高機動雷達雙級液壓缸運動過程仿真分析
2023-07-15 14:00:12鄒玉蓉劉浩亮耿少航
火控雷達技術 2023年2期
關鍵詞:系統
鄒玉蓉 李 智 劉浩亮 李 博 耿少航
(西安電子工程研究所 西安 710100 )
0 引言
現代化戰爭對地面高機動雷達的機動性和陣地適應性能力提出了越來越高的要求[1],液壓系統作為高機動雷達的核心部件之一,具有結構緊湊和承載能力大等優點,能實現大型天線迅速地架設與撤收,在高機動雷達中得到了廣泛的應用。
某高架機動雷達通過液壓系統雙級液壓缸實現天線垂直舉升,雙級液壓缸完全伸出時可將天線架設至13m高空,然而在天線架設過程中,往往伴有噪音和振動等安全隱患。現有研究表明,在多級液壓缸換級過程中由于壓力突變會引發振動等現象,各行業學者對此現象展開了一系列的研究。王增全[2]等為了解決多級起豎液壓缸在發射架快速回收過程換級時會產生較大的沖擊振動這一問題,研制了液壓缸節流緩沖裝置,基于某型號多級起豎液壓缸建立機械液壓聯合仿真模型,通過與試驗數據的對比驗證了該仿真方法的正確性。謝建[3]等建立了雙級液壓缸起豎系統模型,并利用Simulink設計了控制策略對起豎系統模型進行了仿真,從而有效地減弱了起豎系統的振動。 彭國朋[4]等針對雷達天線塔架液壓升降系統的油缸抖動現象,提出了一種新式液壓平衡回路對問題系統進行改進,試驗和仿真結果表明該措施提高了液壓升降系統的運動平穩性,改善了雷達的架設和撤收性能。 鄧飆[5]等對伸縮缸換級過程的速度、加速度進行分析,設計了利用多項式插值的換級速度曲線,通過對舉升液壓回路AMESim模型的仿真分析和控制系統的仿真研究,從而實現大型液壓舉升系統的過程控制,且減小振動沖擊。