自走式大蒜播種施肥一體機優化設計與試驗
2023-08-04 12:50:50代祥宋海潮于林惠曾曉萍馬金駿
中國農機化學報 2023年7期
代祥 宋海潮 于林惠 曾曉萍 馬金駿


摘要:針對當前大蒜種植機械化程度較低的現狀,設計一款自走式大蒜播種施肥一體機,并進行田間試驗。采用蒜鏈與取種勺配合實現大蒜取種和輸送,采用外槽輪排肥器實現肥料供給,并基于芯鏵式開溝鏟實現開溝;基于大蒜播種與施肥功能一體化要求,在降低整機尺寸、提高緊湊程度和效率的基礎上,實現傳動鏈有效分配,使其具有完善的自走功能,并能夠有效調節種植株距;合理設計平行四邊形舉升機構,實現開溝鏟和壓輥自動升降,方便調節播施深度;基于ANSYS Workbench,在評估機架靜力學、模態及頻率響應的基礎上進行型材優選,實現結構性能提升和減重。田間試驗結果表明,提高運動速度和降低種植株距會導致漏播率明顯上升,重播率下降,但整體播種合格率仍會較大程度降低;以邳州白蒜為對象,保持種植株距為120mm,機具運動速度為15m/min時,平均播種合格率為86.1%,漏播率為8.7%,重播率為5.2%,滿足技術標準要求;預設施肥深度為6.2cm時平均施肥深度為6.22cm,施肥穩定系數為96.40%。機具能夠有效滿足大蒜播種與施肥的一體化要求。
關鍵詞:大蒜;播種施肥;一體化機具;自走式
中圖分類號:TP391.41: S482
文獻標識碼:A
文章編號:20955553 (2023) 070016
10
Optimized design and experiment of the self-propelled garlic drilling and
fertilizing integrated machine
Dai Xiang1, Song Haichao1, Yu Linhui1, Zeng Xiaoping2, Ma Jinjun2
(1. College of Mechanical Engineering, Nanjing Vocational University of Industry Technology, Nanjing,
210023, China; 2. Jiangsu Agricultural Technology Extension Station, Nanjing, 210029, China)
Abstract: A self-propelled garlic planting and fertilizing integrated machine was designed, and preliminary field experiments were conducted. The combination of the garlic picking chains and spoons realized garlic picking and transportation. The outer-fluted fertilizer apparatus was used to supply fertilizers. Double-wing ditchers were used to excavate ditches. Based on the requirements of integration of garlic drilling and fertilizing, the position, structure, and parameters of each assembly were determined to reduce the size and improve the compactness of the machine, and realize an effective distribution of the transmission chain, enabling adjustable plating spacing and thorough self-propelled function. The lifting mechanism was designed with a parallelogram structure, allowing for automatic lifting and lowering of the ditcher. Based on numerical simulation through ANSYS Workbench, the frame was optimized by evaluating the statics, modal, and frequency response to achieve performance improvements and weight reduction. Field experiment results indicated that increasing the movement speed and reducing the planting distance led to a significant increase in the missing planting rate and a decrease in reseeding rate, resulting in a decrease in overall drilling qualified rate. However, when the planting distance was set at 120mm for Pizhou garlic and the machines speed was 15m/min, the average qualified rate of drilling was 86.1%, the average missing rate was 8.7%, and the average reseeding rate was 5.2%, meeting the required technical standards. Additionally, the average fertilization depth was 6.22cm with a stability coefficient of 96.40% when the preset fertilizer depth was 6.2cm, indicating satisfactory fertilization performance. Therefore, the machine can effectively realize mechanized drilling of garlic with reliable fertilization efficacy.
