基于CCD 傳感器的智能車路徑識別研究*
2023-07-25 05:18:40尚友良符曉玲
科技與創新 2023年11期
米 湯,尚友良,符曉玲
(昌吉學院,新疆 昌吉回族自治州 831100)
隨著科學技術的發展和人類社會的進步,汽車行業進入了新的軌道,開始由傳統制造向智能制造發展。在新的發展趨勢下,如何使智能車準確高效地識別路徑是首要問題,這也受到了諸多學者的關注和研究。目前路徑識別的方法主要有光電傳感器、視覺傳感器和電磁傳感器3 種。
焦冰等[1]設計了一種以MK60DN512ZVQ10 為控制器核心,OV7725 視覺傳感器獲取賽道二值化圖像的智能車控制系統,并采用PID 控制算法控制舵機的轉向和驅動電機的轉速。馮玉如[2]、杜方鑫[3]設計了一種基于線性CCD 的智能車控制系統,采用線性CCD 采集路況信息,將采集到的路況信息發送給單片機,單片機根據閾值進行二值化處理,實現自動循跡的功能。王海燕[4]設計了一種基于電磁傳感器的路徑識別系統,該系統采用6 組相同電磁電路橫向“一”字布局,大大提高了檢測密度和廣度,該設計提升了數據采集的效率和準確度,使得智能車的循跡更加穩定。
1 智能車硬件總方案
為了更好地實現智能車自主循跡,本文給出的設計方案硬件包括控制器核心模塊、電源模塊、攝像頭驅動模塊、電機驅動模塊、舵機驅動模塊和OLED 顯示模塊,整體硬件結構如圖1 所示。
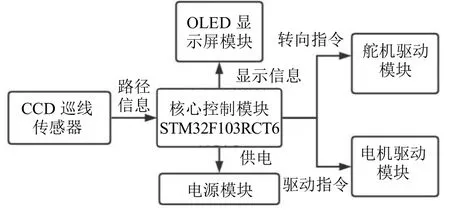
圖1 硬件結構
1.1 核心控制模塊
