基于關系網絡的軸承剩余使用壽命預測方法
2023-08-04 13:57:42趙志宏孫詩勝
自動化學報 2023年7期
趙志宏 張 然 孫詩勝
軸承是機械設備中必不可少的零部件之一,廣泛應用于各個工業領域,其健康狀態直接影響了機械設備的安全性與可靠性.軸承在長期運轉過程中,極易發生各種故障,一旦發生故障,輕則造成經濟損失,重則危害人類生命安全.因此實現軸承故障預測與健康管理(Prognostics and health management,PHM)顯得尤為重要[1].目前,針對軸承的PHM技術主要包括實時狀態監測[2]、故障診斷[3]、剩余壽命預測[4]等.其中,構建能夠描述軸承真實健康狀態、量化退化趨勢的健康指標(Health indicator,HI),并實現剩余壽命預測是PHM 的關鍵技術之一.
過去幾年中,很多學者致力于軸承剩余使用壽命(Remaining useful life,RUL)預測方法的研究,這些方法大致分為兩大類: 基于模型驅動的方法和基于數據驅動的方法.基于模型驅動的方法通過構建一個可以精確描述軸承退化過程的物理或數學模型來實現軸承RUL 預測,主要包括粒子濾波[5]、艾林模型[6]、韋布爾分布[7]等方法.構建過程不僅需要經過一系列測量后的實際工程系統的參數,還需要廣泛的先驗知識.基于模型的方法雖然有助于預測機械退化的總體趨勢,但是在實際工業應用中,特別是對于復雜的機械設備,很難用簡單的物理或數學模型精確地模擬其退化趨勢.隨著智能傳感技術與機器學習技術的快速發展,工業生產中采集了大量的狀態監測數據,使得數據驅動的方法快速發展.基于數據驅動的RUL 預測方法根據大量軸承歷史數據對退化特征進行建模,主要分為3 個步驟:1) 數據采集;2)健康指標構建;3) RUL 預測.其中,構建符合軸承退化趨勢的健康指標是預測RUL的核心,直接影響預測準確性.Yang 等[8]采用自組織映射(Self organizing maps,SOM)融合特征構建健康指標,并引入縮放參數統一失效閾值,最后利用粒子濾波器預測RUL.Hong 等[9]采用小波包-經驗模態分解進行特征提取,然后利用SOM 進行特征融合,所得健康指標能夠有效表示性能退化,實現軸承RUL 預測.以上方法相較于均方根、峰值、熵等單一特征可以更有效地表示軸承退化趨勢,實現RUL 預測.但仍然需要手工選取特征,依賴專家經驗.
隨著Hinton 等[10]提出深度學習理論以來,一些學者利用深度神經網絡強大的特征提取能力構建健康指標實現RUL 預測.Guo 等[11]選取6 個相似性特征與8 個經典時頻特征相結合,形成原始特征集,然后利用單調性和相關性度量選擇最敏感的故障特征,通過循環神經網絡(Recurrent neural network,RNN) 構建健康指標實現軸承RUL 預測.Chen 等[12]提出了一種基于編碼器-解碼器(Encoder-decoder)和注意力機制(Attention mechanism)的RNN 來構建健康指標,然后通過線性回歸方法預測RUL.王久健等[13]提出一種空間卷積長短期記憶神經網絡(Convolutional long short-term memory neural network,ConvLSTM)的健康指標構建方法,并利用粒子濾波器更新雙指數壽命模型,實現RUL 預測.康守強等[14]通過改進稀疏自動編碼器(Sparse auto encoder,SAE)對軸承振動信號進行無監督深層特征自適應提取,將其作為軸承的性能退化特征,并利用雙向長短期記憶網絡(Bidirectional long short-term memory network,Bi-LSTM)預測軸承RUL.雖然深度學習方法在該領域中取得一定進展,但依賴大量數據進行訓練,存在魯棒性與泛化性較差的問題,難以應用于工程實踐.元學習[15]能利用已學習的信息,快速適應未學習的新任務,使用少量訓練樣本即可得到較好的模型參數,為解決上述問題提供了新視野.因此,元學習逐漸成為故障診斷領域中熱門的研究方向之一.元學習主要包括學習度量空間、學習初始化和學習優化器等方法,其中基于度量的元學習方法主要包含孿生網絡[16]、匹配網絡[17]、原型網絡[18]以及關系網絡[19]等方法.孿生網絡、匹配網絡、原型網絡均使用固定的距離度量方式實現小樣本分類,如歐氏距離、余弦距離等.而Sung 等[19]提出的關系網絡由嵌入函數與關系函數組成,其中,嵌入函數用于提取樣本特征,關系函數為卷積網絡,用于計算樣本特征之間的相似性,從而實現小樣本分類.由于關系網絡是對度量方式進行直接學習,實現對樣本間距離的更準確的表達,避免了人為選取度量方式的弊端.起初,關系網絡應用于圖像識別[20-21]任務中,隨著進一步的發展,很多學者將關系網絡用于機械設備故障診斷中.Wu 等[22]通過機械故障診斷遷移學習任務驗證了關系網絡在小樣本學習中的優勢.呂楓等[23]利用關系網絡設計了一種偽標簽學習策略,進行樣本集擴充,實現半監督學習機械故障診斷.