孫輝[6]等針對增壓系統工作時不能滿足性能穩定的問題,設計出復合柱塞缸和非對稱液壓缸的單作用增壓系統,以位移為控制量,外負載力為干擾量進行模型分析,推導出系統總的傳遞函數,隨后依據相關參數對增壓系統進行Simulink仿真結果表明,增壓系統性能穩定。
綜上所述, 現階段各個領域的學者通過理論分析、仿真和試驗等方法已經對多級液壓缸緩沖、控制策略等問題進行了一系列研究。本文借助AMEsim商業軟件,對某高機動雷達液壓系統雙級缸運動過程進行仿真分析,提出某高機動雷達液壓系統雙級液壓缸運動過程流量控制策略,能夠為高機動雷達液壓系統設計提供依據,具有明確的現實價值和工程意義。
1 液壓系統模型
1.1 系統原理
圖1所示的是某高機動雷達液壓系統原理圖,該系統由液壓油源1、電機2、液壓泵3、換向閥4、平衡閥5、雙級液壓缸6和負載7組成。本文根據圖1所示的液壓系統原理圖,在AMEsim商業軟件中建立了如圖2所示的液壓系統仿真模型,為了提高計算效率,本文只取一條液壓缸進行分析,同時將電機、液壓泵和液壓油源統一簡化為理想流量源。
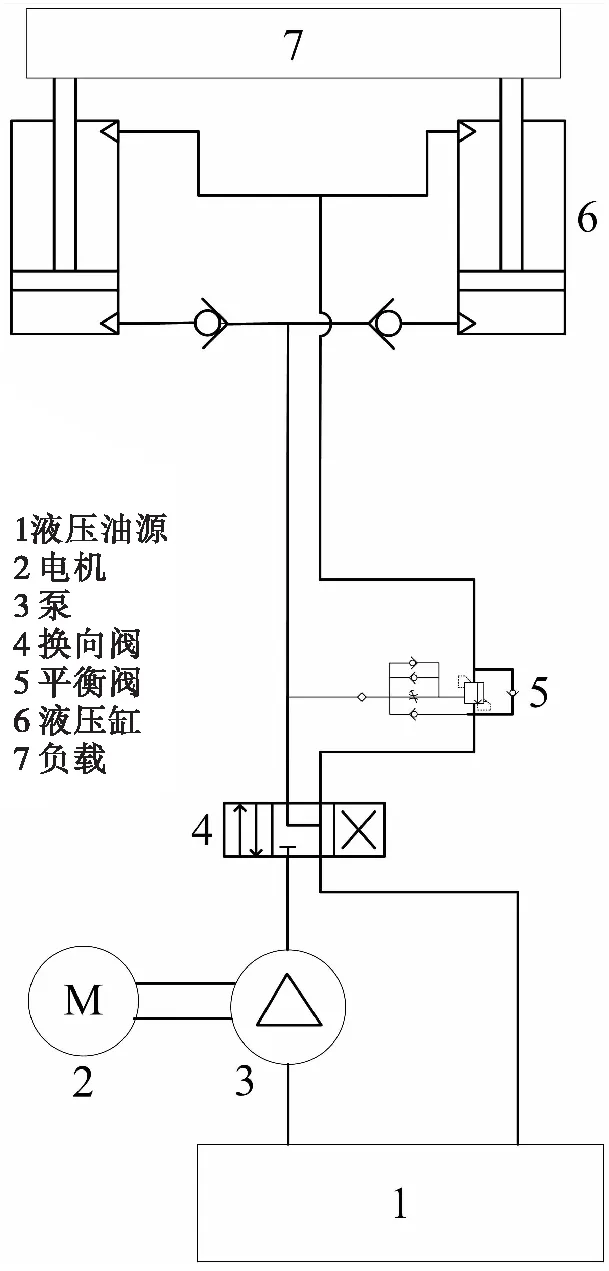
圖1 液壓系統原理
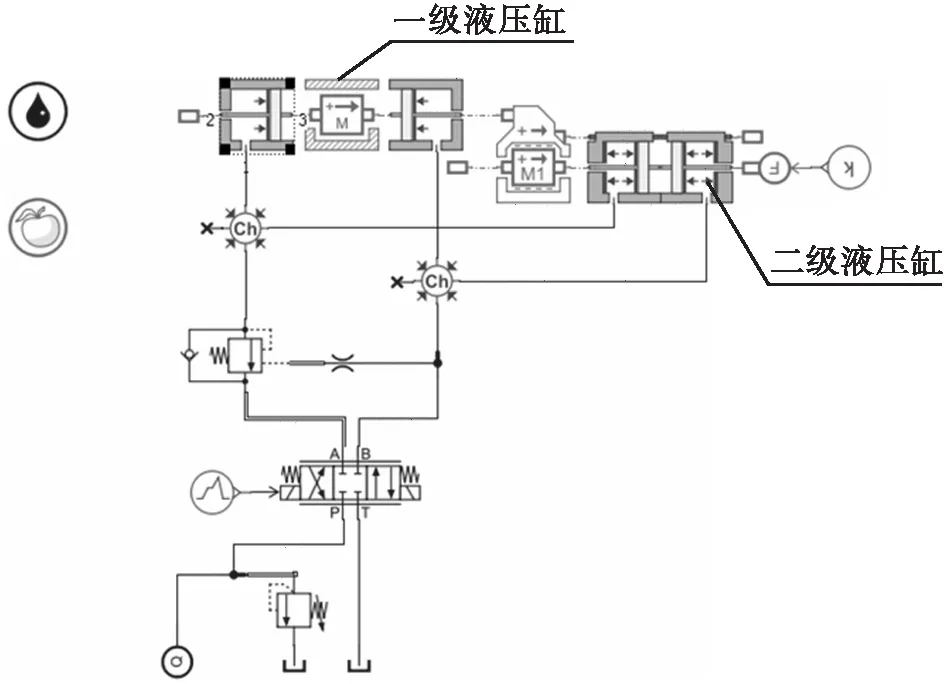
圖2 仿真模型原理圖
1.2 雙級液壓缸
雙級液壓缸的特點是工作行程可以很長而完全收縮時很短。當進油時,一級活塞首先運動,一級活塞完全伸出時二級活塞運動;縮回時則順序相反。如圖3所示,一級液壓缸作用面積滿足:
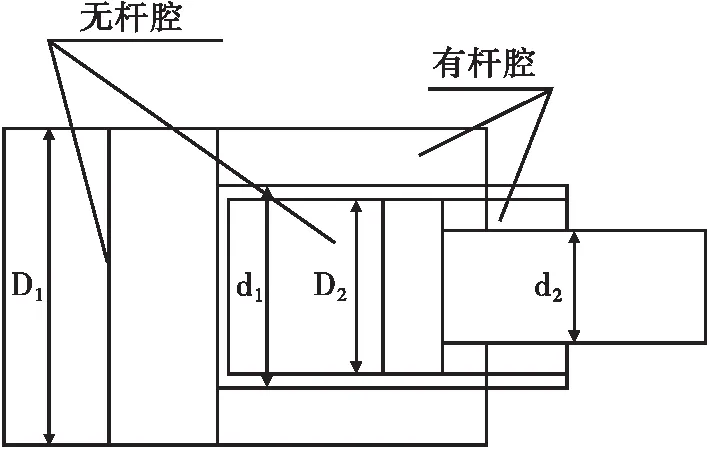
圖3 雙級液壓缸原理
(1)
二級液壓缸作用面積滿足:
(2)
