辣椒穴盤苗自動取投苗裝置設計與試驗
2023-08-04 12:50:50孫正薛龍何梁劉木華黎靜鄭建鴻
中國農機化學報 2023年7期
孫正 薛龍 何梁 劉木華 黎靜 鄭建鴻
摘要:針對現有的半自動辣椒移栽機效率低、勞動強度大的問題,設計一種自動取投苗裝置。該裝置由夾苗部件、平移機構、垂直移動機構、控制系統和穴盤架等組成。控制系統驅動平移機構和垂直移動機構運動,分別帶動夾苗部件和穴盤使其產生聯動,實現夾苗部件依次從穴孔中將辣椒苗拔出,然后移動到導苗管上方投苗,完成整個取投苗過程。用72孔穴盤育苗,選取55天苗齡的辣椒穴盤苗為研究對象,對5盤共360株辣椒穴盤苗,以15株/min的移栽速度,進行取投苗試驗,試驗結果得到:取苗成功率為96.39%,投苗成功率為98.27%,莖葉損傷率為7.79%,滿足辣椒穴盤苗移栽的農藝要求,該研究可為自動化移栽機的設計提供參考。
關鍵詞:全自動移栽機;自動取投苗機構;辣椒穴盤苗;夾莖式;蔬菜移栽
中圖分類號:S223.9
文獻標識碼:A
文章編號:20955553 (2023) 070048
07
Design and experiments of automatic taking and throwing device for chili plug seedlings
Sun Zheng1, Xue Long1, 2, He Liang1, Liu Muhua1, 2, Li Jing1, 2, Zheng Jianhong1
(1. College of Engineering, Jiangxi Agricultural University, Nanchang, 330045, China;
2. Jiangxi Province Key Laboratory of Modern Agricultural Equipment, Nanchang, 330045, China)
Abstract: To address the problems of low efficiency and high labor intensity of the existing semi-automatic pepper transplanter, an automatic seedling taking and dropping device was designed. The device was composed of seedling clamping parts, a translation mechanism and vertical movement mechanism, a control system, a hole tray frame, and other components. The control system drove the translation and vertical moving mechanisms, which in turn drove the seedling clamping parts and the hole plate to produce joint movement, respectively. This process enabled the seedling clamping