選用32 位的嵌入式微控制器STM32F103RCT6 作為核心處理器,程序存儲容量是256 KB,程序存儲器類型是FLASH,并配有必要的外圍電路組成了智能車的核心控制系統。STM32F103RCT6 嵌入式微處理器作為處理核心,擁有高性能、低成本、低功耗、方便二次開發等特點[5]。
核心控制器如圖2 所示。
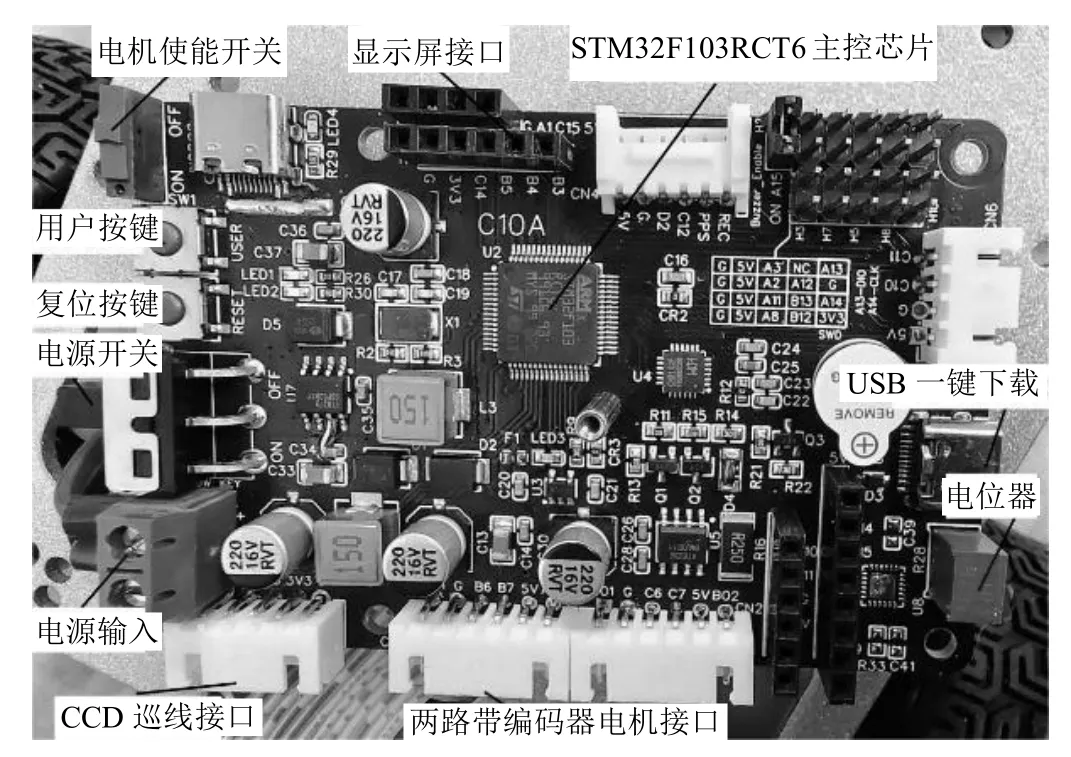
圖2 核心控制器
1.2 電源模塊
電源模塊是智能車系統不可或缺的一部分,它是整個系統的動力源泉,為智能模型車的微控制器、舵機、CCD 傳感器、電機等模塊提供所需的工作電壓。
本次設計選用的是12 V 18650 鋰電池,其標稱容量為2 600 mAh。這種電池具有安全性能好、容量大、無記憶效應、壽命長等優點,具有短路保護和過充過放保護的能力,在工作中穩定性比較好。
1.3 攝像頭驅動模塊
視覺傳感器的數據采集與處理是整個智能車制作調試中至關重要的一環,視覺傳感器采集賽道信息的正確與否直接決定智能車的循跡性能。該設計選用TSL1401 線性CCD 作為智能車系統的視覺傳感器,該線性傳感器包含了128 個線性排列的光電二極管。每個光電二極管都有各自的積分電路,積分電路由相關的電荷放大電路以及一個內部像素數據保持功能組成。內部像素數據保持功能可以為所有像素點提供同時積分的開始和停止時間。模塊內部控制邏輯簡單,只需要串行輸入(SI)信號和時鐘信號(CLK)。TSL1401線性CCD 傳感器實物如圖3 所示。
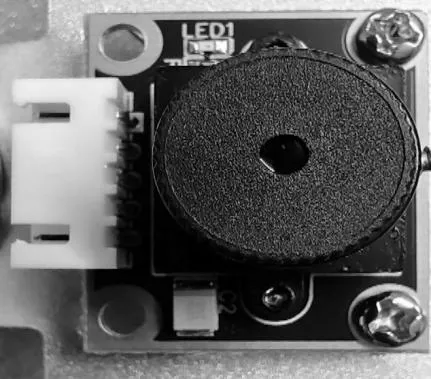
圖3 CCD 傳感器
1.4 電機驅動模塊
