全數(shù)字式旋轉(zhuǎn)變壓器的解碼設(shè)計(jì)
2023-07-15 14:00:12胡衛(wèi)鵬
火控雷達(dá)技術(shù) 2023年2期
胡衛(wèi)鵬 劉 峰 王 軒
(西安電子工程研究所 西安 710100)
0 引言
角度傳感系統(tǒng)的測(cè)量精度和響應(yīng)速度直接影響到伺服系統(tǒng)的運(yùn)動(dòng)控制精度。在某些工作環(huán)境惡劣的場(chǎng)合,如具有高沖擊震動(dòng)、低溫、濕熱的條件下,旋轉(zhuǎn)變壓器(簡(jiǎn)稱旋變)被廣泛地應(yīng)用于角度傳感系統(tǒng)中,軍用領(lǐng)域絕大多數(shù)伺服系統(tǒng)也都使用旋轉(zhuǎn)變壓器作為角度測(cè)量傳感器[5]。
在激磁繞組輸入恒定的正弦電壓 Uref ,當(dāng)單通道旋變的轉(zhuǎn)子旋轉(zhuǎn)時(shí),在定子繞組就會(huì)感應(yīng)輸出兩組隨轉(zhuǎn)子角位置不同而相對(duì)變化的正余弦電壓 Us_sin,Us_cos。軸角-數(shù)字轉(zhuǎn)換器(RDC)就是將旋變輸出的模擬信號(hào)轉(zhuǎn)換成角位置的數(shù)字信號(hào)。而角度傳感系統(tǒng)的精度主要取決于旋轉(zhuǎn)變壓器的精度和軸角-數(shù)字轉(zhuǎn)換器(簡(jiǎn)稱RDC)的精度,因此RDC的性能對(duì)于角度傳感系統(tǒng)的精度至關(guān)重要。
軸角數(shù)字轉(zhuǎn)換通常使用集成的專用RDC芯片(或模塊),另一種是全數(shù)字式解碼方式,即直接將旋變信號(hào)進(jìn)行A/D轉(zhuǎn)換后,通過(guò)處理器軟件算法實(shí)現(xiàn)角位置解碼。RDC芯片不僅要占據(jù)一定的體積,且價(jià)格昂貴;在某些對(duì)體積、重量限制嚴(yán)格的場(chǎng)合(如機(jī)載和彈載雷達(dá)),全數(shù)字式解碼方式可以滿足體積小、低成本的要求,而且還可以用軟件的方式來(lái)降低系統(tǒng)的非線性誤差。
1 基礎(chǔ)理論
旋轉(zhuǎn)變壓器的原理如同一個(gè)變壓器,轉(zhuǎn)子為原邊,定子為副邊。圖1 為一個(gè)單通道旋變?cè)韴D。E1、E2為轉(zhuǎn)子繞組,可以將激磁信號(hào)輸入至激磁繞組;S1、S2是正弦定子繞組,C1、C2是余弦定子繞組[2]。
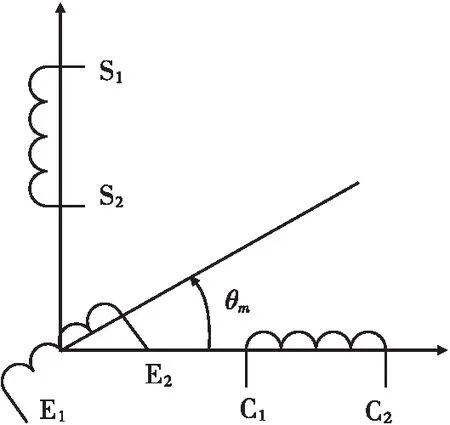
圖1 旋轉(zhuǎn)變壓器原理簡(jiǎn)圖
設(shè)激磁信號(hào)為
Ve=Umcos(ωet)
(1)
當(dāng)激磁正弦波信號(hào)輸入至轉(zhuǎn)子繞組后,在定子繞組上會(huì)感應(yīng)出兩組正交的正、余弦電壓信號(hào),它們是激磁信號(hào)在機(jī)械角度θm的調(diào)制生成的:
