淺析針對全球衛星信號的弱干擾消除方案
2023-07-28 08:41:04翟曉東張禛君
科學技術創新 2023年19期
翟曉東,張禛君
(上海司南衛星導航技術股份有限公司,上海)
引言
傳統的干擾消除方案[2]主要有兩種:第一種為數字信號在時域處理的干擾消除方案;第二種為數字信號在變換域處理的干擾消除方案。首先在時域的數字信號處理方案具有算法復雜度高、干擾消除延遲大兩大缺點;其次在變換域的干擾消除方案雖然具有干擾消除延遲小的優點,但是技術實現比較困難。變換域干擾消除的技術方案[3]主要利用快速傅里葉變換(FFT)將信號從時域變換到頻域上,在頻域上統計每個頻點的能量,判斷每個頻點是否是干擾頻點的技術方案。與時域干擾消除方案相比,頻域干擾消除方案具有時間延遲小,可以消除任意類型干擾的優點,在工程上一般都是使用該方案。
但是,在實際工程應用中,傳統干擾消除系統存在干擾探測靈敏度差、干擾消除功耗大、干擾消除效率低三大缺點,所以針對傳統干擾消除系統的缺點,本文旨在通過新的設計方案,對以下幾點進行優化:
首先,對傳統干擾消除方案的結構進行優化來降低整體硬件實現功耗。
其次,對輸入中頻信號的相干積分法,提高干擾探測靈敏度,有效提高對弱干擾信號的消除效率。
最后,通過實時更新干擾判斷的門限閾值來實現干擾消除的自適應能力。
1 傳統干擾消除方案
GNSS 衛星信號的傳統干擾消除方案主要采用干擾探測器(CW Detector)和干擾消除器(CW Canceler)組成,分別是用來判斷信號中是否存在干擾和查找干擾頻點并消除。GNSS 衛星信號干擾消除方案的典型的結構如圖1 所示。
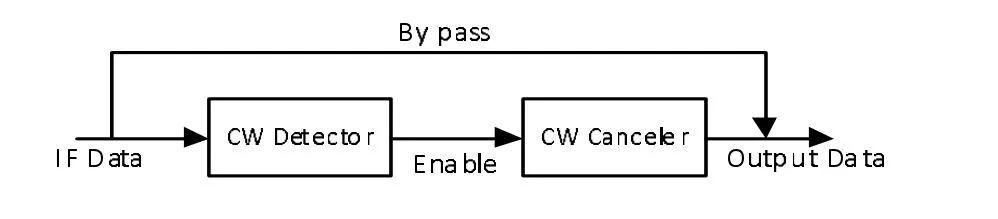
圖1 干擾消除典型結構框圖
當干擾探測器(CW Detector)檢測到信號中干擾存在時,使能打開后續的干擾消除器(CW Canceler),沒有檢測到干擾時關閉干擾消除器,直接旁路by pass通過數據。
干擾探測器(CW Detector)的功能是檢測信號中是否存在干擾,其核心部分是一個數字掃頻儀,組成結構如圖2 所示。先后通過本地數控振蕩器NCO 和窗函數對輸入中頻信號做頻譜分析,從而完成濾波選頻,達到指定頻點抽取的目的,針對每一個抽取的頻點,計算復信號I/Q 兩路的模值,該模值一方面用于更新干擾探測器的閾值門限,另一方面用于統計所有頻點的最大值,并判斷最大值是否超過閾值門限,一旦信號中某個頻點的強度超過閾值,則認為信號中存在干擾信號,從而使能打開后續的干擾消除器。
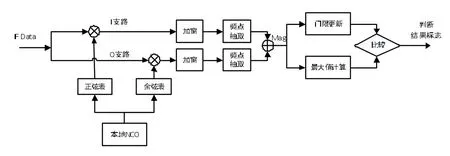
圖2 CW Detector 典型操作流程圖