本設計的驅動電機選用MG513 型號的直流有刷電機,其額定電壓為12 V,額定功率約4 W。直流有刷電機是車輛的動力輸出結構,將電能轉化為機械能,驅動車輛前進,通常是電機本體與減速齒輪系的結合。編碼器類型為高性價比AB 相霍爾編碼器,車輪扭動一圈輸出390 個脈沖,自帶上拉整形,STM32 編碼器接口模式可硬件計數。智能車系統選用AT8236 直流有刷電機驅動器,它能夠以高達6 A 的峰值電流雙向控制電機,利用電流衰減模式,可通過對輸入信號進行脈寬調制來控制電機轉速。
1.5 舵機驅動模塊
舵機是用于控制車輛前輪轉向的裝置。本設計選用數字型舵機S20F 控制智能車轉向,此款舵機供電電壓為5~6 V,可連續30 min 堵轉并保持力矩,使用全金屬齒輪,頻繁打舵不卡齒。舵機工作原理是控制電路接收信號源的控制脈沖,并驅動電機轉動。齒輪組將電機的速度成大倍數縮小,并將電機的輸出扭矩放大響應倍數后輸出。電路板檢測并根據電位器判斷舵機轉動角度,然后控制舵機轉動到目標角度或保持在目標角度。
2 智能車軟件設計
2.1 驅動電機控制
本次設計驅動電機選用PID 控制。所謂PID 控制,就是對系統偏差進行比例、積分以及微分的控制。PID控制策略結構簡單、穩定性好、可靠性高,并且易于實現。本設計選用的位置式PID 控制算法可以很好地提升系統性能。位置閉環控制就是根據編碼器的脈沖信號累加測量電機的位置信息,并與目標值進行比較,得到控制偏差,然后通過對偏差的比例、積分、微分進行控制,使偏差趨向于零的過程。
位置式PID 公式為:
