無人地面車輛感知技術綜述
2023-07-15 14:00:04孔祥輝段芳芳
火控雷達技術 2023年2期
關鍵詞:檢測
李 飛 呼 斌 孔祥輝 段芳芳
(西安電子工程研究所 西安 710100)
0 引言
在現代戰爭中,陸軍從以重裝甲、強火力為特征的軍事力量向更輕便、反應更迅速、具有高殺傷力與高生存性的目標部隊轉型,具有實用性的無人地面車輛系統的發展成為未來的趨勢[1-2]。與空中無人飛行器(UAV)相比,無人地面車輛(UGV)的運行環境則要復雜得多,在技術發展和系統集成等方面所面臨的挑戰也將是巨大的。無人地面車輛感知系統涉及廣泛的技術領域,如圖1所示。
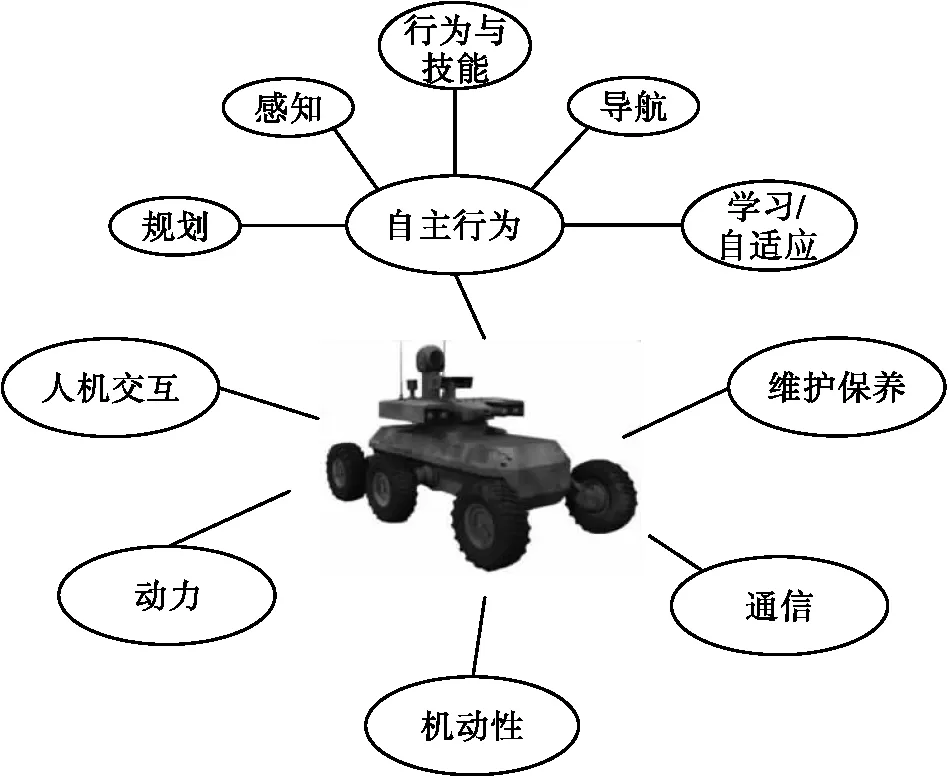
圖1 UGV研究所涉及的技術領域
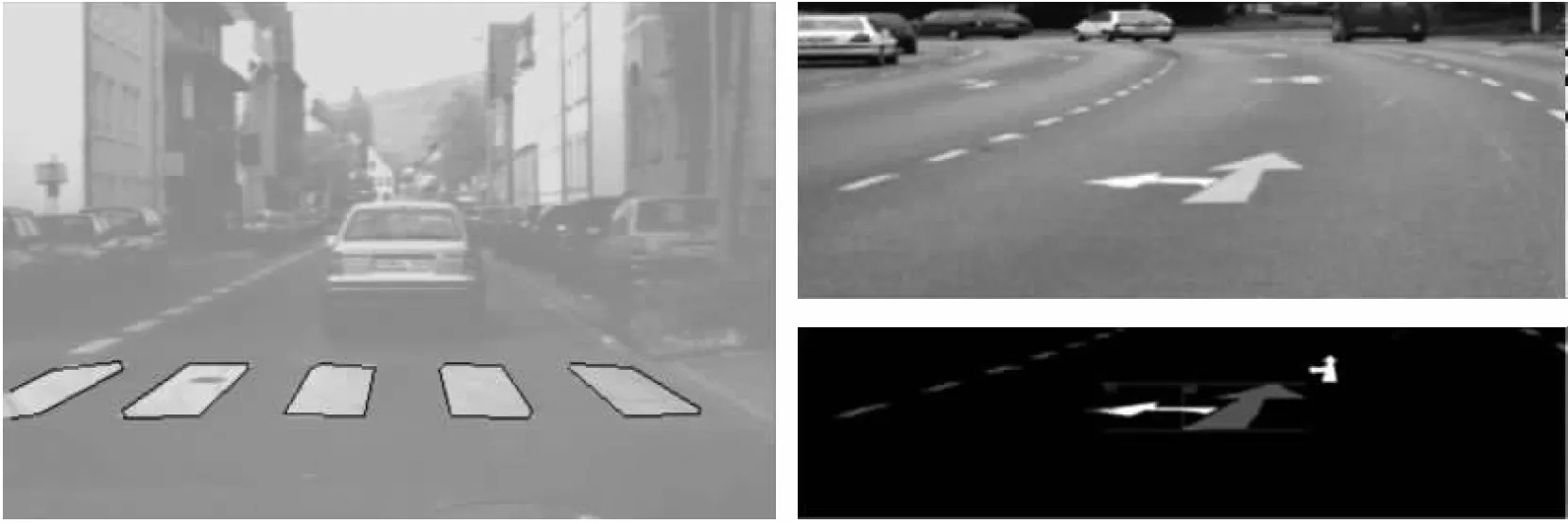
圖2 被檢測出的路面指示標志
1 無人平臺任務管理
軍用無人平臺可以執行偵察、監視乃至作戰任務,是一種用途非常廣泛的武器系統。由此,美國有關部門根據未來的軍事戰略構想,針對軍事專家就無人平臺的使用范圍及其優先順序開展了調查研究,其結果如表1所示。
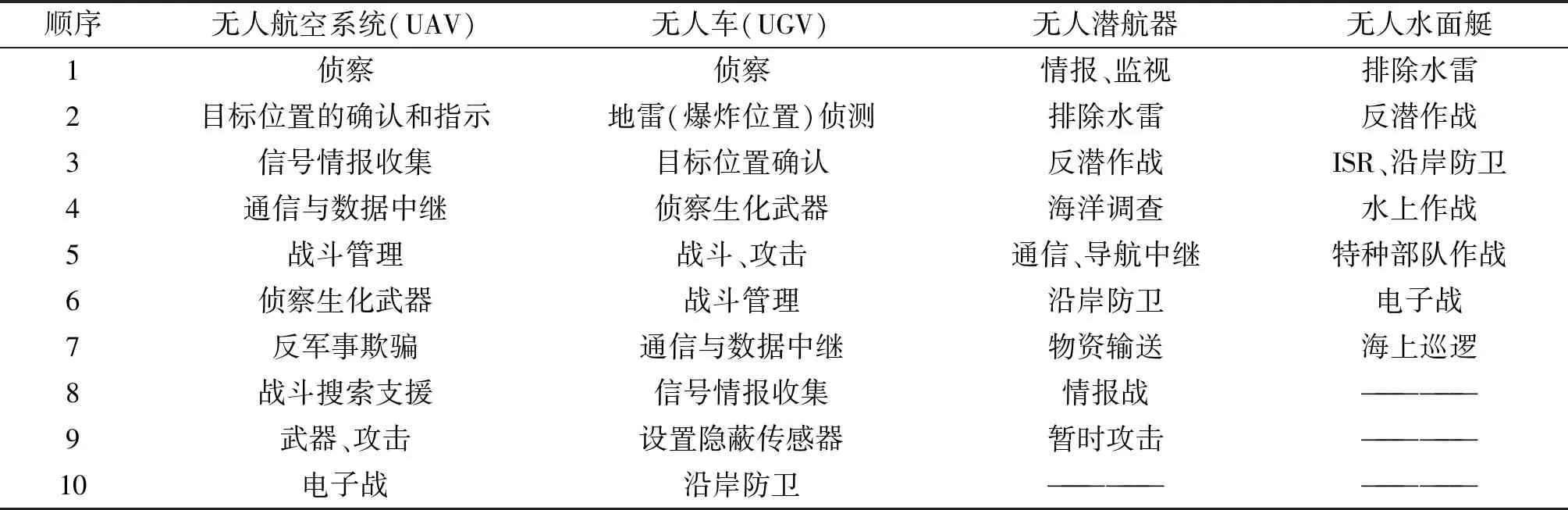
表1 各種無人平臺的使用范圍和優先順序
由表1可以看出:UGV的任務范圍涵蓋了所有重大軍事領域,但主要任務被認為是“偵察”。美國軍事專家認為無人平臺執行侵入敵方領域執行情報搜集任務是最有發展前途的。
由于地貌、地形和人工的影響,UGV工作在一個極為復雜的環境中。未來作戰系統UGV很可能運行在任何氣候條件下(雨天、霧天及雪天等),不分晝夜,有沙塵或其他干擾戰場的因素存在,也要與友軍配合對抗敵軍。表2總結了UGV在公路和越野場景中行駛時感知系統的任務,可以看到,由于野外環境的復雜性,感知系統的任務要比公路行駛時要繁重得多。

表2 感知任務表
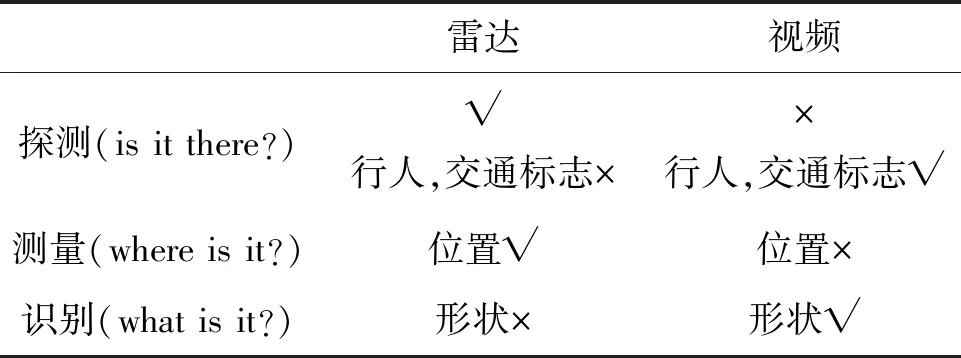
表3 毫米波雷達和視頻傳感器性能對比
