辣椒穴盤苗取苗栽植過程動力學分析與試驗
2023-08-04 16:16:09胡雙燕胡敏娟張文毅葛迅一
中國農機化學報 2023年7期
胡雙燕 胡敏娟 張文毅 葛迅一

摘要:辣椒穴盤苗夾莖式取苗過程中,取苗成功率與栽植直立度是評價栽植質量的重要指標。為探究影響栽植質量的主要因素,通過幾何方法確定穴盤苗質心,將取苗運動軌跡分為取苗、持苗、栽植、回程四個階段,分析穴盤苗質心在前三階段的受力情況,建立穴盤苗質心在取苗點、脫盤點、栽植點三大關鍵點處的受力方程式,運用MatLab軟件繪制質心在取苗-栽植運動過程中的受力關系曲線,分析關鍵點處穴盤苗莖稈的受力情況與穴盤苗姿態。確定影響栽植質量的主要因素為:穴盤苗質量、機構轉速、夾持裝置與穴盤苗莖稈之間的摩擦系數。通過控制變量法得到各因素的臨界條件:穴盤苗質量臨界值為8.34g,機構轉速臨界值為105.4r/min,夾持部件摩擦系數臨界值為0.147。通過Box-Behnken響應曲面試驗,得到三個因素最優參數組合:穴盤苗質量5.20g,機構轉速68r/min,夾持部件與穴盤苗莖稈之間的摩擦系數為0.36,最優運移成功率91.04%。
關鍵詞:辣椒;受力分析;動力學模型;臨界條件;參數優化
中圖分類號:S223.9
文獻標識碼:A
文章編號:20955553 (2023) 070040
09
Dynamic analysis and experiment of seedling taking and planting process of pepper hole tray
Hu Shuangyan1, Hu Minjuan2, Zhang Wenyi2, Ge Xunyi1
(1. Jiangsu Agricultural Machinery Development and Application Center, Nanjing, 210017, China;
2. Nanjing Institute of Agricultural Mechanization, Ministry of Agriculture and Rural Affairs, Nanjing, 210014, China)
Abstract:? The success rate of seedling selection and the erect degree of planting are important indicators to evaluate the planting quality in the process of pepper seedling selection. In order to explore the main factors affecting planting quality, the centroid of the hole tray seedlings was determined by the geometric method. The movement track of the hole tray seedlings was divided into four stages: seedling, picking, holding, and planting return. Force equations of the hole tray seedling centroid at the three key points of the seedling picking point were established to analyze the force of the hole tray seedlings centroid in the first three stages. MatLab was used to draw the force relation curve of the centroid in the process of seedling extraction and planting, and analyze the force situation and the position of the hole tray seedlings at key points. The results showed that the main factors affecting the planting quality were the hole tray seedling quality, the rotational speed of the mechanism, and the friction coefficient between clamping parts and the stem of the hole tray seedling. The critical conditions of each factor were obtained using the control variable method. The critical value of the hole tray seedling quality was 8.34 g. The critical speed of the mechanism was 105.4 r/min. The critical value of the friction coefficient of the clamping part was 0.147. According to the Box-Behnken response surface test, the optimal parameter combination of three factors were: the quality of the hole tray seedling was 5.20 g, the rotational speed of mechanism was 68 r/min, and the friction coefficient between clamping parts and the stem of hole tray seedling was 0.36. The optimal migration success rate was 91.04%.