式(1)中:Kp為比例項系數;Ti為積分時間常數;Td為微分時間常數。
將Kp乘上各項,展開就得到了常用的位置式PID公式:
式(2)中:Ki為積分項系數;Kd為微分項系數。
上面給出的位置PID 公式為連續控制的,但在實際控制智能車的過程中是無法做到連續控制的,需要使用離散化的PID 公式,為:
式(3)中:u(k)為輸出;e(k)為本次偏差;∑e(k)為e(k)偏差的累積和,其中k為1,2,…,k;e(k-1)為上一次的偏差。
電機控制框圖如圖4 所示。程序代碼如圖5 所示。
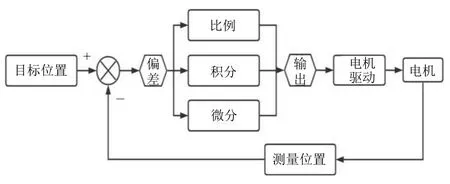
圖4 電機控制框圖
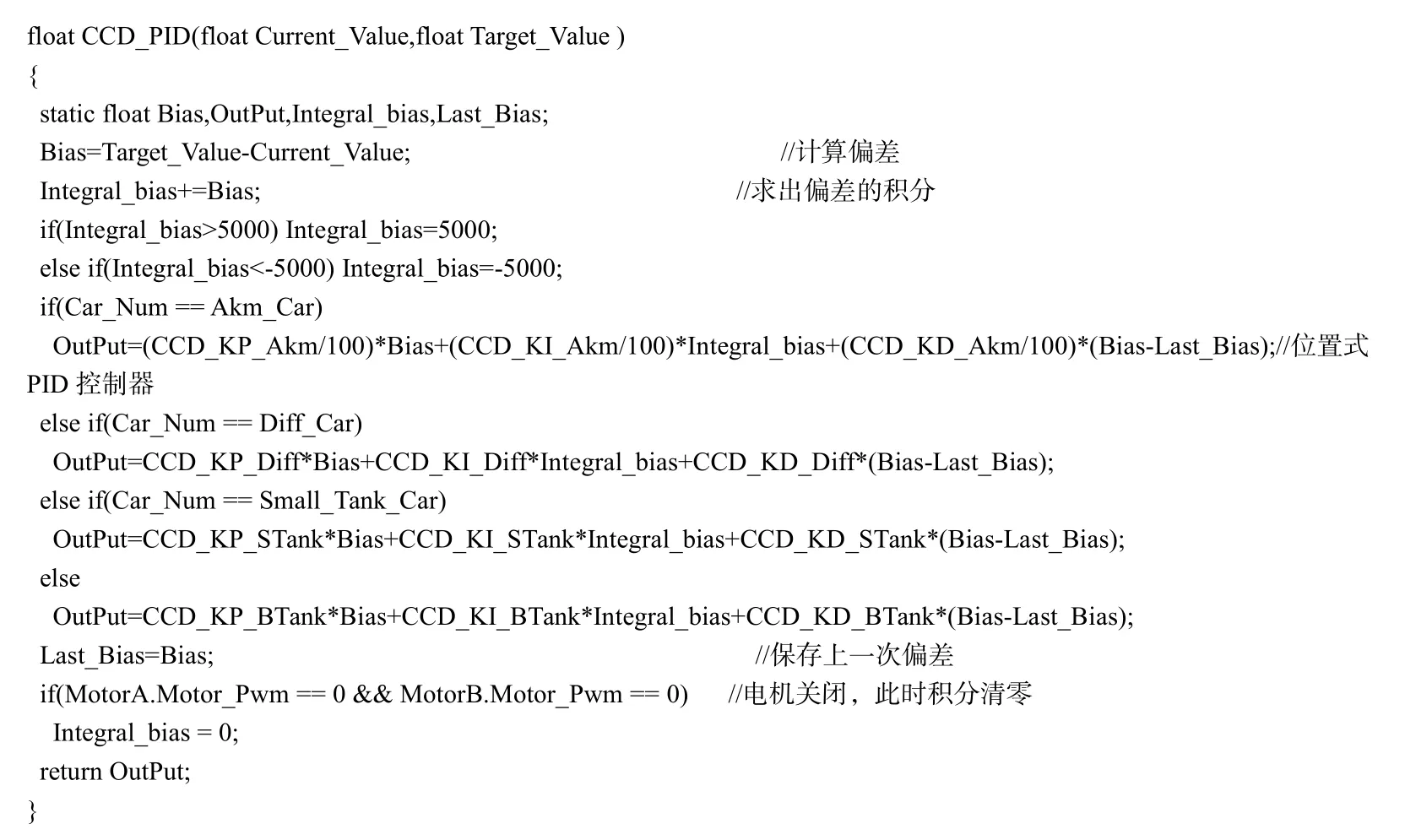
圖5 電機控制程序代碼
2.2 轉向舵機控制
舵機的控制需要一個周期為20 ms 的時基脈沖,脈沖寬度為0.5~2.5 ms,和舵盤位置0°~180°相對應,呈線性變化。舵機輸出的角度隨著脈沖信號的寬度而發生改變,即給它一定寬度的脈沖信號,它的輸出軸就會維持在一個與脈沖寬度相對應的角度上。舵機通過調節信號占空比來改變舵機轉動的角度。舵機轉向控制框圖如圖6 所示。
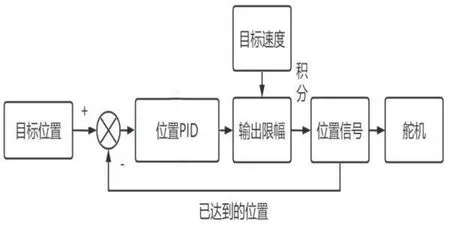
圖6 舵機轉向控制框圖
2.3 路徑識別與圖像處理
路徑檢測與識別是智能車自主循跡的基礎,本設計選用CCD 傳感器識別賽道路徑,智能車通過攝像頭獲取路徑圖像,通過二值化提取出道路的黑線信息,然后由微控制器傳輸控制信息決策,控制舵機的轉角和電機的轉速[6]。
總體設計如圖7 所示。
