脫插機構(gòu)的誤差靈敏度分析與優(yōu)化設(shè)計
2023-07-22 08:05:34孫繼紅武令偉
艦船科學技術(shù) 2023年11期
孫繼紅,武令偉,陳 冰
(1. 海軍裝備部武漢局駐鄭州地區(qū)軍事代表室,河南 鄭州 450015;2. 中國船舶集團有限公司第七一三研究所,河南 鄭州 450015)
0 引 言
精密機械系統(tǒng)在裝配組裝過程中,零件的加工誤差和裝配誤差不斷累積,勢必會影響精密機械系統(tǒng)的性能指標。如何系統(tǒng)量化分析零部件的加工誤差與裝配誤差對整個多體系統(tǒng)的精度影響,對整個系統(tǒng)的可靠性起著關(guān)鍵作用[1]。針對該問題,國內(nèi)外學者進行了大量研究。呂程等[2]以裝配結(jié)合平面為研究對象,分析了多種公差耦合情況下零件間裝配結(jié)合面誤差建模和公差優(yōu)化設(shè)計問題。楊強等[3]應(yīng)用差分法分析了并聯(lián)機構(gòu)位置誤差對主要設(shè)計變量的靈敏度的影響。趙強等[4]用矩陣微分法推導(dǎo)了位姿誤差和原始誤差之間的關(guān)系式,給出了按靈敏度的比例對原始誤差進行綜合優(yōu)化的方法。唐水龍等[5]針對配合面尺寸公差與平面度公差構(gòu)建虛擬配合面進行了誤差耦合分析。范晉偉等[6]提出了一種基于多體系統(tǒng)運動學理論的機床誤差靈敏度分析新方法,提出了矩陣微分法的靈敏度分析模型。
雷彈發(fā)射箱脫插機構(gòu)是雷彈貯運發(fā)射箱的重要組成部分,完成發(fā)控專用電纜與箱、雷之間的連接與導(dǎo)通,用于雷彈和反潛武器系統(tǒng)之間信號傳輸,并在雷彈發(fā)射時,確保雷箱之間的電連接器可靠快速地自動分離,為雷彈正常出箱提供發(fā)射通道,是保證雷彈正常發(fā)射的重要組件。由于脫插機構(gòu)既要保證發(fā)射箱與雷之間精準對接和發(fā)射時可靠快速的自動分離,又不干涉到正在出箱的雷彈,因此對脫插機構(gòu)與雷彈之間的相對位置精度要求極高,對脫插機構(gòu)各零部件的加工精度以及裝配精度提出了較高的要求。本文以某型雷彈貯運發(fā)射箱脫插機構(gòu)為研究對象,建立脫插機構(gòu)多體系統(tǒng)的誤差傳遞模型,并對影響其精度的因素進行靈敏度分析,進而確定關(guān)鍵誤差來源,為整個系統(tǒng)的誤差優(yōu)化分析提供可靠的理論支撐。
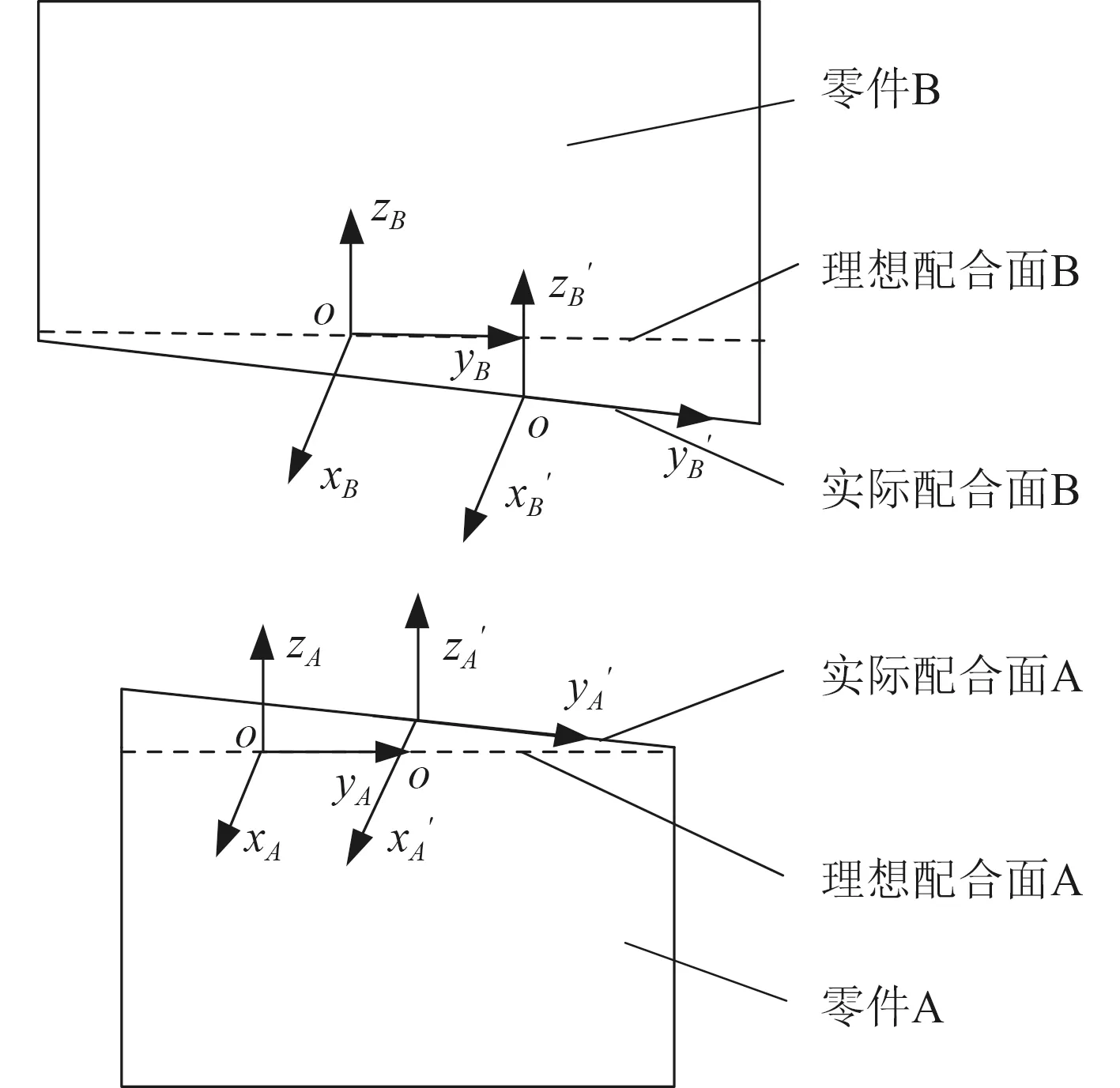