Keywords: garlic; drilling and fertilizing; integrated machine; self-propelled
0 引言
大蒜在我國種植較為廣泛,是部分地區的支柱性農產品生產類別。目前,我國的大蒜種植仍以手工作業為主,具有勞動強度大,效率低下,難以持續的特點,因此推廣大蒜機械化種植是大蒜產業可持續發展的必由之路,大蒜種植機械化的實現對提高大蒜種植效益、增加農民收入具有重要意義[12]。
大蒜播種機械按照其驅動方式可分為牽引式(懸掛式)和自走式,前者指大蒜播種機械自身無動力,需要由拖拉機等設備進行牽引驅動[34],目前,比較典型的有山東瑪利亞農機所開發的旋耕式大蒜播種機[5],機具將土壤旋耕功能和大蒜直立插播技術結合,既能夠平整土地,也能實現較好的播種效果,但是較大的整機尺寸和重量限制了其應用,且其價格較為昂貴,不適宜于小農經濟模式下農民采購和使用;侯加林等[6]研發了一種采用雙鴨嘴實現大蒜正芽,行星輪結構實現大蒜插播的播種機械,依靠地輪的滑移動力滿足裝置正常運轉的需要,但該機具造價相對較高;張嬌等研發了一種排種裝置可調節的、單粒取種和播種的新型牽引式大蒜播種機械,能夠通過改變型孔調節長度適應不同尺寸蒜種,該機具無大蒜正芽播種功能,故整體結構較為簡潔,但其一方面需要拖拉機牽引,另一方面因無自動施肥功能,難以滿足部分地區大蒜種植農藝需求,因此整體功能有進一步完善的空間。
自走式大蒜播種機械目前在市場上也占有一定份額,其正常運轉依靠自身發動機提供動力,能同時滿足機具的正常運轉、行走、開溝和播種功能[7];Park[8]設計的大蒜播種機,由一臺內燃機提供動力,一名駕駛員進行操控,蒜種經機械結構頂升后由圓周旋轉的刷子掃入播種管道,落入開溝器開好的溝內,經由覆土機構覆土后完成播種;王成文等[9]設計的六行手扶式大蒜播種機,適用于小規模種植,且操作簡單、機具成本低,但類似機具并不能有效實現播種與施肥的同時進行,因此難以滿足部分情況下大蒜播種與施肥同時進行的農藝要求,且機具設計中缺乏嚴格的理論計算和力學校核,合理性仍有待提高。
針對當前我國大蒜種植機械存在的問題,面向江蘇邳州地區大蒜種植需求,本文參照國內外先進機型,通過理論設計、數值仿真計算相結合的方法,研制一款自走式大蒜播種施肥一體機,以有效實現大蒜播種與施肥的一體化。并且,本文通過進一步的田間播種施肥試驗,對機具各項設計技術指標參數進行驗證,從而對其性能進行合理評估。
1 整機結構及工作原理
1.1 整機結構
為滿足自走式大蒜播種施肥一體化的功能需求,機具包含動力、主軸運動、轉向、取種、施肥、開溝系統,以及機架和覆板等,如圖1(a)所示。通過對國內外現有機型研究并結合設計要求,確定了播種機設計方案,采用虛擬樣機技術,使用SolidWorks軟件完成了樣機初步的虛擬零件設計及裝配建模,作為結構優化和關鍵零部件設計的基礎條件,如圖1(b)所示。
1.2 工作原理
自走式大蒜播種施肥一體機動力均由一臺汽油發動機提供,機架與差速主軸外緣剛性固定;通過播種變速箱調節播種速度,實現種植株距調整,通過取種鏈、勺協同工作,將大蒜從種箱輸運至播種開溝鏟上方釋放;通過施肥軸的運轉帶動排肥器工作,將肥料輸送至肥料輸送管,并最終從施肥開溝鏟上方下落,實現自主施肥;開溝系統則為平行四邊形機構,通過兩側推桿電機實現開溝鏟的舉升和下降,完成播種與運輸模式的切換以及播施深度在一定范圍內的調節,播種和施肥完畢后,通過鎮壓輥將開溝撫平,覆蓋蒜種和肥料。
1.3 工作參數
按照邳州白蒜的種植模式與農藝要求,確定樣機設計所需主要參數指標如表1所示,滿足邳州白蒜小農種植戶的種植需求。