UGV在行駛中可能會面臨各種不同的地形和植被(沙漠、林地、灌木叢、草地、公路和城市等);需要避開各種類型和大小的正障礙(巖石、倒了的樹、倒塌的磚墻和過于陡峭的坡等)和負障礙(壕溝和沼澤地等);并且還可能遇到有戰術意義的其他特征(森林邊界和山脊等)。當UGV沿公路行駛時,需要檢測道路特征;而越野行駛時,則需檢測符合戰術約束(隱蔽、可通過)的機動通道特征。UGV還需要檢測、分類和定位各種自然和人造特征(作為地標),以便精確確定自身位置和規劃戰術路徑。
2 無人地面車場景感知技術發展現狀
2.1 單傳感器場景感知
2.1.1 道路和障礙檢測
對于公路環境,在結構化的開闊道路(例如,已知寬度和轉彎半徑等幾何特征的干道和高速公路,車道標記明顯,有確定的邊緣)上的車道檢測已經有了相當多的研究。通常是將事先已知的關于道路幾何特征和其他性質的知識與通過感知系統檢測到的特征(例如,車道標記,路邊)相結合,用以確定車道和其中車輛的位置。用于車道檢測和跟蹤的傳感器包括立體[3]和單目[4]彩色攝像機,還有在夜間和能見度有限情況下使用的前視紅外雷達(Forward Looking Infrared Radar,FLIR)。與結構化的開闊道路不同,城市環境中的車輛、行人或建筑物等很有可能遮斷開闊道路環境中用于確定車道的很多線索。Franke等人[5]通過檢測車道線、路邊、停車線、人行橫道線、交通標志牌等,進行車道檢測和跟蹤。
對于大多數的道路,由于道路邊緣存在護欄,防護障,綠化帶等具有強雷達回波的物體。因此,可以根據這些物體的回波來檢測道路邊緣。圖3所示為道路邊緣的場景成像效果圖:圖3(a)所示為在具有護欄的道路場景下雷達的成像結果。從中可以看出有兩串明顯的強回波點,就是護欄所成的像。在進行護欄檢測時,可以參考在視覺系統中道路邊緣檢測的方法,使用霍夫變換尋找圖中的兩條最明顯的直線,圖3(b)所示。
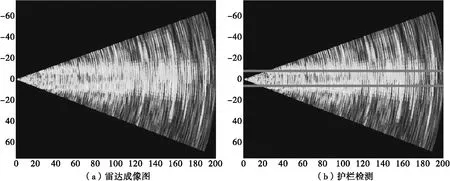
圖3 道路邊緣的場景成像效果圖

圖4 基于HSI彩色空間的道路檢測
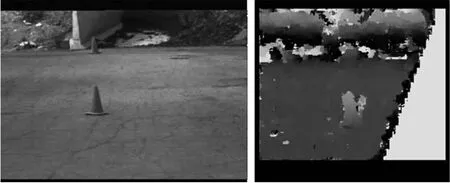
圖5 立體視覺檢測障礙物
而對于越野環境,Chaturvedi等人[6]用貝葉斯分類器將路段從彩色圖像背景中分割出來。他們的研究主要針對由紅色泥土道路和綠色植被構成的場景,并在二者區分度較好的HSI(色相,飽和度和亮度)彩色空間展開。雖然此算法受到紅色道路的限制,但它表明彩色分割可用于非結構化道路的檢測和跟蹤。