目前,尚未見到利用關系網絡進行壽命預測的論文,本文利用元學習方法在少量訓練樣本下可以快速學習新任務的優點,利用關系網絡度量的特性,通過度量軸承運行狀態與初始狀態之間的相似性來進行剩余壽命預測,提高壽命預測的準確性.綜上所述,本文提出一種利用關系網絡構建健康指標并進行RUL 預測的方法.首先通過關系網絡的嵌入模塊提取特征,然后將初始狀態特征與運行狀態特征進行拼接,通過關系模塊計算兩者的相似性,完成健康指標構建.最后對健康指標進行Savitzky-Golay 濾波平滑處理,并采用線性函數擬合方法預測軸承RUL.實驗結果表明,基于關系網絡模型所得的健康指標能夠準確表示軸承性能退化趨勢,所得RUL 預測結果與ConvLSTM、Transformer、RNN、卷積神經網絡(Convolutional neural network,CNN)+長短期記憶網絡(Long short-term memory network,LSTM)、Encoder-decoder+Attention mechanism 等方法相比,誤差百分比分別減少了1.68%,3.41%,9.03%,13.72%,30.49%,體現出關系網絡在解決小樣本問題中的優越性.
本文的其余部分結構如下: 第1 節介紹了關系網絡等相關知識;第2 節介紹了關系網絡模型的結構以及基于關系網絡的剩余壽命預測方法;第3 節在實測軸承全壽命周期數據集上驗證所提方法的有效性,并與其他方法進行對比;第4 節概述了本文所得結論和對未來的展望.
1 相關知識
1.1 關系網絡
關系網絡最初用于小樣本條件下的圖像分類,與傳統深度神經網絡需要大量樣本訓練不同,該網絡能在少量訓練樣本情況下,取得較好的圖像分類結果.
關系網絡的結構如圖1 所示,包含嵌入模塊和關系模塊,是一種端到端的結構.嵌入模塊用來提取輸入樣本的特征;關系模塊用來度量兩個特征之間的相似性,得到關系得分.
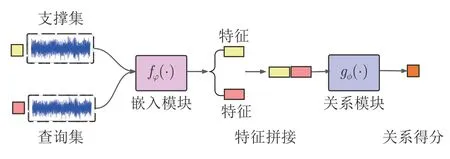
圖1 關系網絡結構Fig.1 Relation network structure
在關系網絡中,首先將支撐集樣本xi與查詢集樣本xj輸入到嵌入模塊fφ(·)中,得到樣本xi和xj的特征向量
式中,Fi和Fj為輸入樣本xi和xj的特征向量,fφ(·)為嵌入模塊,φ為相應的參數.
然后,通過拼接運算符Z將Fi和Fj拼接在一起,計算式為
式中,rij表示xi與xj之間的相似性,g?(·) 為關系模塊,?為相應的參數.
損失函數采用均方誤差(Mean square error,MSE),計算式為
1.2 Savitzky-Golay 卷積平滑算法
Savitzky-Golay 濾波器是一種低通濾波器,由Savitzky和Golay[24]于1964 年提出,廣泛運用于數據降噪.主要計算過程如下:
1) 定義一組數據為y(i),i-m,···,0,···,m,其n階擬合多項式為
式中,b為多項式的系數,n為多項式的階數,i為多項式的權數,E(n,i) 為關于n階的多項式函數.
2)數據y(i)與擬合的多項式間的均方誤差ξD為
3)要使均方誤差最小,則ξD各項系數的導數均應為0,即
將式(7)代入式(8),展開后可得
通過求解式(9),可求出多項式各項系數bk,從而得到擬合的n階多項式E(n),即可得到平滑后的數據.
2 基于關系網絡的剩余使用壽命預測
2.1 基于關系網絡的軸承健康評估模型
本文提出一種關系網絡模型,其中,嵌入模塊與關系模塊的網絡結構如圖2 所示.嵌入模塊采用基本的卷積神經網絡結構,以便于衡量關系網絡的性能.嵌入模塊由4 個卷積層和3 個池化層組成.第1 個卷積層采用了 1×10 的大卷積核,目的是從原始振動信號中提取較大范圍的特征.其他卷積層使用 1×3 的小卷積核,便于提取局部信息,并且可以減少網絡參數量與計算復雜度.每層卷積后都會進行批標準化(Batch normalization,BN)和線性整流函數(Rectified linear unit,ReLU)激活,BN可以加速訓練,避免梯度爆炸;ReLU 激活函數可以將負值置零,具有較強的非線性能力.前兩個池化層采用最大池化,保留主要特征的同時減少參數量和計算量.第3 個池化層采用自適應池化,用于固定嵌入模塊的輸出大小,減少尺寸不匹配的問題出現.