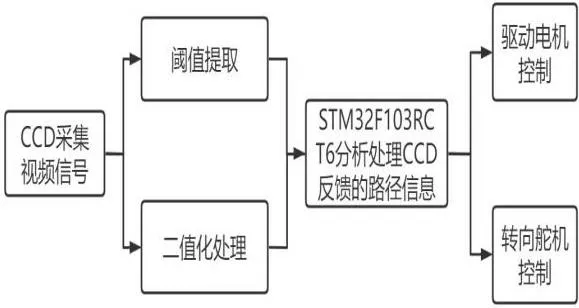
圖7 循跡設計圖
2.3.1 閾值提取
CCD 攝像頭全部的感光點都經過一個電荷-電壓轉換器,因此可以保證幾萬個感光點的一致性,這就進一步提高了圖像的穩定性[7]。TSL1401 線性CCD 傳感芯片只能返回一維數據,在較短的時間內可以完成信息數據的采集[8]。線性CCD 采集的信號由于是被反射回來的光線,因此結果容易受外界環境變化的影響,這就意味著設計一種抗干擾能力強、識別精度高的智能車識別系統尤為重要。
由于線性CCD 傳感器一個曝光周期只能采集視野范圍內一條線的信息,即128 個像素信息。通過AD采樣獲取像素點的電壓數值。通過采樣函數將一個曝光周期內采集到的128 個像素點的電壓值寄存到數組AVD1[i]中,用于計算與數據處理。在128 個像素點的信息中,光線越強的像素點電壓值越高,越弱的像素點電壓越低。由此可以區分白底賽道和黑色引導線,通過算法計算賽道中間值,讓小車近似循中線行進。
實際黑白賽道中白色部分的像素點電壓值要大于黑色部分,因此想要檢測黑線在賽道中的實際位置,通過設置閾值,將黑線和白底區分開。將CCD 傳感器每次采集回來的128 個像素點灰度值,通過動態循環比較的方式,找出整個數組中最大和最小的灰度值,取兩者之和的平均值作為黑白線間的閾值。
由于CCD 傳感器鏡頭容易受到光照環境的影響,智能車在賽道上行駛時,對應每個位置光的折射強度不一樣,因此每次采集回來的像素點灰度值都會發生變化,通過動態循環所得的閾值是一個動態值,能夠在不同的光照環境或者不同曝光時間長度下更好地區分黑線和白底的像素點灰度值。