由式(1)和式(2)可知,當一級液壓缸完全伸出切換為二級液壓缸時,活塞作用面積變小系統壓力增大,從而引發沖擊與振動現象。
雙級液壓缸的參數如表1所示,除此之外,系統負載的質量保持2000kg不變;活塞桿伸出過程中系統流量保持12L/min,活塞桿縮回過程中系統流量保持6L/min。
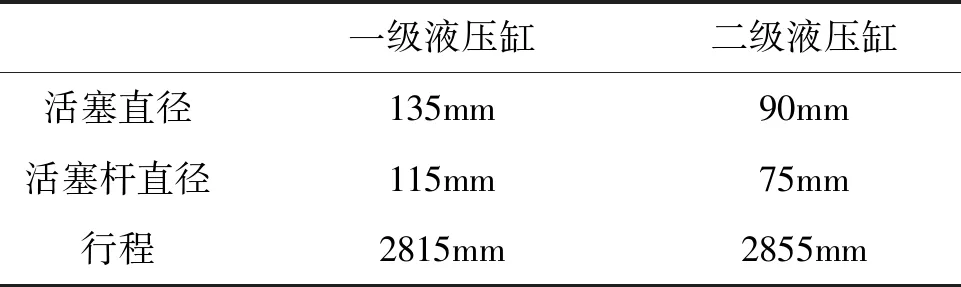
表1 雙級液壓缸參數
2 分析與討論
2.1 結果分析
對液壓系統進行仿真,圖4所示的是一級活塞和二級活塞位移變化情況。如圖4所示,在0~200s過程中,一級活塞桿和二級活塞桿同時伸出,第200s時一級液壓缸完全伸出;隨后二級活塞桿相對一級液壓缸伸出,由于二級液壓缸橫截面積減小而流量不變,因此二級活塞桿伸出速度增大;290s時二級活塞桿完全伸出。310s時三位四通換向閥換向,雙級液壓缸縮回, 475s時一級活塞桿和二級活塞桿完全縮回。
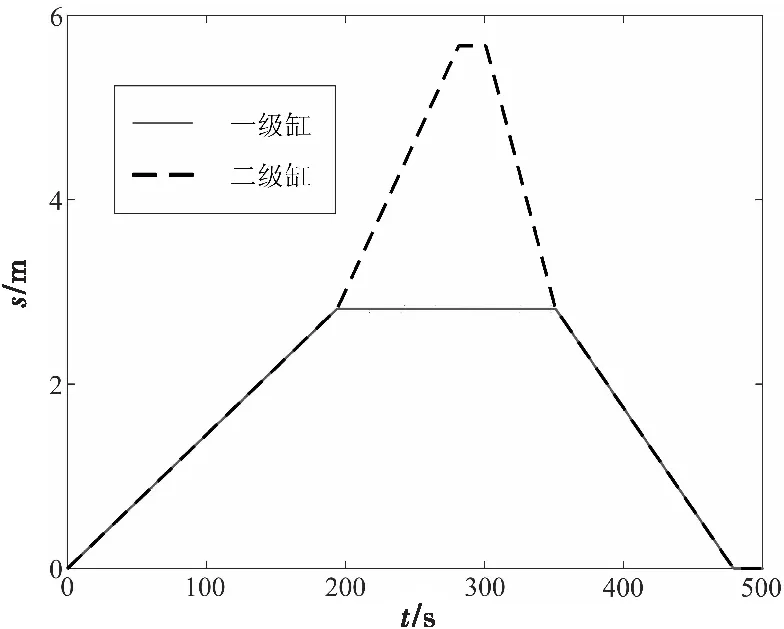
圖4 活塞桿位移變化
圖5所示的是運動過程中一級活塞桿和二級活塞桿速度變化情況。如圖5所示,一級活塞桿和二級活塞桿首先以0.17m/s的速度同時伸出,一級活塞桿完全伸出時,二級活塞桿以0.36m/s的速度伸出;在縮回過程中,二級活塞桿首先以0.49m/s的速度縮回,隨后一級活塞桿和二級活塞桿以0.23m/s的速度同時縮回。無論是伸出還是縮回,換級過程中都有明顯的速度沖擊現象。
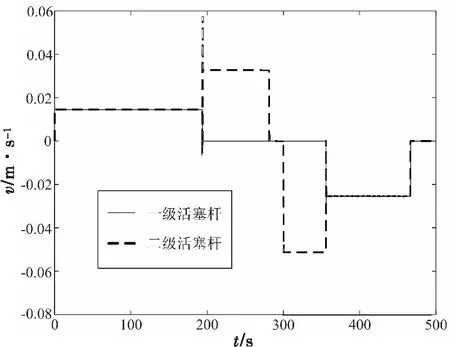
圖5 活塞桿速度變化
圖6所示的是運動過程中有桿腔和無桿腔壓力變化情況。如圖6所示,在伸出過程中,有桿腔壓力均為系統背壓;在一級活塞桿和二級活塞桿同時伸出時,無桿腔壓力為12bar,二級活塞桿單獨伸出時,無桿腔壓力為32bar,且伸出過程中無明顯的壓力沖擊現象。