圖1 配合面誤差專遞模型Fig. 1 Matching surface error transformation model
1 多體系統(tǒng)幾何誤差傳遞模型
1.1 誤差描述
任何多體系統(tǒng)都由若干個零件裝配而成,組成多體系統(tǒng)的零部件在加工和裝配的過程中不可避免都存在一定的誤差。整個多體系統(tǒng)隨著一個個零件的裝配,零件本身的加工誤差和裝配過程中產(chǎn)生的裝配誤差,將會出現(xiàn)誤差不斷疊加和增大現(xiàn)象,進而對整個多體系統(tǒng)的工作性能產(chǎn)生較大影響,因此控制多體系統(tǒng)幾何誤差疊加對多體系統(tǒng)性能起著至關(guān)重要的作用。
為了便于分析多體系統(tǒng)的幾何誤差疊加,需要建立多體系統(tǒng)的幾何誤差傳遞模型,通常將零件的加工誤差和裝配誤差用向量 [Δα Δβ Δγ ΔxΔyΔz]表示,其中 Δx, Δy, Δz表示在右手直角坐標系Oxyz各方向上的線位移誤差, Δα , Δβ , Δγ表示角位移誤差[7]。
現(xiàn)將兩個相互配合的零件設(shè)為A 和B,分別在其相互配合的理想幾何表面中心建立右手坐標系,oxAyAzA和oxByBzB,相對于理想幾何表面的實際幾何表面建立坐標系分別為oxA′yA′zA′’和oxB′yB′zB′[8–9]。
其中坐標系oxA′yA′zA′相對于oxAyAzA,存在3 個角位 移 誤 差 Δα , Δβ , Δγ 和3 個 線 位 移 誤 差 Δx, Δy,Δz。2 個坐標系的齊次變換矩陣為:
由于精密系統(tǒng)的各個誤差數(shù)值很小,令式(1)中cosΔα ≈1, cosΔβ ≈1, cosΔγ ≈1,sinΔα ≈Δα, sinΔβ ≈Δβ ,sinΔγ ≈Δγ,同時忽略高階小量,則齊次變換矩陣可表示為:
坐標系oxAyAzA中 的向量在坐標系oxA′yA′zA′可表示為:
為了便于區(qū)分不同零件間的變換矩陣,令
同理可得,oxByBzB相對于oxB′yB′zB′齊次變換矩陣為TB,oxAyAzA相 對于oxByBzB齊次變換矩陣為TAB,oxA′yA′zA′相對于oxB′yB′zB′齊次變換矩陣為根據(jù)坐標變換關(guān)系,并且忽略高階小量,可得理想面A 相對于理想面B 的坐標變換矩陣為:
坐標系oxByBzB上的向量pb在坐標系oxAyAzA中可表示為:
1.2 脫插機構(gòu)多體系統(tǒng)坐標系定義和變換
