噴水推進船舶二維控制手柄優化設計
2023-07-22 08:05:38孟堃宇
艦船科學技術 2023年11期
陳 穎,趙 楠,孟堃宇
(1. 海軍裝備部駐上海地區第八軍事代表室,上海 200011;2. 中國船舶及海洋工程設計研究院,上海 200011)
0 引 言
噴水推進船舶普遍采用一種集首向操縱和正/倒車控制功能于一體的二維手柄,其很好融合了噴水推進操縱性能佳、機動性高的優點,具有無級調節、控制精度高、可切換多操縱模式的技術特點,能夠適應大多數場景的船舶操縱需求[1]。但針對一些特定情況的操縱要求,如提升小舵角范圍以及多工況的操縱感,增加緊急停車功能等,現有二維手柄無法直接實現,且需要操船人員具有相當的經驗。為此在現有二維手柄操縱系統的基礎上,對其硬件結構和控制策略開展優化設計,以實現新的功能,提升駕控體驗。
1 結構和控制原理
噴水推進依靠吸入與噴射水流的動量差產生推力,并經由安裝在噴口后方的操舵倒航機構偏折高速噴射流從而產生船舶操舵力和倒車力。由于這種噴射流是矢量流,可以通過控制噴水推進裝置的方向舵舵角、倒航斗位置和主機轉速的方式調節該矢量流的大小、方向,進而調節船舶的航行姿態[2]。噴水推進船舶二維手柄操縱系統基于對上述這些獨立且連續變化參數的控制實現船舶操縱。
圖1 為一種通用型噴水推進二維手柄控制單元,主要包括:1)轉舵系統,手柄本體繞垂直于水平面的Z軸旋轉至左、右最大舵角(一般為±30°),對噴水推進的方向舵實施指令控制,實現對船舶首向的操縱;2)推進系統,手柄操縱桿繞與紙面垂直的Y軸向前或向后推進多個檔位(一般為±5 檔,也可參考螺旋槳推進改為-3~+5 檔),同時對倒航斗位置和主機轉速實施聯合指令控制,實現對船舶的正/倒航、加/減速等的操控。除上述兩大系統外,還包括指示燈、顯示屏、功能按鍵等附屬結構。