對于障礙檢測,Williamson[7]在結構化道路上開展了對靜態正障礙的研究,他搭建的三相機立體視覺系統能夠檢測位于110m處的高度為14cm的物體。在非結構化道路上檢測障礙的研究還很少,事實上,坡度的突變往往會導致障礙檢測算法的虛警。路上障礙檢測的很多技術都采用攝像機作為傳感器。盡管通過采用外部照明,它們也可用于夜間,但在霧天、煙霧及其他能見度受限情況下效果則不佳。采用FLIR和LIDAR傳感器可提高系統在夜晚和有限能見度時的性能,但價格昂貴,LIDAR還受到作用距離的限制。
通過雷達對真實場景的大量實地觀測表明,可以通過回波特征進行陷阱識別。陷阱識別可以采用特征匹配的方法,陷阱的特征包括:一是陷阱后壁有較強回波;二是陷阱區域內的地雜波較弱。根據陷阱的特征,選擇距離上前弱后強的模板進行匹配,可以有效提取陷阱的后壁位置,最后在雷達原始成像圖中提取陷阱,圖6為陷阱檢測提取的陷阱檢測效果圖。
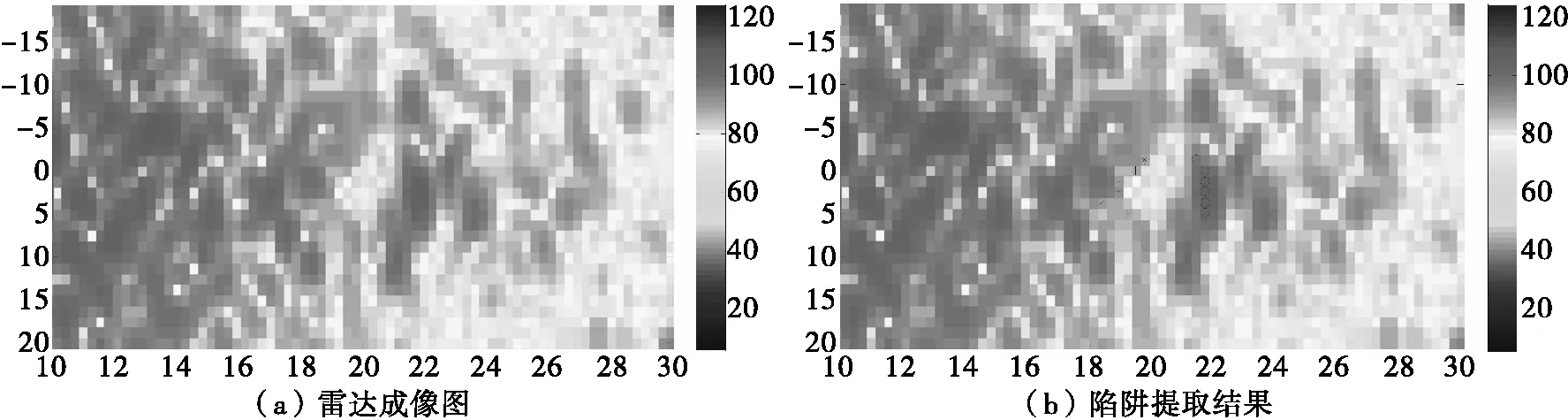
圖6 陷阱檢測效果圖
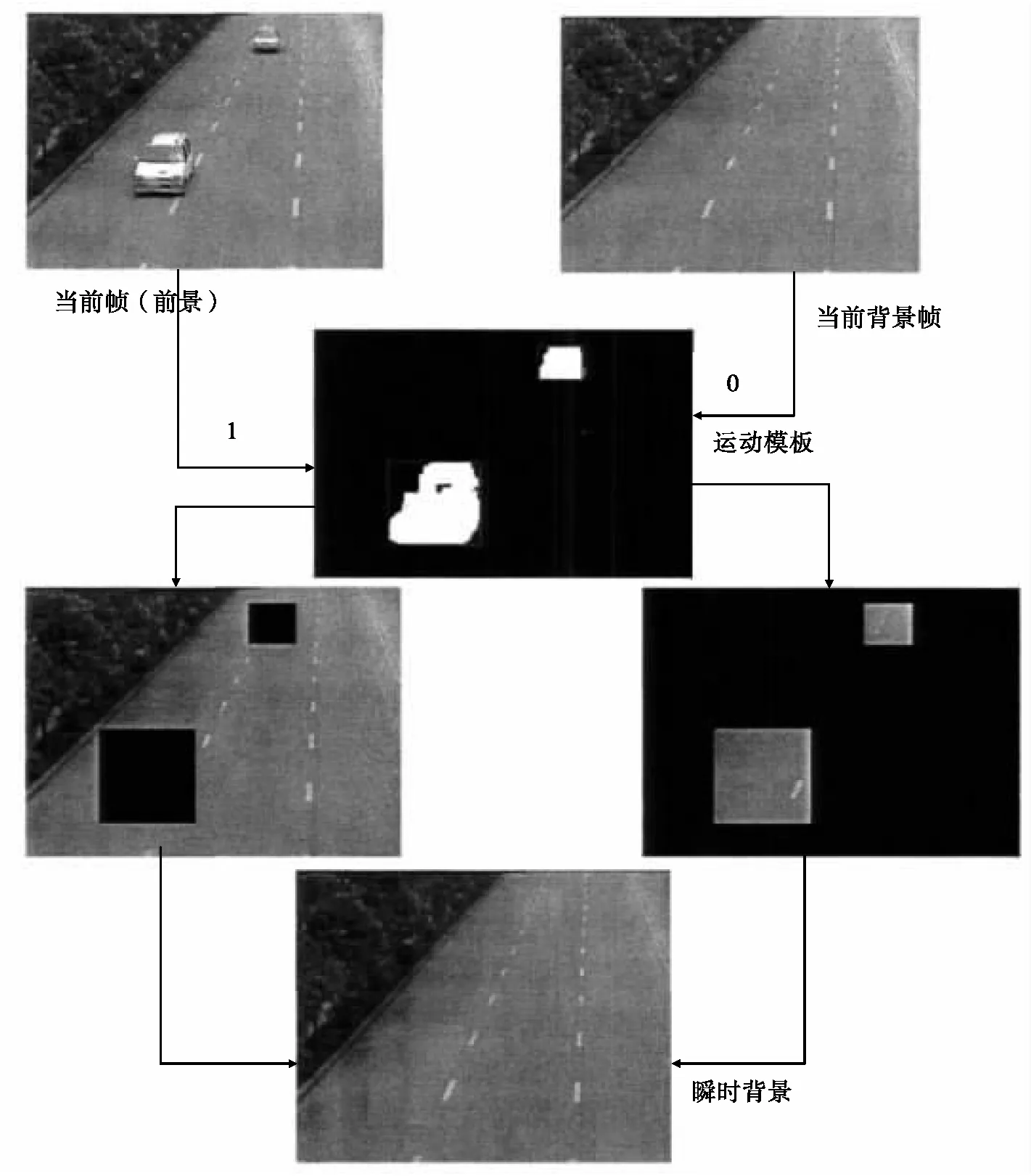
圖7 背景差法示意圖
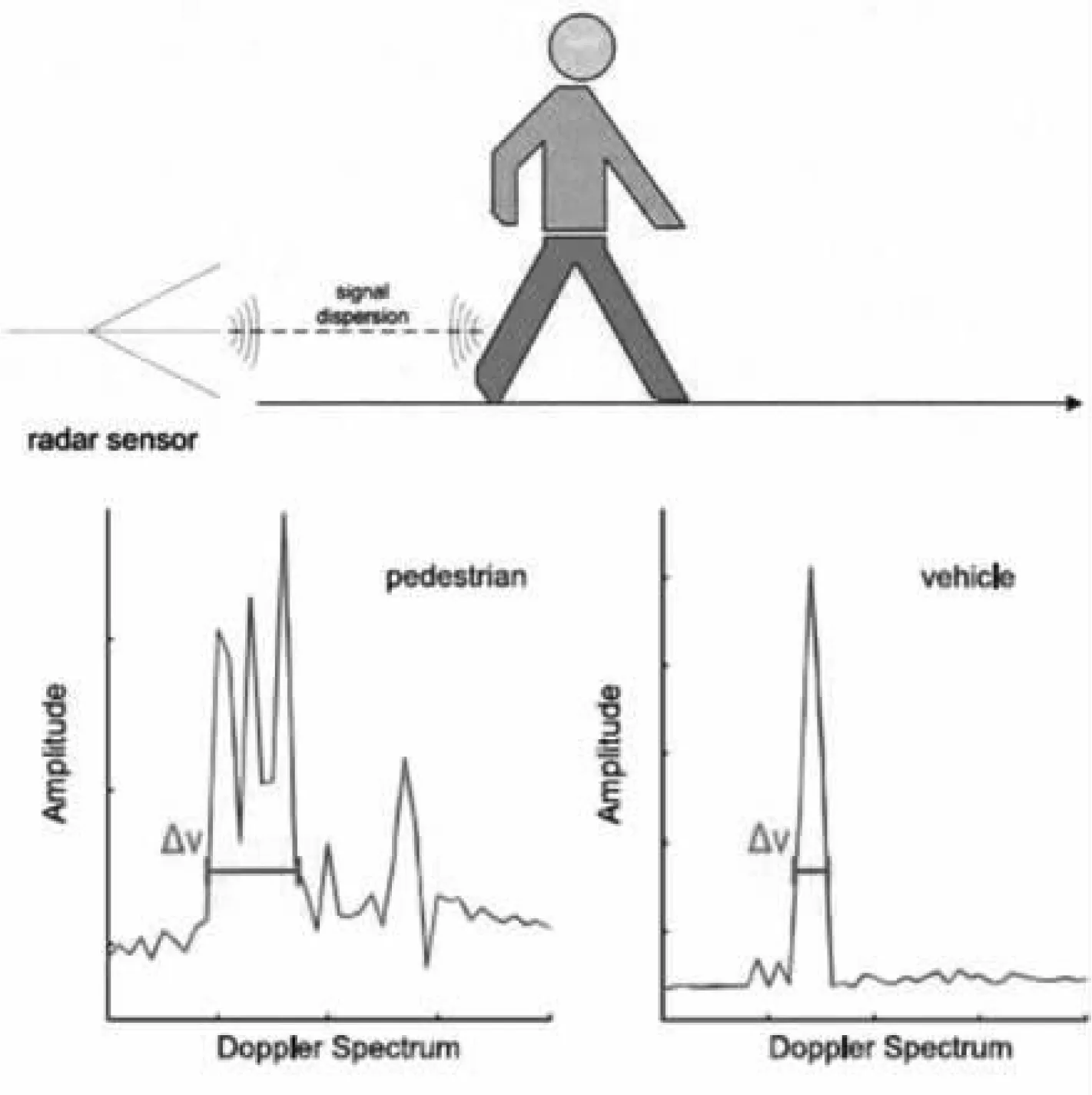
圖8 行人與車輛多普勒譜對比

圖9 Langer搭建的車輛行駛環境感知系統
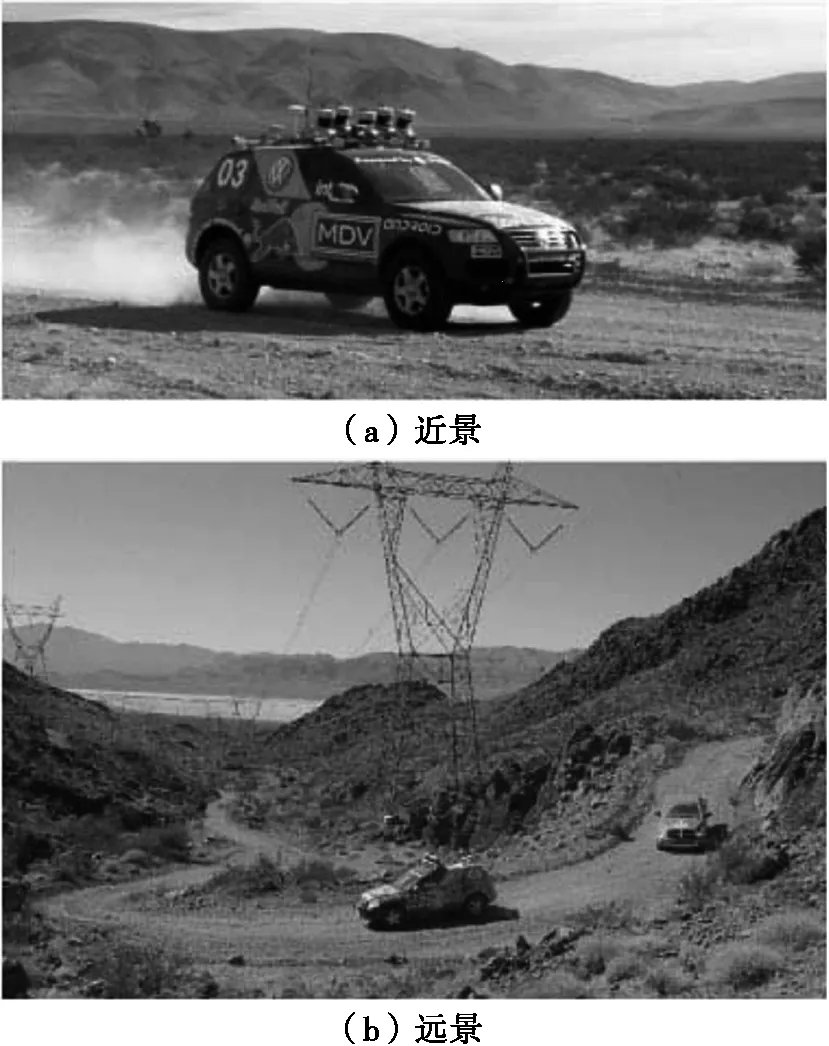
圖10 機器車Stanley比賽中的照片
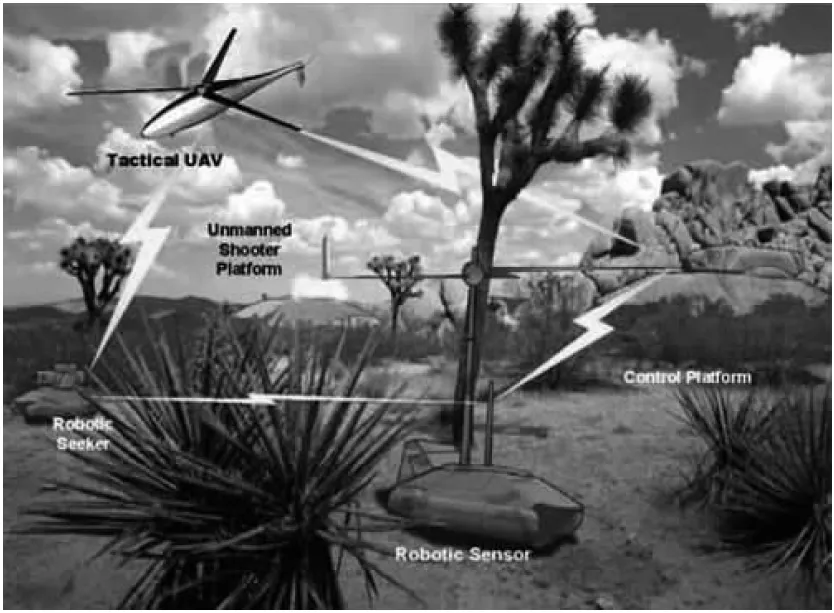
圖11 美軍未來作戰系統
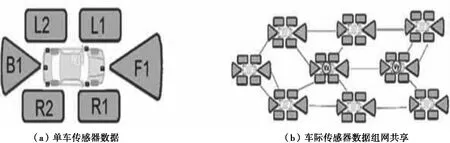
圖12 單車數據與車際組網數據共享
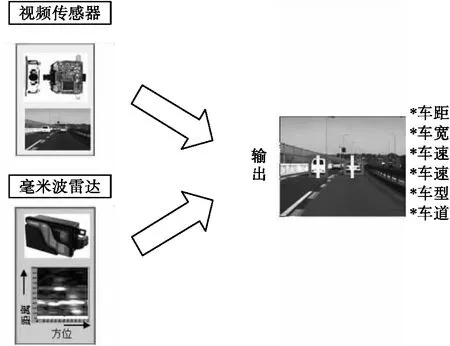
圖13 多傳感器數據融合示例:毫米波雷達+攝像機
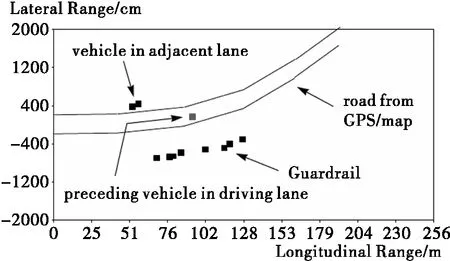
圖14 多傳感器數據融合示例:毫米波雷達+電子地圖
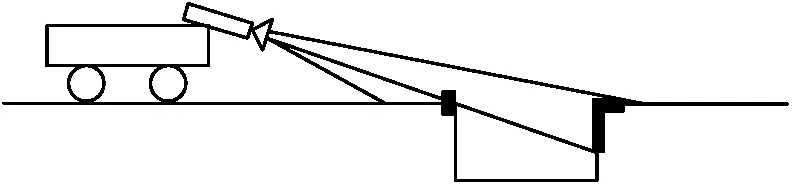
圖15 負障礙的檢測挑戰