發(fā)射箱脫插機構(gòu)的多體系統(tǒng)簡化結(jié)構(gòu)如圖2 所示。脫插機構(gòu)與雷彈對接時,只有脫插機構(gòu)內(nèi)部機構(gòu)在運動,因此在進行誤差分析時,可將脫插機構(gòu)基座與發(fā)射箱考慮為一個整體,并在脫插機構(gòu)基座上建立以雷彈發(fā)射方向為x軸,以脫插機構(gòu)對接方向為z軸建立基本坐標系o-xyz,將脫插機構(gòu)下連桿座定義為剛體1;脫插機構(gòu)平動桿視為剛體2;脫插機構(gòu)上連桿座視為剛體3;電插頭視為剛體4,可以建立脫插機構(gòu)對應(yīng)的多體系統(tǒng)拓圖如圖3 所示。
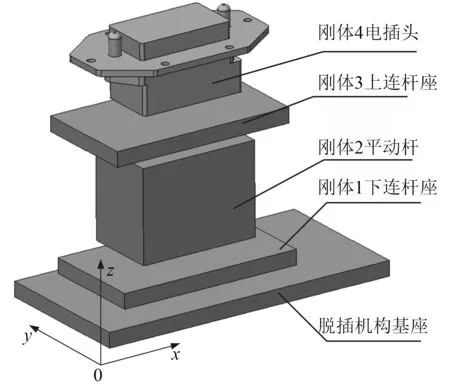
圖2 發(fā)射箱脫插機構(gòu)結(jié)構(gòu)簡化圖Fig. 2 Simplified structure diagram of launch canister insert-draw
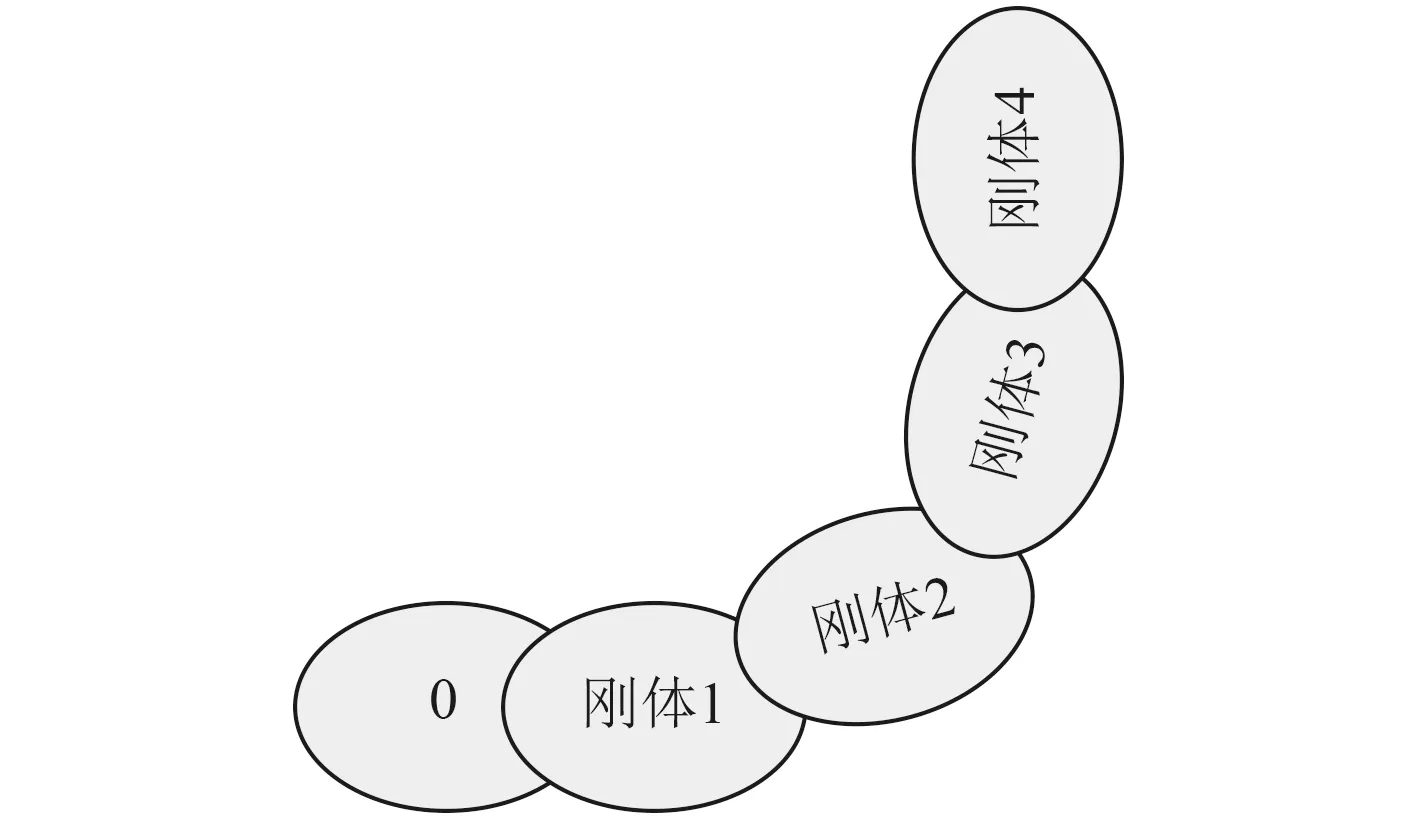
圖3 發(fā)射箱脫插機構(gòu)拓撲圖Fig. 3 Topological diagram of launch canister insert-draw
令TU1,TU12,TU23,TU34分別看作為脫插機構(gòu)連桿座(剛體1)相對于脫插機構(gòu)基座及剛體1 與剛體2、剛體2 與剛體3、剛體3 與剛體4 對應(yīng)的理想配合面,坐標齊次變換矩陣分別為TU1,TU12,TU23,TU34;由脫插機構(gòu)各個零件的幾何尺寸確定各個零件自身2 個理想配合面的相對位置關(guān)系,用T1,T2,T3和T4分別表示剛體1、剛體2、剛體3 和剛體4 自身2 個理想配合面的坐標齊次變換矩陣。
假設(shè)整個脫插機構(gòu)各個配合面之間不存在加工誤差和裝配誤差,則向量m4在 基本坐標系o-xyz中可表示為:
向量m4的總體誤差矢量可以表示為:
TU04為脫插機構(gòu)組裝后的總體誤差坐標齊次變換矩陣,可表示為:
1.3 脫插機構(gòu)靈敏度分析模型
假設(shè)X為脫插機構(gòu)裝配后的總體誤差矢量, ΔxX,ΔyX, ΔzX, Δ αX, Δ βX, Δ γX分別為函數(shù)X的6 個誤差分量,因此可得
其中,X為系統(tǒng)的空間誤差矢量,Uk為誤差矢量。
根據(jù)一階靈敏度函數(shù)的定義,假設(shè)函數(shù)F(x)可導(dǎo),則F(x)的一階靈敏度可表示為:
