在多種制式機場跑道異物探測系統中告警準確率的研究
2023-07-20 00:12:18王嘯馬向勇章林張佳靜
無線互聯科技 2023年9期
王嘯 馬向勇 章林 張佳靜
摘要:隨著對機場跑道外來物的重視程度越來越高和航班量的大幅增加,傳統的人工巡查的方式已經不能完全滿足機場高效運行的要求。目前,國內已有多個機場安裝了機場跑道異物探測管理系統,其部署方式可分為邊燈式、塔架式、邊燈和塔架混合式等,但當前對系統和各個探測設備的準確率缺少有效的統計方法。在此基礎上,文章提出了一種在多種制式機場跑道異物探測管理系統中的告警準確率統計計算方法。實踐表明,該方法可以有效、準確、多維度地計算統計出各個探測設備、系統的告警準確率情況。
關鍵詞:FOD;邊燈式;塔架式;混合式;告警準確率
中圖分類號:V19
文獻標志碼:A
0 引言
外來物(Foreign Object Debris,FOD)即可能損傷航空器或系統的某種外來的物質、碎屑或物體[1]。隨著現在民用機場航班客運量的大幅增加,外來物掉落在機場的情況時有發生,任何在機場跑道飛行區內,可能會危及航空器地面安全運行的物體都屬于外來物。典型的外來物有:混凝土、瀝青碎塊、金屬零件、碎石子、橡膠輪子、塑料制品和動植物等。外來物對航空器的影響是巨大的,跑道上的外來物可能很容易被吸入發動機,導致發動機失效,或者被吸入一些別的機械裝置,影響航空器的正常運行,導致航班延誤、中斷起飛、關閉機場跑道、人員傷亡。因此,跑道上的外來物不僅會損害航空器,造成巨大的經濟損失,還會奪去寶貴的生命。
為了減少FOD的影響,提高機場的運行效率,國內已有多個機場安裝了機場跑道異物探測管理系統,其部署方式可分為邊燈式、塔架式、邊燈和塔架混合式、車載移動式等。
1 現狀及存在的問題
目前,北京大興機場3條跑道部署了邊燈式探測器,一條跑道部署的塔架式探測器,成都天府機場、鄂州花湖機場都是部署的邊燈式探測器。從設備的部署方式和業務處理流程的維度分析,可以把邊燈式、塔架式、邊燈和塔架混合式這3種制式的異物探測系統歸入一個通用的系統組成架構和業務處理流程。
2 主流的異物探測系統
在實際的系統中,各個探測器探測能力的一致性、設備的校準、參數設置和設備本身等問題都可能會影響探測異物的能力,進而導致整個系統出現誤警和漏警,其中漏警的影響是非常嚴重的。漏警會導致異物沒有得到及時處理,影響航空器、人員的安全。由于FOD探測設備和探測系統剛在國內建設和使用,當前還沒有對FOD探測設備和系統的漏警情況進行計算和統計分析的高效手段。因此,本文提出一種在邊燈式、塔架式、邊燈和塔架混合式、移動式這4種制式機場跑道異物探測系統中各個探測設備準確率的方法,能夠自動統計出各個探測設備、整個系統的漏警情況,便于及時發現和處理有問題的探測設備。
2.1 邊燈式異物探測系統
邊燈式異物探測系統主要是把探測器安裝在跑道的兩邊,依托毫米波雷達傳感器和光學傳感器對相應的跑道區域進行掃描探測,一般邊燈式探測設備部署間隔為60~120 m。在邊燈式探測系統中,一般先由雷達探測到目標,然后再進行取證拍照,在進行拍照取證的過程中,邊燈式探測設備是不進行雷達探測工作的。
2.2 塔架式異物探測系統
塔架式異物探測系統的探測設備一般安裝在離跑道150 m~200 m之外。正常的塔架式設備一般由塔架式雷達探測器和塔架式光電探測器兩個設備組成。若在純光學探測系統中,僅部署塔架式光電探測器。純光學的探測系統僅依靠光學傳感器對跑道區域進行周期性拍照掃描,然后對所有拍照的圖像進行目標檢測、識別工作。
2.3 邊燈和塔架混合式探測系統
