自動駕駛汽車避撞路徑規劃與跟蹤控制仿真研究
2023-07-17 04:56:39楊航張成濤覃立仁趙浙棟
廣西科技大學學報 2023年3期
楊航 張成濤 覃立仁 趙浙棟

摘 要:針對自動駕駛汽車在標準道路下換道避撞的場景,設計基于5次多項式的多段式避撞路徑,根據換道初始與結束時的邊界條件確定5次多項式的各項系數,以側向的安全約束確定縱向的換道安全距離,并考慮換道路徑的最大側向加速度,保證了自動駕駛避撞過程中的舒適性。設計模型預測控制器,采用線性時變模型,將車輛動力學模型線性化后離散化,設計的目標函數中包括跟蹤誤差和控制增量,保證自動駕駛汽車可以在完成避撞路徑跟蹤的同時,消耗最少的能量。添加了控制量約束、控制增量約束和輸出約束,使得所設計的路徑跟蹤控制器滿足自動駕駛汽車執行機構物理約束的要求。最后通過建立Matlab和CarSim聯合仿真平臺,驗證了不同工況下所設計的避撞路徑規劃與跟蹤控制系統的有效性。
關鍵詞:自動駕駛;路徑規劃;5次多項式;模型預測控制
中圖分類號:TP273.5;U463.675 DOI:10.16375/j.cnki.cn45-1395/t.2023.03.002
0 引言
隨著科學技術的不斷發展,汽車作為一系列新技術的載體,正向著智能化和網聯化轉型[1],集環境感知、決策規劃和運動控制于一體的自動駕駛技術成為現代汽車發展的一個重要方向[2]。在自動駕駛汽車行駛的過程中,如何規劃出一條避開障礙物的換道路徑并跟蹤,從而實現避撞的功能是要解決的重要問題。
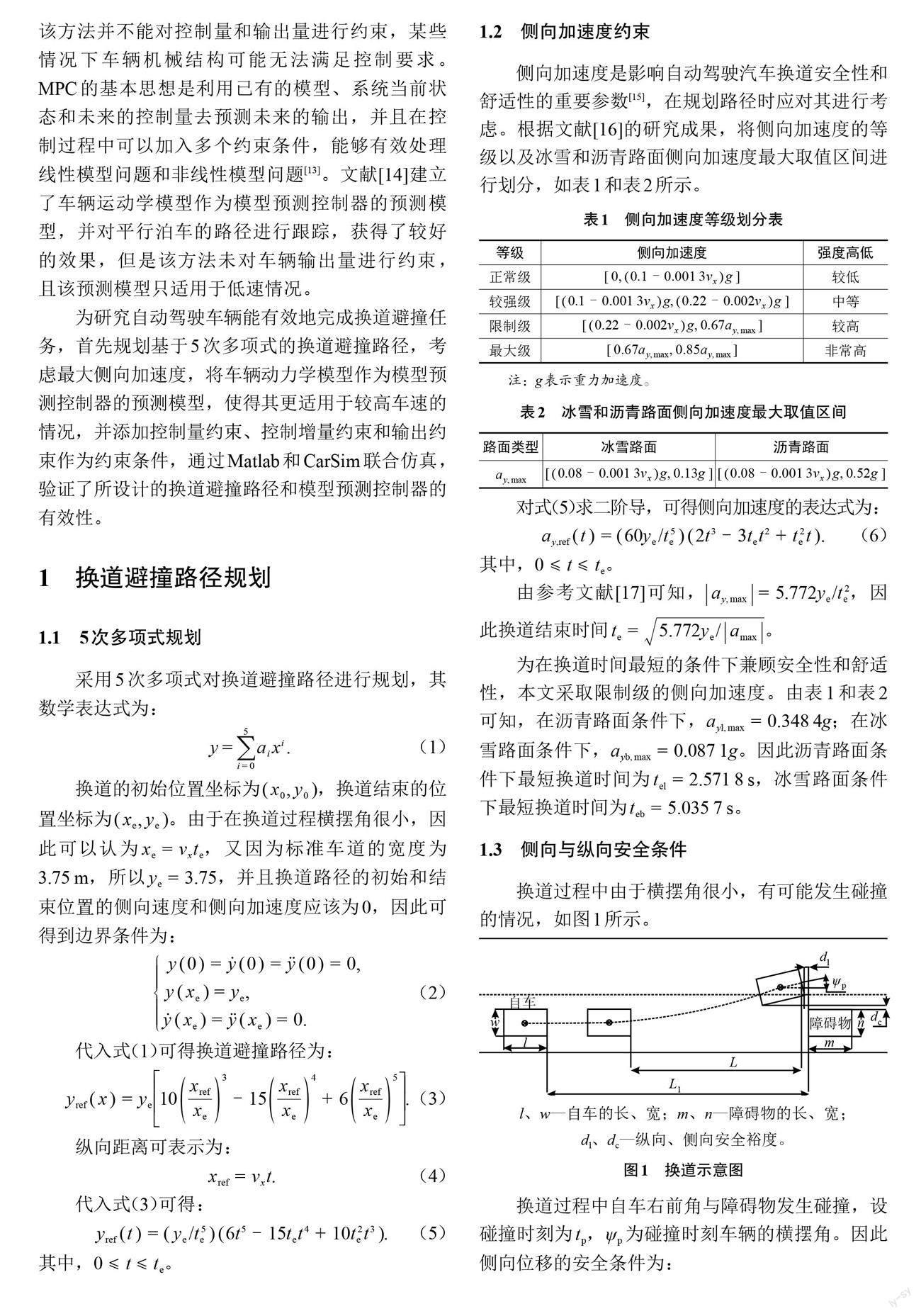