parts to pull out the chili seedlings from the hole sequentially, and then move them to the top of the seedling guide tube to drop them, completing the whole process of seedling taking and dropping. The seedlings were raised with 72-hole trays, and the 55-day-old chili plug seedlings were selected as the research object. A total of 360 chili plug seedlings were transplanted in 5 trays at the rate of 15 plants per minute. The experiment results showed that the success rate of seedling extraction was 96.39%, the success rate of seedling infusion was 98.27%, and the stem and leaf damage rate was 7.79%. This study can provide a reference for the design of automatic transplanters.
Keywords: automatic transplanter; automatic seedling taking and throwing mechanism; chili plug seedlings; clip stem type; vegetable transplanting
0 引言
辣椒是江西等省市的主要經濟作物,但辣椒移栽用工成本高,全自動辣椒移栽機是解決辣椒移栽勞動強度大、效率低等問題的主要方式[13]。全自動移栽機與半自動相比增加了自動取苗機構,因此設計合理的自動取投苗機構是辣椒移栽自動化的必經之路[45]。
國外對于自動移栽機研究起步較早[68],例如,美國Agriplant全自動移栽機,該機通過取苗手從穴盤中成排取苗,生產效率可達2.5hm2/d,但價格昂貴,后期維修不方便[9]。日本洋馬PF2R全自動蔬菜移栽機是小型全自動移栽機,用自動取苗器夾取穴盤苗,育苗需用可蜷曲專業育苗盤,成本較高[10]。這兩種全自動移栽機成本較高,維修不便,對于國內的生產并不適用。
近年來,國內學者對全自動取投苗機構的研究越來越多[1114],主要類型有插入夾取式取苗機構、頂出式取苗機構和夾莖式取苗機構。針對插入夾取式取苗機構的研究有:黨玉功等[15]設計的開式鉸鏈四連桿型取投苗機械臂,用行星輪系和凸輪高副對轉動副進行約束,最終設計了一種單自由度全機械式的取投苗機構;石喬等[16]設計的一種蔬菜苗移栽機自動取投苗裝置,得到了一組優化連桿與凸輪結構參數,使其取苗指末端能以一定姿態及軌跡插入缽苗基質中取苗。這類機構操作控制簡單,但是其執行末端插入基質進行取苗,易對苗根和基質造成損傷。