Keywords: pepper; force analysis; dynamical model; critical condition; parameter optimization
0 引言
辣椒、番茄等茄果類蔬菜是人們日常餐桌中不可缺少的蔬菜類型。中國辣椒種植面積占世界總面積的40%,截止到2020年4月份,中國有28個省進行辣椒的種植[1]。超過半數的辣椒種植采用育苗移栽[2]的方式,以人工移栽和使用半自動移栽機為主,人工移栽勞動量大,效率低下[3]。半自動移栽機的工作效率可以達到人工效率的3~5倍,但是使用過程中需要配備3~4名工人,成本較高且回收周期長[4]。
全自動穴盤苗移栽機研究重點是設計出可以植苗的取苗機構,是實現移栽全程自動化的關鍵[5]。對穴盤苗進行機理性質[67]進行研究,可掌握其生物學特性與力學特性,為取苗機構的動力學分析提供移栽對象特性參數。繆小花等[89]利用黃瓜穴盤苗,研究拉拔力與基質性質的關系,進行平板壓縮、加卸載循環和蠕變試驗,研究穴盤苗缽體的壓縮特性和塑變能力,為夾缽式取苗提供理論數據。劉姣娣等[10]利用番茄穴盤苗作為研究對象,研究缽體抗壓強度、基質破碎壓縮量等因素,構建缽體力學模型,確定夾缽式取苗的最適夾持部位以及影響取苗、植苗成功率的因素,為番茄缽苗移栽機夾缽式自動取苗機構的設計提供重要依據。與穴盤苗移栽相關的力學特性的研究主要是集中在與夾缽式取苗相關的缽體的各項力學特性[1112],與夾莖式取苗相關的力學特性研究較少。宋琦等[13]以茄果類穴盤苗作為研究夾拔力測試實驗對象,發現茄果類穴盤苗盤根較好,莖稈抗拉斷性能很好,不易拉斷。南京農業機械化研究所在水稻移栽的五桿雙曲柄分插技術的基礎上,通過試驗驗證了水稻單穴內拉拔力小于抗拉斷力,證明了夾莖式取苗方式能夠應用于水稻移栽過程中,通過對栽植軌跡的優化,能保證良好的立苗效果。本研究借鑒夾莖式移栽的經驗,根據前期研究夾莖式取苗相關的力學參數設計出辣椒穴盤苗夾莖式取苗機構。
夾莖式取苗機構除了保證移栽頻次之外,還需要考慮穴盤苗運動姿態與栽植立苗質量[1416]。陳建能等[1718]基于偏心橢圓齒輪行星輪系栽植裝置構建擺桿與栽植嘴的動力學模型,將缽苗在栽植器的運動分為碰撞、下滑兩個階段,對缽苗進行姿態分析并加以驗證。金鑫等[19]在此基礎上,將缽苗的運動細分為6個階段,探究高速作業條件下缽苗栽植的運動機理。胡喬磊等[2021]以油菜基質塊苗作為研究對象,對載苗基質塊進行力學、生物學特性研究,針對油菜毯狀苗在移栽過程中出現脫苗現象,構建了栽植過程中運移苗階段油菜毯狀苗苗塊的動力學模型。本研究以蕭新19號甜椒為研究對象,研究辣椒穴盤苗形態特征與力學特性,為夾莖式取苗、栽植過程中分析穴盤苗植株的受力情況和姿態變化提供理論基礎,構建夾莖式取苗栽植過程的動力學模型,確定影響移栽質量的主要因素,并優化得到影響因素的最佳參數組合。
1 夾莖式取苗過程動力學分析的理論基礎
1.1 取苗機構與工作原理
夾莖式取苗機構采用雙曲柄連桿式機構,由齒輪、主曲柄、副曲柄、連桿、末端執行機構組成。如圖1所示,齒輪為原動件與驅動軸相接,兩齒輪分別做反方向轉動。曲柄分別與兩齒輪固接,隨著齒輪的轉動,連桿在曲柄的帶動下,保持在一個平面內按照運動軌跡往復運動。末端執行機構依靠凸輪實現夾持手爪的張合,完成對辣椒穴盤苗莖稈的夾取與釋放。
運動軌跡包括取苗、持苗、栽植、回程四個部分,夾持手爪夾緊莖稈后,將攜帶基質塊的穴盤苗拔取脫盤,沿運動軌跡進行持苗移栽動作,持苗動作流暢,穴盤苗姿態呈直立狀態,運移至栽植點。到達栽植點,夾持手爪張開,釋放穴盤苗,穴盤苗栽入定植溝內。回程階段夾持手爪保持張開,快速歸位至取苗點,進行下一周期的取苗動作。
1.2 單株穴盤苗質心位置的確定
夾莖式取苗栽植過程動力學分析的首要任務是需要確定辣椒穴盤苗的質心,即確定受力分析的作用點。研究辣椒穴盤苗植株的形態特征和質量分布,獲得準確的辣椒穴盤苗質心的坐標,保證夾莖式取苗動力學分析的準確性。
育苗穴盤規格:穴盤為128孔,高度為45 mm,孔穴為正方形錐體,上、下孔邊長分別為32 mm、14 mm。育苗基質為進口泥炭、珍珠巖、蛭石體積比7∶2∶1。溫度白天控制在32 ℃以下,夜間控制在25 ℃以下,輔以澆水噴施育苗專用肥。用于本研究的辣椒穴盤苗形態參數如表1所示。
育苗過程中產生的邊際效應的影響,會造成各個植株的質量存在差異,整個穴盤苗的質量范圍為4.22~6.39 g,基質質量范圍為2.26~4.12 g,裸苗質量范圍為1.06~3.20 g。在整個穴盤苗的質量占比中,基質質量占比約為60%,植株質量占比約為40%。根據各部分占比構建單株穴盤苗簡化模型如圖2所示,最后確定質心位置C0。