由脫插機構(gòu)誤差傳遞模型可知,X是Uk各個誤差變量的連續(xù)可微函數(shù),因此可得脫插機構(gòu)的誤差靈敏度分析模型為:
式中:Ek=?f/?Uk為對應(yīng)變量的靈敏度系數(shù),因此,可以計算求出每一個誤差分量對系統(tǒng)總裝誤差的靈敏度系數(shù),即Ek=?f/?Uk為誤差靈敏度系數(shù)矩陣:
根據(jù)式(11)可以快速的計算各誤差的靈敏度系數(shù)。同時為了快速的找到關(guān)鍵誤差,對各個靈敏系數(shù),進行了歸一化處理可得[10]:
式中:Ck代表誤差Uk各誤差分量的靈敏度系數(shù),而全部靈敏度系數(shù)之和為1。
2 脫插機構(gòu)總體誤差分析
2.1 誤差矢量計算
首先,測量脫插機構(gòu)各關(guān)鍵零部件配合面的多個點尺寸,經(jīng)計算擬合分析,再通過式(4)計算得出各配合面的相對誤差矢量如表1 所示。
表1 各配合面的相對誤差矢量Tab. 1 Relative error vector of each mating surface
將表1 中的數(shù)據(jù)代入式(8)和式(9),經(jīng)計算可得脫插機構(gòu)總體相對誤差矢量如表2 所示。

表2 脫插機構(gòu)總體相對誤差矢量Tab. 2 Overall relative error vector of insert-draw
表2 中脫插機構(gòu)總體相對誤差矢量在3 個方向的線位移誤差分別為:1.920 8 mm,0.504 1 mm 和-0.756 8 mm,3 個方向的角位移誤差分別為:-0.006 5,0.034 1 和0.006 2。
通過對脫插機構(gòu)多個對接失敗的案例進行統(tǒng)計分析發(fā)現(xiàn),造成脫插機構(gòu)對接失敗的主要因素為脫插機構(gòu)的電插頭,在z軸方向和x軸方向上誤差過大。當誤差為正時,會使電插頭上升到最高位置尚不能完全插入雷彈電插座中;當誤差過小時會使電插頭還沒有旋轉(zhuǎn)至豎直對接位置時,電插頭的導(dǎo)向銷已和雷彈上電插座干涉,以致因插座的阻擋不能繼續(xù)執(zhí)行對接操作,導(dǎo)致對接失敗。因此,為了減少計算量主要關(guān)注誤差分量在x軸、y軸和z軸方向上的靈敏度系數(shù)。根據(jù)式(15)求得脫插機構(gòu)各誤差分量分別在x,y,z方向上靈敏度系數(shù),并根據(jù)式(16)進行歸一化處理,并取靈敏度系數(shù)最大的3 項,可得表3。