目前路徑規劃主要有圓弧直線路徑[3]、斜坡正弦函數路徑[4]和多項式路徑[5]等。文獻[6]采用圓弧直線組合的方式規劃出了滿足汽車運動學和機械約束的泊車路徑,并取得了較好的實驗結果。圓弧直線路徑是由圓弧和直線組合而成,圓弧處曲率連續,但是在曲線和直線連接處橫向速度和橫向加速度會產生突變。斜坡正弦函數路徑橫向速度和加速度連續,但是在初始位置和終止位置橫向加速度不為0。多項式換道路徑對實際的換道路徑擬合精度高,曲率連續,換道過程橫向速度和加速度曲線連續,并且可以加入約束使得換道初始位置和結束位置橫向加速度為0。文獻[7]規劃了5次多項式換道曲線,但并未考慮最大側向加速度約束與縱橫向安全條件。
運動控制的方法主要有純跟蹤(pure pursuit,PP)控制[8]、線性二次型調節器(linear quadratic regulation,LQR)控制[9]和模型預測控制(model predictive control,MPC)[10]等方法。文獻[11]提出了考慮路徑曲率的純跟蹤算法,由最小二乘曲線擬合法對路徑進行曲線擬合后得到路徑曲率,通過限制車輛過彎時的最大側向加速度來控制最大車速,預瞄距離由當前車速以及當前跟蹤路徑的橫向偏差來調節。PP控制其實質是一種反比例控制器,其將車輛期望位置和當前位置的航向角偏差轉化為前輪轉角控制量。該方法在較大的橫向偏差的情況下能達到比較高的跟蹤精度。但該方法的預瞄距離易受較多參數的影響,在復雜曲率工況下很難保證較強的跟蹤能力。LQR控制方法的基本思想是在一個固定時域內對跟蹤偏差系統進行線性化,建立線性偏差模型,在當前時域對偏差模型進行二次優化求解得到最優反饋控制量,實現跟蹤目標路徑的最優控制輸入。文獻[12]提出了帶有前饋控制的LQR控制算法,相比于傳統的LQR控制算法有更好的適應性和控制精度,但是該方法并不能對控制量和輸出量進行約束,某些情況下車輛機械結構可能無法滿足控制要求。MPC的基本思想是利用已有的模型、系統當前狀態和未來的控制量去預測未來的輸出,并且在控制過程中可以加入多個約束條件,能夠有效處理線性模型問題和非線性模型問題[13]。文獻[14]建立了車輛運動學模型作為模型預測控制器的預測模型,并對平行泊車的路徑進行跟蹤,獲得了較好的效果,但是該方法未對車輛輸出量進行約束,且該預測模型只適用于低速情況。