(2)
其中:k——轉(zhuǎn)子匝數(shù)/定子匝數(shù);
Um——激磁信號(hào)的幅值;
θm——旋轉(zhuǎn)變壓器的角位置;
ωe——激磁信號(hào)的角頻率。
如果旋轉(zhuǎn)變壓器角速度ωe與激磁信號(hào)的角頻率dθm/dt相比足夠小,第二項(xiàng)的影響可以被忽略(通常激磁信號(hào)的角頻率dθm/dt=2000~10000Hz,雷達(dá)轉(zhuǎn)臺(tái)一般ωe<1000rps,fe=ωe/2π=159Hz)。
因此忽略第二項(xiàng)后得到[3]:
VS=kUmsinθmcos(ωet)
VC=kUmcosθmcos(ωet)
(3)
即正余弦輸出信號(hào)的幅值對(duì)應(yīng)了轉(zhuǎn)子的角位置,對(duì)應(yīng)關(guān)系見圖2所示,因此可以對(duì)正余弦信號(hào)進(jìn)行解調(diào)來(lái)計(jì)算出角位置[1]。
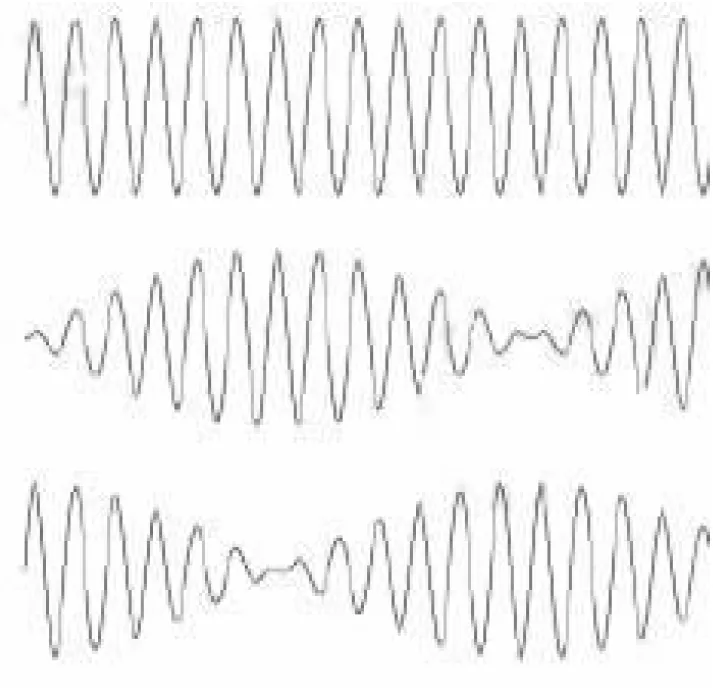
圖2 激磁信號(hào)(上)與輸出信號(hào)sin(中)、cos(下)對(duì)應(yīng)關(guān)系圖
2 算法設(shè)計(jì)
本文采用反正切法作為角度信號(hào)解算算法。反正切法是直接對(duì)正、余弦輸出電壓信號(hào)進(jìn)行采樣,它們的比值就是對(duì)應(yīng)角度的正切值,再對(duì)此值用四象限反正切函數(shù)解算即得到角位置值[6]。此算法原理簡(jiǎn)單,角度測(cè)量實(shí)時(shí)性高。
3 電路硬件實(shí)現(xiàn)
全數(shù)字 RDC的硬件電路相對(duì)簡(jiǎn)單,主要功能是由軟件算法實(shí)現(xiàn),但是為了驗(yàn)證其功能及性能,板上也設(shè)計(jì)了 RDC 芯片-RD19230的硬件電路。本系統(tǒng)選擇處理器是湖南進(jìn)芯電子科技有限公司自主研發(fā)的DSP數(shù)字處理芯片AVP32F335QP176S,它的最高運(yùn)行頻率是 150MHz,外圍接口豐富。AD采樣選用DSP的片上AD,通信電路將DSP讀取的角度值發(fā)送到上位機(jī),方便數(shù)據(jù)保存和分析。系統(tǒng)硬件組成見圖3所示。
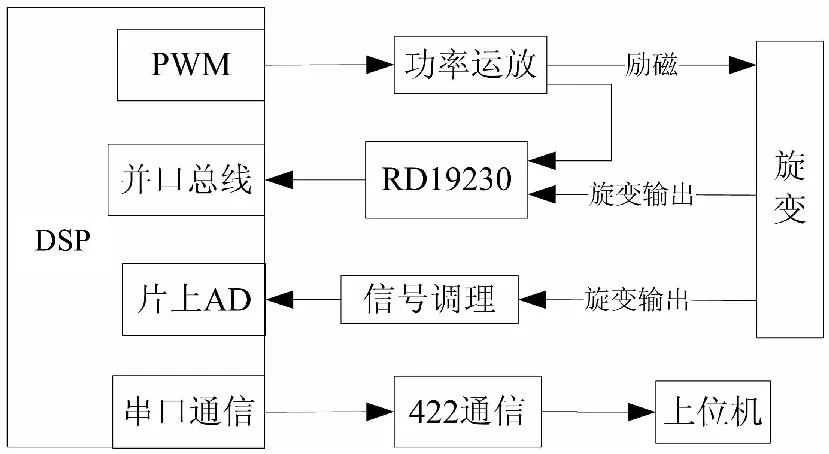
圖3 系統(tǒng)硬件框圖
DSP片上AD采樣范圍為0~3V,需將將旋轉(zhuǎn)變壓器的激磁、SIN/COS輸出信號(hào)調(diào)制到AD采樣范圍內(nèi),SIN/COS輸出信號(hào)的零位電壓調(diào)制到AD的中點(diǎn)1.5V,1.5V基準(zhǔn)電壓產(chǎn)生電路見圖4所示。