表3 各誤差分量在x,y,z 軸方向上的誤差靈敏度系數(shù)Tab. 3 Error sensitivity coefficient of each error component in x, y and z axes
2.2 關(guān)鍵因素確定
考慮脫插機構(gòu)對接失敗的主要原因可能來自于x軸方向和z軸方向的誤差,根據(jù)表3 中的各誤差靈敏度系數(shù)可知,影響脫插機構(gòu)x軸方向和z軸方向的誤差的主要影響因素為 Δβ1, Δβ12和 Δ β23,即將脫插機構(gòu)下連桿座和脫插機構(gòu)基座之間沿y軸方向的轉(zhuǎn)動誤差;下連桿座和平動桿之間沿y軸方向的轉(zhuǎn)動誤差;平動桿和上連桿座之間沿y軸方向的轉(zhuǎn)動誤差。因此考慮針對上述3 項誤差提出改進方案,進而提高脫插機構(gòu)的對接成功率。
3 措施制定及試驗驗證
3.1 措施制定
針對計算分析的結(jié)果,根據(jù)分析出的原因,通過提高脫插機構(gòu)下連桿座和脫插機構(gòu)基座之間、下連桿座和平動桿之間、平動桿和上連桿座之間配合面沿x軸方向的平面度要求(即降低沿y軸方向的轉(zhuǎn)動誤差)以及裝配間隙的均勻性,進而降低 Δβ1, Δ β12和Δβ23的數(shù)值從而降低x軸方向和z軸方向的誤差,將Δβ1, Δ β12和Δ β23進行調(diào)整,如表4 所示。
表4 優(yōu)化后各配合面的相對誤差矢量Tab. 4 The relative error vector of each mating surface after optimization
對脫差機構(gòu)各配合面優(yōu)化后,計算系統(tǒng)整體誤差矢量,同時測量實際誤差并與優(yōu)化前的誤差矢量進行對比,如表5 所示。

表5 優(yōu)化前后脫插機構(gòu)總體相對誤差矢量Tab. 5 Optimize the overall relative error vector of the front and rear insert-draw
3.2 試驗驗證
在試驗現(xiàn)場,將優(yōu)化設(shè)計并檢驗合格后的脫插機構(gòu)安裝到發(fā)射箱中,將模擬雷彈推入發(fā)射箱中,用固彈機構(gòu)鎖定。操作脫插機構(gòu),使平動桿帶動電插頭到待插狀態(tài),測量電插頭前導(dǎo)向銷中心到雷上插座導(dǎo)向孔中心在z軸方向上的偏差為0.5 mm,沿x軸方向上的偏差為0.8 mm,沿y軸方向上的偏差為0.5 mm,如圖4 所示。