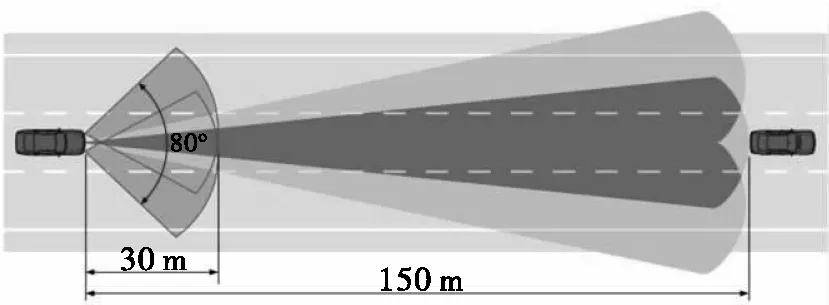
圖16 窄波束長距離/寬波束短距離雷達
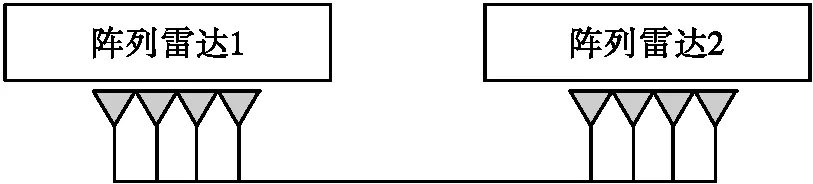
圖17 雙目雷達示意圖
2.1.2 車輛和行人檢測
對運動車輛的提取,在視頻圖像處理中可以采用幀間差法或當背景差法[8]。幀間差法是將相鄰的圖像幀進行差分,有運動目標的區域由于相鄰兩幀的不同會顯現出來。幀間差法實現容易,計算速度快,但對目標的提取不完整,并且提取運動速度較慢的目標難度較大。背景差法需要先得到一個背景圖像,通過當前圖像幀與背景圖像的相減提取出運動的目標,同時更新背景圖像。
對運動車輛的檢測也可以采用毫米波雷達測速實現,通過發射多個具有不同調頻率的線性調頻連續波(Linear Frequency Modulated Continuous Wave, LFMCW)波形來獲得目標距離和速度的不同線性組合,進而解出目標的距離和速度,也可以利用各個波形發射周期間的相位變化來檢測多普勒頻率,進而獲得目標的速度。
對于行人檢測,Franke等人在攝像機獲取的圖像中通過檢測運動的雙腿來檢測行人。考慮到行人在走動過程中身體各個部位間的相對運動要比運動車輛復雜得多,因此在多普勒譜上與運動車輛相比會有較大的展寬,根據這一特征,Rohling等人[9]從24GHz毫米波雷達獲取的回波數據中提取多普勒譜和一維距離像,進行運動車輛和行人的區分。
2.2 多傳感器融合技術
事實上,一種傳感器不管處理得多么高明也不可能做各種事,人們逐漸考慮采用多傳感器模式,將不同傳感器的結果組合起來以實現全天候的魯棒檢測[10]。應用于UGV上的傳感器(彩色攝像機、前視紅外、激光雷達和雷達)各自的優缺點總結如下:
1)彩色攝像機:視頻傳感器是使用攝像機采集視頻信息,通過圖像處理的方式感知目標和道路場景的信息,視頻傳感器的優勢在于成像分辨率較高,目標識別比較容易,而且數據采集方式簡單。其缺點是作用距離較近,受天氣,光照等因素影響明顯,在夜晚環境無法正常工作。
2)前視紅外:紅外熱像儀采集目標紅外輻射的能量進行成像,克服了視頻傳感器在夜晚和光照不足時無法工作的缺點,由于車輛的熱輻射較強,所以在紅外成像圖中車輛有比較明顯的特征。紅外熱像儀的缺點是成像質量不如視頻傳感器,道路特征不容易識別,而且造價較高。