根據菱形質心公式可求出苗冠的質心C1,根據等腰梯形質心公式可求出基質的質心C2。
(s/h2)-lAB+lCD×h1=s
(1)
式中:
s——
基質橫切面面積,mm2;
lAB——基質下底面邊長,mm;
lCD——基質上表面邊長,mm;
h1——
質心C2到缽體下表面的距離,mm;
h2——
質心C2到缽體上表面的距離,mm。
將穴盤苗各形態特征參數代入,可得到h2。根據多邊形質心
x0=m1x1+m2x2m1+m2
(2)
式中:
m1——苗冠質量,g;
m2——基質質量,g;
x1——
質心C1到C0之間的距離,mm;
x2——
質心C2到C0之間的距離,mm。
將C1與C2的坐標代入,得到單株穴盤苗的質心C0的位置到基質上表面的距離為33.5 mm。
2 取苗栽植過程動力學分析
2.1 取苗機構的運動學模型
取苗機構末端端點形成的運動軌跡即為辣椒穴盤苗的移栽軌跡,為分析取苗過程中穴盤苗的受力情況與運動姿態變化,建立取苗機構末端端點的運動學模型。
建立圖3所示直角坐標系xOy,兩個齒輪的傳動比為1,速率關系恒定。已知常量為桿AE與EF之間的夾角γ、桿件AB與AE之間的夾角θ、曲柄OA、DC的初始相位角分別為α1、α2,各個桿件的長度l1、l2、l3、l4、l5、l6,兩直齒圓柱齒輪的直徑D。變量為曲柄轉動的角度φ1、φ2,定義所涉及的角度逆時針為正方向。
根據向量位移關系可得到A點的位移方程,如式(3)所示。
xA=l1cos(α1+φ1)
yA=l1sin(α1+φ1)
(3)
根據向量關系OA+AB=OD+DC+CB,聯立方程
xB=xA+l2cosφ5=xC+l3cos(-φ3)
yB=yA+l2sinφ5=yC+l3sin(-φ3)
(4)
式中:
φ5——
桿件AB轉過的角度,(°);
φ3——
桿件BC轉過的角度,(°)。
F點的位移方程
xF=xA+l5cosφ4+l6cosφ6
yF=yA+l5sinφ4-l6sinφ6
(5)
式中:
φ4——
桿件AE轉過的角度,(°);
φ6——
桿件EF轉過的角度,(°)。
φ6=2π-γ-(π-φ4)=π+φ4-γ,將φ4=θ-(2π-φ5)代入可得:φ6=θ+φ5-γ-π。
將式(5)對時間t求兩階導,得到F點的加速度方程。
ax=
-l12cos(α1+φ1)+
l5[sin(φ4)φ″4+cos(φ4)φ′4]-
l6[sin(φ6)φ″6+cos(φ6)φ′6]
ay=
-l12sin(α1+φ1)+
l5[cos(φ4)φ″4-sin(φ4)φ′4]-
l6[cos(φ6)φ″6-sin(φ6)φ′6]
(6)
式中:
ω——曲柄旋轉的角速度,rad/s。
2.2 取苗機構末端端點與質心坐標變換
單株穴盤苗的質心C0與取苗機構末端端點F之間存在尺寸關系,設C0與F之間的偏移坐標為(xc,yc),建立坐標變換方程,便于后續分析穴盤苗受力情況。為了簡化穴盤苗的受力關系,以質心C0為原點,垂直于桿件EF為x軸,建立起參照坐標系,如圖4所示。
lC=(lFcosα-xc)2+(lFsinα-yc)2
(7)
αc=arctanlFsinα-yclFcosα-xc
(8)
式中:
lF——
取苗機構末端端點到曲柄旋轉中心O的距離,mm;
α——
末端端點、曲柄旋轉中心連線與曲柄OA之間的夾角,(°);
xc、yc——
質心C0的橫、縱坐標,mm;
αc——
質心、曲柄旋轉中心連線與末端端點、曲柄旋轉中心連線之間的夾角,(°)。
曲柄OA、DC的初始相位角分別為150°與300°,求出α=22°。
根據牛頓第二定律可知,穴盤苗隨取苗機構運動過程中的受力關系
Fx=
-l1m2cos(α1+φ1)+
ml5[sin(φ4)φ4″+cos(φ4)φ4′]-
ml6[sin(φ6)φ6″+cos(φ6)φ6′]
Fy=
-l1m2sin(α1+φ1)+
ml5[cos(φ4)φ4″-sin(φ4)φ4′]-
ml6[cos(φ6)φ6″-sin(φ6)φ6′]
(9)
式中:
Fx——
穴盤苗在絕對坐標下沿x軸方向的分力,N;
Fy——
穴盤苗在絕對坐標下沿y軸方向的分力,N;
m——單株穴盤苗的質量,g。
穴盤苗質心C0隨取苗機構運動過程中的受力關系表達式轉變為
Fx′=Fxcosφ+Fysinφ
Fy′=Fxsinφ+Fycosφ
(10)
φ=π-α-φ1+αc
(11)
式中:
φ1——
每一時刻曲柄轉動的角度,(°)。
2.3 取苗栽植過程中穴盤苗質心受力分析
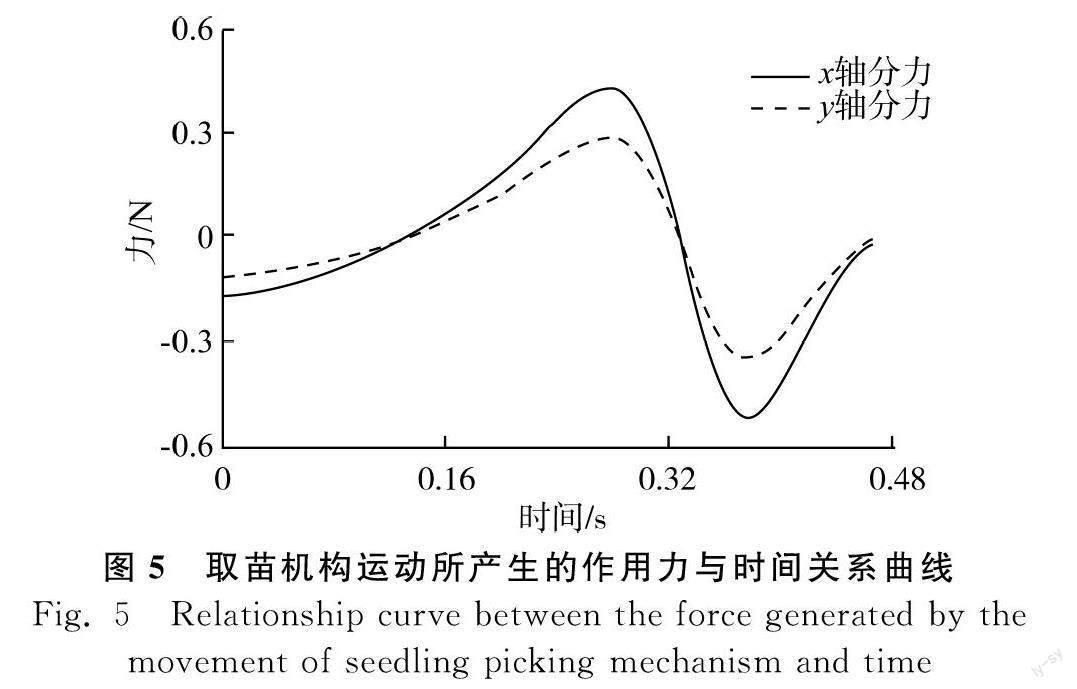