干擾消除器(CW Canceler)的功能是為了準確找到所有干擾頻點并將干擾頻點的頻譜能量置為0,從而達到消除干擾的目的,組成結構如圖3 所示[4]。輸入中頻信號先通過重疊加窗函數,再通過快速傅里葉變換(FFT),將信號從時域變換到頻域,在頻域搜索超過閾值的干擾頻點,并將該頻點的頻譜能量置為0,再將干擾消除后的頻域信號通過逆傅里葉變換(IFFT)變換成時域信號,最后通過反加窗函數將還原成連續的時域信號并輸出。
2.2 兩組受試者血清IL-15、MCP-1、TGF-β水平之間的相關性分析 經Pearson線性相關性分析,健康對照組受試者血清IL-15、MCP-1、TGF-β水平之間均無線性相關(P>0.05);骨關節結核患者血清IL-15、MCP-1、TGF-β水平之間亦無線性相關(P>0.05)。見表2。

圖3 CW Canceler 典型操作流程圖
在典型的干擾消除器中,一方面,干擾探測器用于檢測信號是否存在干擾,然而干擾消除器也需要對輸入中頻信號的所有頻點進行再一次掃描,以確認干擾頻點位置;另一方面,干擾探測器中確定是否存在干擾的閾值門限需要足夠的大,以防止干擾誤檢測;同理,干擾消除器中為防止檢測虛警,造成信號不必要的損失和衰減,也需要將干擾頻點的閾值門限設置在一個比較安全的范圍。所以傳統的干擾消除器存在以下缺點:
(1)干擾消除器包含了干擾探測器,對于重復的干擾探測器可以實時功耗性能可優化。
(2)干擾探測器對于弱干擾信號(弱干擾信號)的檢測能力弱,不能有效的檢測出弱干擾信號,容易漏檢。
(3)干擾消除器不易搜索到弱干擾信號的干擾頻點,對弱干擾信號的魯棒性弱,干擾消除效率低。
2 弱干擾消除方案
在GNSS 衛星信號干擾消除過程中,針對難以檢測的弱干擾信號消除問題,本文提案通過信號相干積分法提高弱干擾信號的干信比,從而有效的提高了弱干擾干擾信號的檢測和消除效率,提高新設備對弱干擾信號的魯棒性和靈敏性;并且通過優化干擾消除器結構,降低算法功耗,增強硬件資源使用率;在檢測干擾的同時,實時自動更新干擾檢測的閾值門限,可以對不同能量大小的干擾信號自適應消除。
本文提案的干擾消除器的整體結構如圖4 所示。改進型干擾消除器結構優化掉了干擾探測器,在干擾消除器中增加了信號相干積分模塊,所增加的模塊已經在固件中完成,便于工程實現。
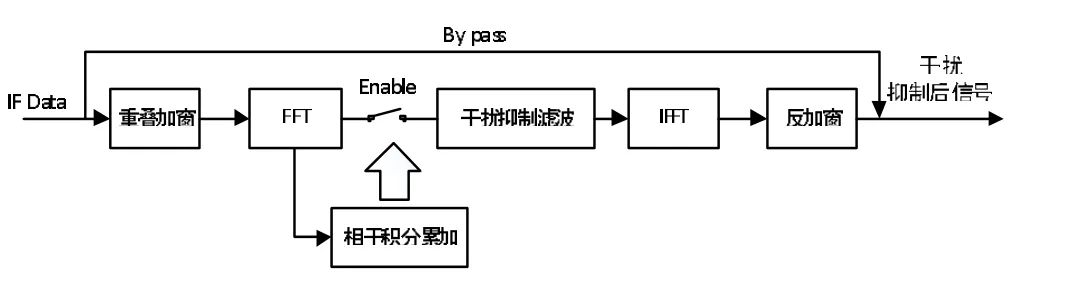
圖4 本文提案的新干擾消除結構框圖