針對頂出式取苗機構的研究有:金鑫等[17]設計了一種蔬菜移栽穴盤苗自動輸送裝置,該機構用圓柱凸輪機構和齒輪—槽輪機構頂出穴盤苗,結合配套設計的取投苗機構實現自動取投苗,但該類機構有損傷穴盤苗根部的可能。針對夾莖式取苗機構的研究有:趙曉琪等[18]重點對取苗機構進行了設計,該取苗機構使用氣動加剎車線柔性變距機構實現變距投苗功能,由于氣動動力源特殊,加大了其實際應用的難度。現有取投苗機構存在易損傷穴盤苗根部和基質,以及動力源為氣動,難以投入實際生產的問題。
針對現有移栽機自動取投苗裝置存在易損傷穴盤苗根部和基質,以及氣動動力源難以投入實際生產等問題,在查閱國內外相關文獻資料的基礎上,本文采用夾取辣椒穴盤苗莖稈的取苗方式以降低穴盤苗和基質損傷率,并采用電動方式以達到驅動能源單一化,增強適用性的目的。
1 整機機構與工作原理
1.1 整機結構
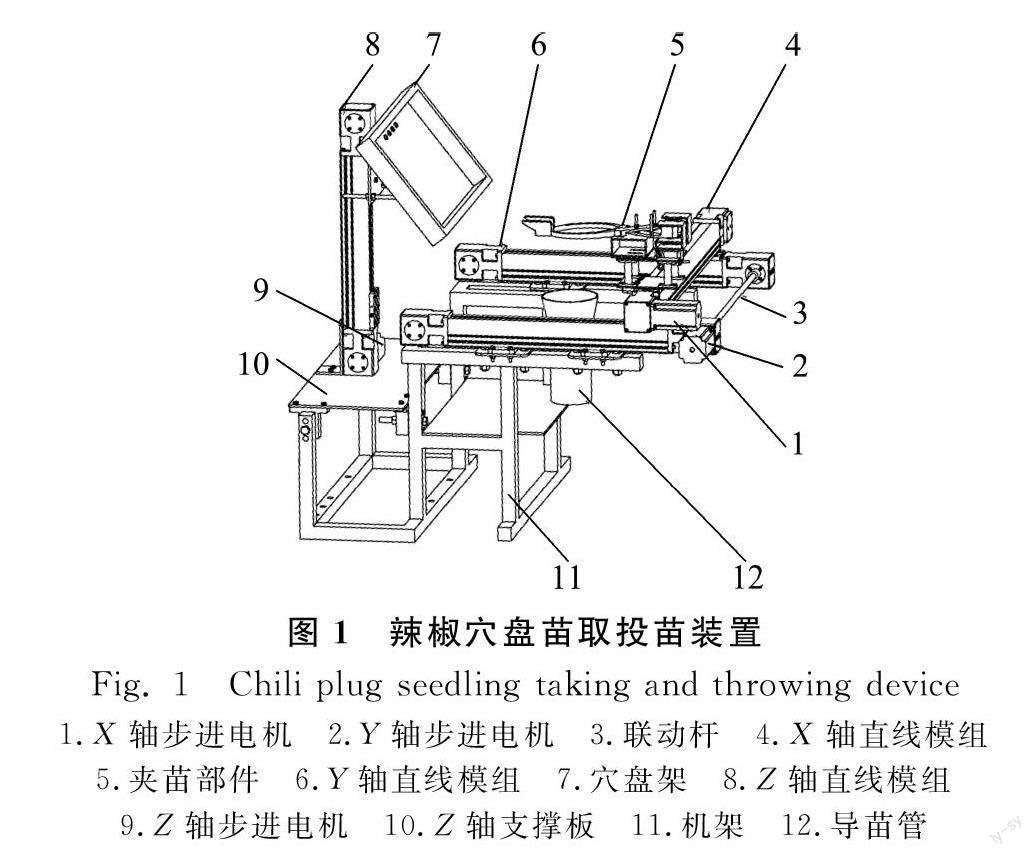
辣椒穴盤苗取投苗裝置由機架、夾苗部件、平移裝置、導苗管和控制系統組成,如圖1所示。平移裝置分為夾苗部件平移機構和育苗盤垂直移動機構,夾苗部件通過平移機構實現橫向和縱向移動,育苗盤搭載于穴盤架上,穴盤架與直線模組上的滑塊連接帶動育苗盤實現垂直方向的上下移動。
如圖1所示,兩個滑塊行程為0~400mm的Y軸直線模組通過連接件分別固定在機架上,其中一個直線模組的一端接有Y軸步進電機,遠離Y軸步進電機的方向為Y軸正方向,兩個Y軸直線模組之間由聯動桿連接。滑塊行程為0~600mm的X軸直線模組通過連接件安裝在兩個Y軸直線模組的滑塊上,X軸步進電機通過電機連接件連接在同步帶的一端,滑塊遠離X軸步進電機的方向為X軸正方向。夾苗部件搭載在X軸滑塊上,將夾苗部件設為C軸。滑塊行程為0~250mm的Z軸直線模組是滾珠絲桿直線模組,將此直線模組豎直安裝,滑塊遠離Z軸電機的上升方向設為Z軸正方向,穴盤架搭載在Z軸滑塊上,育苗盤直接放置在穴盤架上。穴盤架的傾斜角度為35°,標準穴盤尺寸寬為280mm,因此穴盤運動范圍為0~229.36mm,Z軸直線模組符合要求。
1.2 工作原理
將穴盤固定在穴盤架上,為了防止夾苗部件和穴盤苗發生干涉,所以將Z軸直線模組滑塊上升,夾苗部件從穴盤最底層的一排孔穴開始取苗。夾苗部件路徑規劃如圖2所示。
整個裝置的工作原理是夾苗部件從起始點A出發,沿路徑1移動到導苗管上方的落苗點B,為了防止在夾苗部件移動過程中執行末端與穴盤苗莖稈發生干涉,因此夾苗部件沿路徑2移動到準備取苗點C,再由Y軸運動使夾苗部件沿路徑3移動到取苗點D,夾苗部件執行夾取動作,執行末端夾取到穴盤苗底部莖稈后,沿路徑4退回到準備取苗點C,執行末端保持夾持穴盤苗狀態、沿路徑5回到落苗點B,此時夾苗部件的執行末端松開穴盤苗,穴盤苗自行下落進導苗管,重復上述步驟。當夾苗部件從左至右夾取完成第一排十二個穴盤苗之后,Z軸滑塊位置下降,帶動苗盤架下降,讓夾苗部件夾取第二排穴孔。以此類推,完成總共六排的取苗動作。
2 關鍵部件設計
2.1 夾苗部件
夾苗部件是本裝置的關鍵部件,在苗盤上夾苗和導苗管上放苗兩個狀態之間運轉。如圖3所示,夾苗部件的取投苗動作有3個過程:(1)取苗,夾苗板移動到穴孔上,兩塊夾苗板在辣椒苗莖稈處進行夾持;(2)運苗,夾苗板夾持住辣椒苗將其從穴盤中拔出并移動到導苗管上方;(3)投苗,夾苗板在導苗管上方張開,辣椒苗自由落體到導苗管中。