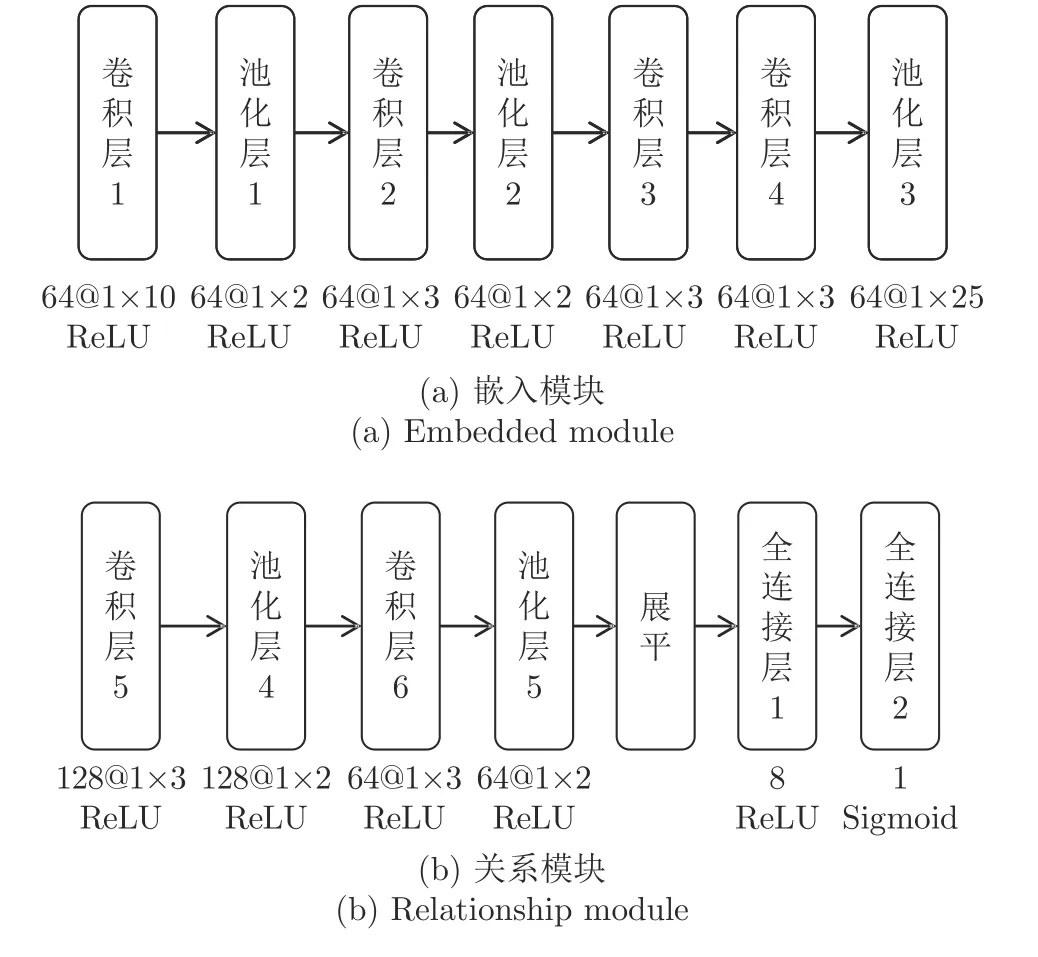
圖2 關系網絡模型結構Fig.2 Structure of relational network model
關系模塊由2 個卷積層、2 個池化層和2 個全連接層組成.每個卷積層中使用1×3 的小卷積核,從輸入特征圖中獲取局部信息.最后一層采用Sigmoid 激活函數,以便得到兩個輸入樣本之間的相似性,獲取關系得分.
2.2 基于關系網絡的軸承RUL 預測方法
基于關系網絡的軸承RUL 預測方法流程如圖3所示,首先利用關系網絡模型構建健康指標,然后預測RUL.具體步驟如下:
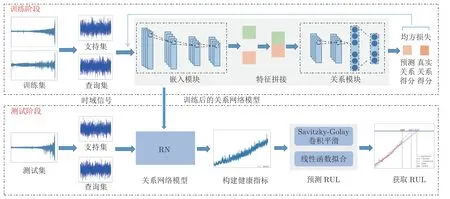
圖3 基于關系網絡的軸承RUL 預測流程Fig.3 Bearing RUL prediction process based on relation network
步驟 1.采集不同工況運行條件下軸承全壽命振動加速度信號,劃分為訓練集和測試集,并將軸承的初始時刻樣本作為支撐集,剩余樣本作為查詢集.
步驟 2.將訓練集中支持集樣本與查詢集樣本作為模型的輸入,將壽命百分比值(當前使用壽命與全壽命的比值)作為模型輸出標簽.模型進行有監督的訓練,輸入輸出標記形式為Dtrain其中,xtRN×S為S個時間步長的采樣數據,采樣數據長度為N;yt[0,1] 為時間t所對應的壽命百分比值.將真實標簽與預測標簽之間的均方誤差作為損失函數值,利用誤差反向傳播算法進行訓練,獲取模型參數.
步驟 3.將測試集中支持集與查詢集樣本輸入訓練好的關系網絡模型,計算兩者之間的關系得分,作為軸承健康指標.
步驟 4.為降低振蕩對預測結果的影響,減少預測誤差,采用Savitzky-Golay 濾波器對獲取的健康指標進行平滑處理,得到平滑后的健康指標.
步驟 5.采用一次線性函數對平滑后的健康指標進行擬合,并通過與失效閾值交點所對應的時刻對軸承的RUL 進行預測.