2 主要工作部件設計
2.1 整機傳動系統的確定
整機傳動系統對于確保機具正常播種和施肥至關重要,需要保證機具工作狀態下機具前進速度與播種速度的正確匹配。
n2Zfp=1 000πn1Ds
(1)
式中:
n1——主軸轉速,r/min;
n2——取種軸轉速,r/min;
Zf——取種鏈輪齒數;
s——播種株距,mm;
D——地輪直徑,m;
p——種勺安裝節距數。
整機采用前輪驅動,后輪轉向的方式,傳動系統如圖2所示,主要采用鏈傳動實現遠距離的恒定傳動比動力傳輸。
根據待選汽油機系列的普遍輸出轉速(1 800~3 600r/min),選擇WD20-4型蝸輪蝸桿減速機進行一級減速;選擇Z4型農用變速箱作為行車主變速箱,具有離合裝置,能夠實現不同檔位動力傳輸;選擇鵬灃小六檔播種變速箱進行株距調整;機具滿足一檔條件下運動速度10~20m/min(平均15m/min)要求。
2.2 動力系統設計
2.2.1 行走驅動力
1) 驅動輪驅動機具播種所需動力計算。自走式機具在前進過程中,驅動輪(地輪)在主軸轉矩作用下進行轉動,且在垂直載荷產生的摩擦力下驅動整機前進,驅動地輪的受力分析如圖3所示,此時驅動輪處于平衡狀態,在輪軸中心點O處受到驅動力矩Mq和摩擦力矩Mn的作用。
根據文獻[10],在地輪與土壤的接觸點A,存在土壤對地輪的支撐反力Ry、行走阻力Rx,在地輪與壓實地面的接觸點,存在與機具運動方向相同且作用于地輪下端的摩擦力Ff,摩擦力Ff正是驅動機具前進的直接作用力,各力關系如式(2)~式(4)所示。
∑Fx=0, Ff-Rx=0
(2)
∑Fy=0, G-Ry=0
(3)
∑MA=0, Mq-Mn=Ry·a+Ff·r-Rx·rd
(4)
式中:
Ff——摩擦力,N;
G——作用于輪軸的垂直載荷,N;
Rx——行走阻力,N;
Ry——土壤對地輪的支撐反力,N;
a——A點與主軸之間的水平距離,m;
rd——A點與主軸之間的垂直距離,m;
MA——驅動地輪所受合力矩,N·m;
Mn——輪軸間的摩擦力矩,N·m;
Mq——主軸驅動力矩,N·m。
為保證驅動輪能夠正常運動,避免輪胎滑移,從而保證種植過程正常并獲得準確的種植株距,需要滿足摩擦力Ff大于行走阻力Rx,并確保主軸驅動力矩滿足式(5)。
Mq≥Ry·a+Ff·r-Rx·rd+Mn
(5)
依靠摩擦力Ff克服行走阻力Rx驅動機具向前運動,由于地輪的下陷量相對地輪直徑而言不得太大,因此行走阻力Rx主要為壓實阻力[10],作用在輪軸間的垂直載荷G等于驅動輪與土壤接觸各點所共同提供的垂直反力,驅動力Fq由摩擦力Ff提供,即
G=∫cosαdR
(6)
Fq=∫sinαdR
(7)
將地輪與土壤的相關參數[10]代入式(6)和式(7),則地輪下陷深度y0和驅動力Fq計算公式分別如式(8)和式(9)所示。
y0=2G(3-n)kbD22n+1
(8)
Fq=1(3-n)3n+22n+1(n+1)b12n+1k12n+13GD2n+22n+1
(9)
式中:
R——輪緣上土壤提供的合力,N;
b——地輪寬度,m;
k、n——土壤壓實參數。
由式(8)~式(9)可知,驅動地輪的陷入深度y0和所需最低驅動力Fq取決于土壤特性(k,n)、地輪直徑(D)、地輪寬度(b)以及垂直載荷(G)。因此,降低行走阻力,減小地輪下陷的有效措施是增大地輪直徑D,結合整機外觀協調程度,以及機具在邳州大蒜種植地區土壤條件(播種時具有一定的土壤濕度)下的適應性,可選擇D=65cm鴨掌輪作為驅動輪,若將土壤壓實參數中的n設置為1[10],考慮整機質量最大不超過300kg,且整機質量基本集中在主軸周邊,因此驅動輪承擔了整機絕大部分重量,且經初步試驗知種植土壤環境下驅動輪下陷不超過4cm,因此經計算驅動力Fq最低為644N。
