘餌,為無(wú)人機(jī)機(jī)動(dòng)提高足夠的高度,進(jìn)而實(shí)現(xiàn)對(duì)誘餌的摧毀。在逐一摧毀誘餌后,最終實(shí)現(xiàn)對(duì)雷達(dá)摧毀。
4 結(jié)束語(yǔ)
為有效對(duì)抗雷達(dá)閃爍誘餌陣,本文在導(dǎo)引頭天線波束視場(chǎng)約束條件下,考慮到天線跟蹤指向?qū)σ晥?chǎng)內(nèi)誘偏場(chǎng)影響,建立了無(wú)人機(jī)導(dǎo)引頭制導(dǎo)飛行模型,在不同波束角下無(wú)人機(jī)對(duì)雷達(dá)配3部閃爍誘餌的攻擊效果進(jìn)行仿真分析。結(jié)果表明,使用窄波束導(dǎo)引頭可以實(shí)現(xiàn)無(wú)人機(jī)對(duì)雷達(dá)配備閃爍誘餌陣實(shí)施有效攻擊。