關系網絡模型構建健康指標方法的偽代碼見算法1 所示:
算法1.關系網絡模型構建健康指標算法
3 實驗
3.1 數據集
本文選取PHM2012 滾動軸承加速壽命實驗數據集[25]進行驗證.該數據集來自PRONOSTIA 實驗臺,實驗臺如圖4 所示,能夠在幾個小時的時間內完成軸承性能退化實驗.數據集如表1 所示,包含3 種工況,共 17 個軸承,工況1 轉速為1 800 r/min,徑向力為4 000 N;工況2 轉速為1 650 r/min,徑向力為4 200 N;工況3 轉速為1 500 r/min,徑向力為5 000 N.利用兩個加速度傳感器采集軸承水平方向與垂直方向的原始振動信號,采樣頻率為25.6 kHz,每隔10 s 采樣一次,每次采樣時長為0.1 s.其中,水平方向振動信號能夠比垂直方向振動信號提供更多的有用信息來跟蹤軸承退化[26-27].因此,本文使用水平方向振動信號進行實驗.
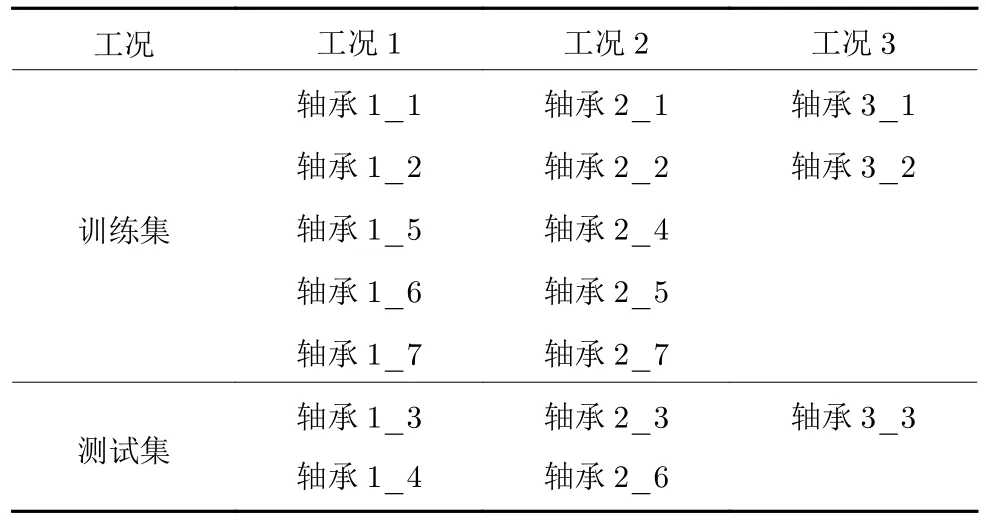
表1 PHM2012 軸承數據集Table 1 PHM2012 bearing dataset
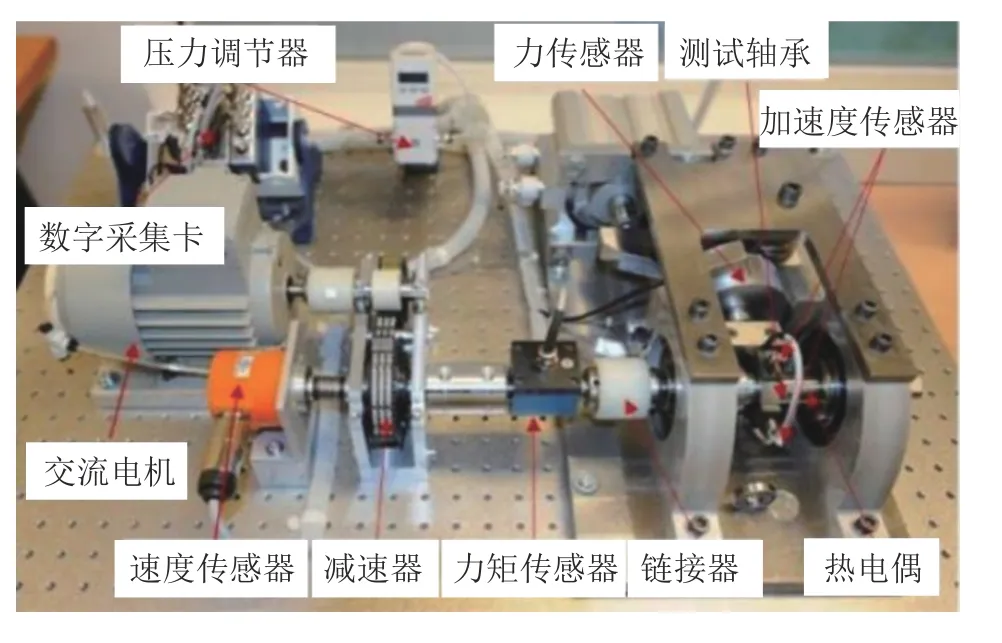
圖4 PRONOSTIA 實驗臺Fig.4 PRONOSTIA test bench
3.2 軸承健康指標構建實驗與分析
為驗證本文所提方法的有效性,選取軸承1_3、1_4、2_3、2_6、3_3 的數據作為測試集進行測試,其余軸承數據作為訓練集進行訓練.經過實驗確定模型超參數取值,Batch size 為200,epoch 為200,學習率為0.0005,優化器為Adam.
針對軸承退化趨勢而言,不同工況下不同軸承的退化趨勢不同,如圖5 所示為軸承1_3 與軸承2_6 水平方向的時域振動信號,其中 g 表示重力加速度.從圖5(a)中可以看出,軸承1_3 在運行過程中幅值緩慢發生變化,故障位置不太明顯,退化趨勢為緩慢退化型.從圖5(b)中可以看出,軸承2_6在運行過程中幅值突然發生變化,故障位置較為明顯,退化趨勢為突然失效型.因此,軸承的全壽命周期數據的退化趨勢不只是單一故障模式,可分為緩慢退化型與突然失效型的退化趨勢.