2)? 芯鏵式開溝鏟驅動力。芯鏵式開溝鏟是一種銳角開溝器。工作時,先由芯鏵入土開溝,兩側板向兩側分土形成種溝,蒜種和化肥從開溝器兩側間落入溝內,當側板通過后,土壤落入溝內覆蓋蒜種和肥料[11];如圖4所示,其傾角為70°,鏟翼張角為80°,兼顧鏟面高度、切土、覆土能力,開溝鏟寬度為46mm,最大開溝深度為90mm。邳州白蒜的種植深度通常為3~5cm,因此開溝深度至少需5~6cm,能同時滿足肥料施用的基本要求,考慮到耕地已經旋耕處理,因此單個開溝鏟按照上述開溝參數進行作業時受到的阻力較小,試驗表明單個開溝鏟受力最大不超過60N,因此,包括播種開溝鏟和施肥開溝鏟在內受到的阻力之和Fc最大為360N。
2.2.2 驅動功率
用于工作狀態下行走驅動的合力F包括驅動輪驅動整機在松軟土壤上前進的力Fq和開溝鏟破土前進的力Fc,即
F=Fq+Fc
(10)
由于用于驅動大蒜取種和排肥裝置運轉所需的功率明顯小于用于行走驅動的功率,因此在估算總功率時,選擇一分配系數ζ作為行走功率在整機功率中的占比,則發動機所需的輸出功率P與用于驅動機具行走的功率P1之間存在估計關系如式(11)、式(12)所示。
P·ζ·η1·η2·η3·η4·η5≥σ·P1
(11)
P1=Fvave
(12)
式中:
P——發動機輸出功率,W;
P1——驅動機具行走的功率,W;
η1——離合式甩塊聯軸器傳動效率,取0.70;
η2——蝸輪蝸桿減速機效率,取0.60;
η3——V帶傳動效率,取0.96;
η4——行車主變速箱傳動效率,取0.95;
η5——兩級鏈傳動傳動效率,取0.92;
ζ——
行走驅動功率分配系數,本文取70%;
σ——安全系數,本文取1.5;
vave——
播施狀態下機具運動速度,取0.25m/s。
根據上述計算,從整機總功率、安裝尺寸、發動機操控性上綜合考慮,選擇市場上較為成熟的5.5kW汽油發動機作為動力源,以確保整機功率充沛。
2.3 種箱和肥料箱設計
種箱和肥料箱均安裝在機架上方。種箱的容量可根據機具所需播種距離L和播種密度Nmax進行估算。
V=0.88LbNmax10005γ
(13)
式中:
V——種箱容積,L;
Lb——播種機播種距離,m;
γ——蒜種單位容積質量,kg/L;
Nmax——
單位面積最大播種量,kg/hm2。
種箱結構如圖5(a)所示,其長、高分別為800mm和400mm,頂部寬420mm,底部寬275mm,種箱設計有效容積80L,種箱底部間隔220mm開有蒜鏈孔,其形狀仿照蒜勺外形進行設計。肥料箱結構如圖5(b)所示,其容量可以根據配套種箱容積,按照蒜種與肥料的播施比例以及肥料的容重進行確定
Vf=Vγkγ1
(14)
式中:
Vf——肥料箱容積,L;
k——播施比例;
γ1——肥料單位容積質量,kg/L。
結合整機結構緊湊的設計需要,最終確定肥料箱長度679mm,頂部寬232mm,底部寬110mm,整體高度為72mm,其設計基礎有效容積超過10L,并能夠進一步通過擴展縱向立板的方式擴容至40L,滿足不同施肥比例下的應用需求。
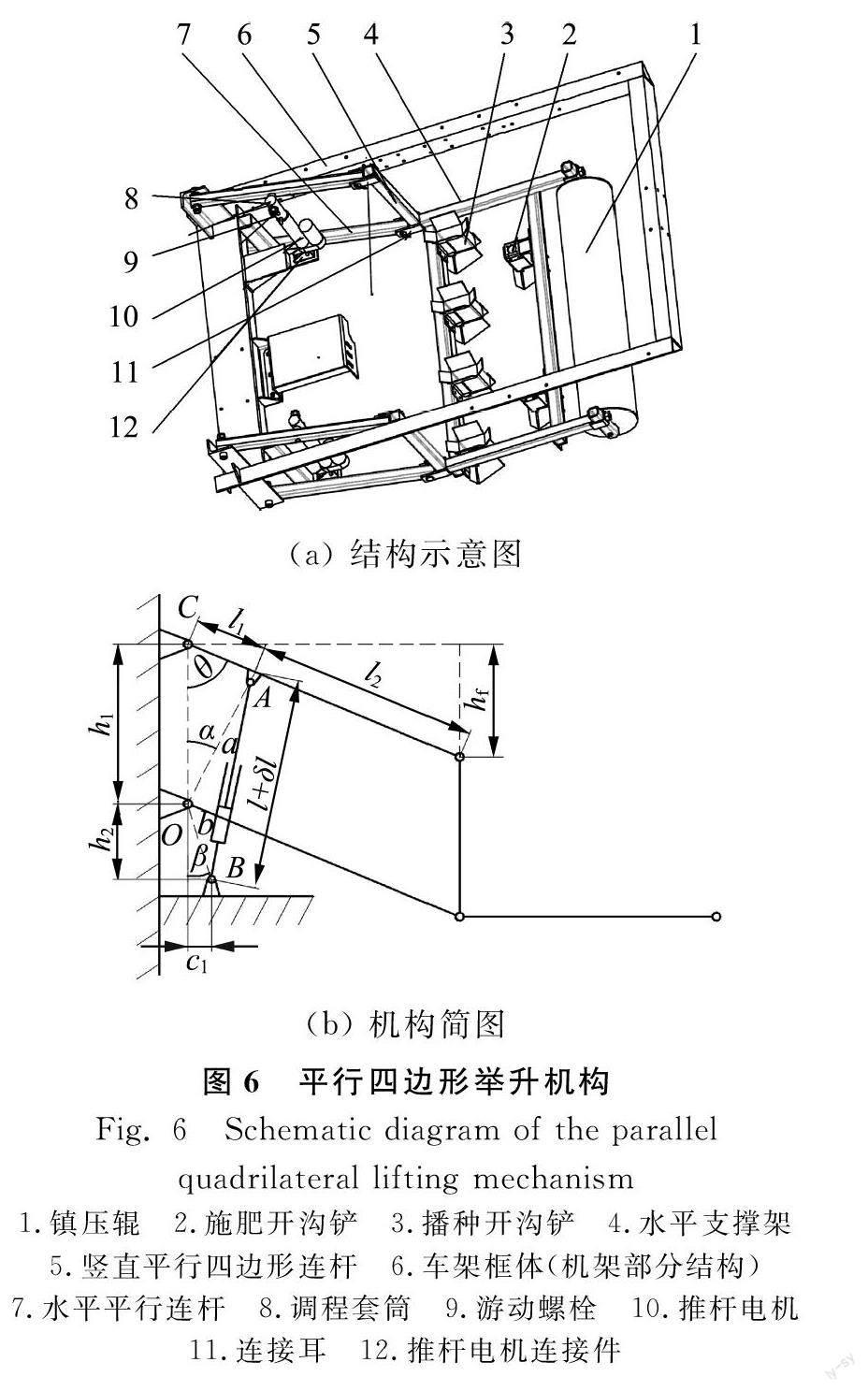
2.4 平行四邊形舉升機構設計
平行四邊形舉升機構如圖6(a)所示,機構簡圖如圖6(b)所示。
平行四邊形機構由推桿電機實現其舉升和下降,其末端水平支撐架上安裝有播種開溝鏟、施肥開溝鏟和鎮壓輥作為工作部件。若上部水平連桿與機架豎直部分的夾角為θ,伸長后的推桿電機長度為Ld,則存在式(15)~式(19),可以根據舉升后的夾角θ和相關尺寸確定推桿電機導程ldmax[12]。