針對夾苗部件夾取和放開穴盤苗兩個動作,將上下夾苗臂設計為剪叉形狀,如圖4所示。
上下夾苗臂的中間部分有通孔,用螺栓穿過通孔進行緊固,把上下夾苗臂固定在夾苗臂支撐座上。在上下夾苗臂后端支出螺栓當支柱,支柱上懸掛回位彈簧。在上下夾苗臂后端安裝步進電機,步進電機軸上安裝凸輪,上下夾苗臂后端與凸輪表面接觸,上下夾苗臂后端在拉簧的作用下處于夾緊狀態,后端夾緊凸輪。取苗過程中,凸輪由長邊旋轉到短邊,末端夾苗板由張開變為夾緊,夾住辣椒穴盤苗莖稈;運苗過程則保持住夾苗部件的夾緊狀態,凸輪不旋轉;進行投苗過程時,凸輪由短邊旋轉至長邊,末端夾苗板由夾緊變為張開,穴盤苗便自由下落。
夾苗部件處于夾緊運動狀態時,穴盤苗莖稈所受到的夾持力取決于回位彈簧的拉力。彈簧原長l=40mm,夾緊運動狀態時,彈簧長度與凸輪短邊長度相等即l1=48mm,彈簧還是處于彈性變形的狀態,遵循胡克定律,查詢得到本選型彈簧的彈性系數k=1.22N/mm,因此,彈簧拉力
F1
=k×Δx=k×(l1-l)
=1.22×(48-40)=9.76 N
(1)
夾苗部件的受力分析如圖5所示,F1為彈簧拉力,F2為夾持力作用在缽苗莖稈上的反作用力,力矩平衡得夾持力F2的計算如式(2)所示。
F2=F1×LaLb=9.76×37225=1.6N
(2)
式中:
La——彈簧拉力F1力臂;
Lb——夾持力F2力臂。
夾苗部件有兩個運動狀態,張開和夾緊,上下夾苗臂這兩個狀態之間變化完成夾取穴盤苗和投放穴盤苗的動作。
2.2 控制系統
2.2.1 系統組成
控制系統包括X、Y、Z三軸控制和夾苗部件C軸的控制,整個裝置由4個步進電機組成動力源。X軸、Y軸步進電機的型號為57BYG100-310A,選用的步進電機驅動器是DM542;Z軸步進電機的型號為86BYG250H,選用的步進電機驅動器為DMA860H。C軸步進電機的型號為42BYG48,選用的步進電機驅動器是DM542。控制全體電機的控制器選用2017版TC55運動控制器。電路連接著電機、驅動器、控制器,將各軸電機聯合在一起,實現四軸聯動。首先步進電機上的輸入線有四根,分別是A+、A-、B+、B-,需要連接到電機驅動器的相應位置。電機驅動器上有P+、P-、D+、D-四個接口,需要和四軸控制器上的接口對應連接,且X軸、Y軸、Z軸、C軸四個軸的電機連線對應到控制器的各個接口。整個控制系統供電采用24 V穩壓電源,電源正負極需要接在控制器和四個電機驅動器上。整體連線如圖6所示。
2.2.2 控制器控制原理
四軸運動控制器中搭載著高性能32位CPU,可根據設定好的程序,發送脈沖,從而控制步進電機運轉。步進電機接受一定數量的脈沖,即轉動相應的角度,同步帶上的滑塊即可移動相應的距離。在控制器中輸入的是各軸上滑塊移動的距離和速度,因此控制器需要把移動的距離和速度轉換成脈沖個數和脈沖頻率,再發送到電機驅動器,由驅動器驅動電機完成轉動的角度和速度。
控制器中通過設置重要的轉換參數——電子齒輪,即將滑塊移動的距離轉換成需要發送的脈沖數,計算如式(3)所示。
N=N1N2
(3)
式中:
N——電子齒輪齒數比;
N1——電機轉動一周所需脈沖數;
N2——電機轉動一周滑塊移動距離。