運用MatLab建立穴盤苗在取苗栽植過程中的質心點C0處水平加速度ax、豎直加速度ay與時間t之間的函數關系。通過牛頓第二定律得到參照坐標系下穴盤苗受到取苗機構運動所產生的作用力F,分解為x軸方向的分力Fx′與y軸方向的分力Fy′。在MatLab中繪制出參考坐標系下,質心C0處x軸方向的分力Fx′與y軸方向的分力Fy′與時間的關系曲線,如圖5所示。
取苗栽植運動過程中,穴盤苗受到x軸方向的分力Fx′和y軸方向的分力Fy′變化趨勢基本一致:負方向力的數值逐漸減小到0,正方向力的數值逐漸增大到極值;然后正方向力的數值逐漸減小到0,負方向力的數值逐漸增大到極值,再由極值逐漸減小到0。假設G與y軸之間的夾角為β,x軸方向的分力Fx′與穴盤苗重力G在x軸的分力G·sinβ之間的關系,可以分為以下三種情況。
Fx′與G·sinβ同向
Fx′與G·sinβ不同向
Fx′≥G·sinβ
Fx′ 同理可得y軸方向的分力Fy′與G在y軸的分力G·cosβ之間的關系 Fy′與G·cosβ同向 Fy′與G·sinβ不同向 Fy′≥G·cosβ Fy′ 3 取苗栽植關鍵點處的力學方程 3.1 測定穴盤苗基質與穴盤之間的粘附力 試驗材料:選用基質完好、長勢良好的適栽期蕭新19號辣椒穴盤苗。 試驗儀器:INSTRON3343型單立柱電子萬能材料試驗機,量程為0~1 kN,由計算機控制自動完成加載、卸載及數據采集與分析。 利用夾具將辣椒穴盤苗采用夾持莖稈的方式固定于萬能材料試驗機的測試裝置上,保持莖稈與水平面垂直,將下方的苗缽利用夾具固定,既不隨拉力的作用向上移動,也不會橫向擠壓穴盤。加載方式為靜力加載,將穴盤苗完整從穴盤中取出,即為試驗結束,記錄粘附力、彈性模量,試驗重復20次,結果如表2所示。 3.2 取苗栽植過程中關鍵點處力學條件方程 取苗、持苗、栽植三個階段中每個階段都存在一個關鍵點,分別是取苗點、脫盤點、栽植點,分析三個關鍵位置點處穴盤苗的受力情況,有利于更好的分析夾莖式取苗栽植過程中穴盤苗的姿態情況,受力情況如圖6所示。 取苗機構的轉速設置為60 r/min,由圖6(a)可知,時間為0 s時,該點為取苗點,即第一關鍵點。此時Fx′與G·sinβ同向,方向為參考坐標系的x軸的負方向,且Fx′≥G·sinβ,x軸方向的合力為負;此時Fy′與G·cosβ不同向,且Fy′≥G·cosβ,取苗點處,基質與穴盤之間存在粘附力τ,方向為y軸正方向,根據物理特性研究可知,粘附力τ的最大值為1.951 N。與此同時,夾持裝置與莖稈之間存在靜摩擦力Ff,方向沿y軸負方向。 以C0為原點,垂直于夾持機構方向為x軸建立的參照坐標系下,可以通過分析取苗點處的受力情況,得到成功拔取穴盤苗的力學條件。 Fx′>G·sinβ Fy′+Ff>G·cosβ+τ (12) 式中: β—— 重力方向與y軸之間的夾角,(°)。 滿足式(12)中拔取穴盤苗的力學條件時,合力方向位于參考坐標系的第三象限,由圖6(a)中穴盤苗質心受力關系可知,取苗點處由于機構運動使穴盤苗質心處受到x、y軸方向的力,其中Fx′值為-0.15 N,Fy′值為-0.10 N。滿足拔取穴盤苗的力學條件,穴盤苗莖稈受到拉伸、彎曲作用力遠遠小于莖稈自身的承受極限,不會對莖稈造成損傷。 由圖6(b)可知,時間為0.27 s時,取苗機構將穴盤苗連同基質完整取出,完成整個取苗階段,該點為脫盤點,即第二關鍵點。此時Fy′與G·sinβ反向,方向為參考坐標系的x軸的正方向,且Fx′>G·sinβ,x軸方向的合力為正;此時Fy′與G·cosβ同向,且Fy′>G·cosβ,合力方向為正。脫盤點處,穴盤苗基質與穴盤之間完全分離,不存在粘附力τ。夾持手爪與莖稈之間仍然存在靜摩擦力Ff,且方向沿y軸負方向。通過分析第二關鍵點處的受力情況,得到穴盤苗脫盤的力學條件。 Fx′>G·sinβ Ff>Fy′+G·cosβ (13) 滿足式(13)中穴盤苗脫盤的力學條件時,合力方向位于參考坐標系的第四象限。由圖5可知,脫盤點處由于取苗機構運動而使穴盤苗質心處受到x軸方向的力Fx′值為0.46 N,Fy′值為0.28 N。當穴盤苗連帶基質成功脫盤時,穴盤苗莖稈受到拉伸、彎曲作用力小于莖稈自身的承受極限,不會對莖稈造成損傷。穴盤苗受到沿取苗運動軌跡方向的合力,該點處的穴盤苗可能會出現輕微振動的情況,穴盤苗處于被夾持的狀態,姿態并不受影響,但可能影響穴盤苗基質的完整度。 由圖6(c)可知,時間為0.48 s時,夾莖式取苗機構攜帶穴盤苗到達栽植點,即第三關鍵點。此時夾持手爪張開,釋放穴盤苗,夾持手爪與莖稈之間不存在靜摩擦力Ff。Fx′的方向為參考坐標系的x軸的正方向,Fy′的方向為參考坐標系的y軸正方向,且Fy′與G方向一致,合力方向為負。