高速公路跟車場景的碰撞時間改進方法及應用案例研究
2023-07-25 05:18:50王孜健李心怡么新鵬
科技與創新 2023年11期
關鍵詞:模型
王孜健,李心怡,景 峻,李 鵬,么新鵬
(1.山東高速集團有限公司,山東 濟南 250000;2.同濟大學道路與交通工程教育部重點實驗室,上海 201804)
1 研究背景
道路安全始終是最值得關注的社會問題之一。隨著中國交通水平的發展,人均汽車保有量不斷提高,交通事故發生的數量整體呈上升趨勢[1]。為了降低交通事故發生的概率,加強對交通安全的研究至關重要。
隨著智能化交通安全管控的不斷發展,交通安全替代分析方法(Surrogate Safety Analysis)在學界中也引發人們的關注。交通安全替代分析方法以其“未遂先兆”、高效快速的特點,與“事后主動”、數據收集周期長的通過歷史碰撞數據分析相比,更具優勢。安全評價指標的構建,在交通安全替代分析領域中有著廣泛的應用價值。
針對車-車沖突,現有主流交通沖突分析技術主要基于恒定速度駕駛。 其中, 碰撞時間(Time-To-Collision,TTC)是跟車沖突研究領域中廣泛應用的指標,其計算公式如下所示:
式(1)中:tTTC(t)為t時刻兩車碰撞時間,s;Xlead(t)為t時刻前車縱向位置,m;Xfollow(t)為t時刻后車縱向位置,m;llead為前車的車身長度,m;X˙follow(t)為t時刻后車的縱向速度,m/s;為t時刻前車的縱向速度,m/s。
碰撞時間(TTC)由HAYWARD[2]于1971 年首次提出,其假設在車輛與車輛碰撞預測的過程中,以恒定的現有車速和行駛狀態到兩車相撞所間隔的時間作為判斷兩車相撞的風險程度。然而,這一假設忽略了車輛在駕駛過程中的速度及行駛狀態變化,缺乏了對車輛與車輛交互影響過程中的動態演化機制,因此其不能準確反應車-車交互過程中的實際風險演化特征。
現有針對碰撞時間的改進研究主要基于TTC 的計算結果和統計分布展開,如暴露碰撞時間(Time Exposed TTC,TET)和累積危險碰撞時間(Time Integrated TTC,TIT)[3]。前者的定義為:規定閾值,計算所有車輛TTC 在該時間和區域內低于該閾值的時間之和。但該指標無法表示低于閾值的程度。可能存在TET 相同,但低于閾值程度顯著不同的情況。TIT針對TET 的缺點進行改進,計算TTC 在該時間和區域內低于閾值的時間積分。與TTC 相比,TIT 和TET 的優勢在于用新指標替代在一個時間段內使用一個路段的所有對象的TTC 值。但這兩個指標僅對某時間段內某段道路的整體安全進行評價,不能表示兩車間實時安全性。
由于以上方法依然基于恒定速度假設,并未從根本上彌補TTC 未考慮車-車交互影響的缺點,本文擬通過改變軌跡預測的方式對TTC 進行改進,利用全域軌跡數據,提取跟車場景,構建LSTM 軌跡預測模型,計算改進碰撞時間(improved TTC,iTTC)。