為研究自動駕駛車輛能有效地完成換道避撞任務,首先規劃基于5次多項式的換道避撞路徑,考慮最大側向加速度,將車輛動力學模型作為模型預測控制器的預測模型,使得其更適用于較高車速的情況,并添加控制量約束、控制增量約束和輸出約束作為約束條件,通過Matlab和CarSim聯合仿真,驗證了所設計的換道避撞路徑和模型預測控制器的有效性。
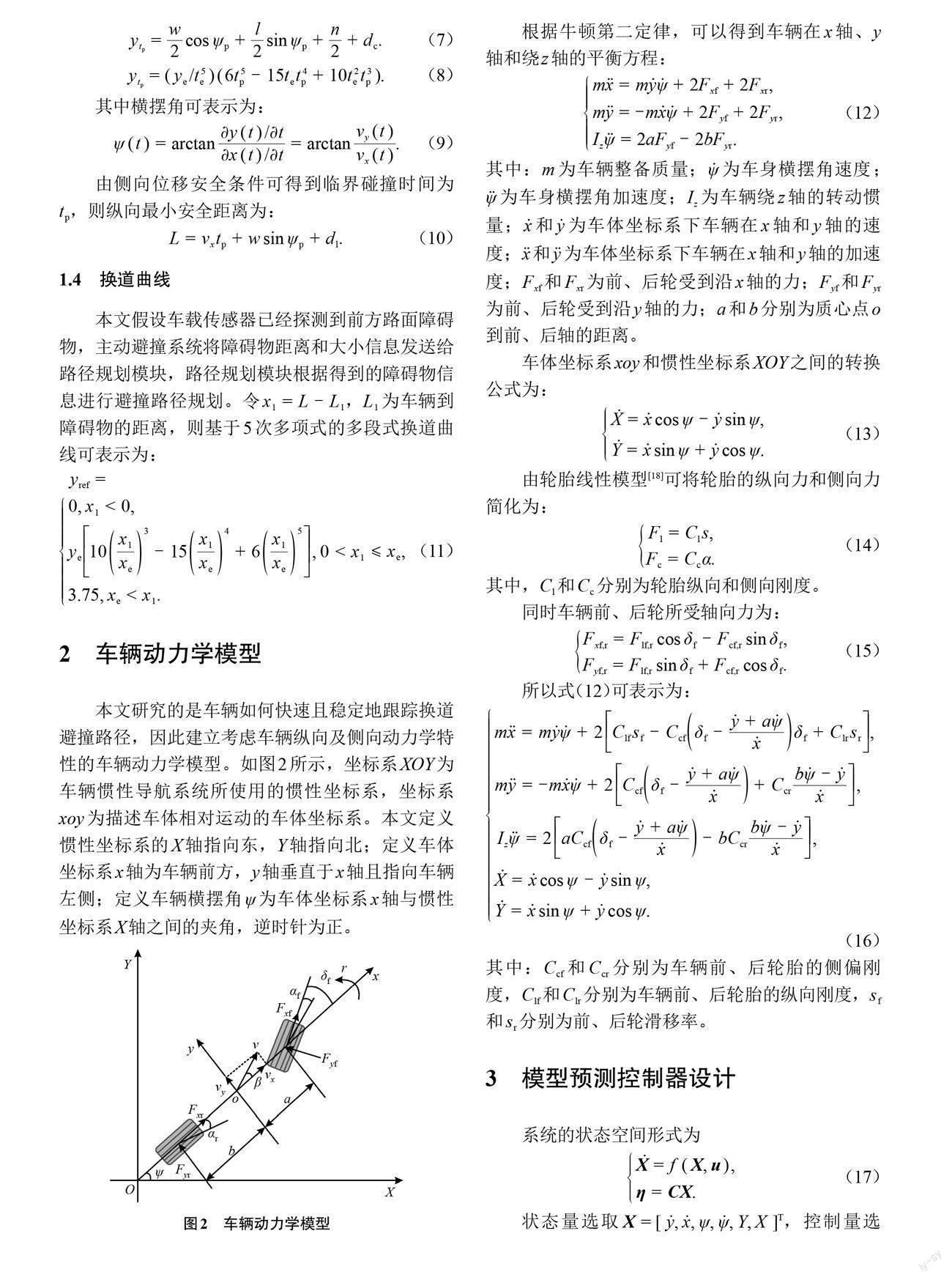
4 仿真結果
本文假設自動駕駛汽車以一定速度在雙向四車道的道路上行駛,在檢測到前方70 m處有障礙物后,車速保持不變,僅進行轉向動作。建立Matlab和CarSim聯合仿真平臺,分別在瀝青路面和冰雪路面對所設計的換道避撞路徑和模型預測跟蹤控制器進行仿真驗證。CarSim仿真動畫示意圖如圖3所示。
4.1 瀝青路面
在瀝青路面條件下,路面附著系數取0.85,自動駕駛汽車分別以60、70、80 km/h的速度在路面上行駛,感知系統檢測到前方有障礙物,自動駕駛汽車進行換道避撞,仿真結果如圖4所示。
由圖4(a)可知,不同速度下自動駕駛汽車在瀝青路面條件都可進行有效的換道避撞,且速度越高縱向安全距離越遠,越早進行轉向。由圖4(b)可知,換道避撞過程中,速度越高,側向偏差越小,這是由于速度越高時,汽車換道避撞的距離越遠,規劃的避撞路徑曲率越小,汽車有更好的跟隨性。車速為60 km/h時,側向偏差的峰值最大,但仍小于0.2 m,可以實現自動駕駛汽車換道避撞功能。由圖4(c)可知,側向加速度隨著車速的增加而增加,車速為80 km/h時側向加速度峰值達到最大值0.28g,仍在規定的最大值0.348 4g以內。由圖4(d)可知,不同車速下的前輪轉角變化比較平穩,滿足車輛的物理條件約束,符合車輛穩定性和舒適性要求。