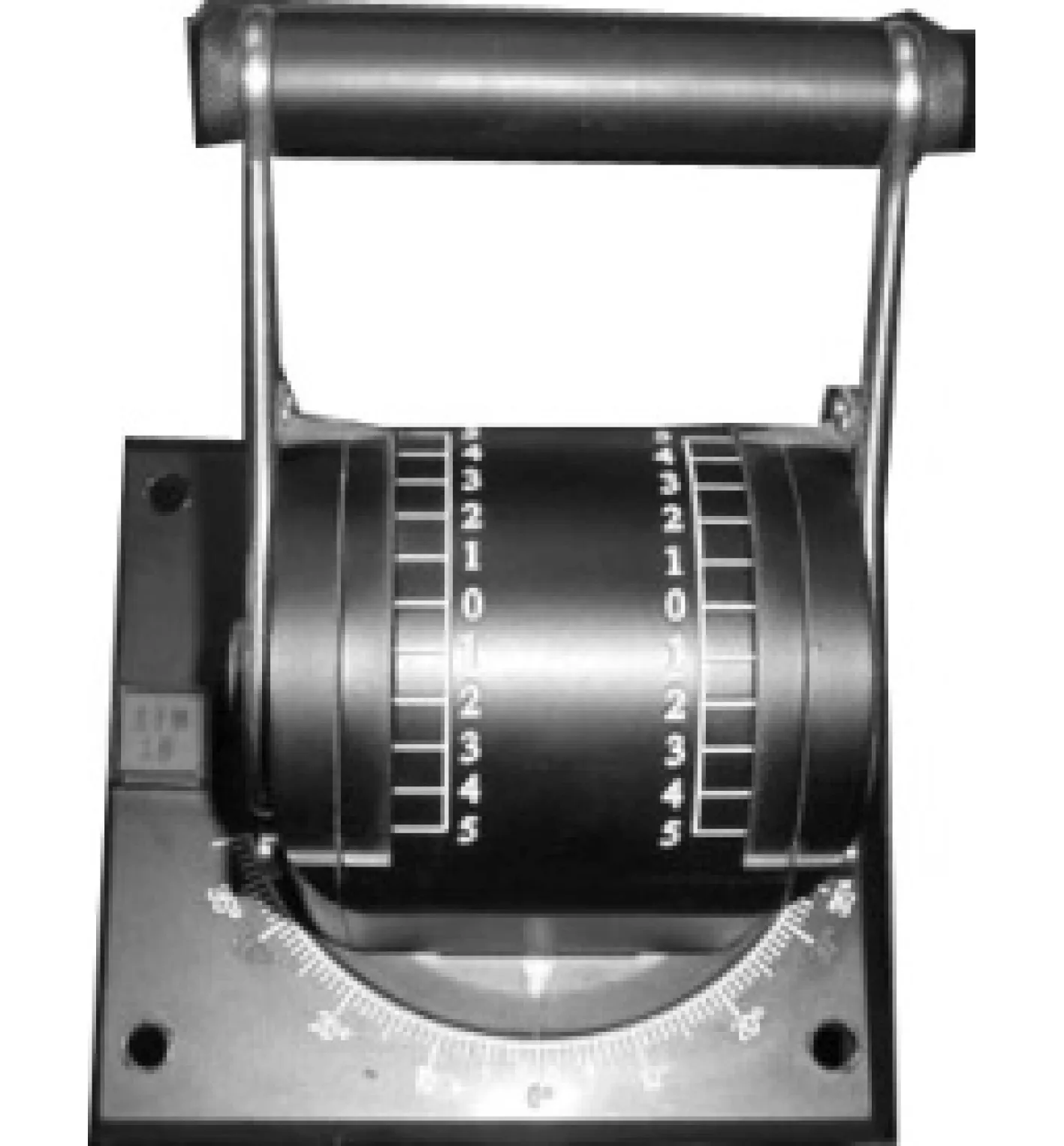
圖1 一種二維手柄操縱單元Fig. 1 Two-dimensional handle control unit
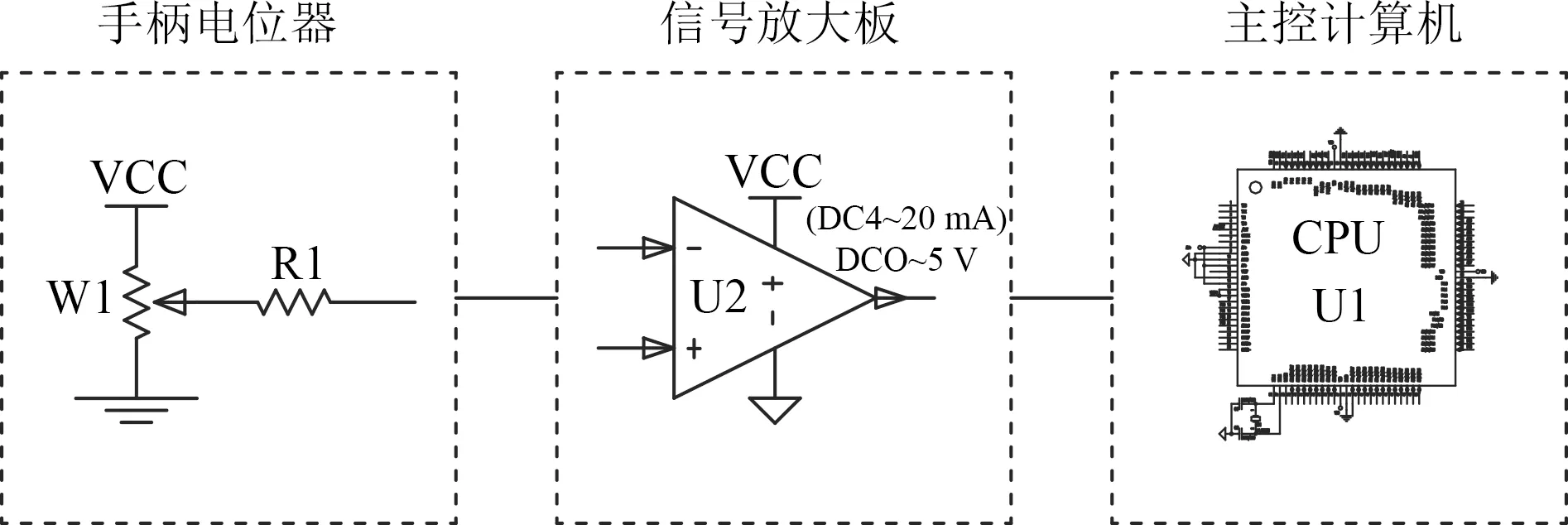
圖2 手柄操舵/斗指令信號傳遞原理框圖Fig. 2 Principle diagram of steering and reversing control signals transmission
在電氣控制原理方面,手柄操縱單元接收駕駛員物理指令后,會向主控計算機發送操縱指令信號。操舵和倒斗-主機指令兩路信號由手柄內部旋轉電位器經分壓產生,并經過信號放大板轉換為DC0~5 V 電壓或DC4~20 mA 電流輸出標準信號。該信號直接傳輸至主控計算機AD 信號采樣口,作為操舵或操斗和主機轉速的聯合控制輸入信號使用。主控計算機根據預設的控制策略程序將信號進一步解算為實際舵角、倒斗位置和主機轉速需求,進一步發送至底層控制器驅動系統動作,形成完整的控制閉環[3]。
2 功能優化
本文對二維手柄操縱系統的功能優化設計基于目標船的實際需求開展:1)有在狹窄的航道內航行的需求,但由于噴水推進轉舵響應靈敏,為防止誤操作導致船體碰壁,希望能提升小舵角范圍內(≤6°)的操縱體驗;1)有多工況和緊急停車的操縱需求,手柄要兼顧最高航速、巡航、低速航行等工況,且在特殊狀態下能實現緊急停船。
2.1 小舵角優化