例如X軸參數設置,經過測量,X軸的同步帶上,電機轉動一周,滑塊移動125000μm;而電機單向轉動一周所需要的脈沖數與驅動器所設置的細分有關,如設置為1600pul/r的細分,電機轉動一周需要1600個脈沖。因此X軸電子齒輪計算式如式(4)所示。
1600pul125000μm=8625pul/μm
(4)
若設置X軸滑塊移動200mm,那么控制器要發送的脈沖數計算式如式(5)所示。
200000μm×8pul625μm=2560pul
(5)
速度設置為6000mm/min,那么滑塊移動200mm所需要的時間為2s。
控制器則自動發送2 560個脈沖給X軸控制器,X軸上的滑塊在此條件下移動200mm需要2s。由于從落苗點到72個取苗點的空間距離都不一致,但最終的取苗速度需要確定一個恒定的數值。在控制器中,可以設置絕對運動的各個點的空間坐標,以及運動速度。由于距離和運動時間為確定值,因此需要計算每個點到點運動時的運動速度。將夾苗模塊從落苗點出發,到再次回到落苗點為一個取投苗周期,在這個周期內,夾苗模塊在點與點之間運動的距離總和除以設定的周期時間,即為在此周期內各點運動的平均速度。
取苗機構的取投苗速度由設定的取投苗周期決定。機構的取投苗周期即有20株/min、15株/min、10株/min三個選項。
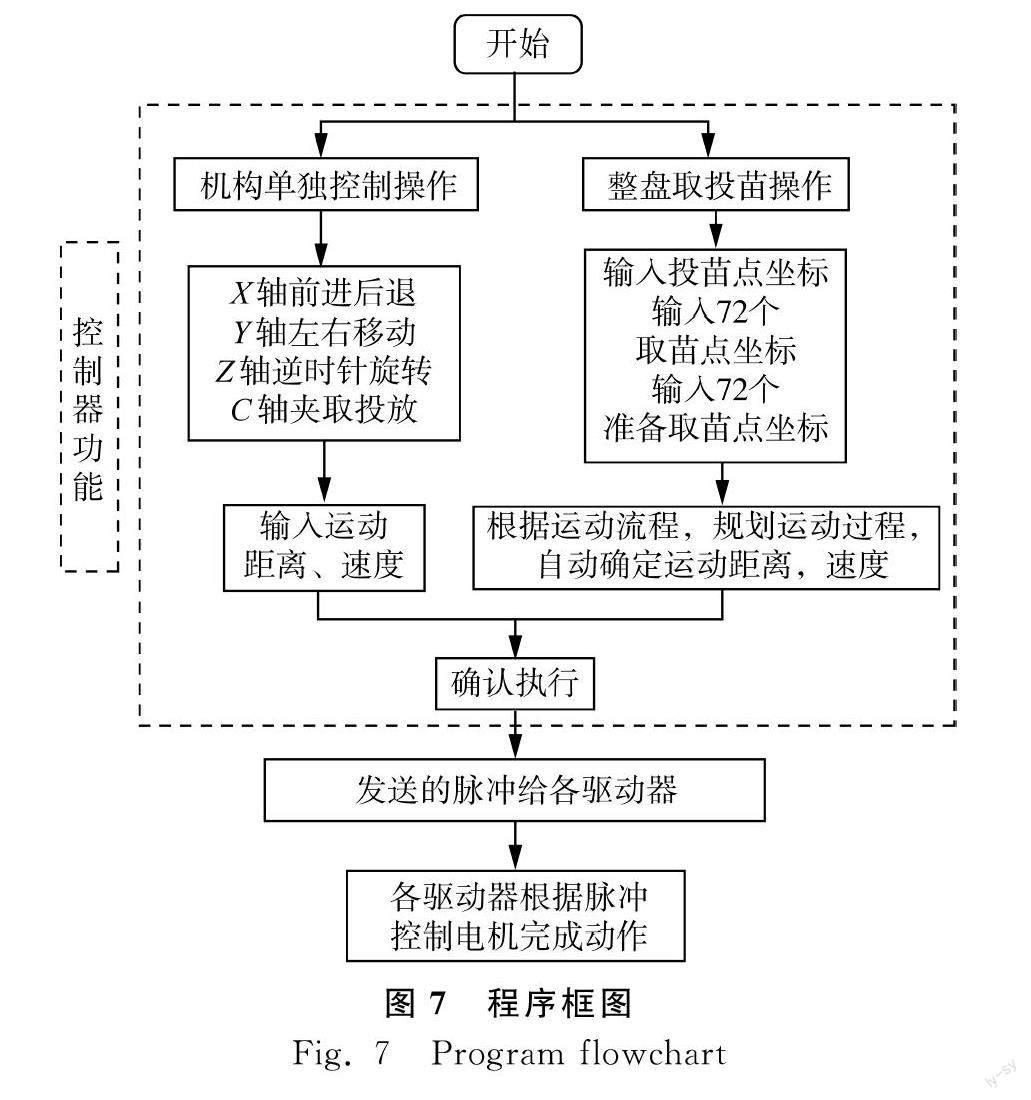
如圖7所示,控制器有兩種模式,一是機構單獨控制操作,可以單獨控制各軸運動;二是整盤取投苗操作,將設定好的各點坐標按照工作原理描述的順序輸入到控制器中,控制器即可按照設定好的運動流程發送相應的脈沖給各軸驅動器,驅動器驅動電機完成運動流程。
3 試驗與分析
3.1 試驗方法與指標
本研究辣椒穴盤苗自動取投苗裝置的取投苗試驗于2021年12月在江西農業大學工學院進行。
試驗對象選取55天苗齡的72孔穴辣椒苗,育苗基質配比按照珍珠巖、蛭石、草炭體積比1∶1∶3,采用基質含水率均值為70%,選取5盤生長一致的穴盤苗進行試驗,測量苗的平均高度為156.8mm,平均莖稈直徑為3.22mm,取苗頻率為15株/min。
試驗方法:將一盤辣椒苗放置在穴盤架上,打開裝置電源開關,在控制器上選擇72孔穴的取苗頻率為15株/min的程序,選擇好程序后,選擇開始按鈕,開始試驗。從穴盤中夾取出來視為取苗成功并記錄株數,將穴盤苗放置到導苗管中的視為投苗成功并記錄株數,觀察取苗時損傷莖葉的缽苗并記錄株數。共選取5盤生長一致的穴盤苗進行5次平行試驗,統計每次試驗的取苗成功數、投苗成功數和損傷莖葉數。
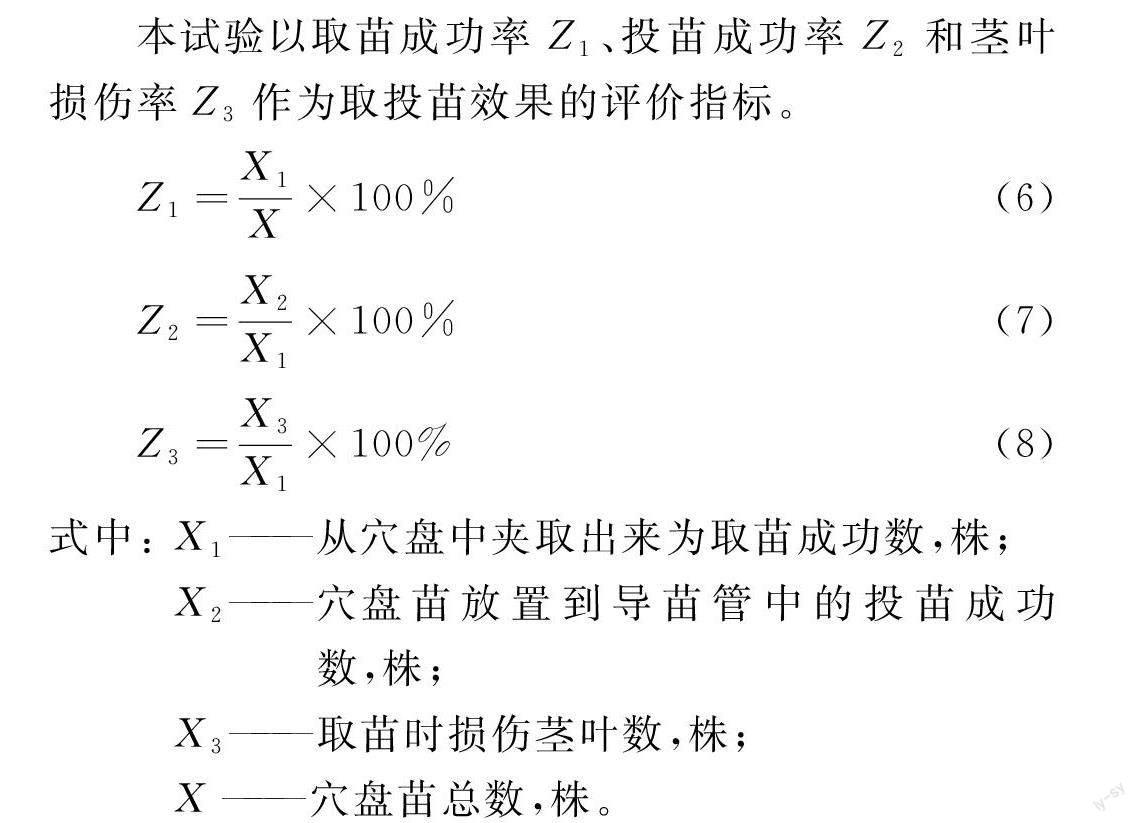
本試驗以取苗成功率Z1、投苗成功率Z2和莖葉損傷率Z3作為取投苗效果的評價指標。
Z1=X1X×100%
(6)
Z2=X2X1×100%
(7)
Z3=X3X1×100%
(8)
式中:
X1——
從穴盤中夾取出來為取苗成功數,株;
X2——
穴盤苗放置到導苗管中的投苗成功數,株;
X3——取苗時損傷莖葉數,株;
X——穴盤苗總數,株。
3.2 結果分析
對360株辣椒穴盤苗進行取投苗試驗,試驗結果如表1所示。