4.2 冰雪路面
在冰雪路面條件下,路面附著系數取0.2,自動駕駛汽車分別以60、70、80 km/h的速度在路面上行駛,感知系統檢測到前方有障礙物,自動駕駛汽車進行轉向避撞,仿真結果如圖5所示。
由圖5(a)可知,不同速度下自動駕駛汽車在冰雪路面條件都可進行有效的換道避撞,且速度越高縱向安全距離越遠,越早進行轉向。由圖5(b)可知,相較于瀝青路面,冰雪路面在不同車速工況下的側向偏差都有所減小。這是因為冰雪路面的路面附著系數較小,要安全完成換道避撞任務所需的時間更長,所規劃的曲線曲率小,汽車有更好的跟隨性,車速為60 km/h側向偏差的峰值達到最大值0.09 m。由圖5(c)可知,不同車速的最大側向加速度都在冰雪路面所規定的0.087 1g以內,車輛的舒適性較好。由圖5(d)可知,由于所規劃的換道曲線曲率較小的原因,車輛的前輪轉角變化相較于瀝青路面都有所減小,車輛有良好的穩定性和舒適性。
5 結論
本文根據自動駕駛汽車換道初始位置和終止位置、側向最大加速度和縱橫向安全條件等約束,規劃出了一條可以安全避撞的換道軌跡,并設計了模型預測控制器對換道避撞路徑進行跟蹤,通過建立Matlab和CarSim聯合仿真平臺驗證了所設計的換道避撞路徑和模型預測控制器的有效性。仿真結果表明,在瀝青路面和冰雪路面條件下,自動駕駛汽車可以安全且穩定地避開障礙物,完成換道避撞任務,且在冰雪路面條件下,所規劃的換道避撞曲線曲率更小,車輛的跟蹤偏差更小,穩定性和舒適性更高。
參考文獻
[1] 李秋瑋,申彤. 國外自動駕駛汽車發展現狀及趨勢分析[J].新材料產業,2020(4):51-53.
[2] 化祖旭. 自動駕駛汽車路徑跟蹤控制算法綜述[J].裝備制造技術,2021(6):100-103.
[3] 張琳. 自動駕駛車輛換道軌跡規劃方法研究[D].重慶:重慶交通大學,2021.