噴水推進裝置舵角運動范圍為±30°,在二維手柄單元上的操舵指令行程范圍為120°,如圖1 所示。因指令放大倍數僅2 倍,在駕駛過程中,會存在因操縱過猛而導致出現大舵角的情況,這對于狹窄航道內航行比較危險。考慮到若再加倍拓寬操舵行程的范圍(擴大至240°)會導致手柄駕控體驗變差,故最后采取的措施是僅加倍小舵角(≤6°)的指令范圍但不改變總行程的設計方案。分別從操舵策略曲線和手柄刻度指令兩方面實施[4]:如圖3(a)所示,策略曲線中橫坐標為手柄操舵指令輸入量,縱坐標為實際操舵指令。原始曲線(虛線)為直線,即輸入20%時,指令也為20%。現優化加倍小舵角后(實線),將前12 輸入值對應的輸出值減小一半至6,相當于拓寬了指令輸出20%以內的操縱范圍,而后面斜率加大,舵角變化加快;另一方面,策略曲線調整后手柄刻度也許進行調整,由于二維手柄中指令刻度與電位器輸出值是線性對應的,故只需要修改刻度盤即可,如圖3(b)所示。

圖3 手柄操舵曲線和刻度盤Fig. 3 Modifications on the steering curve and handle dial
2.2 多工況優化
根據任務需求本船存在最大航速、正常巡航、低速航行、駐航、怠速倒車和全速倒車等多種工況,希望在手柄檔位中得到體現。手柄控制單元的檔位設計參考螺旋槳推進的慣例,采用進5 檔、零位和倒3 檔的方案,共9 檔。各重要推進工況和檔位分布如表1所 示。
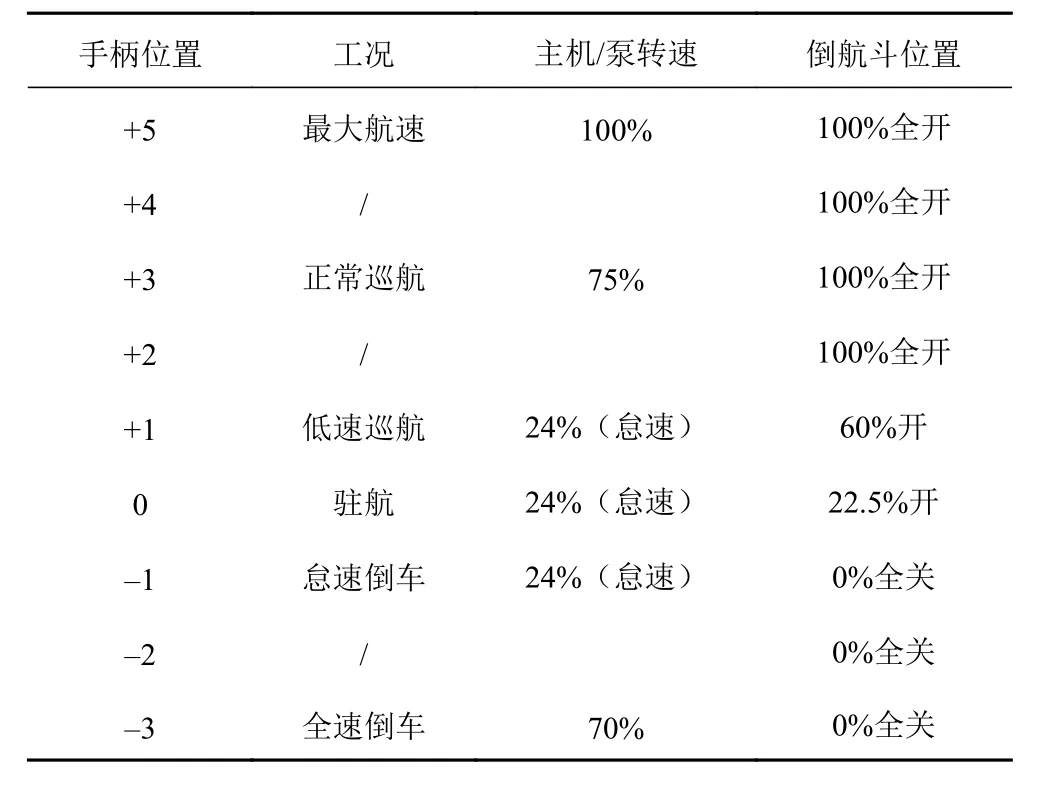
表1 倒航斗與轉速聯合控制曲線Tab. 1 Reversing bucket and rotation rate control curve