圖4 1.5V基準(zhǔn)電壓產(chǎn)生電路
DSP產(chǎn)生一路互補(bǔ)SPWM信號(hào),該信號(hào)經(jīng)過(guò)差分放大、二階濾波和功率放大后,做為旋變的激勵(lì)信號(hào),并輸入至RD19230;同時(shí)此信號(hào)還要經(jīng)過(guò)調(diào)理后輸入至DSP片上AD。激磁產(chǎn)生電路見圖5所示。

圖5 激磁產(chǎn)生電路
為提高采樣精度,將旋轉(zhuǎn)變壓器的激磁、SIN/COS輸出信號(hào)采用過(guò)采樣。AD采樣周期為2μs,16路片上AD順序采樣,定時(shí)中斷執(zhí)行。每個(gè)周期旋轉(zhuǎn)變壓器的SIN和COS輸出信號(hào)在DSP內(nèi)部6倍過(guò)采樣,旋轉(zhuǎn)變壓器的激磁信號(hào)2倍過(guò)采樣。DSP片上AD電路見圖6所示。

圖6 DSP片上AD電路圖
為進(jìn)行對(duì)比實(shí)驗(yàn),DSP需讀取RD19230的旋變解調(diào)值,具體硬件電路見圖7所示[4]。

圖7 RD19230的硬件電路圖
4 電路軟件實(shí)現(xiàn)
4.1 激磁信號(hào)的產(chǎn)生
SPWM波由DSP的EPWM單元實(shí)現(xiàn),軟件建立正弦波的半周期數(shù)組,單元數(shù)為50個(gè)。基波頻率為100kHz,這樣,輸出載波頻率為2kHz。
4.2 全數(shù)字 RDC軟件實(shí)現(xiàn)

5 實(shí)驗(yàn)結(jié)果
實(shí)驗(yàn)采用單通道旋變作為測(cè)角對(duì)象,旋變激磁輸入波形如圖8所示,旋變定子SIN輸出波形如圖9所示。由圖8和圖9可知,系統(tǒng)輸出的激磁波形平整、畸變小,且激磁頻率為2kHz。
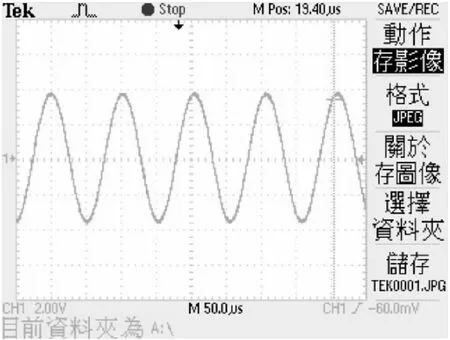
圖8 激磁輸入波形

圖9 旋變粗機(jī)SIN輸出波形
對(duì)旋變定子的輸出信號(hào)進(jìn)行全數(shù)字式軸角-數(shù)字轉(zhuǎn)換,將其所得結(jié)果與軸角轉(zhuǎn)換芯片 RD19230硬件轉(zhuǎn)換結(jié)果進(jìn)行對(duì)比。其中RD19230分辨率為14位, 雖然DSP片上AD的分辨率為為12位,但信號(hào)經(jīng)過(guò)了6倍過(guò)采樣,實(shí)際分辨率已大于14位。
表1為旋變測(cè)角系統(tǒng)的實(shí)測(cè)數(shù)據(jù),可以看出全數(shù)字RDC角度與RD19230的角度讀數(shù)的誤差控制在0.03°以內(nèi),可以滿足一般系統(tǒng)需要,精度較高。

表1 實(shí)驗(yàn)測(cè)角數(shù)據(jù)
6 結(jié)束語(yǔ)
本設(shè)計(jì)根據(jù)理論分析,搭建了基于DSP的全數(shù)字軸角-數(shù)字轉(zhuǎn)換的軟、硬件平臺(tái),將復(fù)雜硬件用軟件來(lái)實(shí)現(xiàn),不僅節(jié)省空間、節(jié)約成本,而且對(duì)于非理想的旋變信號(hào)還可以設(shè)計(jì)靈活的誤差消除算法,從而提高了系統(tǒng)的穩(wěn)定性。實(shí)驗(yàn)結(jié)果證實(shí)了本文所研究的全數(shù)字RDC算法可以應(yīng)用于某些小體積(如機(jī)載、彈載雷達(dá)系統(tǒng)),中低轉(zhuǎn)速的測(cè)角場(chǎng)合。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
中學(xué)生數(shù)理化(高中版.高考理化)(2020年11期)2020-12-14 07:36:08
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
中國(guó)生殖健康(2019年3期)2019-02-01 06:12:26
通信電源技術(shù)(2018年3期)2018-06-26 06:33:30
現(xiàn)代工業(yè)經(jīng)濟(jì)和信息化(2016年4期)2016-05-17 05:35:38
通信電源技術(shù)(2016年3期)2016-03-26 07:13:46
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
海軍航空大學(xué)學(xué)報(bào)(2015年3期)2015-11-11 17:20:00
電測(cè)與儀表(2014年12期)2014-04-04 12:10:16