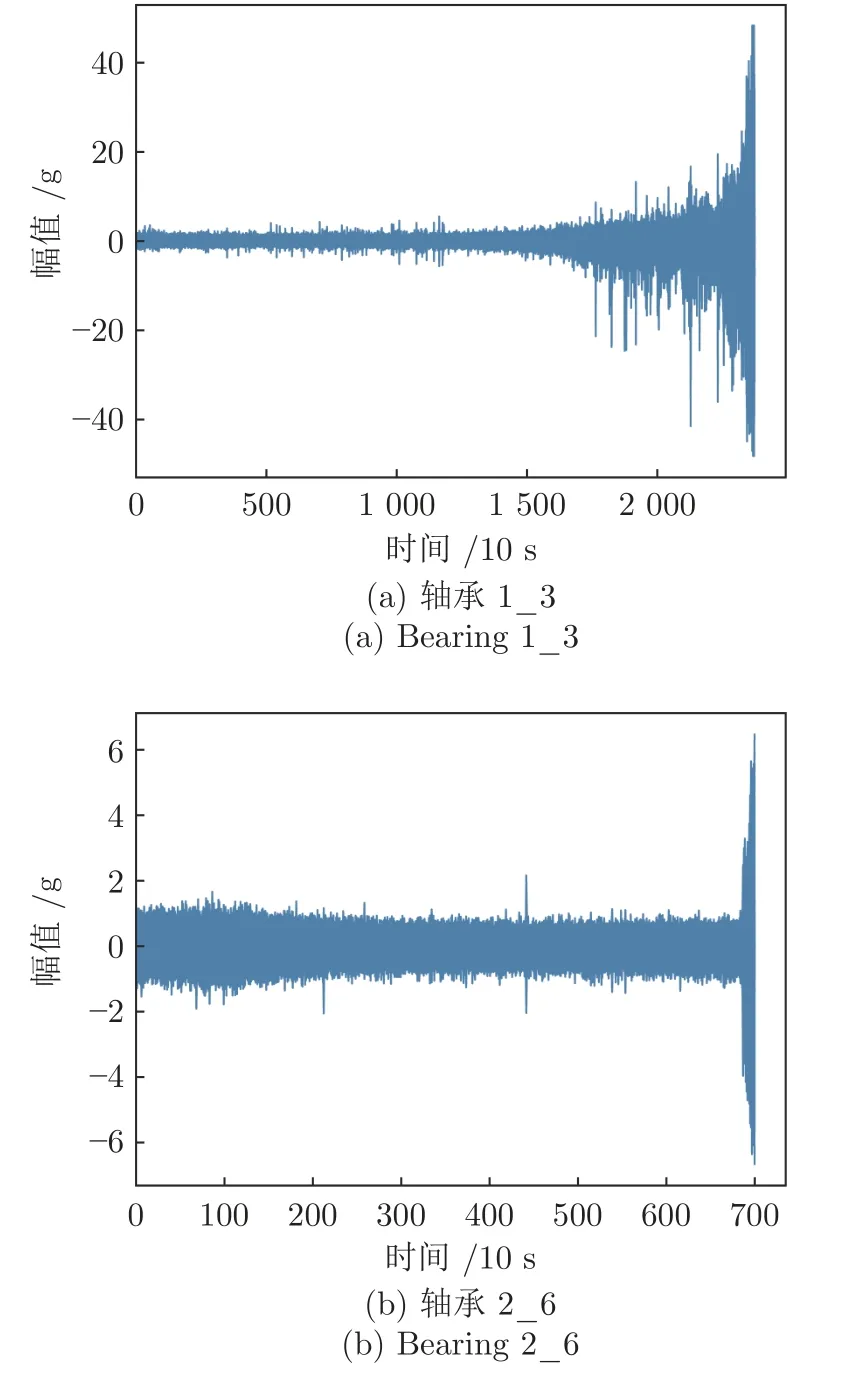
圖5 軸承時域振動信號Fig.5 Bearing time domain vibration signal
因不同工況運行條件下容易造成健康指標的范圍相異,不利于失效閾值的確定,導致難以實現RUL 預測.因此,為確定失效閾值的取值,采用6折交叉驗證法對訓練集軸承1_1、1_2、2_1、2_2、3_1、3_2 全壽命數據進行交叉驗證實驗,查看所得健康指標的范圍區間,確定失效閾值.首先,從中任意選取5 個軸承的全壽命數據進行模型訓練,將剩余的1 個軸承數據進行測試,獲得健康指標.然后,通過Savitzky-Golay 濾波器對獲取的健康指標進行平滑處理,得到最終的健康指標.最終,可獲得訓練集軸承平滑后的健康指標,結果如圖6 所示.訓練集軸承健康指標的范圍區間為[0,1],在初始時刻的健康指標值近似等于0,在失效時刻的健康指標值近似等于1,均能夠反映軸承運行過程中的退化趨勢,并且整體趨勢具有良好的單調性.因此,可將失效閾值確定為1,并且可根據健康指標的取值,描述軸承真實的健康狀態,量化軸承退化趨勢.