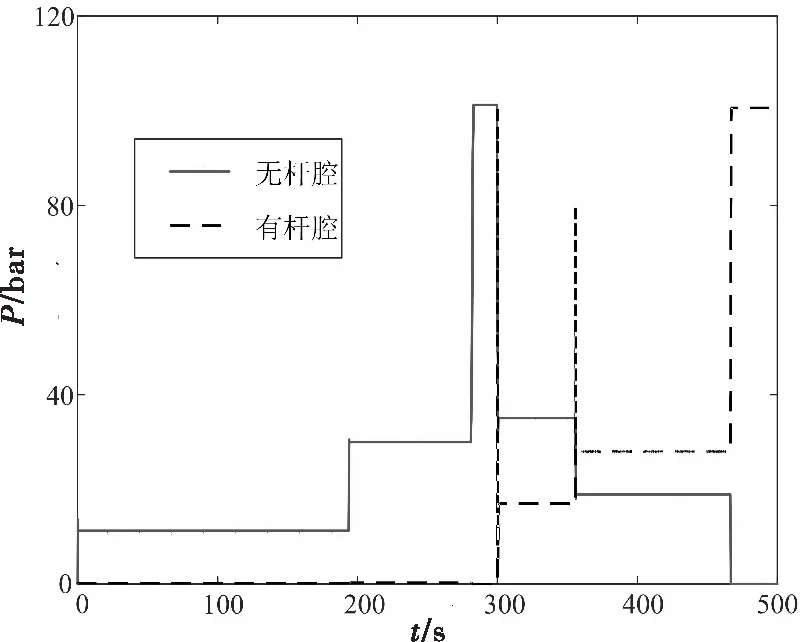
圖6 有桿腔和無桿腔壓力變化
在縮回過程中,二級活塞桿單獨縮回時,有桿腔壓力為16bar而無桿腔壓力為37bar,一級活塞桿和二級活塞桿同時縮回時,有桿腔壓力為30bar而無桿腔壓力為18bar;在縮回液壓缸換級過程中,有桿腔內有明顯的壓力沖擊現象,該壓力峰值達到80bar。
根據上述仿真的結果可知,在雙級液壓缸運動過程中,換級時由于活塞作用面積發生變化,因此會發生壓力沖擊,從而引發速度突變,造成振動等安全隱患,后文將對雙級液壓缸換級過程中的壓力與速度沖擊現象進行具體分析。
2.2 流量的影響
結合前文分析,本節將對不同流量下雙級液壓缸運動過程時換級過程進行仿真,探究流量對伸出過程中換級時速度沖擊的影響和縮回過程中換級時壓力和速度沖擊的影響。
圖7所示的是雙級液壓缸伸出過程中,不同流量下換級過程中速度沖擊規律。如圖7所示,隨著流量不斷減小,速度沖擊引起的速度峰值不斷減小,而速度達到穩定所需時間增長。當流量分別為12L/min、6L/min、3L/min和2L/min時,速度峰值分別為0.061m/s、0.028m/s、0.013m/s和0.010m/s;而速度達到穩定所需時間分別為0.25s、0.58s、1.12s和1.66s。
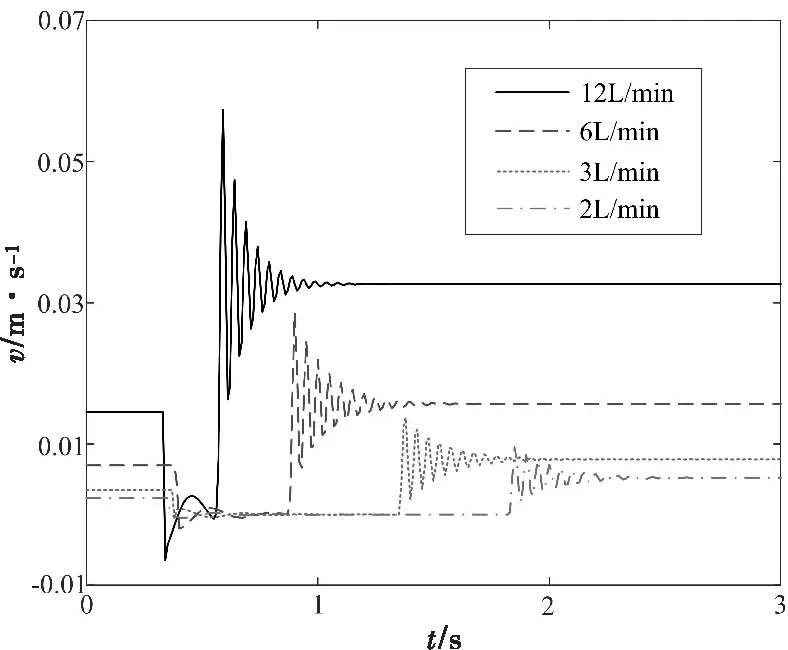
圖7 不同流量下的速度沖擊(伸出)
圖7所示的是雙級液壓缸縮回過程中,不同流量下換級過程中速度沖擊規律。如圖7所示,隨著流量不斷減小,速度沖擊引起的速度峰值不斷減小,當流量分別為6L/min、3L/min、1L/min和0.5L/min時,速度峰值分別為0.047m/s、0.020m/s、0.011m/s和0.008m/s。