a=l12+h12+2h1l1cosθ
(15)
b=c12+h22
(16)
α=arcsinl1sinθa,β=arctanc1h2
(17)
hf=(l1+l2)cosθ
(18)
Ld
=l+δl=a2+b2-2abcos(α+β)
=f(θ)
(19)
式中:
l——推桿電機收縮安裝長度,m;
δl——
推桿電機伸長量,最大值即為導程ldmax,m。
由于推桿電機舉升和放低機構的速度較慢,因此可只對機構進行靜力學分析,平行四邊形機構的受力分析如圖7(a)所示,忽略平行四邊形機構本身的重量,僅考慮開溝鏟和壓輥所帶來的重量負載[13],則存在式(20)~式(23),用于估計推桿電機所需推力Ft,Ft最終與重力Gp和夾角θ有關。
F1=F2
(20)
F1(l1+l2)sinθ=Gp·[(l1+l2)sinθ+l3]
(21)
Ldsin(π-α-β)=bsinγ
(22)
Ft=F2(l1+l2)sinθl1cosγ
(23)
電動推桿選型時應考慮推桿運動速度、推力和推桿電機單轉位移量等參數[14]。結合虛擬樣機的部分結構限制,考慮安裝方便性,根據各設計尺寸確定ldmax為100mm,結合基于ANSYS Workbench的剛體動力學求解,如圖7(b)所示,推桿電機以2mm/s運動速度伸長的過程中,其單機最大推力需要252N,因此選用常州路易BMXL推桿電機,單機最大推力1000N,滿足舉升力學要求,且兩只推桿電機同時作動進一步增加了設計裕度;通過PWM控制器調節電機的啟停、正反轉以及速度,精確控制推桿伸縮行程數據,滿足不同播深需求,推桿電機相關參數關系如式(24)和式(25)所示。
lr=60vana
(24)
Ft=2TηdπRalr
(25)
式中:
lr——推桿電機單轉位移量,mm;
na——電機轉速,r/min;
va——推桿線速度,mm/s;
Ft——電動推桿推力,kN;
T——電機扭矩,N·m;
Ra——減速比;
ηd——電動推桿綜合傳動效率。
2.5 機架的輕量化設計
整機輕量化的核心在于降低除標準件外其它結構的重量,因此降低機架的結構重量是關鍵[15],其結構如圖8(a)所示,整體采用焊接加工。采用ANSYS Workbench進行機架輕量化設計,減速機安裝平板一端與前設備安裝平板焊接,另一端與主軸焊接固定,因此其一方面承載減速機等裝置的重量(100N),另一方面以遠端位移的形式對機架進行約束,前設備安裝平板則承載發動機等重量(200N),平行四邊形豎直連接梁用于連接平行四邊形機構,其上下端部螺孔受力經圖7(b)剛體力學以及開溝鏟負載計算,均約為105N,方向與地面成30°角,推桿電機安裝底座承載推力(252N),主軸安裝點為遠端位移約束,車架框體、平行四邊形豎直連接梁和轉向輪安裝梁采用同一標號GB/T 9788—1988不等邊角鋼制造并占據機架主要重量,車架框體上承載取種系統部分重量約500N,種箱安裝橫梁包括兩根GB/T 6728—1986方形25mm×25mm空心方鋼,種箱和肥料箱滿載后重量最大約500N,轉向輪安裝梁采用遠端位移進行約束。根據圖8(a)可知,輕量化的核心是在滿足性能的前提下使用重量小的GB/T 9788—1988不等邊角鋼型號[16],其材料為結構鋼。因此,在能夠滿足零部件安裝的要求下,對機架采用不同型號不等邊角鋼進行模型構建,并分別進行靜力學、模態和諧波響應分析。圖8(b)給出了機架靜力學分析云圖,可見前設備安裝平板與車架框體結合點是靜力條件下整機結構最薄弱處。