各推進工況受噴水推進倒航斗位置和轉速2 個參數同時控制,為簡化用戶操作,通常將這2 個參數采用聯控策略曲線的方式控制。根據噴水推進航行特性預報的結果,得到各工況下的轉速和倒航斗位置情況(見表1),并繪制了聯控曲線,如圖4 中的“正常”曲線。在手柄推至“+2”和 “+4”檔的過程中,曲線均采用直線過渡。
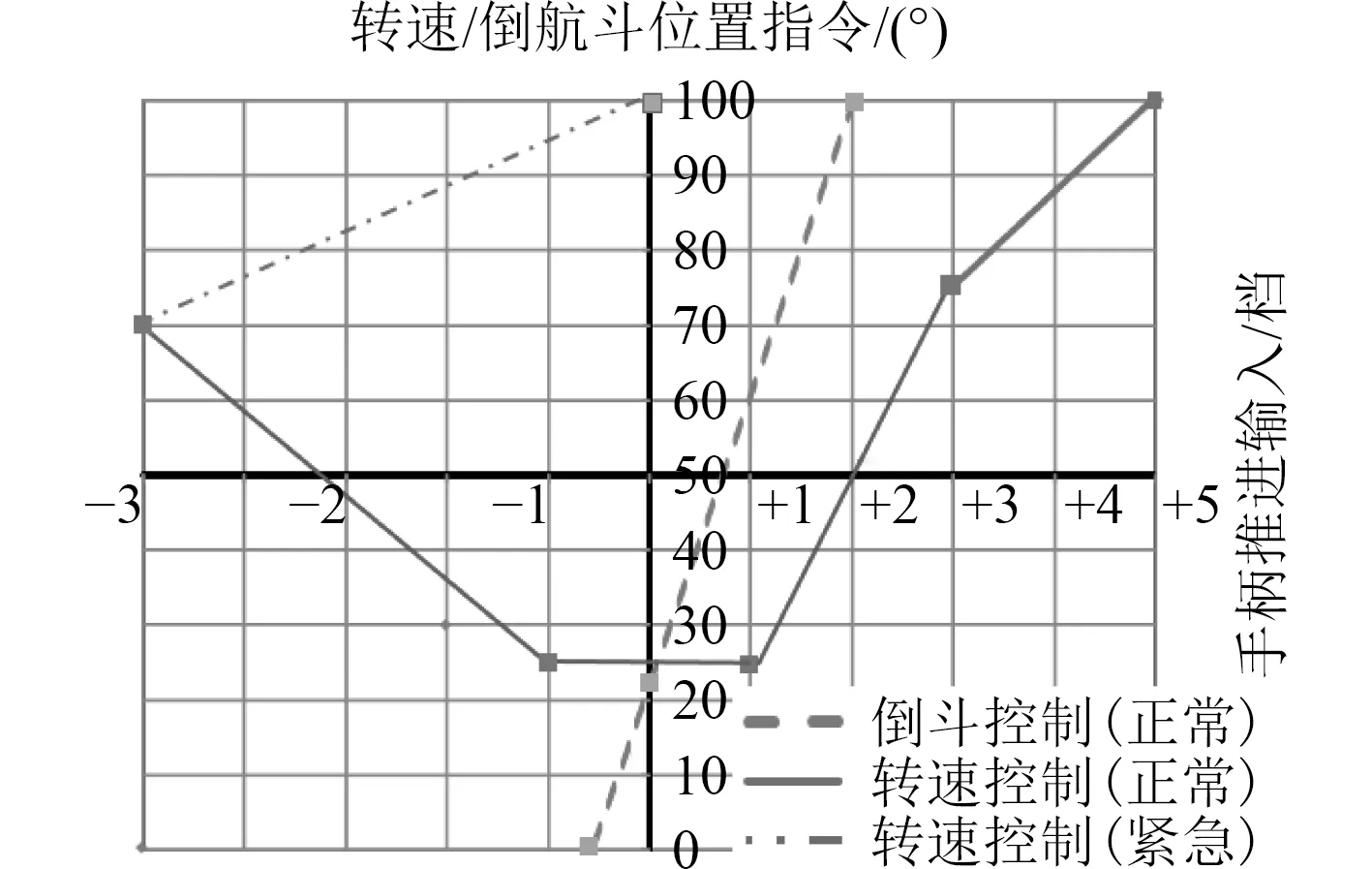
圖4 手柄正常推進和緊急停車聯合控制曲線Fig. 4 Control curve under normal propulsion and emergency stop condition
通過上述優化,手柄操控系統已能夠滿足多工況推進的要求,根據實船試航結果還要對曲線進行微調。最后,為進一步提高多工況的操控體驗,在重要檔位加入了“指令反饋”結構:對二維手柄推進系統的轉動副增加了一種彈簧滾珠結構,如圖5 所示。轉動副由推桿和基座構成,在基座上均勻布置數個彈簧滾珠結構;通常狀態下可以作為軸承支撐推桿在基座上轉動;在推桿上設計3 個凹坑,當滾珠運動進入凹坑后,操作者將獲得反饋,表示此時手柄已處于重要檔位,提升了駕控體驗。
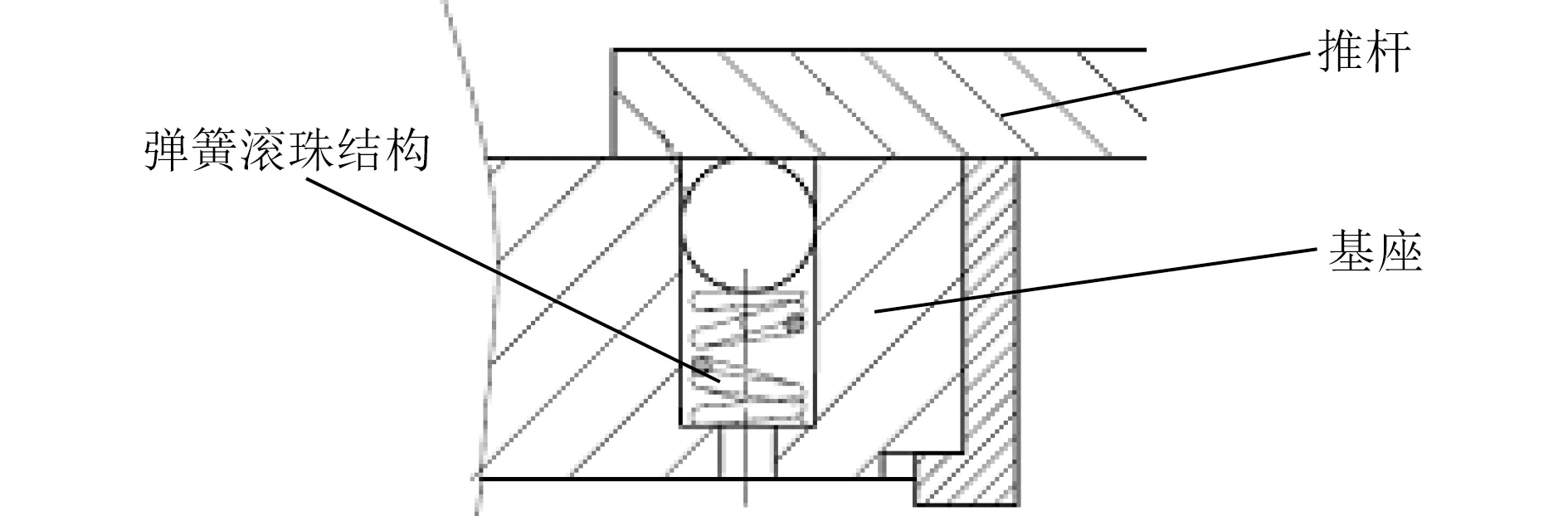
圖5 手柄指令反饋結構Fig. 5 Instruction feedback structure
2.3 緊急停車
通常情況下,為了保護船體結構和船上人員安全,在噴水推進船的降速過程中均采用圖4 中的“正常”控制曲線,即轉速先下降,然后倒航斗逐漸關閉,利用水流的阻力停航,直至達到“駐航”穩定狀態。緊急停車工況是指船從最大航速狀態緊急剎車,要求船在最短的運動時間和停車距離內將航速降低至0。因此在轉速和倒航斗控制中采取極限的控制方案,即主機不降轉速而直接關閉倒航斗,曲線如圖4 中的“緊急”所示。