圖4 發(fā)射箱上電插頭和雷彈插座相對位置示意圖Fig. 4 Schematic diagram of relative position of electric plug and torpedo-missile on launch canister
操作脫插機構(gòu)使電插頭升起,成功插入雷體插座中。用萬用表對發(fā)射箱箱壁外側(cè)的插座和模擬雷上插座的導(dǎo)通情況進行檢測,所有芯線均導(dǎo)通正常。操作固彈機構(gòu)解鎖模擬雷后,用手推動模擬雷向前運動,脫插機構(gòu)電插頭和雷上插座成功分離,并被脫插機構(gòu)內(nèi)鎖定-解鎖機構(gòu)鎖定。重復(fù)操作以上步驟100 次,其中,100 次插接功能都順利完成,在對接成功的100 次操作中隨機抽取幾根芯線檢測,也均導(dǎo)通正常。對接成功率為100%,對比優(yōu)化前85%的成功率有了較大提高,進一步驗證了措施的有效性。
4 結(jié) 語
針對發(fā)射箱脫插機構(gòu)與雷彈對接成功率較低容易失敗的問題,本文通過建立發(fā)射箱脫插機構(gòu)的誤差傳遞模型,對脫插機構(gòu)進行靈敏度分析,確定影響脫插機構(gòu)對接精度的關(guān)鍵誤差來源,為整個系統(tǒng)的誤差優(yōu)化分析提供理論支撐,從而提出針對性的改進措施并加以實施。最后通過試驗驗證了誤差分析的有效性以及改進措施的正確性,最終解決了脫插機構(gòu)對接成功率低的問題。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
計算機應(yīng)用(2022年2期)2022-03-01 12:33:42
計算機應(yīng)用(2022年1期)2022-02-26 06:57:42
計算機應(yīng)用(2021年4期)2021-04-20 14:06:36
計算機應(yīng)用(2021年3期)2021-03-18 13:44:48
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
計算機應(yīng)用(2021年1期)2021-01-21 03:22:38
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34