表2給出了不同材料尺寸選用下的最大等效應力和低階固有頻率。對于1~3號鋼材,隨著厚度增高,其剛度改善,等效應力值存在一定上升現象,但由于不同材料尺寸對應最大等效應力均明顯小于結構鋼的屈服強度,因此整機不存在強度不足問題。然而,隨著厚度、剛度的提升,其低階固有頻率也存在一定上升,其中一階頻率從25.78Hz上升至33.24Hz,二階頻率從70.89Hz上升至76.21Hz,考慮到發動機振動頻率在30~60Hz之間,因此較低鋼材厚度能夠避免機架一階固有頻率落在發動機激勵頻率區間內;而對于1號、4號和5號鋼材而言,隨著邊長的降低,其最大等效應力和一階固有頻率存在上升現象,而二階頻率則從70.89Hz下降至62.71Hz,并逼近激勵頻率區間,顯然不宜選擇尺寸較小的不等邊角鋼。因此,從結構性能、結構減重角度考慮,7mm×4.5mm×4mm不等邊角鋼是最優選擇。
圖9(a)和圖9(b)為機架的一階和二階振型位移云圖,可以看出,低階情況下機架的振動仍以繞機架軸線的擺動為主,其最大位移出現在轉向輪安裝梁與車架框體的連接處,以及推桿電機安裝底座上,因此實際加工時考慮在此處添加加強筋進行結構補強。圖9(c)為種箱安裝橫梁和轉向輪安裝梁在發動機以頻率為31~60Hz,幅值為100N簡諧力激勵下的縱向位移響應。
整體上,其振動幅值較小,且種箱安裝橫梁上的振動效應均比轉向輪安裝梁上更加明顯,隨著發動機振動頻率增加,不同部位的幅值均有提升,并在高于約50Hz時上升較為顯著,這在實際工作中將表現出隨著發動機轉速增高而機具振動愈發明顯的效應,但其整體振動并不顯著。
3 田間試驗與結果分析
3.1 試驗內容
樣機試驗前首先對種植區域進行松土碎土作業,保證一定的土壤濕度,使得土壤環境與實際大蒜種植土壤環境類似,為種植做好準備;田間試驗需統計播種合格率PH,重播率PL,漏播率PC,并進行大蒜播種平均深度的測量,肥料選用普通顆粒肥;試驗所用蒜種為邳州白蒜,長度為25~38mm,直徑為13~26mm。試驗樣機如圖10所示。
3.2 試驗方法
自走式大蒜播種裝置參照《GB/T 6973—2005單粒(精密)播種機試驗方法》進行田間播種測試[17]。
PH=naNp
(26)
PL=nLNp
(27)
PC=nCNp
(28)
式中:
na——
合格株距數(株距在理論株距1±0.51倍范圍之內為合格);
nL——
漏播株距數(株距大于理論株距1.51倍);
nC——
重播株距數(株距小于理論株距0.51倍);
Np——測量株距數。
針對施肥效果,主要從施肥深度進行施肥有效性衡量[18],包括平均施肥深度h-,種植深度標準差std,以及施肥穩定系數μ。
h-=∑nti=1hint
(29)
std=∑nti=1(hi-h-)2nt-1
(30)
μ=1-stdh-
(31)
式中:
hi——采樣點施肥深度,cm;
nt——采樣點個數。
3.3 試驗結果及分析
機具播種過程中通過綜合調節檔位和油門控制機具作業速度,通過調節播種變速箱檔位實現播種株距的調整。為保證測試準確,在測試起始位置和終止位置均設有預留區,測試過程中記錄機具的實際運行速度;播種完成后,清除大蒜上部土壤,測量株距,每組試驗重復5次,結果如圖11所示。
圖11(a)是株距Dp為120mm時,機具不同運動速度Vb下的播種效果變化趨勢,隨著Vb提高,漏播率PL逐漸上升,且在Vb高于15m/min時增加明顯,漏播變得愈發嚴重,而重播率PC則隨著Vb降低緩慢下降,但幅度不明顯,其整體播種合格率PH則表現出先增高再逐步降低的現象,但整體上當Vb≤17m/min時,PH變化仍相對較小;圖11(b)是Vb為15m/min時不同播種株距DP條件下的播種效果,隨著DP降低,PL上升明顯,從DP為142mm時的8.3%顯著提升至80mm時的21.4%,而PC則隨著DP的降低表現出輕微下降的現象。這是由于提高Vb或降低DP實際上加快了取種鏈條運動,因此難以穩定取種,且Vb較高時發動機振動頻率增加,機架本身的振動也變得突出,導致漏播加劇;此外,由于蒜勺取種性能下降,單勺多粒取種的現象得到了緩解,因此使得PC降低,但由于PC的降低無法彌補PL的顯著上升,因此在較高的取種速度下PH無法得到保證,整體上,該機具當Vb≤17m/min,DP≥102mm時,PH仍相對較高。