除增加緊急停車曲線外,在手柄功能實現方面,為提高操縱系統集成度和駕控體驗,創造性的將緊急停車聯合控制曲線也加入到手柄控制中。在最高航速狀態下,當駕駛人員在0.5 s 內將手柄推桿從+5 檔迅速拉至-3 檔時,控制程序判定此次操作為“緊急停車”狀態,此時推進聯合控制曲線將按圖4 中的點劃線“緊急”執行。此時,倒航斗將迅速關閉,但轉速不降,實現了緊急停車功能。而若駕駛人員拉手柄推桿的速度較慢,則控制程序仍采用圖4 中的“正常”聯控曲線緩慢停船。
3 仿真分析
基于噴水推進船舶運動控制原理和噴水推進推力分配理論[5],在Matlab 軟件中的Simulink 平臺上,對上述手柄操縱系統的優化內容開展船舶運動的模擬仿真。
3.1 仿真原理
根據船舶操縱原理,在描述船船在水中的操縱運動時,通常采用2 種不同的坐標系:一種是相對于地球靜止的固定坐標系E-ξηγ,用于描述船舶的位置信息;另一種坐標系則是隨船運動的運動坐標系GXYZ,X軸沿船長方向,Y軸沿船的橫剖面方向,Z方向則沿船的豎直方向,用于描述船體自身的縱蕩、橫蕩、垂蕩,以及繞3 軸的旋轉運動,橫搖、縱搖和首搖等6 種運動方式。這2 個坐標系均采用右手法則確定。由于本文關注的是噴水推進船在水平面的操縱控制,僅涉及到XY平面內的縱蕩、橫蕩和首搖3 個自由度,其他方向的運動暫時忽略。
考慮船舶在較為寬闊的海域航行時,根據日本MMG(manoeuvring model group)提出的運動分離思想、適用于常規(螺旋槳式)船舶操縱性方程組,結合噴水推進器模型的特性和外界干擾,建立適用于噴水推進船舶三自由度矢量控制模型的方程組如下:
式中:u,v,r分別是在船體運動坐標系下的縱向速度、橫向速度、首搖角速度;ψ為相對于地球坐標系下的船舶首搖角;mx,my,Jzz均為船體附加質量及附加轉動慣量;m為船體質量;X,Y,N分別為船體所受縱向、橫向力及力矩;下標H代表噴水推進器所產生的力或力矩,下標S代表船體所受粘性水動力或水動力矩,下標W表示船體所受外界干擾力或力矩。
建立船舶的運動方程后,噴水推進的推力特性計算可以歸結為噴水推進系統、主機功率和船體三方面的平衡:噴水推進系統的推力要與設計工況下的船體阻力和系統的附加阻力相平衡;主機的功率、扭矩要和推進泵吸收的功率、扭矩相平衡;推進器的揚程與系統水力損失相平衡。
推力平衡方程為:
功率平衡方程為:
推進泵揚程與系統總損失平衡方程為:
式中:T為推力;V0為船速;Vj為噴速;α為伴流利用系數;β為動能利用系數;hc為泵內水位提升高度;k1為管道系統損失系數;Kj為噴口損失系數;t為推力減額系數;ρ為介質的密度;g為重力加速度。
利用上述公式,結合噴泵的Q,H,ηp性能曲線,經計算機程序運行可以得到各轉速n對應的平衡推力T。通過噴水推進推力分配機理,在已知主機轉速n,舵角θ以及倒車斗的位置角度γ等參數的條件下,得到噴水推進裝置產生推力T的大小和方向,進而通過對2 臺推進器的異步控制,實現對船舶運動姿態的調整。
3.2 小舵角操縱仿真
在Simulink 平臺中輸入船的相關參數:本文仿真目標船為13 m 高速船,排水量約9 t,采用雙機雙泵推進,主機功率240 kW,最大航速不低于40 kn。
為模擬小舵角優化后手柄操舵系統船舶運動情況,在Simulink 平臺開展仿真試驗:假定船以6 kn 航速低速航行,并開展Z 型操舵試驗[6]。