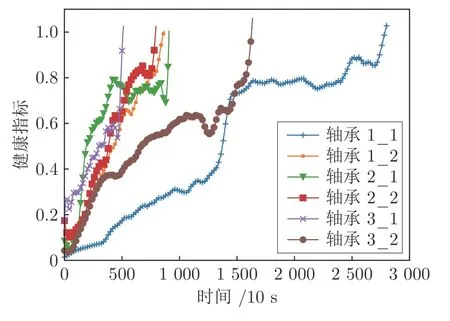
圖6 訓練集軸承健康指標Fig.6 Training set bearing health indicators
為驗證本文所提方法在兩種不同退化趨勢下的有效性,本文以軸承1_3和軸承2_6 為例,將軸承數據輸入關系網絡模型中,獲取軸承1_3和軸承2_6 的健康指標.并采用Savitzky-Golay 濾波器對獲取的健康指標進行平滑處理,得到最終的健康指標.最終,平滑前后的健康指標如圖7 所示.由圖7可看出,本文所提關系網絡模型構建的健康指標,無論是緩慢退化型還是突然失效型軸承,均能夠反映軸承運行過程中的退化趨勢,具有良好的單調性,但是存在局部振蕩現象.Savitzky-Golay 平滑濾波用擬合值代替原始數值,具有平滑原始數據序列的作用,可降低健康指標振蕩對RUL 預測結果的影響,減少預測誤差.因此,可利用平滑后的健康指標進行軸承RUL 預測.
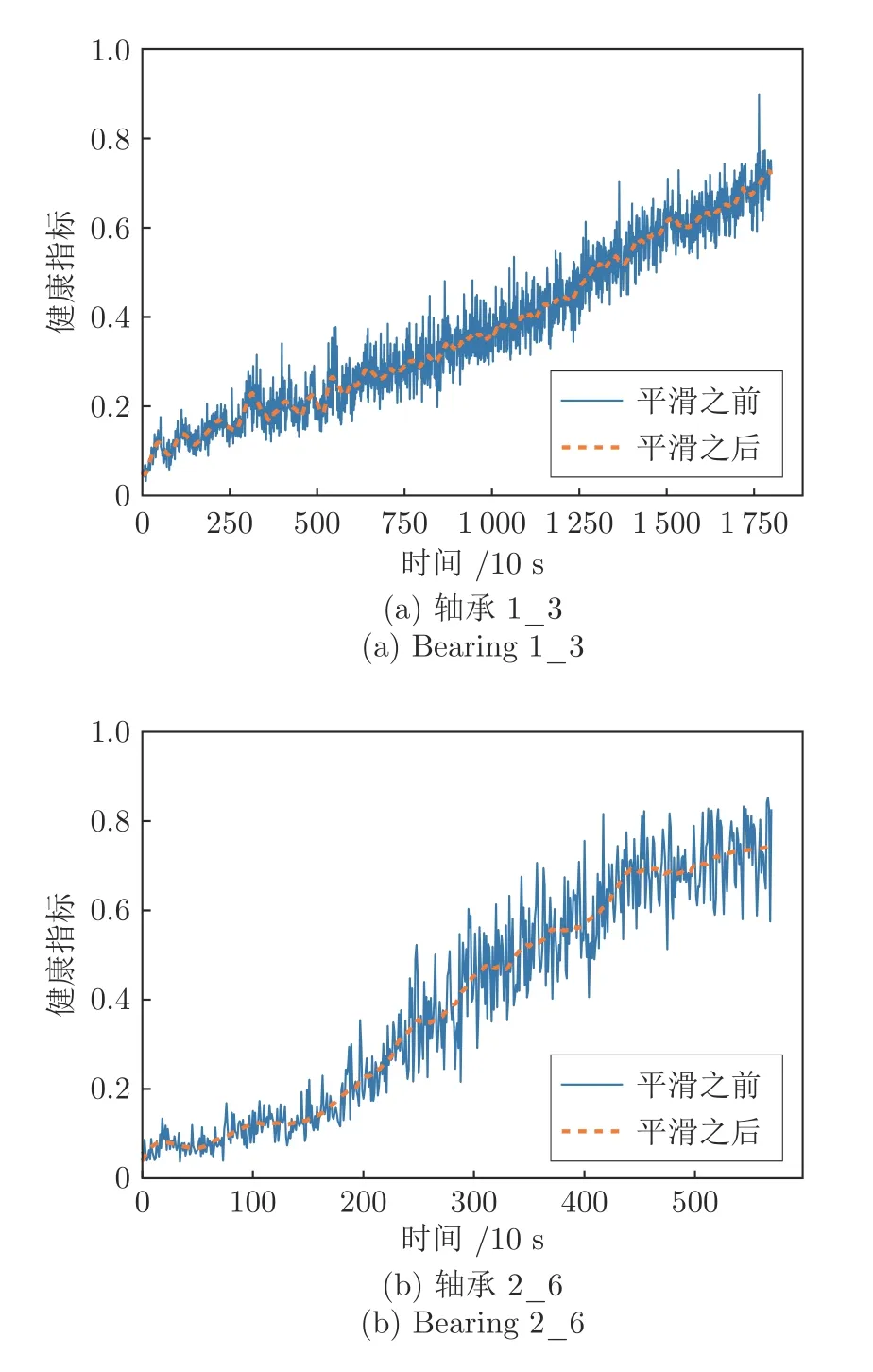
圖7 軸承健康指標Fig.7 Bearing health indicators
3.3 剩余使用壽命預測
使用本文提出的剩余壽命預測方法在測試集軸承上進行剩余使用壽命預測.由于訓練過程中模型輸出標簽為壽命百分比值,其符合一次線性函數關系式,因此,對測試集所得健康指標也采用了一次線性函數擬合的方法來預測RUL.