分析栽植點處的受力情況,得到穴盤苗釋放時的力學條件。 Fx′≥0 G+Fy′>0 (14) 滿足式(14)中栽植點處穴盤苗釋放的力學條件時,由圖5可知,此時穴盤苗質心受到取苗機構運動產生的沿x、y軸方向的力Fx′值為0.007 3 N,Fy′值為0.004 9 N,合力方向位于參考坐標系的第一象限。穴盤苗莖稈受到拉伸、彎曲作用力幾乎為0,穴盤苗質心在栽植點處的受力主要來自穴盤苗自身重力,不會對莖稈造成損傷。穴盤苗在釋放的瞬間受到的合力,會導致穴盤苗姿態向左側傾斜,影響栽植直立度。Fx′與Fy′越小,穴盤苗的傾斜程度就越小。必要情況下,可以配備覆土鎮壓裝置,在穴盤苗釋放的瞬間進行覆土鎮壓,保證較好的栽植直立度,達到良好的移栽效果。 3.3 力學方程臨界條件 根據取苗栽植過程的力學條件方程,確定穴盤苗質量、機構轉速、夾持裝置與穴盤苗莖稈之間的摩擦系數是影響栽植質量的主要因素。運用控制變量法,依次確定與穴盤苗拔取、脫盤、栽植釋放動作相關的各因素的臨界條件。 已知穴盤苗質量為4.22~6.39 g、夾持裝置夾持力為12.885 N、粘附力τ的最大值為1.951 N,結合取苗栽植過程關鍵點處力學條件方程,將上述參數代入方程,求得臨界值:機構轉速的臨界值為105.4 r/min。穴盤苗質量的臨界值為8.34 g。夾持裝置與穴盤苗莖稈之間的摩擦系數的臨界值為0.147。 4 穴盤苗栽植參數優化試驗 4.1 試驗材料與設備 試驗于2021年9月在南京農業機械化研究所內進行,辣椒穴盤苗品種為蕭新19號甜椒,穴盤孔為128孔,高度為45 mm,苗齡45天。儀器包括:穴盤苗夾莖式取苗機構、托盤天平、計算機等。 4.2 試驗方法 根據穴盤苗拔取、脫盤、栽植點處的臨界條件,確定影響因素為機構轉速、穴盤苗質量、夾持裝置與莖稈之間的摩擦系數。采用三因素三水平的Box-Behnken響應曲面試驗法進行參數優化試驗,夾持裝置與莖稈之間的摩擦系數與夾片材料種類有關,選用各材料摩擦系數:橡膠(摩擦系數為0.6)>硅膠(摩擦系數為0.4)>尼龍(摩擦系數為0.2)。以運移成功率Y為評價指標,共進行17組試驗,因素水平表如表3所示。 試驗選用生長狀態良好的適栽期穴盤苗作為試驗對象,用夾莖式取苗機構樣機進行取苗運移試驗,記錄運移成功率。機構轉速通過調速器進行控制,穴盤苗質量為4.00~7.00 g;通過更換不同材質的夾持裝置改變摩擦系數,試驗結果如表4所示,A、B、C分別為機構轉速、穴盤苗質量、摩擦系數的編碼值。 4.3 試驗結果與分析 由表5回歸方程分析可知,運移成功率回歸模型P<0.05,顯著,表明該回歸模型具有統計學意義;失擬項P>0.05,表明該模型擬合度高;其校正決定系數R為0.951 4>0.8,說明試驗值能由該模型解釋。置信度95%下采用F檢驗,回歸方程如式(15)所示。 Y= 90.67-1.67A-1.17B-1.00C+0.17AB- 0.16AC+0.16BC-4.08A2-3.08B2- 2.75C2 (15) 由回歸方程分析結果可知,一次項A、B和二次項A2、B2、C2對運移成功率影響顯著。 由圖7可知,摩擦系數為0.4時,在穴盤苗質量各個水平下,運移成功率隨機構轉速的增大,先增加后減小。 機構轉速逐漸增大,穴盤苗受到沖擊力的作用,更容易在栽植點處順利脫苗,運移成功率逐漸增大。超出范圍后,機構轉速越大,對穴盤苗產生的沖擊越大,穴盤苗無法保證良好的取苗質量,造成穴盤苗運移成功率下降。 質量為5.50 g時,在機構轉速各個水平下,運移成功率隨摩擦系數的增大,先增加后減小。其原因為機構轉速增大,穴盤苗質心受到機構運動所產生的力增大,需要增大摩擦系數提供更大的摩擦力。當超出提供摩擦力的范圍,運移成功率降低。 利用Design-Expert 12軟件中約束條件求解模塊,得到最優運移成功率下的參數組合:機構轉速68 r/min,穴盤苗質量5.20 g,摩擦系數0.36,最優運移成功率91.04%。 5 結論 1) 通過辣椒穴盤苗莖稈拉伸、彎曲力學特性試驗、穴盤苗脫盤力試驗,得到辣椒穴盤苗莖稈的力學特性參數。 2) 建立辣椒穴盤苗質心模型、取苗機構的運動學模型和動力學模型,運用MatLab軟件繪制取苗機構運動所產生的作用力與時間關系曲線,分別得到取苗點、脫盤點、栽植點三大關鍵點處的力學方程。 3) 根據穴盤苗質心的力學方程,確定穴盤苗質量、機構轉速、夾持裝置與穴盤苗莖稈之間的摩擦系數是影響栽植質量的主要因素。運用控制變量法得到各因素的臨界值分別為:穴盤苗質量臨界值為8.34 g,機構轉速臨界值為105.4 r/min,夾持部件與穴盤苗莖稈之間的摩擦系數的臨界值為0.147。 