試驗1:未優化手柄時,駕駛員操縱手柄將舵角從0°操縱至+12°位置,然后反向操縱至–12°,其后再操縱至+12°,如此反復。
試驗2:優化后的手柄,駕駛員操縱手柄將舵角指示從0°操縱至+6°位置,然后反向操縱至–6°,其后再操縱至+6°,如此反復。
由于兩試驗在手柄刻度盤上的行程相同,故默認駕駛員以相同的速率進行操舵,仿真結果如圖6 所示。
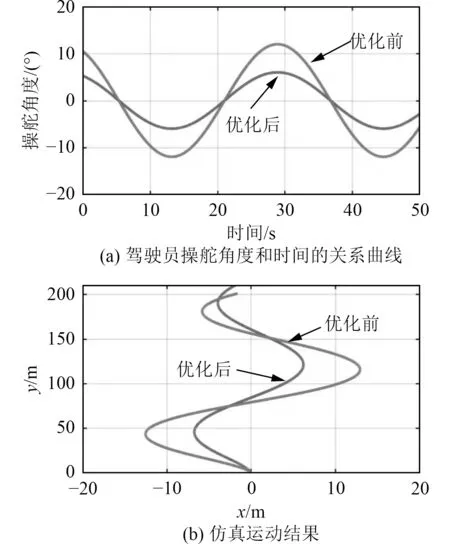
圖6 手柄優化前后的操舵指令和船舶仿真運動軌跡情況對比Fig. 6 Comparison of steering control command and ship motion simulation trail
模擬仿真對比軌跡的結果表明:在不改變操舵方法的前提下,手柄操縱系統經優化后,船舶小舵角運動軌跡明顯改善,船從原來的最大首向偏移幅值約13 m縮減為7 m,幅值縮小近46%,效果非常明顯。尤其是對于20 m 寬的河道,采用本優化方案在操舵時可以大大降低觸邊的風險。
3.3 緊急停車仿真
為驗證手柄操縱系統的緊急停車功能,在Simulink 平臺中開展模擬對比試驗見,如圖7 所示。

圖7 船舶停船時間和軌跡仿真對比Fig. 7 Comparison of the simulation ship emergency stop time and motion trajectory
試驗1:當船舶穩定運行至航速約30 kn(15.4 m/s)時,將手柄從+5 檔拉回至0 推力位置,在阻力作用下,當航速降低至0 kn 時,記錄此過程中的時間和停船距離;