2.3.2 二值化處理
賽道中黑線的位置主要是通過檢測像素點灰度值的跳變來確定。其原理為:將采集到的像素點灰度值數組與閾值通過動態循環比較,當像素點灰度值大于或等于閾值,判定該像素點對應為白底部分;反之,則判定為賽道的黑色引導線。這就是二值化的基本原理與方法。通過動態循環依次左右循環比較,得到白底部分跳變為黑線和黑線部分跳變為白底部分時對應的像素點數組序列號,即可確定黑線在賽道中的位置,通過算出序列號的平均值計算出賽道黑線的中線值。調整Z軸角速度(PID 控制),讓黑色引導線時刻保持在車體的中間,以此實現智能車的自主巡線與轉向。通過Keil 軟件進行編程,實現線性CCD 取中值。程序代碼如圖8 所示。
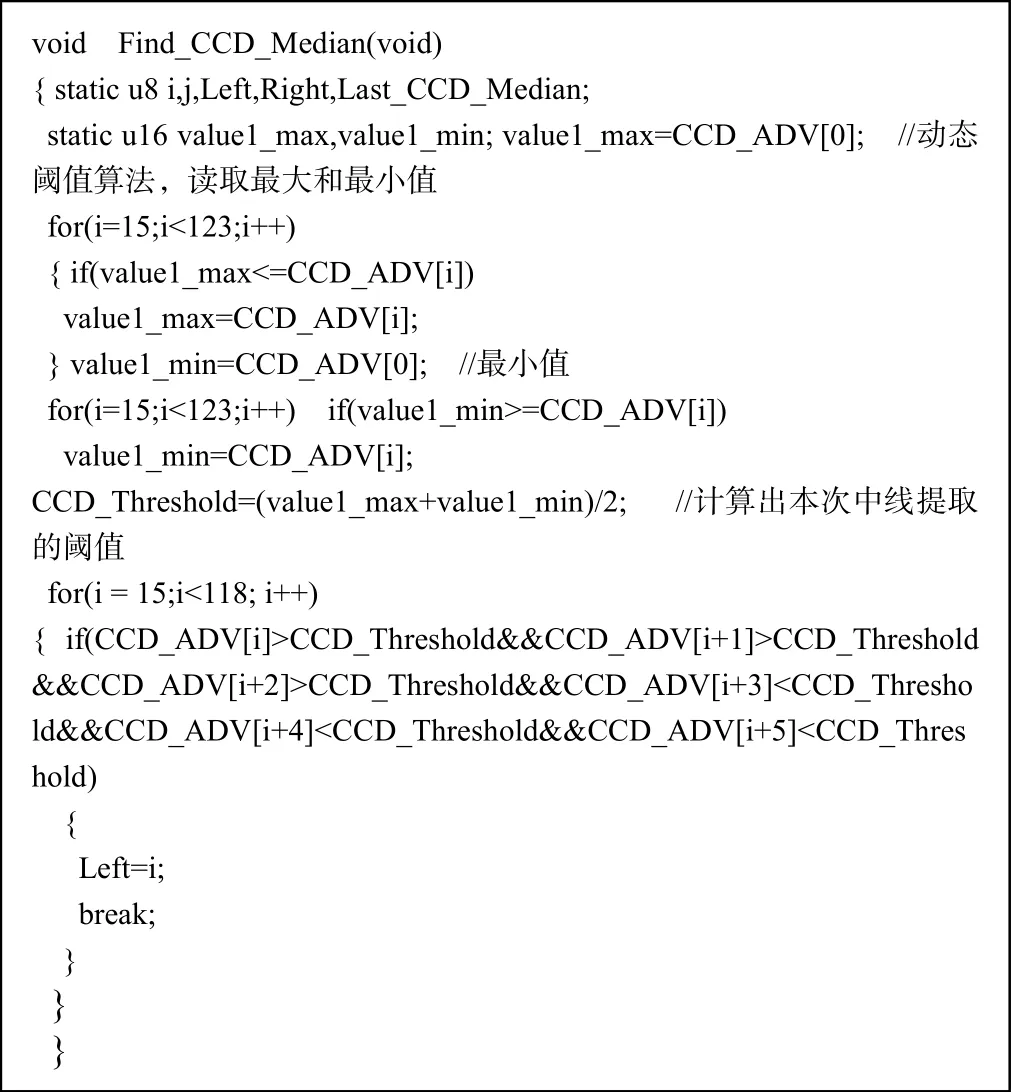
圖8 線性CCD 取中值程序代碼
3 測試驗證
為了更好地驗證本設計的普適性和合理性,本次實驗分為3 個環節進行測試,分別是直線、S 彎和環形三種賽道。本次測試所用賽道是自制的中間鋪有2.0 cm 黑色引導線的白底黑線賽道。實驗結果如下。
3.1 直線賽道
首先,測試了智能車在直線賽道的循跡情況,通過設定不同的速度觀察循跡效果,可以看出智能車在循跡過程中沒有偏離黑色引導線,行駛平穩沒有晃動。結果如圖9 所示。
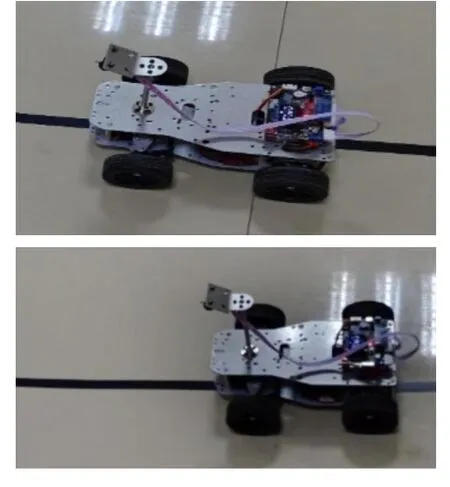
圖9 直線測試
3.2 S 彎道
其次,對智能車在彎道的循跡效果做了測試,控制智能車在駛入彎道時減速,駛出彎道時加速。由測試發現智能車轉彎時不會駛出賽道中線且車速切換自然,結果如圖10 所示。