4) 采用Box-Behnken響應曲面試驗法,對機構轉速、穴盤苗質量、夾持裝置與穴盤苗莖稈之間的摩擦系數三個因素對穴盤苗運移成功率的影響進行分析并得到優化后參數組合:機構轉速68 r/min,穴盤苗質量5.20 g,摩擦系數0.36,最優運移成功率91.04%。 參 考 文 獻 [1] 王娟娟, 楊莎, 張曦. 我國特色蔬菜產業形勢與思考[J]. 中國蔬菜, 2020(6): 1-5. [2] 肖昌華, 曠碧峰, 余席茂, 等. 茄果類蔬菜穴盤育苗的優勢及關鍵技術[J]. 上海蔬菜, 2020(2): 21-22. [3] 岳建魁, 郭俊先, 梁佳, 等. 國內外移栽機械發展現狀[J]. 新疆農機化, 2016(5): 30-32, 36. Yue Jiankui, Guo Junxian, Liang Jia, et al. The development status of transplanting machinery at home and abroad [J]. Xinjiang Agricultural Mechanization, 2016(5): 30-32, 36. [4] 于曉旭, 趙勻, 陳寶成, 等. 移栽機械發展現狀與展望[J]. 農業機械學報, 2014, 45(8): 44-53. Yu Xiaoxu, Zhao Yun, Chen Baocheng, et al. Current situation and prospect of transplanter [J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(8): 44-53. [5] 崔志超, 管春松, 楊雅婷, 等. 蔬菜機械化移栽技術與裝備研究現狀[J]. 中國農機化學報, 2020, 41(3): 85-92. Cui Zhichao, Guan Chunsong, Yang Yating, et al. Research status of vegetable mechanical transplanting technology and equipment [J]. Journal of Chinese Agricultural Mechanization, 2020, 41(3): 85-92. [6] 王英, 陳建能, 吳加偉, 等. 用于機械化栽植的西蘭花缽苗力學特性試驗[J]. 農業工程學報, 2014(24): 1-10. Wang Ying, Chen Jianneng, Wu Jiawei, et al. Mechanics property experiment of broccoli seedling oriented to mechanized planting [J]. Transactions of the Chinese Society of Agricultural Engineering, 2014(24): 1-10. [7] 馬瑞峻, 蕭金慶, 鄭普峰, 等. 穴盤水稻秧苗莖稈蠕變與應力松弛特性的試驗研究[J]. 農業工程學報, 2018, 34(13): 43-53. Ma Ruijun, Xiao Jinqing, Zheng Pufeng, et al. Experimental study on characteristics of creep and stress relaxation for rice seedling stem raised in cell tray [J]. Transactions of the Chinese Society of Agricultural Engineering, 2018, 34(13): 43-53. [8] 繆小花, 毛罕平, 韓綠化, 等. 黃瓜穴盤苗拉拔力及缽體抗壓性能影響因素分析[J]. 農業機械學報, 2013(S1): 27-32. Miao Xiaohua, Mao Hanping, Han Lühua, et al. Analysis of influencing factors on force of picking plug seedlings and pressure resistance of plug seedlings [J]. Transactions of the Chinese Society for Agricultural Machinery, 2013(S1): 27-32. [9] 劉洋, 毛罕平, 韓綠化, 等. 