3)激光雷達:激光雷達通過主動的發射激光光束,通過接收目標反射光來測定目標的信息。且由于激光束的波束很窄,激光雷達可以達到很高的距離和方位分辨力,而且能達到較遠的作用距離。激光雷達面臨的問題是云霧,雨雪天氣無法工作。
4)雷達:波長最長,作用距離最遠,具有全天候工作能力。隨著在汽車應用上的普及,價格相對較低而且可靠。通過選擇適當的頻率有可能探測到樹葉和草叢中的障礙,可依據回波強度的不同對目標材質做有限的分類,可檢測圍欄、路標、護欄和電線,對于運動物體、車輛和行人具有良好的檢測性能。缺點是分辨率低,目標識別有一定難度。
2.2.1 民用多傳感器平臺
Langer[11]開發了一套將77GHz雷達數據、攝像機和電子地圖數據組合的系統。雷達用于檢測和定位其他車輛,使得RALPH可以通過自主控制車速與前車保持安全距離;攝像機檢測到的道路幾何特征提供給RALPH道路跟蹤系統,用于保持車輛橫向位置;來自RALPH的道路幾何信息被用于抑制雷達雜波和減少虛警。
2005年DARPA主辦的機器車挑戰大賽(Grand Challenge)冠軍由斯坦福大學研制的機器車Stanley[12]獲得。Stanley裝備了激光雷達、攝像機和24GHz毫米波雷達。激光雷達負責感知距離車輛25m以內的場景,可以繪制出詳細的地形;攝像機作用距離較遠,主要用以識別道路;24GHz毫米波雷達作用距離最遠,達200m,可用以探測障礙物等。隨著車輛的駛近,攝像機和毫米波雷達的遠距離探測結果可用以輔助激光雷達的判決。
2.2.2 軍用戰場偵察系統
波音公司設計、研制和演示了無人作戰系統最大的無人車ARV。ARV分為兩個型號:用于執行偵察、監視和目標捕捉任務的偵察型車(ARV-R)和通過遙控操作執行直瞄或者間瞄射擊任務以支援士兵乘車作戰和徒步作戰的攻擊型車(ARV-A)。ARV-R為城市作戰和其他戰場提供遠程偵察能力,將傳感器、直瞄武器和特種彈藥部署到建筑物、掩體、隧道和其他城市地形中,并能夠提供通信中繼和戰斗毀傷評估。裝備了一個5m高的可伸縮桅桿,其上裝備了光電、紅外、激光傳感器組件、多功能Ka波段雷達,能夠實現對目標的偵察、監視等偵察能力。
新加坡南洋理工大學研制的感知周圍環境的無人車輛環境感知系統具備了先進的傳感器系統,包括雷達、激光探測器、三維相機、超聲波傳感器和GPS定位系統,能夠識別靜態目標、捕捉動態目標,具有自動駕駛的能力。