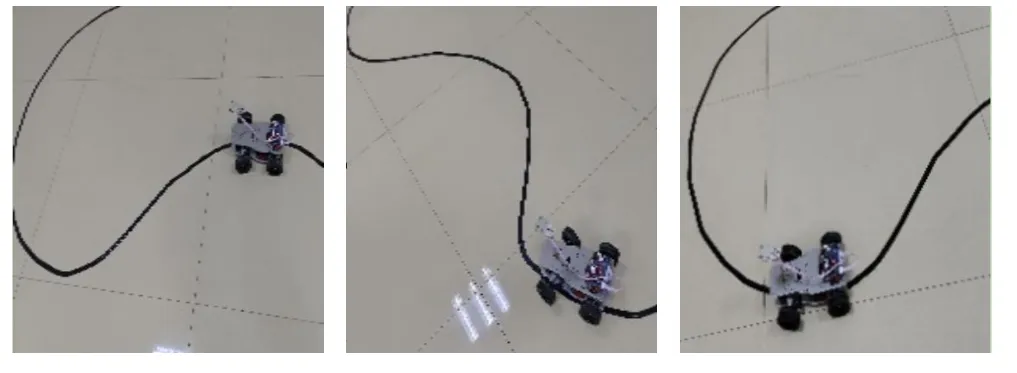
圖10 彎道測試
3.3 環形賽道
最后,測試智能車在環形賽道的循跡效果,這一環節設定不同速度循跡行駛,觀察不同速度智能車轉彎時偏離中線的角度,由實驗結果發現,當車速增大時智能車會駛出環形賽道。針對這種情況,可以通過調節PID 參數改善。PID 調參過程如表1 所示,實驗結果如圖11 所示。
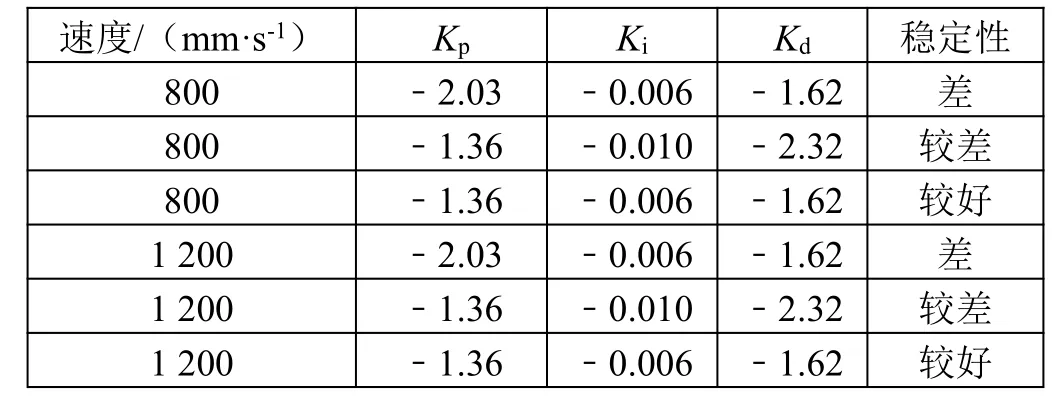
表1 PID 參數調節
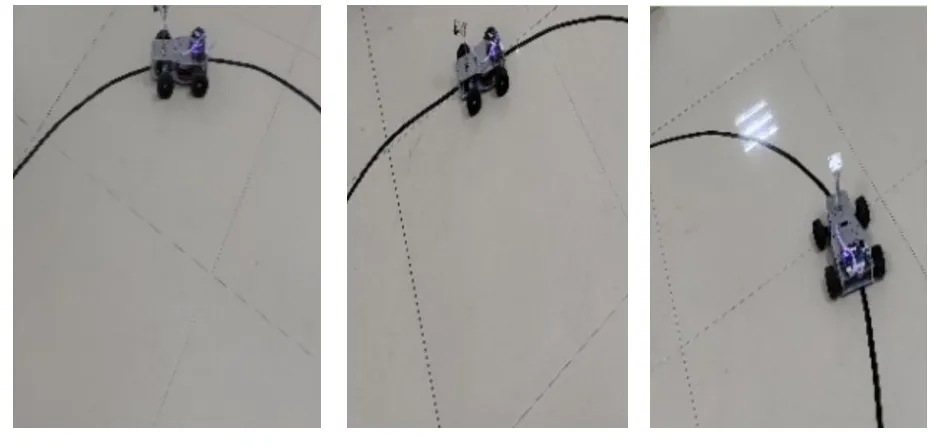
圖11 環形賽道測試
由以上測試結果可以看出,本次設計可以使智能車在不同賽道上自主循跡行駛,且行駛穩定,控制偏差小。由此印證了本次設計的合理性和可行性,由實驗結果也可以得出,該控制系統具有很好的穩定性和魯棒性。
4 結束語
基于線性CCD 設計了智能車路徑識別控制系統,采用STM32F103 作為核心控制器,TSL1401 線性CCD采集賽道路徑信息,并采用動態閾值提取的方式選取閾值,然后對圖像做二值化處理,由微控制器根據反饋回的圖像信息控制智能車自主巡線。實驗表明,本設計基于CCD 傳感器的智能車控制系統可以使智能車在不同賽道自主循跡行駛,且狀態穩定,由此驗證了本次設計的可行性和穩定性。進而本設計擁有良好的魯棒性和實時性,具有很強的實用性。
猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