圖12給出了不同預設施肥深度下的實際施肥效果。通過調節電動推桿的伸縮長度改變平行四邊形舉升高度能夠實現施肥深度的有效調節,預設深度與實際平均施肥深度間差異較小。較大的預設施肥深度能夠取得更高的施肥穩定系數,當施肥深度≥4.7cm時,施肥穩定系數普遍接近或高于0.95,能夠取得較好的施肥穩定性。
以邳州白蒜為對象,標準DP為120mm,表3給出了Vb為15m/min時具體的播施效果數據,平均PH為86.1%,平均PL為8.7%,平均PC為5.2%,均能夠滿足技術要求,表明該機具在面向邳州白蒜種植應用時播種功能能夠良好實現,未來可進一步通過選種并搭配合適的取種勺實現PL和PC的降低;預設施肥深度為6.2cm時,實際平均深度為6.22cm,施肥穩定系數μ為96.40%,施肥功能表現良好,表明整機在播施功能的實現上達到了預定要求。
4 結論
1) 基于鏈勺取種方式設計了一款自走式大蒜播種施肥一體機,實現大蒜擺播與苗前施肥同步進行;機具可實現運輸和播施狀態切換,多檔調速和株距調整,滿足不同場景下大蒜播種需求;操控人員處于機具后方以保證安全性。
2) 結合待選發動機型號、驅動輪直徑以及預期機具運動速度范圍,對整機傳動方式及傳動比進行確定;根據整機預估重量,基于機具一定陷深所需驅動力以及開溝鏟阻力進行播施一體條件下所需動力計算,并結合傳動鏈效率確定整機發動機功率為5.5kW;確定了種箱和施肥箱關鍵尺寸,對平行四邊形舉升機構進行了結構參數計算,并基于力學分析確定了推桿電機的關鍵性能參數;基于ANSYS Workbench對機架的靜力學、模態和頻率響應特性進行分析,確定了最優型材參數,在滿足所需性能的基礎上降低機架重量。
3) 田間試驗結果表明,增加運動速度和降低播種株距均會導致漏播率明顯上升,盡管重播率存在下降趨勢,但整體播種合格率仍會受到較大負面影響,該機具整體上適合于株距≥102mm,運動速度≤17m/min條件下的播種應用。以邳州白蒜為對象,株距為120mm,運動速度為15m/min時,其平均播種合格率為86.1%,平均漏播率為8.7%,平均重播率為5.2%,能夠有效實現播種功能,滿足技術標準要求;預設施肥深度為6.2cm時,施肥穩定系數為96.40%,施肥功能良好;整機能夠有效滿足大蒜播種與施肥一體化要求。
參 考 文 獻
[1] 李天華, 黃圣海, 牛子孺, 等. 行星輪式大蒜插播機播種直立度優化與試驗[J]. 農業工程學報, 2020, 36(3): 37-45.
Li Tianhua, Huang Shenghai, Niu Ziru, et al. Optimization and experiment of planting perpendicularity of planetary wheel garlic planter [J]. Transactions of the Chinese Society of Agricultural Engineering, 2020, 36(3): 37-45.
[2] 李彥棟, 牛長河, 賈生濤. 大蒜播種機械化研究進展分析[J]. 新疆農機化, 2021(2): 29-33.