“阿韋多-2004”是以色列研制的一部無人地面戰車系統,其上安裝了用于障礙物探測的和道路識別的電視、激光、超聲裝置和雷達傳感器,以及基于地理信息技術、差分全球定位系統(DGPS)和綜合導航系統(INS)的地面與空中地圖系統的定位系統,用于停留處目標的跟蹤。
3 無人平臺場景感知技術的發展方向
3.1 空地結合
UGV的場景感知受到諸多條件的限制。首先,傳感器作用距離有限,即使是作用距離最遠的毫米波雷達也一般不超過250m,作用距離還會因為灌木草叢、墻壁土坡等的遮擋而進一步減小;其次,UGV的成本、最大載荷等的限制也使得UGV不一定能夠裝備所有類型的傳感器,因此只能獲得有限的感知能力;此外,作戰環境的限制(夜晚、雨霧等)也會使得UGV感知能力下降。
未來戰爭將是海陸空軍多兵種聯合作戰的立體戰爭,精確打擊空中力量和無人駕駛飛行器正在改寫著作戰的規則。無人機在空中作戰,有著作戰半徑大、機動能力強、視野寬廣等優點,但容易受到復雜地形(高山、峽谷等)和惡劣天氣的影響,不能很好地完成作戰目標。在制空權未完全取得的情況下,容易受到來自敵方空中力量和地面防空火力的攻擊。通過無人機投放UGV,并將無人機傳感器數據(合成孔徑雷達成像、高空攝像等)融合后提供給UGV,可以提高UGV場景感知效率和感知范圍,幫助其在復雜環境中更有效行駛,與無人機形成配合偵查和作戰。
3.2 數據共享
UGV在編隊或小組行進時,可以通過組網實現傳感器數據共享和協同工作,根據各個UGV所處位置的不同為其傳感器分配不同的任務,例如位于隊伍首尾的UGV可以承擔較多的場景感知任務,而位于隊伍中間的UGV則可以承擔較多數據中繼任務,可以達到資源優化配置的目的。不同位置的UGV傳感器數據共享也有利于建立對場景更全面的認知,部分傳感器缺失或損耗的UGV也可以利用其它UGV分享的場景感知信息繼續工作。此外,組網協同工作也可以避免各UGV的主動傳感器(激光雷達和毫米波雷達)之間的相互干擾。