試驗2:當船舶穩定運行至航速約30 kn 時,將手柄迅速從+5 檔拉至–3 檔并觸發“緊急停車”功能,當航速降低至0 kn 時,記錄此過程中的時間和停船距離。
仿真結果表明:采用優化后的手柄操縱系統實現最大航速緊急停船時,時間由正常停船的15 s 縮短至6 s,較正常停船時間縮短了60%;停船距離由110 m縮短至50 m(約4 倍船長),較正常停船距離縮短了54.5%,急停功能效果明顯。
4 結 語
本文針對船舶存在的狹窄航道航行、多工況推進和緊急停車的實際需求,對噴水推進二維手柄操縱系統的硬件和控制策略開展優化設計,并經模擬仿真驗證,結果表明:
1)在不改變原有操舵習慣的前提下,手柄操舵系統優化后首向運動的偏移幅值縮減46%,大大降低了狹窄航道碰壁的風險;
2)手柄采取了多工況檔位策略和“指令反饋”設計,提升了多工況的操縱體驗;
3)手柄增加了“緊急停車”功能,停船距離縮短了54.5%,效果顯著。
本文提出的手柄操縱系統優化方案,通過了實船測試,能夠大幅度提升特定場景下駕駛人員的操船體驗,且根據實際需求還能加入更多的輔助功能,如加速控制、Joystick 控制等,對相關技術提升有一定的借鑒作用。
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
艦船科學技術(2022年14期)2022-09-22 03:07:40
房地產導刊(2022年5期)2022-06-01 06:20:14
船舶(2021年4期)2021-09-07 17:32:22
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34