2 數據準備
2.1 數據來源
數據來源于同濟大學道路交通安全與環境教育部工程研究中心開發的同濟道路軌跡數據平臺(TJRD TS)[4]。數據集包括山西五盂智慧高速的基于毫米波雷達和激光雷達采集的全域軌跡數據,以0.1 s 為間隔采集。本文所用的數據為2021 年7 月、8 月、9 月于山西五盂智慧高速路段(K347+600—K352+690)采集的車輛軌跡數據集,共計63 397 059 條數據,其中核心數據如表1 所示。

表1 核心數據描述
2.2 數據處理
由于本數據集由毫米波雷達和激光雷達采集,工作時受環境影響大,可能存在數據缺失或假數據,因此應當對該數據集進行處理。通過數據清洗,將缺失率較高的車輛軌跡和行駛軌跡明顯不合理的車輛軌跡進行剔除。篩除異常數據后,使用線性插值法補足缺失片段,然后利用卡爾曼濾波去除數據中的噪聲。
2.3 跟車場景提取
由于本文的研究對象是跟車場景,因此實際使用的是從數據集中提取的跟車行為片段,目前從該數據集提取了26 007 個車輛跟車事件。跟車事件認定的方式為[5]:①雷達目標的識別號為LV(前車)大于0 且保持不變,以保證FV(后車)的前車是同一個LV;②LV(前車)和FV(后車)之間的縱向距離在7~120 m 區間內,以排除堵車的情況;③LV(前車)和FV(后車)之間的橫向距離小于2 m,以確保LV(前車)和FV(后車)位于同一條車道上;④跟車事件的持續時間大于15 s,保證每個跟車事件有足夠的數據用于分析。
從整個數據集中抽取出16 905 個跟車事件,每個事件由若干條記錄構成,每個記錄包含了前后車的運動學狀態等信息。
3 行車風險致因模型構建
3.1 模型選擇
長短期記憶(Long Short-Term Memory,LSTM)是一種由Hochreiter 和Schmidhuber(1997)提出的在長序列預測中表現較好的神經網絡。軌跡預測實際上可視為序列生成任務,因此本文選擇使用LSTM 進行軌跡預測,其基本結構如圖1 所示。LSTM 神經網絡的核心在于通過多門協作的方式,控制信息的流動。

圖1 LSTM 基本結構
3.2 模型搭建
3.2.1 改進的LSTM 的軌跡預測模型
實驗發現,神經網絡的各項參數對預測精度影響較大。本文模型中加入了Embedding 作為LSTM 的輸入,同時加入Dropout 層來防止出現過擬合的問題。改進后的軌跡預測模型如圖2 所示,該模型選擇adam為模型優化器,mse 為損失函數。
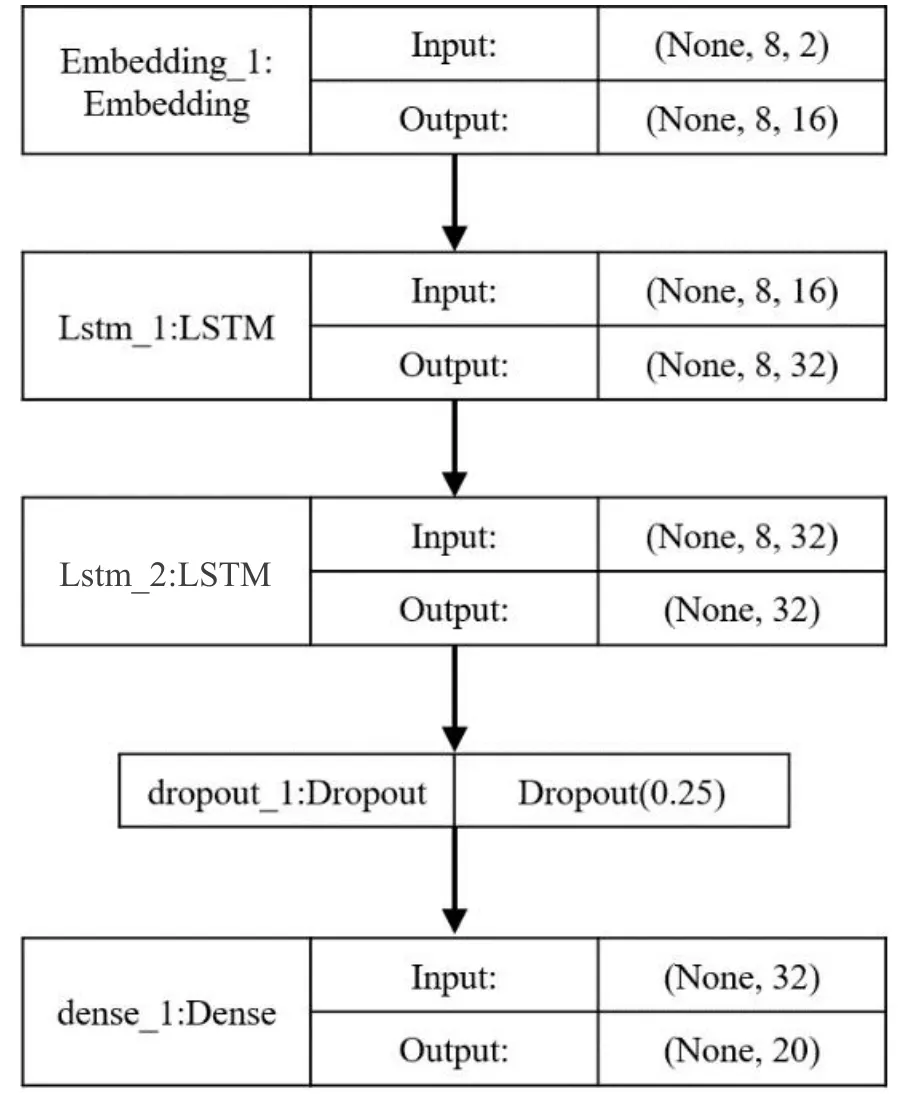
圖2 改進的軌跡預測模型
3.2.2 基于軌跡預測的碰撞時間計算