穴盤苗取苗成功率為96.39%,投苗成功率為98.27%,莖葉損傷率為7.79%。夾取穴盤苗時,正常狀態是夾取穴盤苗的莖稈。由于所選用的穴盤苗并不是通過生產線生產的工廠化育苗,生長具有一定隨機性,夾苗部件會夾取到莖稈上的枝葉。因此,影響取苗成功的主要因素是穴盤苗的生長隨機性,個別生長過快的穴盤苗莖稈上方枝葉寬大,取苗時發生干涉導致取苗失敗且損傷莖葉。若選用工廠化育苗的生長一致的適齡辣椒苗,夾取效果將得到提升。夾苗部件夾取穴盤苗并移動到落苗點時,由于慣性,個別穴盤苗的底部土塊晃動幅度大,穴盤苗下落到導苗管之外,導致投苗失敗。本研究的取投苗裝置整個工作過程對穴盤苗根系和基質不會造成損傷,穴盤苗可正常生長發育。
針對取投苗速度的進一步提高,可以更換功率更大的電機來提高直線模組上滑塊的運動速度,繼而加快夾苗模塊的運動速度,達到更佳的取投苗效果,實現高速移栽的目標。
4 結論
1)? 設計了自動取投苗裝置的整體機構部件,包括機架、取苗機構、平移裝置、導苗管和控制系統,利用直線模組組成空間直角坐標系,根據取苗機構和穴盤苗之間的空間位置關系規劃取苗動作與路徑。根據取苗動作,設計了以原長40mm彈簧為動力源,夾持力為1.6N的剪叉式夾苗部件;根據路徑規劃,設計取投苗周期,有20株/min、15株/min、10株/min 3種選項靈活應用。
2)? 設計了控制系統,對整機的硬件和軟件進行設計。硬件設計包括了硬件選型和連接電路設計,電路連接著電機、驅動器、控制器,將各軸電機聯合在一起實現四軸聯動。軟件設計包括了對控制器的控制,根據規劃好的取苗路徑和設定好的取苗頻率,計算控制器中的控制參數,編寫程序,完成穴盤苗72孔位的取苗動作。
3)? 完成了辣椒穴盤苗自動取苗裝置取苗試驗。試驗對象選取5盤55天苗齡的72孔穴辣椒穴盤苗,試驗結果得出:穴盤苗取苗成功率為96.39%,投苗成功率為98.27%,莖葉損傷率為7.79%。試驗表明辣椒穴盤苗自動取投苗裝置可以滿足移栽機相關行業標準,驗證了設計的合理性。
參 考 文 獻
[1] 胡雙燕, 胡敏娟, 王佳. 辣椒穴盤苗機械化移栽研究進展[J]. 中國農機化學報, 2021, 42(8): 24-31.
Hu Shuangyan, Hu Minjuan, Wang Jia. Research progress on mechanized transplanting of pepper plug seedlings [J]. Journal of Chinese Agricultural Mechanization, 2021, 42(8): 24-31.
[2] 趙晉, 黃赟, 潘松, 等. 江西省蔬菜移栽機械化現狀與發展分析[J]. 中國農機化學報, 2020, 41(10): 61-65.
Zhao Jin, Huang Yun, Pan Song, et al. Status and development analysis of vegetable transplanting mechanization in Jiangxi Province [J]. Journal of Chinese Agricultural Mechanization, 2020, 41(10): 61-65.
[3] 崔志超, 管春松, 楊雅婷, 等. 蔬菜機械化移栽技術與裝備研究現狀[J]. 中國農機化學報, 2020, 41(3): 85-92.