基于Micro-CT的黃瓜苗坨夾取破損檢測及取苗參數優化[J]. 農業工程學報, 2018, 34(12): 27-34. Liu Yang, Mao Hanping, Han Lühua, et al. Plug damage detection and parameter optimization of picking up cucumber seedlings from tray cells based on Micro-CT [J]. Transactions of the Chinese Society of Agricultural Engineering, 2018, 34(12): 27-34. [10] 劉姣娣, 曹衛彬, 田東洋, 等. 基于苗缽力學特性的自動移栽機執行機構參數優化試驗[J]. 農業工程學報, 2016, 32(16): 32-39. Liu Jiaodi, Cao Weibin, Tian Dongyang, et al. Optimization experiment of transplanting actuator parameters based on mechanical property of seedling pot [J]. Transactions of the Chinese Society of Agricultural Engineering, 2016, 32(16): 32-39. [11] 王俊, 張海洋, 金鑫, 等. 穴盤苗自動移栽機苗缽夾持力檢測系統設計與試驗[J]. 農業機械學報, 2019, 50(5): 79-87. Wang Jun, Zhang Haiyang, Jin Xin, et al. Design and experiment of seedling bowl clamping force detection system for plug seedling automatic transplanter [J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(5): 79-87. [12] 任志端, 王衛兵, 馮靜安, 等. 穴盤苗基質力學特性試驗[J]. 中國農機化學報, 2020, 41(4): 169-174. Ren Zhirui, Wang Weibing, Feng Jingan, et al. Experimental study on mechanical properties of plug seedlings [J]. Journal of Chinese Agricultural Mechanization, 2020, 41(4): 169-174. [13] 宋琦, 喻俊志, 王衛兵, 等. 番茄穴盤苗缽體的力學特性分析與優化[J]. 濟南大學學報(自然科學版), 2019, 33(6): 529-536. Song Qi, Yu Junzhi, Wang Weibing, et al. Analysis and optimization of mechanical properties of tomato seedling pot [J]. Journal of University of Jinan (Science and Technology), 2019, 33(6): 529-536. [14] 趙雄, 崔海洋, 代麗, 等. 混合驅動五桿花卉盤栽機構的優化設計與試驗[J]. 農業工程學報, 2017, 33(15): 34-40. Zhao Xiong, Cui Haiyang, Dai Li, et al. Optimal design and experiment of hybrid-driven five-bar flower potted-seedling transplanting mechanism [J]. Transactions of the Chinese Society of Agricultural Engineering, 2017, 33(15): 34-40. [15] 孫良, 沈嘉豪, 周譽株, 等. 非圓齒輪—連桿組合傳動式蔬菜缽苗移栽機構設計[J]. 農業工程學報, 2019, 35(10): 26-33. Sun Liang, Shen Jiahao, Zhou Yuzhu, et al. Design of non-circular gear linkage combination driving type vegetable pot seedling transplanting mechanism [J]. Transactions of the Chinese Society of Agricultural Engineering, 2019, 35(10): 26-33. [16] 李華, 曹衛彬, 李樹峰, 等. 