為驗證所提方法預測結果的好壞,本文通過計算預測剩余壽命與真實剩余壽命之間的誤差百分比Eri來進行評估,計算式為
式中,ActRULi為第i時刻的真實RUL,RULi為第i時刻的預測RUL.
以軸承1_3和軸承2_6 為例,其RUL 預測結果如圖8 所示.其中,虛點線為基于關系網絡模型所得平滑后的健康指標,虛線為一次函數擬合值,即預測健康指標,粗實線為失效閾值.圖8(a)為軸承1_3 的RUL 預測結果,可知軸承1_3 當前時刻壽命為18 010 s (由于軸承的第1 個樣本作為支持集,故圖中18 000 s 即為全壽命軸承中的18 010 s),實際失效時刻為23 740 s,根據失效閾值可得預測失效時刻為27 380 s,故其實際RUL 為23 740 s-18 010 s5 730 s,預測RUL 為27 380 s-18 010 s9 370 s,則誤差百分比為(5 730 -9 370)/5 730 ×100%=-63.53%.圖8(b)為軸承2_6 的RUL 預測結果,可知軸承2_6 當前時刻壽命為5 710 s,實際失效時刻為7 000 s,預測失效時刻為7 020 s,故其實際RUL 為7 000 s -5 710 s=1 290 s,預測RUL 為7 020 s -5 710 s=1 310 s,則誤差百分比為(1 290 -1 310)/1 290×100%=-1.55%.
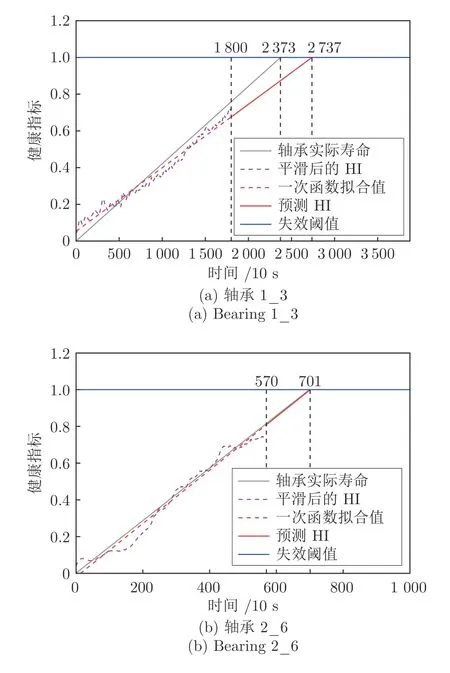
圖8 軸承RUL 預測結果Fig.8 Bearing RUL prediction results
為進一步驗證本文方法的有效性,將本文所提方法與ConvLSTM、Transformer、RNN、CNN+LSTM、Encoder-decoder+Attention mechanism 等方法進行對比,結果如下.
1) ConvLSTM[13]: 該方法采用ConvLSTM 模型構建健康指標,進而實現RUL.模型共8 層,包含3 層ConvLSTM 層、2 層池化層和3 層全連接層.其主要利用卷積神經網絡的局部特征提取能力和長短期記憶網絡的時間依賴特性,從原始信號中挖掘反映退化程度的特征,構建健康指標.
2) Transformer[28]: 利用Transformer 模型挖掘輸入特征與軸承剩余壽命之間復雜的映射關系,通過一次線性函數擬合的方法實現軸承RUL 預測.其中,Transformer 模型包含6 層編碼器和解碼器,并且編碼器和解碼器的各個子層之間均添加了殘差連接操作.
3) RNN[11]: 該方法首先選取6 個相似性特征和8 個經典時頻特征,然后,利用單調性和相關性度量選擇最敏感的故障特征,通過RNN 構建健康指標,最終,通過指數模型計算RUL.
4) CNN+LSTM[29]: 該方法提出一種基于CNN和LSTM 的端到端的軸承剩余壽命預測模型.該模型包含1 個卷積層、1 個全局平均池化層和1 個LSTM 層,并在全局平均池化層后加入Dropout.其主要利用卷積層進行特征提取,利用LSTM層預測RUL.
5) Encoder-decoder+Attention mechanism[12]:提取頻譜的5 個帶通能量值作為特征,采用基于Encoder-decoder和Attention mechanism 的RNN 來構建健康指標,最后通過線性回歸方法得到最終RUL值.該模型利用卷積層進行特征提取,將雙向門控循環神經網絡作為編碼器,帶有自注意力機制的門控循環神經網絡作為解碼器進行RUL 預測.
本文計算了所提方法與ConvLSTM、Transformer、CNN+LSTM 等方法的模型參數量,如表2所示.從表2 中可以看出,本文所提方法的參數量只有 78.61k,與ConvLSTM、Transformer、CNN+LSTM 的參數量相比,分別減少了 64.35%、98.78%、93.08%.