Cui Zhichao, Guan Chunsong, Yang Yating, et al. Research status of vegetable mechanical transplanting technology and equipment [J]. Journal of Chinese Agricultural Mechanization, 2020, 41(3): 85-92.
[4] 韓長杰, 肖立強, 徐陽, 等. 辣椒穴盤苗自動移栽機設計與試驗[J]. 農業工程學報, 2021, 37(13): 20-29.
Han Changjie, Xiao Liqiang, Xu Yang, et al. Design and experiment of the automatic transplanter for chili plug seedlings [J]. Transactions of the Chinese Society of Agricultural Engineering, 2021, 37(13): 20-29.
[5] 張靜, 龍新華, 韓長杰, 等. 機械驅動式辣椒穴盤苗自動取投苗系統設計與試驗[J]. 農業工程學報, 2021,37(5): 20-30.
Zhang Jing, Long Xinhua, Han Changjie, et al. Design and experiments of mechanically-driven automatic taking and throwing system for chili plug seedlings [J]. Transactions of the Chinese Society of Agricultural Engineering, 2021, 37(5): 20-30.
[6] Paradkar V, Raheman H, K R. Development of a metering mechanism with serial robotic arm for handling paper pot seedlings in a vegetable transplanter [J]. Artificial Intelligence in Agriculture, 2021, 5: 52-63.
[7] Khadatkar A, Mathur S M, Dubey K, et al. Development of embedded automatic transplanting system in seedling transplanters for precision agriculture [J]. Artificial Intelligence in Agriculture, 2021, 5.
[8] G V P K, H R. Development of a walk-behind type hand tractor powered vegetable transplanter for paper pot seedlings [J]. Biosystems Engineering, 2011, 110(2): 189-197.
[9] 孫曉曉, 劉洋, 李斌, 等. 穴盤苗自動移栽機取苗裝置研究現狀及展望[J]. 中國農機化學報, 2021, 42(3): 22-28.