圖9所示的是雙級液壓缸縮回過程中,不同流量下換級過程中壓力沖擊規律。如圖9所示,隨著流量不斷減小,壓力沖擊引起的壓力峰值不斷減小,當流量分別為6L/min、3L/min、1L/min和0.5L/min時,壓力峰值分別為80bar、64bar、45bar和33bar。
綜上所述,根據圖7、圖8和圖9的分析結果可知,隨著流量的減小,雙級液壓缸換級過程中引起的沖擊現象逐漸減小。可以預測的是,在雙級液壓缸換級的一瞬間,系統流量若為0,則此時不會產生任何沖擊現象,因此,理想狀況下,在換級過程中,系統流量應當先減小再增大,在換級的一瞬間確保流量為0。然而實際工程應用中,液壓缸的使用受到環境溫度、海拔等多種復雜因素的影響,難以實現精確控制。因而在實際應用中,在換級之間先將流量降低至一固定值,換級完成后將流量增大。

圖8 不同流量下的速度沖擊(縮回)
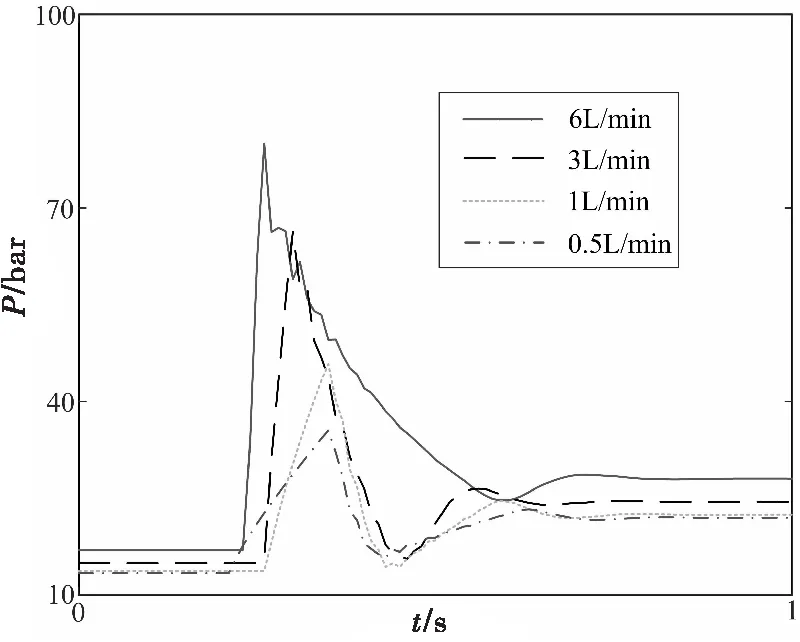
圖9 不同流量下的壓力沖擊(縮回)
2.3 流量控制策略
本節在2.1和2.2的基礎上,對雙級液壓缸運動過程中系統流量進行調節,從而削弱雙級液壓缸換級過程中的壓力與速度沖擊現象。
圖10所示的液壓缸伸出過程中位移與速度曲線,如圖10所示,在0~180s過程中,系統流量為12L/min,一級活塞桿和二級活塞桿以0.17m/s的速度同時伸出;在180~210s過程中,系統流量首先12L/min降低至2L/min,隨后保持恒定,在液壓缸換級后再由2L/min增大至12L/min,最后保持12L/min恒定。