邊燈式和塔機式探測設備大多是通過雷達探測發現目標,然后光學確認復核,或者通過純光學檢測發現。為了降低邊燈的安裝造價成本和維護時間成本,可以考慮在航空器起降的接地帶等重點區域安裝邊燈式設備,以近距離地檢測異物,同時保存相應的視頻信息;在非重點區域按照600 m~1 000 m的間隔安裝塔機式探測設備。
2.4 移動式異物探測系統
移動式異物探測系統就是把探測設備安裝在車輛上面,在跑道停航階段,可以把車輛開到跑道上進行工作。移動式異物探測系統在工作的過程中是一邊開車移動,一邊驅動探測設備進行檢測,若檢測到異物會立即通知工作人員現場核實處理[2]。
綜上所述,上面4類機場跑道異物探測系統各有特點。其中,移動式異物探測系統的價格最低,但是其工作的過程中,需要關閉跑道,不能對做跑道進行全天時、全天候的檢測。其他3類探測系統可以實時對跑道進行監控檢測,第一時間發現異物。邊燈式的設備需要安裝在跑道邊,其造價高,且每次維護都需要進入跑道,維護比較困難;塔架式設備造價稍低,但其受制于安裝位置和高度限制。邊燈和塔架混合式探測系統綜合了邊燈式和塔架式設備的優點,一般可以在接地帶等重點區域部署邊燈設備,在其他區域部署塔架式設備。
3 探測管理系統組成和處理流程
3.1 系統組成
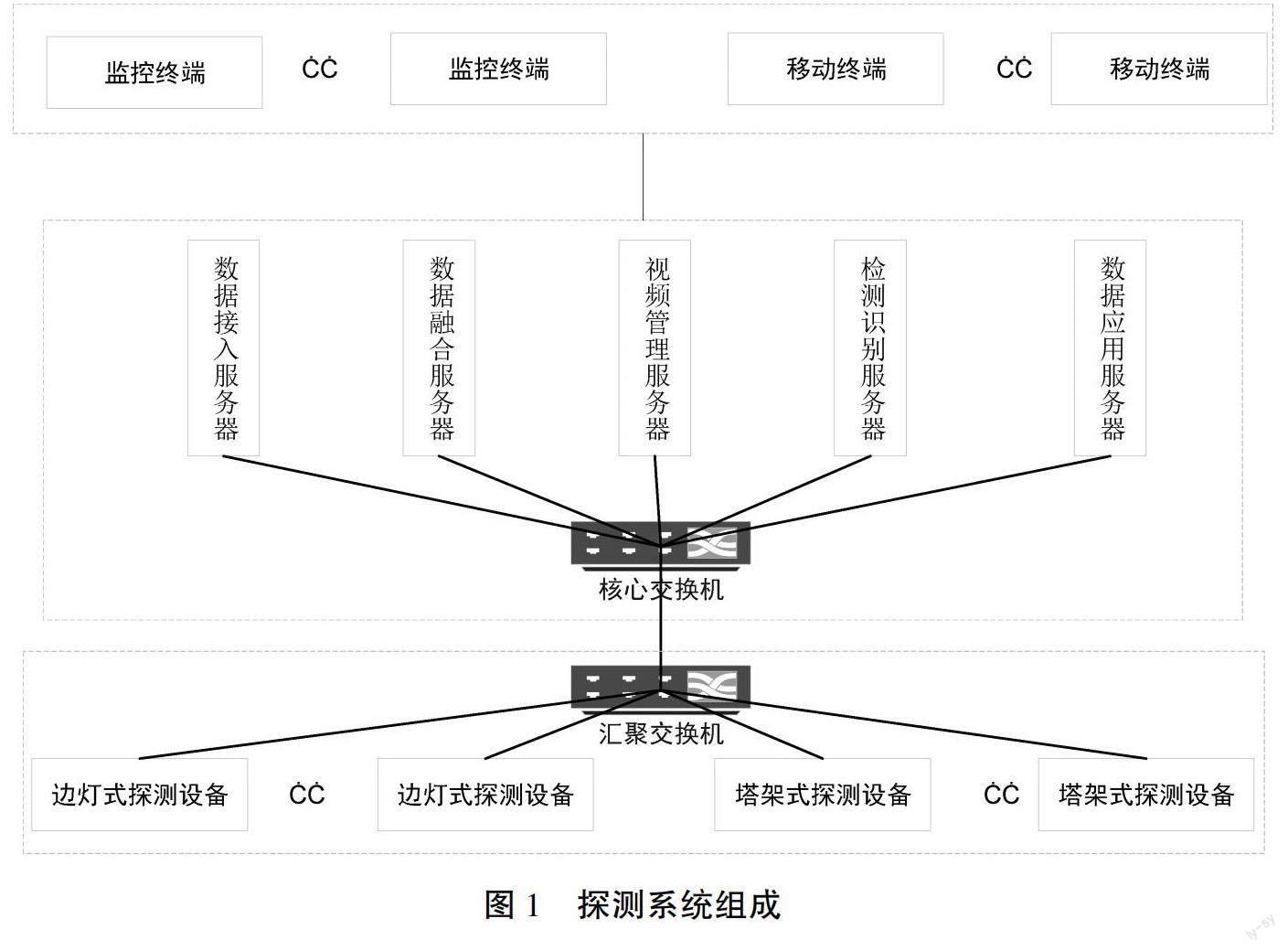
機場跑道探測管理系統一般由毫米波雷達、可見光攝像設備、交換機(包括匯聚交換機和核心交換機)、數據接入服務器、數據融合服務器、視頻管理服務器、檢測識別服務器、數據應用服務器、監控終端和移動終端等設備組成。毫米波雷達具備較高的距離、方位分辨率,同時穿透霧、煙、灰塵的能力較強,能夠全天時、全天候地監測機場跑道,精確地探測到跑道上的微小異物[3]。機場跑道探測管理系統的組成如圖 1所示。
其中,數據接入服務器具有連接雷達設備和可見光攝像設備、并管理連接設備的狀態和接收連接設備的上報數據功能,其主要功能是接收并轉發雷達(邊燈式和塔架式)上報的檢測異物目標信息。
數據融合服務器主要把數據接入服務器上報的檢測目標信息進行融合處理,并驅動數據接入服務器調動相應的可見光攝像設備去拍照。在實際探測設備的部署環境中,可能會進行冗余安裝部署,同一個檢測區域可能會被兩個或者兩個以上探測設備探測,即一個異物目標會被多個探測設備檢測到,數據中心接收到各個探測設備上報的異物目標數據后,結合目標尺寸和空間距離的屬性信息進行匹配、融合處理,形成融合告警,便于用戶查看和分析。
3.2 主要業務流程
機場跑道異物探測系統的業務流程主要包括異物探測、異物融合識別、異物報警、異物清理和數據管理。
3.2.1 異物探測
異物探測就是探測系統會全天時、全天候地對跑道的異物進行探測,包括使用雷達、光學等技術進行探測,并將探測結果傳輸到數據中心進行探測目標信息處理。
3.2.2 異物融合識別
異物融合識別就是將各個探測設備上報的異物目標信息進行融合,由于對同一個異物被多個探測設備探測到的目標信息進行融合,同時驅動相應的可見光設備進行取證拍照,并通過圖像處理技術進行類別自動識別、計算異物的尺寸信息等,以便確定異物的告警等級、位置(一般會定位到道面的板塊編號)等屬性。
3.2.3 異物報警
異物報警就是當發現新的異物目標時,機場跑道異物探測系統會自動觸發聲光報警,并在系統的地圖頁面中顯示異物所在的位置,通過多種方式提示用戶及時確認和處理。
3.2.4 異物清理