UGV編隊的傳感器數據共享還可用于實現編隊中的自動車輛跟蹤。數項汽車研究了使車輛能夠在公路上以短間距自動相互跟蹤的方法。它可用于在公路上甚至越野運行的陸軍補給車隊,使車輛緊靠著行駛,以節約燃料和提高公路基礎設施的運輸效率。而在戰場環境中,出于躲避敵方火力等的需要,可能會反其道而行之,希望車輛分散行駛。UGV編隊的緊靠和分散行駛都需要通過傳感器數據共享確定各成員車輛間的相對和絕對位置以后才能得以實現。
多平臺協同[13]是將不同的信息節點采用高速、寬帶數據傳輸網絡進行數據鏈接,具備復合跟蹤和識別、精確提示和協同聯合作戰等三大功能,可實現一致的圖像傳輸;采用無中心的對等網絡結構,支撐大容量數據的高可靠傳輸,支持動態組網。多平臺協同技術包含大協同技術和小協同技術兩個方面:大協同技術是將整個戰場區域上的作戰設備,包括有人設備、衛星、無人機、無人車通過信息傳輸實現信息共享和作戰協同;小協同為在某個作戰區域內無人平臺和有人設備通過通信和信息網絡實現人機互動。
3.3 數據融合
多傳感器模式,只有通過數據融合,把多傳感器的結果有效組合起來才可實現全天候對場景的魯棒感知。事實上,不同傳感器的優勢和劣勢可以互補,以毫米波雷達和視頻傳感器為例,它們的性能對比如表 3所示。
因此,可以采用雷達傳感器首先獲取道路中車輛的位置和速度信息,再通過坐標變換,定位車輛在視頻圖像中的位置,進而進行車型和車道識別,就可以實現車輛防撞預警和車速控制,更進一步地,如果利用GPS和電子地圖,還可以實現路徑規劃。采用多傳感器數據融合的場景感知系統,通過優勢互補,可以有效提高數據處理速度,與依賴單一傳感器的感知系統相比魯棒性也大大加強。
3.4 認知傳感器
負障礙的檢測受到幾何條件的限制,如果傳感器的高度不夠高,將無法觀測到負障礙后壁的回波(這是立體視覺和雷達檢測負障礙的主要依據),造成負障礙的檢測性能不佳。解決該問題的途徑有:一是采用可垂直升降的長桿架高雷達,并輔以俯仰角的調整來達到對負障礙的最佳觀測位置和姿態;二是改變雷達工作波長至厘米波段,該波段電磁波可以穿透地表一定深度,常用于探地和穿墻雷達,從而能夠在一定程度上削弱負障礙前沿對后壁的遮擋,甚至有可能觀測到被木板或草皮覆蓋的負障礙。
考慮到道路彎曲和多車道的影響,為了保證雷達能夠照射到前方道路上的障礙物和行駛車輛,方位波束寬度也不能設計得太小。為了解決此問題,可通過雷達發射功率和發射波束的搭配切換,采用窄波束長距離雷達和寬波束短距離雷達相結合,達到在抑制遠處雜波情況下雷達對全場景的覆蓋。