Li Yandong, Niu Changhe, Jia Shengtao. Analysis of the current research situation on mechanized garlic seeding [J]. Xinjiang Agricultural Mechanization, 2021(2): 29-33.
[3] 崔榮江, 黃嘉寶, 張振河, 等. 大蒜機械化播種技術研究現狀[J]. 農業裝備與車輛工程, 2018, 56(6): 54-56.
Cui Rongjiang, Huang Jiabao, Zhang Zhenhe, et al. Research status of garlic mechanized sowing technology [J]. Agricultural Equipment & Vehicle Engineering, 2018, 56(6): 54-56.
[4] 劉澤松, 王浩屹, 李驊, 等. 基于有限元的大蒜播種機機架輕量化設計[J].中國農機化學報, 2022, 43(1):27-32.
Liu Zesong, Wang Haoyi, Li Hua, et al. Lightweight design of a garlic planter frame based on finite element method [J]. Journal of Chinese Agricultural Mechanization, 2022, 43(1): 27-32.
[5] 辛麗. 一種大蒜播種機[P]. 中國專利: CN206932593U, 2018-01-30.
[6] 侯加林, 黃圣海, 牛子孺, 等. 雙鴨嘴式大蒜正頭裝置調頭機理分析與試驗[J]. 農業機械學報, 2018, 49(11): 87-96.
Hou Jialin, Huang Shenghai, Niu Ziru, et al. Mechanism analysis and test of adjusting garlics upwards using two duckbill devices [J]. Transactions of the Chinese Society of Agricultural Machinery, 2018, 49(11): 87-96.
[7] 耿愛軍, 栗曉宇, 侯加林, 等. 自動定向大蒜播種機的設計與試驗[J]. 農業工程學報, 2018, 34(11): 17-25.
Geng Aijun, Li Xiaoyu, Hou Jialin, et al. Design and experiment of automatic directing garlic planter [J]. Transactions of the Chinese Society of Agricultural Engineering, 2018, 34(11): 17-25.
[8] Park D C. A garlic seeder [P]. Korea Patent: KR20130130184A, 2013-12-02.
[9] 王成文, 鐘志堂, 崔軍, 等. 六行手扶式大蒜播種機[P]. 中國專利: CN209824385U, 2019-12-24.
[10] 李彥棟, 石鑫, 牛長河, 等. 大蒜播種機地輪及鋪管覆膜機構改進設計與試驗[J]. 中國農機化學報, 2021, 42(5): 35-41.
Li Yandong, Shi Xin, Niu Changhe, et al. Improved design and test of garlic planters ground wheel and pipe laying and film-covering mechanism [J]. Journal of Chinese Agricultural Mechanization, 2021, 42(5): 35-41.
[11] 張強, 梁留鎖. 農業機械學[M]. 北京: 化學工業出版社, 2016.
[12] Fong S, Leong P K, Min H N, et al. Modeling and analyzing of spring-loaded double parallelogram mechanism using moment balance [J]. Journal of Physics Conference, 2021, 1777(1): 12-63.
[13] 劉建坤, 南江紅, 王光輝, 等. 基于平行四邊形機構的天線舉升裝置設計[J].機械設計與制造工程, 2021, 50(5): 33-38.
Liu Jiankun, Nan Jianghong, Wang Guanghui, et al. Design of a lifting device of radar antenna based on parallel-crank mechanism [J]. Machine Design and Manufacturing Engineering, 2021, 50(5): 33-38.
[14] 徐琪蒙, 李洪文, 何進, 等. 小麥播種自走式農用移動平臺設計與試驗[J]. 農業工程學報, 2021, 37(14): 1-11.
Xu Qimeng, Li Hongwen, He Jin, et al. Design and experiment of the self-propelled agricultural mobile platform for wheat seeding [J].Transactions of the Chinese Society of Agricultural Engineering, 2021, 37(14): 1-11.
[15] 李俊虎, 王衛兵, 郭德卿, 等. 免耕播種機仿形機構的模態分析與優化[J]. 中國農機化學報, 2016, 37(7): 14-18.
Li Junhu, Wang Weibing, Guo Deqing, et al. Modal analysis and optimization of the organization of no-till planter [J]. Journal of Chinese Agricultural Mechanization, 2016, 37(7): 14-18.
[16] GB 9788—1988, 熱軋不等邊角鋼尺寸、外形、重量及允許偏差[S].
[17] GB/T 6973—2005, 單粒(精密)播種機試驗方法[S].
[18] 孫會彬. 果園分層施肥機及其關鍵部件的設計與試驗[D]. 長春: 吉林大學, 2021.
Sun Huibin. Design and experiment of layered variable orchard fertilization machine and key components [D]. Changchun: Jilin University, 2021.