異物清理就是用戶根據探測管理系統的提示信息,把指定的異物信息通過移動終端下發給相應的清理工作人員。清理工作人員根據移動終端導航到異物所在的具體位置,進行異物清理工作。其中,一般移動終端是支持現場拍照取證的操作,系統可以對整個異物的處理流程進行全程記錄[4]。
3.2.5 數據管理
數據管理就是整個系統會自動記錄所有的探測結果和清理記錄信息,可隨時查詢、分析數據,以便于用戶對系統進行維護和工作的改進,并為日后的管理效率提升和決策提供數據支持。
4 異物告警準確率統計計算
4.1 部署模型構建
邊燈式、塔架式、邊燈和塔架混合式的探測管理系統都是基于實際的機場數據來建立機場跑道數據模型,可以通過專業的團隊進行測繪,形成自己的GIS服務,或者根據公開的地圖數據(比如:百度地圖、谷歌地圖等)和機場的CAD數據文件生成平面二維地圖。
在部署現場采集邊燈式、塔架式探測設備的實際經緯度坐標信息,構建探測設備部署數據模型,其坐標信息一般是基于世界大地測量系統坐標系(World Geodetic System-1984 Coordinate System,WGS84)。在系統運行過程中,各個探測設備定時周期性掃描,并上報異物目標數據,異物目標數據主要包括:目標尺寸、目標發現時間、距離、角度、探測設備ID等信息。系統通過異物目標相對于探測設備的距離和角度等信息,并結合探測設備當前的經緯度信息,就可以計算出異物目標的經緯度坐標信息,同時會把異物目標直觀地顯示在跑道的地圖中。
4.2 準確率統計計算流程
4.2.1 確認異物告警
在系統的實際運行過程中,有兩個途徑可以確認FOD信息,分別為:探測管理系統發現,且人工確認為真實的FOD;探測管理系統未發現,通過人工巡查或者其他方式發現的FOD信息。在本文中需要把所有確認FOD的經緯度和發現時間信息錄入系統。
4.2.2 查找關聯設備
系統自動根據錄入的確認FOD的經緯度和時間信息,并結合各個探測設備的探測能力等數據進行匹配,計算出每個FOD應歸屬的探測設備。計算確認的FOD同各個探測設備的距離d(單位為m)的計算公式如下:
d=111.12cos{1/[sin? Asin? B+cos? Acos? Bcos(λB-λA)]}
其中,λA和? A分別為FOD的經度、緯度;λB和? B分別為探測設備的經度、緯度;然后同系統部署中的探測設備探測能力半徑進行比較,如果FOD同探測設備的距離小于探測設備的探測能力半徑,就判定所述FOD的位置應歸屬的探測設備,否則就不歸屬。
在實際安裝部署環境中,可能會進行冗余安裝部署,所以可能會出現一個確認的FOD會在多個探測設備的探測能力范圍內,即應該被多個探測設備探測到。系統會對確認的FOD在其探測能力范圍內,但未發現該FOD的探測設備的漏警次數加1。另外,若一個確認的FOD沒有被任何一個探測設備檢測到,則認為系統出現一次漏警。
4.2.3 準確率統計分析
機場跑道探測管理系統可以根據相應周期的策略(可以按日、周、月、半年、年、跑道和整個系統)進行多維度的統計分析,形成相應的探測設備、跑道和系統的漏警數據報表,可以支持用戶通過餅圖、柱狀圖或者曲線圖等多種方式查看和分析。
5 結語
本文設計出一種能夠同時滿足邊燈式、塔架式、邊燈和塔架混合式多種制式機場跑道異物探測管理系統架構和業務流程,并提出了一種在這3類制式機場跑道異物探測系統中的告警準確率統計計算方法。該系統架構和告警準確率的計算方法已經在淮安機場運行近兩年,實踐表明該方法可以有效、準確、多維度地計算出各個探測設備、系統的告警準確率情況。該方法可以及時發現有問題的設備,便于及時處理,降低系統的漏檢率,提高系統維護人員的工作效率,為提高機場跑道運行效率提供有效的保證。
參考文獻