[4] 黃麗瓊. 基于制動/轉向的汽車主動避撞控制系統研究[D].南京:南京航空航天大學,2016.
[5] 張銳陳. 基于主動換道的緊急避障控制研究[D].合肥:合肥工業大學,2019.
[6] 張家旭,周時瑩,李長龍,等. 線控四輪轉向汽車自主代客泊車路徑規劃[J].中國機械工程,2022,33(8):993-1000.
[7] 楊博,張緩緩,江忠順. 基于模型預測控制的車輛避障路徑跟蹤控制仿真研究[J].智能計算機與應用,2020,10(12):99-103.
[8] 田圣哲,賀藝斌,竇勝月. 智能車軌跡跟蹤控制方法研究[J].汽車實用技術,2022,47(1):36-39.
[9] 胡杰,鐘鑫凱,陳瑞楠,等. 基于模糊LQR的智能汽車路徑跟蹤控制[J].汽車工程,2022,44(1):17-25,43.
[10] GUO H Y,CAO D P,CHEN H,et al.Model predictive path following control for autonomous cars considering a measurable disturbance:implementation,testing,and verification[J].Mechanical Systems and Signal Processing,2019,118:41-60.
[11] 劉帥鵬. 自動駕駛汽車路徑跟蹤與避障控制系統研究[D].南京:東南大學,2020.
[12] 高琳琳,唐風敏,郭蓬,等. 自動駕駛橫向運動控制的改進LQR方法研究[J].機械科學與技術,2021,40(3):435-441.
[13] 龔大為. 基于模型預測控制的自動駕駛汽車橫向控制策略研究[D].重慶:重慶交通大學,2021.
[14] 覃立仁,張成濤,楊航,等. 平行泊車路徑規劃與跟蹤控制仿真分析[J].廣西科技大學學報,2022,33(3):14-21.
[15] 魏民祥,嚴明月,汪,等. 基于路面識別的汽車緊急避撞控制算法[J].汽車安全與節能學報,2017,8(4):359-366.
[16] SLEDGE N H JR.An investigation of vehicle critical speed and its influence on lane-change trajectories[D]. Austin:The University of Texas at Austin,1997.
[17] 蔡瑞瑞. 車輛主動避障控制研究[D].西安:長安大學,2021.
[18] 梁忠超,張歡,趙晶,等. 基于自適應MPC的無人駕駛車輛軌跡跟蹤控制[J].東北大學學報(自然科學版),2020,41(6):835-840.
Simulation research on collision avoidance path planning
and tracking control of autonomous vehicle
YANG Hang, ZHANG Chengtao*, QIN Liren, ZHAO Zhedong
(School of Mechanical and Automotive Engineering, Guangxi University of Science
and Technology, Liuzhou 545616)
Abstract: Aimed at the scene of autonomous vehicle changing lanes to avoid collision on standard roads, we plan the collision avoidance path of autonomous vehicle through quintic polynomial and determine the coefficients of quintic polynomial according to the boundary conditions at the beginning and end of lane changing. We also determine the longitudinal lane changing safety distance with lateral safety constraints and consider the maximum lateral acceleration of lane changing path, ensuring the comfort in the process of automatic driving collision avoidance. Then we design the model predictive controller. We use the linear time-varying model to linearize the vehicle dynamics model and then discretize it. The designed objective function includes tracking error and control increment to ensure that the autonomous vehicle can complete the collision avoidance path tracking while consuming the least energy. We add the control quantity constraint, control incremental constraints and output constraints, enabling the designed path tracking controller to meet the physical constraints of the autonomous vehicle actuator. Finally, by establishing the joint simulation platform of Matlab and CarSim, we verify the effectiveness of the collision avoidance path planning and tracking control system designed under different working conditions.
Key words: automatic driving; path planning; quintic polynomial; model predictive control
(責任編輯:黎 婭)
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
領導決策信息(2018年50期)2018-02-22 06:17:16
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
光學精密工程(2016年6期)2016-11-07 09:07:19
作文大王·低年級(2016年4期)2016-04-18 00:24:37
中國工程咨詢(2016年4期)2016-02-14 07:28:28