對于輸入的中頻衛星信號IF Data,首先經過重疊加窗模塊,得到加窗后信號;其次對加窗信號做快速傅里葉變換(FFT),將時域信號變換到頻域;然后,對頻域信號做相干累加,并判斷峰值是否超過閾值,返回干擾是否存在標志和干擾頻點;如果干擾存在,則打開自適應濾波模塊,實現干擾消除;如果干擾不存在,則不打開自適應濾波模塊,輸入中頻信號直接按照By pass 支路輸出,其中頻譜相干積分累加一方面可以檢測信號中是否有干擾存在,通過相干積分累加可以逐漸突出干擾信號峰值的影響,以達到對弱干擾干擾信號檢測和頻點掃描的目的;另一方面可以輸出干擾頻點信息給后續的自適應濾波模塊;同時還能自動更新自適應干擾消除的門限閾值參數。經過自適應干擾消除后的頻域信號需要再經過逆傅里葉變換(IFFT),將頻域信號轉換到時域信號,最后經過反加窗函數,實現干擾自適應消除后的信號與輸入信號的無縫連接,并輸出,本文提案所有模塊功能如圖5 所示。
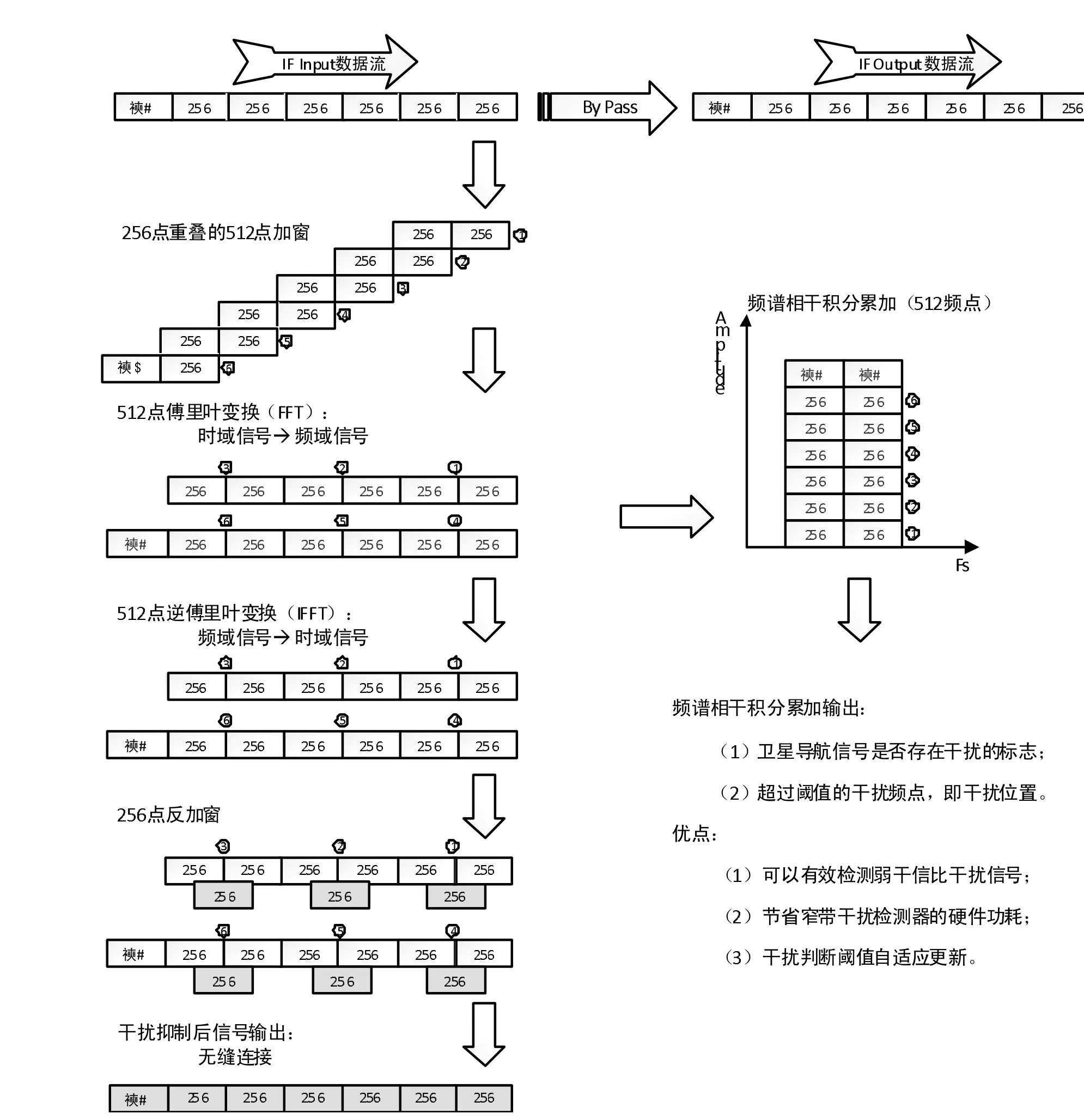
圖5 本文提案干擾消除法中所有模塊功能示意圖
3 優化方案
針對于本文提案設計思路,還可以對某些模塊進一步優化,以便降低硬件實現功耗,或則在增加硬件資源開銷的前提下,獲得對干擾靈敏度動態性的提升,這里列舉兩個不同方向的優化設計方案:
優化設計方案一:上述的FFT 和IFFT 算法,在硬件實現時,除了旋轉因子的區別外并沒有區別,所以重復利用FFT 實現IFFT 算法,以優化硬件資源功耗,提升硬件系統性能。如圖6 所示。

圖6 基于FFT 重復利用的IFFT 等效實現框圖
中頻信號經過加窗后順序輸入FFT 模塊,逆序輸出;經過自適應濾波模塊后,重新做一次逆序,得到順序頻譜信號,重新輸入FFT 模塊,逆序時域信號輸出,再做一次逆序,得到順序輸出的時域信號。即FFT 輸出信號經過逆序、FFT、逆序的操作可以等價的得到IFFT 的輸出。
優化設計方案二:在相干積分累加模塊,增加/減少傅里葉變換點數或相干積分長度,實現干擾消除靈敏度性能的動態變化。比如通過增加傅里葉變換的點數或則相干積分累加的長度,雖然硬件資源的開銷增多了,但是擴大了頻點掃描范圍,同時增強了對弱干擾干擾信號的檢測能力。還可以根據需求適當減少傅里葉變換的點數或則減少相干積分累加的長度,以節省硬件功耗。如果相干積分長度退化為1,則等價于最簡單的干擾探測器。
4 結論
本文主要在傳統干擾消除方案的基礎上,針對其缺點,提出新的干擾消除方案,詳細介紹了新干擾消除方案的技術實現細節,并且在新方案的基礎上提出了兩個新方案,一是利用傅里葉變換和逆傅里葉變換的特點優化硬件資源利用率;二是利用相干積分技術提高干擾消除靈敏度技術。本文有效的拓展了干擾消除方案的設計思路,提高新干擾消除方案的可用性,為我國北斗衛星導航信號的廣泛應用提供技術保證。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
海峽科技與產業(2016年3期)2016-05-17 04:32:12
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25