[1]國家民航總局機場司民航局安全技術中心.FOD防范手冊[EB/OL].(2009-03-31)[2023-05-21].https://www.docin.com/p-64463281.html.
[2]王瑾.一種混合制式機場跑道異物探測系統[J].科技視界,2019(9):16-18.
[3]王宏哲.用于機場場面目標監視的高分辨FMCW[J].現代雷達,2010(7):21-23.
[4]李莎,李春娟.機場跑道異物檢測系統設計與算法研究[J].現代雷達,2021(43):80-84.
(編輯 王雪芬)
Research on alarm accuracy in multiple standard airport runway foreign object detection systemWang Xiao1, Ma Xiangyong1, Zhang Lin1, Zhang Jiajing2
(1.Nanjing LES Electronic Equipment Co., Ltd., Nanjing 210000, China;
2.Nanjing LES Information Technology Co., Ltd., Nanjing 210000, China)
Abstract: With more and more attention to foreign object debris and a large increase in the number of flights, the traditional manual inspection has been unable to fully meet the requirements of efficient operation of the airport. At present, many domestic airports have installed detection management system, which can be divided into edge-light type, tower type, hybrid detection. But at present, there is a lack of effective statistical methods for the accuracy of the system and each detection device. On this basis, this paper presents a statistical calculation method of alarm accuracy in multiple standard airport runway foreign object detection management system. Finally, the actual results show that this method can calculate and calculate the alarm accuracy of each detection device and system effectively, accurately and multidimensional.
Key words: FOD; edge-light type detection system; tower type detection system; hybrid detection system; alarm accuracy