圖10 位移與速度(伸出)
圖11所示的液壓缸伸出過程中位移與速度曲線,如圖11所示,在0~90s過程中系統流量為6L/min,二級活塞桿以0.49m/s的速度縮回;在90~120s過程中,系統流量首先6L/min降低至0.5L/min,隨后保持恒定,在液壓缸換級后再由0.5L/min增大至6L/min,最后保持6L/min恒定。

圖11 位移與速度(縮回)
根據圖10和圖11的結果可知,在雙級液壓缸換級時降低其流量能夠抑制壓力與速度沖擊現象,從而確保液壓缸運動更為平緩,有利于延長液壓缸壽命,增強液壓系統穩定性。
3 結束語
本文借助AMESim商業軟件建立了高機動雷達雙級液壓缸舉升系統仿真模型,并對不同流量下雙級液壓缸運動過程進行仿真,得到的主要結論有:
1)雙級液壓缸換級過程中有明顯的壓力與速度沖擊現象,對本文研究的系統而言,第二級活塞桿伸出和縮回時,沖擊所產生的速度峰值分別為0.061m/s和0.047m/s。
2)換級過程中速度沖擊著系統流量的減小而減小,第二級活塞桿伸出過程中,當流量分別為12L/min、6L/min、3L/min和2L/min時,速度峰值分別為0.061m/s、0.028m/s、0.013m/s和0.010m/s;第二級活塞桿縮回過程中,當流量分別為6L/min、3L/min、1L/min和0.5L/min時,速度峰值分別為0.047m/s、0.020m/s、0.011m/s和0.008m/s。
3)得到了某高機動雷達液壓系統雙級液壓缸運動過程流量控制策略,該策略有效地削弱了雙級液壓缸運動過程中換級時產生的壓力與速度沖擊現象。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