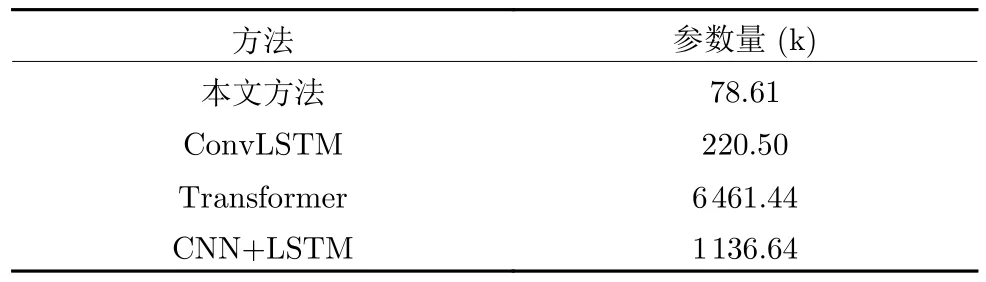
表2 不同模型參數量對比Table 2 Comparison of different model parameters
測試集軸承RUL 預測結果以及誤差百分比如表3 所示.從表3 中可以看出,本文方法所得誤差百分比為24.24%,與ConvLSTM、Transformer、RNN、CNN+LSTM、Encoder-decoder+Attention mechanism 等方法相比,分別減少1.67%,3.40%,9.02%,13.71%,30.48%.因此,本文方法在模型參數量較小的情況下,所得誤差均值更低.分析關系網絡優于其他方法原因,ConvLSTM、Transformer、RNN、CNN+LSTM、Encoder-decoder+Attention mechanism 等深度學習方法需要大量訓練樣本才能學習到輸入數據與軸承剩余壽命之間復雜的映射關系,實現RUL 預測.而關系網絡方法是一種元學習方法,可以在少量訓練樣本下,通過學習軸承初始狀態特征與軸承運行特征之間的相似性,實現軸承RUL 預測.因此,在軸承全生命數據較少的情況下,關系網絡方法能夠更準確地預測RUL 值.
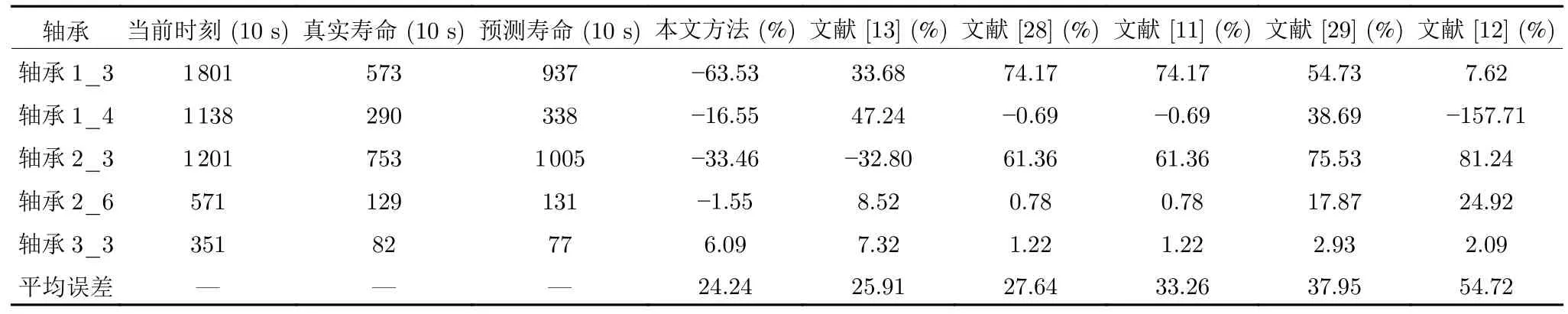
表3 軸承RUL 預測結果Table 3 Bearing RUL prediction results
4 總結與展望
針對軸承剩余壽命預測問題,本文提出一種基于關系網絡的RUL 預測方法,并在軸承數據集上進行實驗.主要結論如下.
1)關系網絡的方法可以應用于軸承剩余使用壽命預測,其中的關系得分可以用來表示軸承的健康狀況.由于軸承的全壽命數據很難得到,關系網絡體現出在解決小樣本問題上的優越性,取得較好的壽命預測效果,可以更好地應用于工程實踐.
2)關系網絡中的嵌入模塊可有效提取軸承的健康狀態特征,與其他度量方式相比,關系模塊可以更加準確地度量特征間的相似性.
3)對于緩慢退化型與突然失效型兩種退化趨勢,本文所構建健康指標均能夠反映軸承運行過程中的退化趨勢.
4)本文所得RUL 預測結果接近真實壽命值,所得誤差百分比均值為24.24%,與其他RUL 預測方法相比,本文方法的誤差均值更低.
為比較關系網絡的性能,本文嵌入模塊采用了基本的卷積神經網絡結構,進一步研究工作可以采用其他嵌入模塊結構,更好地提取軸承狀態特征,提高軸承剩余壽命預測的準確性.由于在實際工業生產中軸承振動數據獲取困難,因此本文所提方法在實際軸承數據集中的效果需要進一步驗證.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
兒童故事畫報(2019年5期)2019-05-26 14:26:14
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
核科學與工程(2015年4期)2015-09-26 11:59:03
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56