選取處于跟車狀態的車輛對,對兩車分別利用改進的LSTM 軌跡預測模型進行軌跡預測。若在預測過程中的某一時刻t出現兩車中心點距離小于4.6 m 的情況,則將t時刻視為預測軌跡產生碰撞的時間點tpc。通過軌跡預測得到的預測碰撞時間(predicted TTC,pTTC)公式如下所示:
式(2)中:tpTTC為pTTC 的值,s;tpc為預測軌跡產生碰撞的時間點,s;tp0為初始預測時間,s。
重復該流程1 000 次,取5%分位的pTTC 作為當前時刻的iTTC。
4 應用案例
4.1 數據來源
數據也是來源于同濟大學道路交通安全與環境教育部工程研究中心開發的同濟道路軌跡數據平臺(TJRD TS)[4]。數據集包括山西五盂智慧高速的基于毫米波雷達和激光雷達采集的全域軌跡數據,以0.1 s 為間隔采集。本文提取的數據為山西五盂智慧高速路段(K347+600—K352+690)2021 年10 月的車輛軌跡數據集。
4.2 驗證軌跡預測結果和分析
經過大量實驗,最終選擇將軌跡數據的時間間隔處理為0.4 s,用前6.4 s 的軌跡預測后8 s 的軌跡。為了驗證改進后的多層LSTM 在軌跡預測方面的作用,本文對不同的LSTM 算法進行測試,并用均方誤差對改進算法的有效性進行驗證,結果如表2 所示。可以看出,改進后的雙層LSTM 模型誤差較小,軌跡預測精度提高。

表2 模型改進前后預測效果對比
4.3 改進碰撞時間應用示例
選取一跟車場景,繪制改進碰撞時間iTTC 和碰撞時間TTC 的變化曲線圖,如圖3 所示。其中,時間戳間隔為0.4 s。若將TTC 小于等于2 s 片段視為危險場景,傳統TTC 在第3.1 s 時識別出危險場景,改進后的iTTC 在第2 s 時識別出危險場景,較原TTC 提前1.1 s識別出危險場景。

圖3 改進的軌跡預測模型
可以看出,改進碰撞時間與傳統碰撞時間相比,或能更及時識別出危險情況。該提前識別危險場景的時間可為駕駛人員提供更多反應時間,從而有利于交通安全,降低事故發生率。
5 結論
本文考慮到TTC 指標恒速假設的局限性,利用基于LSTM 的軌跡預測改進碰撞時間。該指標的優勢在于,通過大量數據訓練使模型在預測軌跡過程中考慮到運動預測中的不確定性,與事實更加相符。與傳統LSTM 模型相比,改進后的LSTM 模型具有更好的軌跡預測效果。根據此模型得到的改進碰撞時間iTTC 可以更加合理推斷未來數秒內車輛的行駛軌跡,從而得到更貼合實際情況的碰撞時間。同時,驗證結果顯示,改進后的iTTC 較傳統TTC 或能更及時識別出危險場景,為駕駛人員提供更多的反應時間,從而降低事故發生概率,有利于道路安全發展。
但本文所構建指標僅考慮跟馳場景下的駕駛特征,后續研究可根據更多駕駛場景下的駕駛特征變化進一步探究沖突指標改進方案及其效果。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