辣椒穴盤苗自動取苗機構運動學分析與試驗[J]. 農業工程學報, 2015(23): 20-27. Li Hua, Cao Weibin, Li Shufeng, et al. Kinematic analysis and test on automatic pick-up mechanism for chili plug seedling [J]. Transactions of the Chinese Society of Agricultural Engineering, 2015(23): 20-27. [17] 陳建能, 夏旭東, 王英, 等. 缽苗在鴨嘴式栽植機構中的運動微分方程及應用試驗[J]. 農業工程學報, 2015(3): 31-39. Chen Jianneng, Xia Xudong, Wang Ying, et al. Motion differential equations of seedling in duckbilled planting nozzle and its application experiment [J]. Transactions of the Chinese Society of Agricultural Engineering, 2015(3): 31-39. [18] 王英, 夏旭東, 何小晶, 等. 偏心橢圓齒輪行星輪系栽植裝置動力學優化與試驗[J]. 農業機械學報, 2017, 48(1): 38-46. Wang Ying, Xia Xudong, He Xiaojing, et al. Dynamics optimization and experiment of planting device driven by planetary eccentric gears and elliptic gears [J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(1): 38-46. [19] 金鑫, 姬江濤, 劉衛想, 等. 基于缽苗運動動力學模型的鴨嘴式移栽機結構優化[J]. 農業工程學報, 2018, 34(9): 58-67. Jin Xin, Ji Jiangtao, Liu Weixiang, et al. Structural optimization of duckbilled transplanter based on dynamic model of pot seedling movement [J]. Transactions of the Chinese Society of Agricultural Engineering, 2018, 34(9): 58-67. [20] 胡喬磊, 廖慶喜, 王洋. 油菜機械移栽載苗基質塊力學與生物學特性分析[J]. 農業工程學報, 2019, 35(24): 58-65. Hu Qiaolei, Liao Qingxi, Wang Yang. Mechanical and biological characteristics analysis of mechanically transplanted rapeseed substrate block seedlings [J]. Transactions of the Chinese Society of Agricultural Engineering, 2019, 35(24): 58-65. [21] 廖慶喜, 王洋, 胡喬磊, 等. 油菜基質塊苗移栽機取苗裝置設計與試驗[J]. 農業機械學報, 2020, 51(11): 93-102. Liao Qingxi, Wang Yang, Hu Qiaolei, et al. Design and parameter analysis of seedling collection device of rapeseed substrate block seedlings transplanter machine [J]. Transactions of the Chinese Society of Agricultural Engineering, 2020, 51(11): 93-102.