Sun Xiaoxiao, Liu Yang, Li Bin, et al. Research status and prospect of the seedling collecting device of the automatic transplanter [J]. Journal of Chinese Agricultural Mechanization, 2021, 42(3): 22-28.
[10] 朱興亮, 郭彥克, 韓長杰, 等. 茄果類缽苗自動移栽機設計與試驗[J]. 中國農機化學報, 2021, 42(5): 19-26.
Zhu Xingliang, Guo Yanke, Han Changjie, et al. Design and experiment of automatic transplanter for Solanaceae vegetables pot seedlings [J]. Journal of Chinese Agricultural Mechanization, 2021, 42(5): 19-26.
[11] 胡建平, 常航, 楊麗紅, 等. 自動移栽機整排取苗間隔投苗控制系統設計與試驗[J]. 農業機械學報, 2018, 49(6): 78-84.
Hu Jianping, Chang Hang, Yang Lihong, et al. Design and experiment of control system for automatic transplanter picking up and spacing casting whole row of seedlings [J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(6): 78-84.
[12] 袁挺, 王棟, 文永雙, 等. 蔬菜移栽機氣吹振動復合式取苗機構設計與試驗[J]. 農業機械學報, 2019, 50(10): 80-87.
Yuan Ting, Wang Dong, Wen Yongshuang, et al. Design and experiment of seedlings unloading mechanism based on methods of air-blowing and vibration for vegetable transplanter [J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(10): 80-87.
[13] 伍龍, 劉念聰, 王艷華, 等. 基于PLC的全自動移栽機取苗喂苗控制系統設計[J]. 中國農機化學報, 2021, 42(10): 87-91.
Wu Long, Liu Niancong, Wang Yanhua, et al. Design of the control system for picking up and feeding seedlings of automatic transplanter based on PLC [J]. Journal of Chinese Agricultural Mechanization, 2021, 42(10): 87-91.
[14] 徐陶, 崔志超, 管春松, 等. 基質塊苗移栽機送取苗裝置的設計與試驗[J]. 中國農機化學報, 2021, 42(7): 50-55.
Xu Tao, Cui Zhichao, Guan Chunsong, et al. Design and experiment of sending and taking seedling device of substrate block seedling transplanter [J]. Journal of Chinese Agricultural Mechanization, 2021, 42(7): 50-55.
[15] 黨玉功, 金鑫, 李衡金, 等. 單自由度四連桿取投苗機械臂設計[J]. 農業工程學報, 2019, 35(14): 39-47.
Dang Yugong, Jin Xin, Li Hengjin, et al. Design of single-degree-of-freedom four-bar seedling-taking and throwing manipulator [J]. Transactions of the Chinese Society of Agricultural Engineering, 2019, 35(14): 39-47.
[16] 石喬, 劉劍雄, 曾家興, 等. 一種蔬菜苗移栽機自動取投苗裝置夾取軌跡優化[J]. 中國農機化學報, 2021, 42(8): 47-54.
Shi Qiao, Liu Jianxiong, Zeng Jiaxing, et al. Optimization of the clamping trajectory of an automatic fetching and throwing device of a vegetable seedling transplanter [J]. Journal of Chinese Agricultural Mechanization, 2021, 42(8): 47-54.
[17] 金鑫, 杜新武, 楊傳華, 等. 蔬菜移栽穴盤苗自動輸送裝置設計與試驗[J]. 農業機械學報, 2016, 47(7): 103-111.
Jin Xin, Du Xinwu, Yano Chuanhu, et al. Design and experiment on automatic transporting mechanism for vegetable potted seedlings [J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(7): 103-111.
[18] 趙曉琪, 楊啟志, 黃冠龍, 等. 小型穴盤苗全自動移栽機取苗機構的設計與試驗[J]. 江蘇大學學報(自然科學版), 2022, 43(1): 54-61.
Zhao Xiaoqi, Yang Qizhi, Huang Guanlong, et al. Design and test of picking seedling mechanism of small full-automatic transplanter for plug seedlings [J]. Journal of Jiangsu University (Natural Science Edition), 2022, 43(1): 54-61.
王志彬, 傅楊, 喬曉軍, 等. 臭氧植保機在設施蔬菜苗期病害防治中的應用研究[J]. 中國農機化學報, 2023, 44(7): 55-62
Wang Zhibin, Fu Yang, Qiao Xiaojun, et al. Application of ozone sterilizer devices for controlling vegetable diseases during seeding stages in greenhouse [J]. Journal of Chinese Agricultural Mechanization, 2023, 44(7): 55-62