3.5 毫米波雷達
在各種傳感器中,僅有毫米波雷達傳感器具有可全天候工作的特點,因此進一步研究毫米波雷達傳感器,并克服毫米波雷達方位分辨力較低,目標識別難度較大的問題具有較大的意義。為了獲得較高的分辨力,可以嘗試使用雙目雷達的方法,即在車頭的兩邊各安裝兩部連續波陣列雷達,在后續的處理中對兩部雷達的信息得到融合,以達到高分辨的效果。雙目雷達的示意圖如圖 17所示。
對雙目雷達的信息融合,可以分為波束層的雙目融合和信號層的雙目融合。波束層面的融合,即對兩個雷達獲得不同視角的目標信息的融合。信號層面的融合,即這樣的結構可以獲得更大的雷達孔徑,提高方位分辨力,但同時由于稀疏陣列產生較強的柵瓣,需要克服柵瓣的影響。
此外,在信號處理階段也有著提高雷達方位分辨力的手段,如MUSIC、Capon等高分辨譜估計算法、FOCUSS、clustering FOCUSS[14]等稀疏恢復算法等。但是,這些算法都存在計算量大,難以滿足實時性的要求,以及魯棒性差,在噪聲和雜波存在的情況下性能急劇惡化的問題。
4 結束語
隨著信息技術的不斷發展,UGV越來越廣泛地應用于軍事領域,進行偵察監視、警戒巡邏、高危作業、特種作戰等任務。而場景感知系統作為UGV的“眼睛”,直接影響著UGV能否在復雜的作戰環境中快速尋找和規劃出合理的行駛路徑,是決定UGV性能的關鍵技術之一。本文從單傳感器檢測和多傳感器融合技術兩方面介紹了UGV場景感知技術的發展現狀,并對UGV場景感知技術的發展進行了展望。目前對場景的感知利用更多的往往是分辨力較高的視頻傳感器和激光雷達,毫米波雷達僅僅作為一種輔助手段,用于道路上車輛的檢測和跟蹤。通過自行研制具有測距和測角能力的毫米波雷達傳感器,我們發現可以從雷達對于場景的原始距離/方位成像結果中挖掘更多的信息(道路邊緣、正負障礙等),結合毫米波雷達作用距離遠、可全天候工作的優點,將有可能大大提升現有場景感知系統的感知能力。接下來,提高雷達的分辨力,將雷達傳感器獲取的信息(特別是地形等)與其他傳感器進行有效融合,根據測量結果有目的地調整傳感器位置、姿態甚至是工作方式,以達到對感興趣目標實現更有效的觀測,是值得進一步研究的方向。
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48
